Advanced Energy Conversion Systems: BLDC Motor Analysis
VerifiedAdded on 2022/09/15
|15
|2004
|18
Report
AI Summary
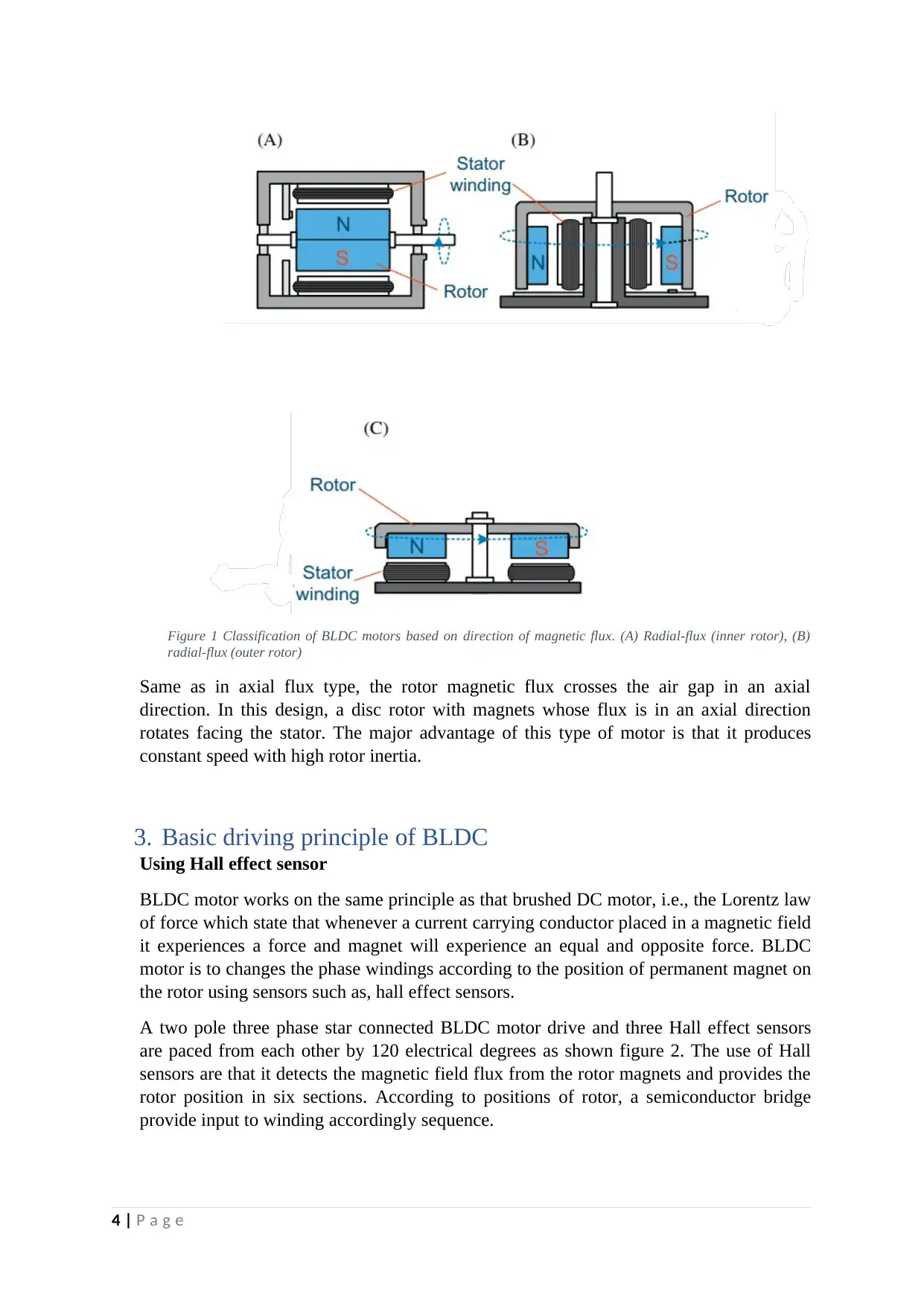
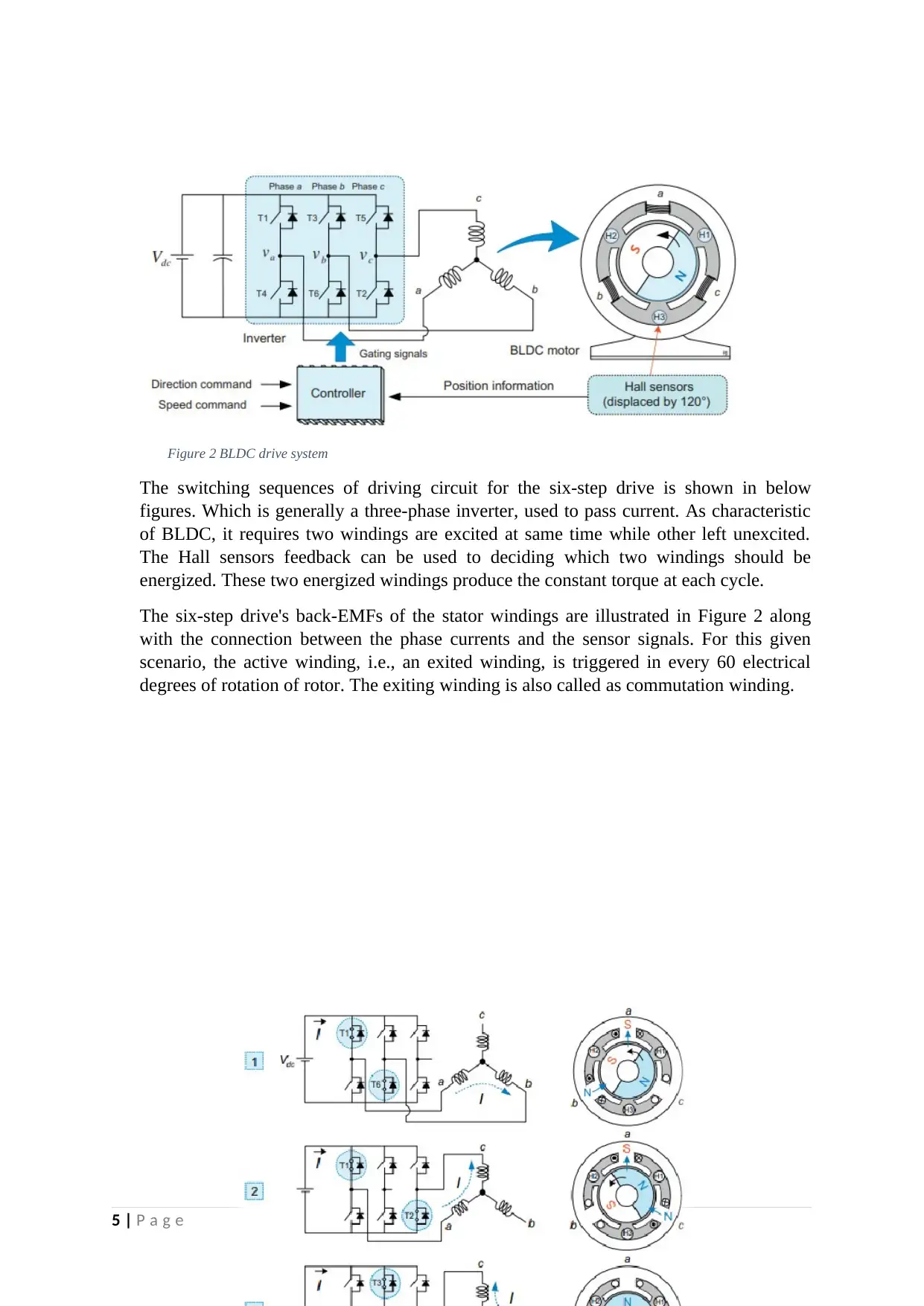
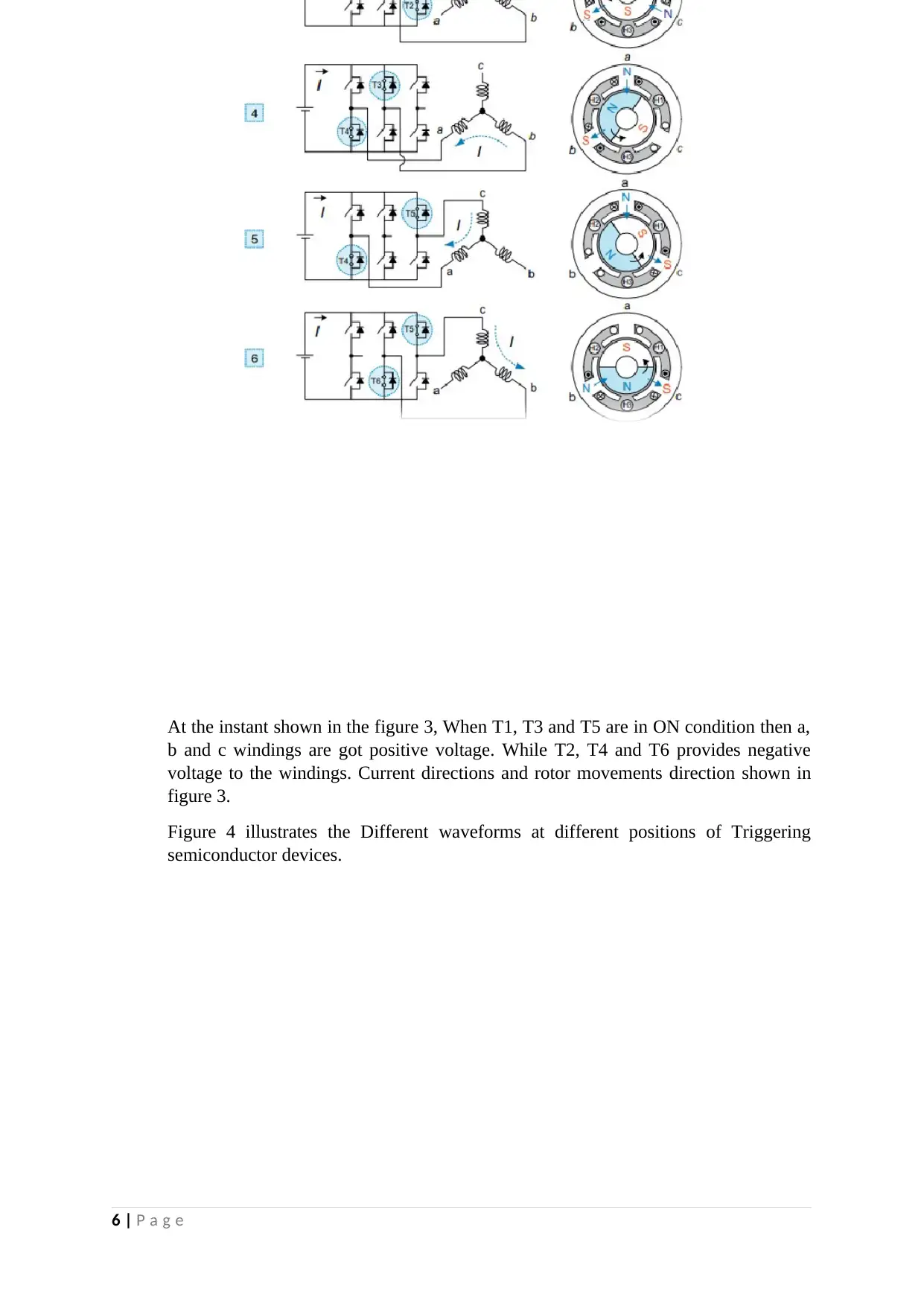
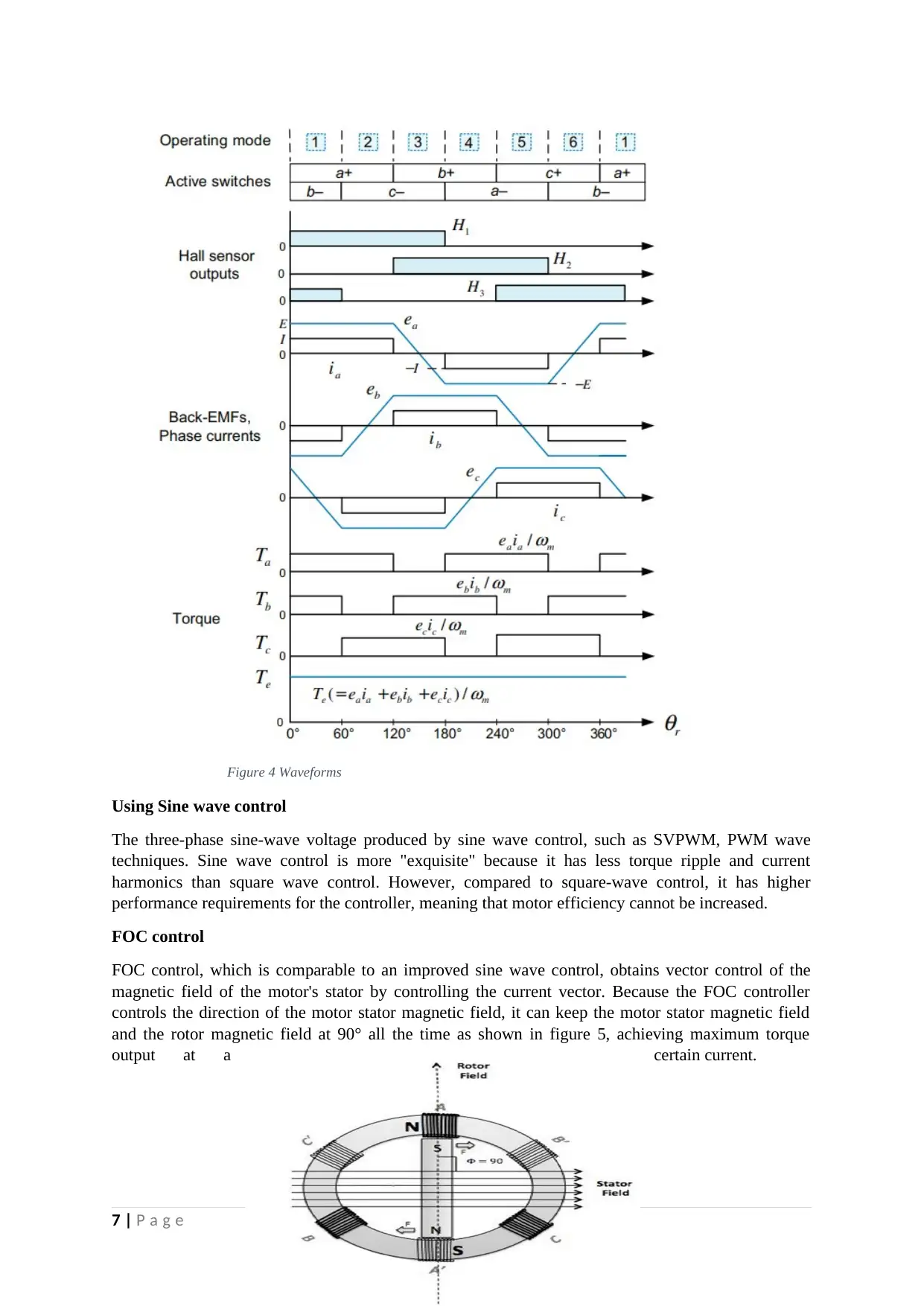
This report provides a comprehensive analysis of Brushless DC (BLDC) motors, starting with an introduction to their advantages and applications in various industries. The report delves into the construction of BLDC motors, classifying them based on stator windings and motor design, including radial and axial flux types. It explains the basic driving principles using Hall effect sensors and the switching sequences for motor control. The report further explores analytical formulas for motor performance, including steady-state calculations for parameters like EMF and torque, along with the use of Simulink for modeling and simulation of the BLDC motor. The report presents the dynamic and steady-state performance characteristics through speed curves, phase current waveforms, and torque analysis. The conclusion highlights the similarities between BLDC and PMSM motors, emphasizing the role of controllers and sensors, and validating the simulation results with calculated values under ideal conditions. References to relevant resources are also included.


1 out of 15
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.