Wind Turbine Control: PI Pole-Placement & Controller Analysis
VerifiedAdded on 2023/06/13
|10
|1052
|181
Homework Assignment
AI Summary
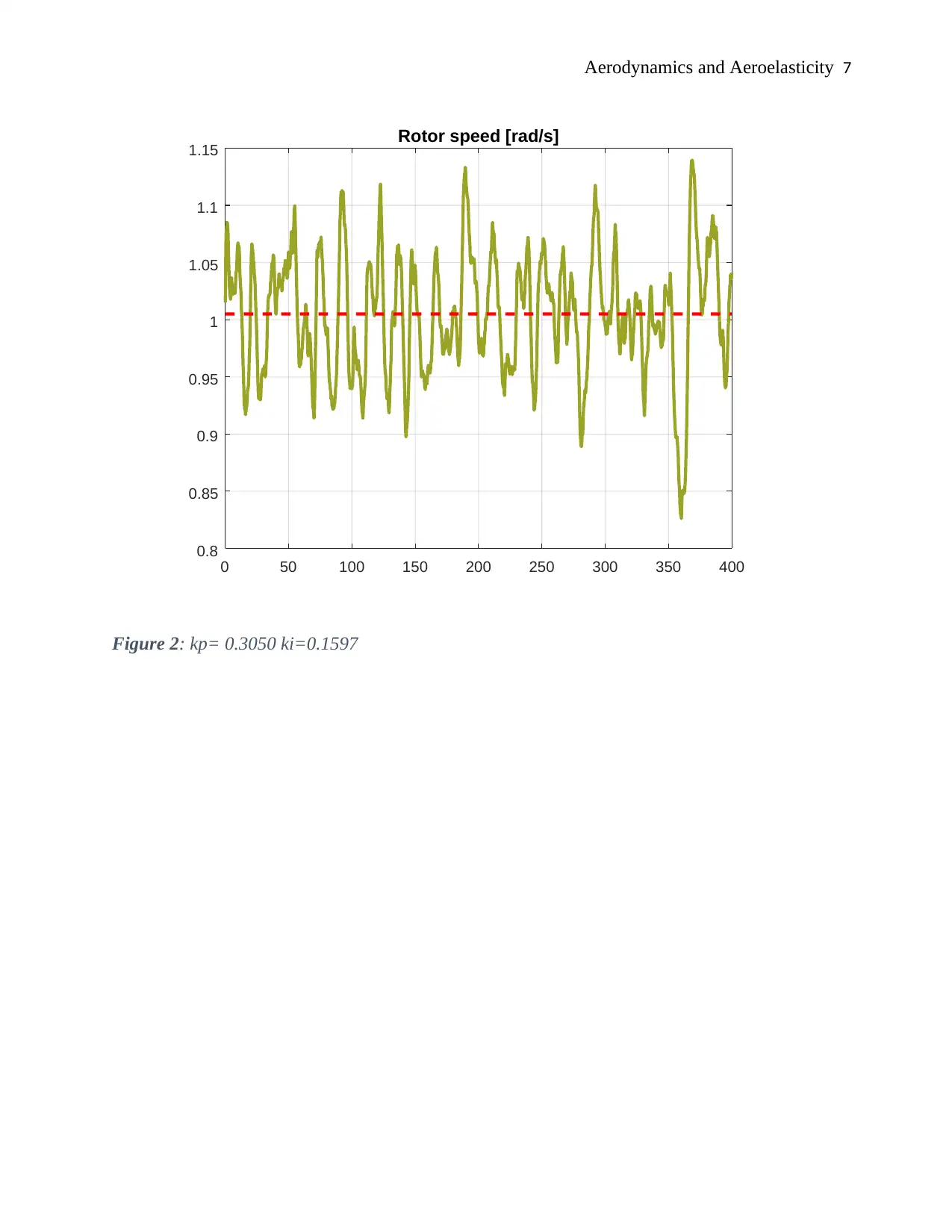
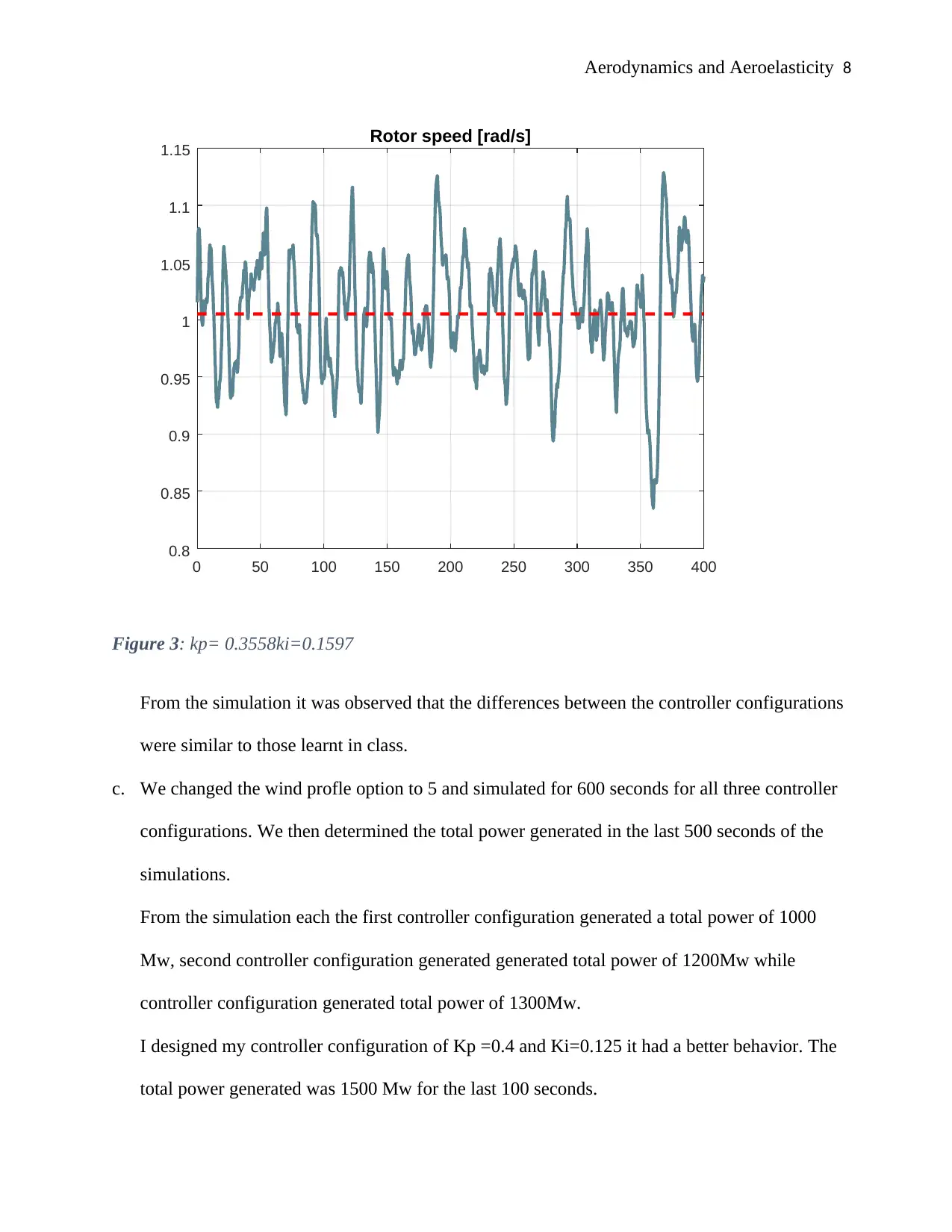
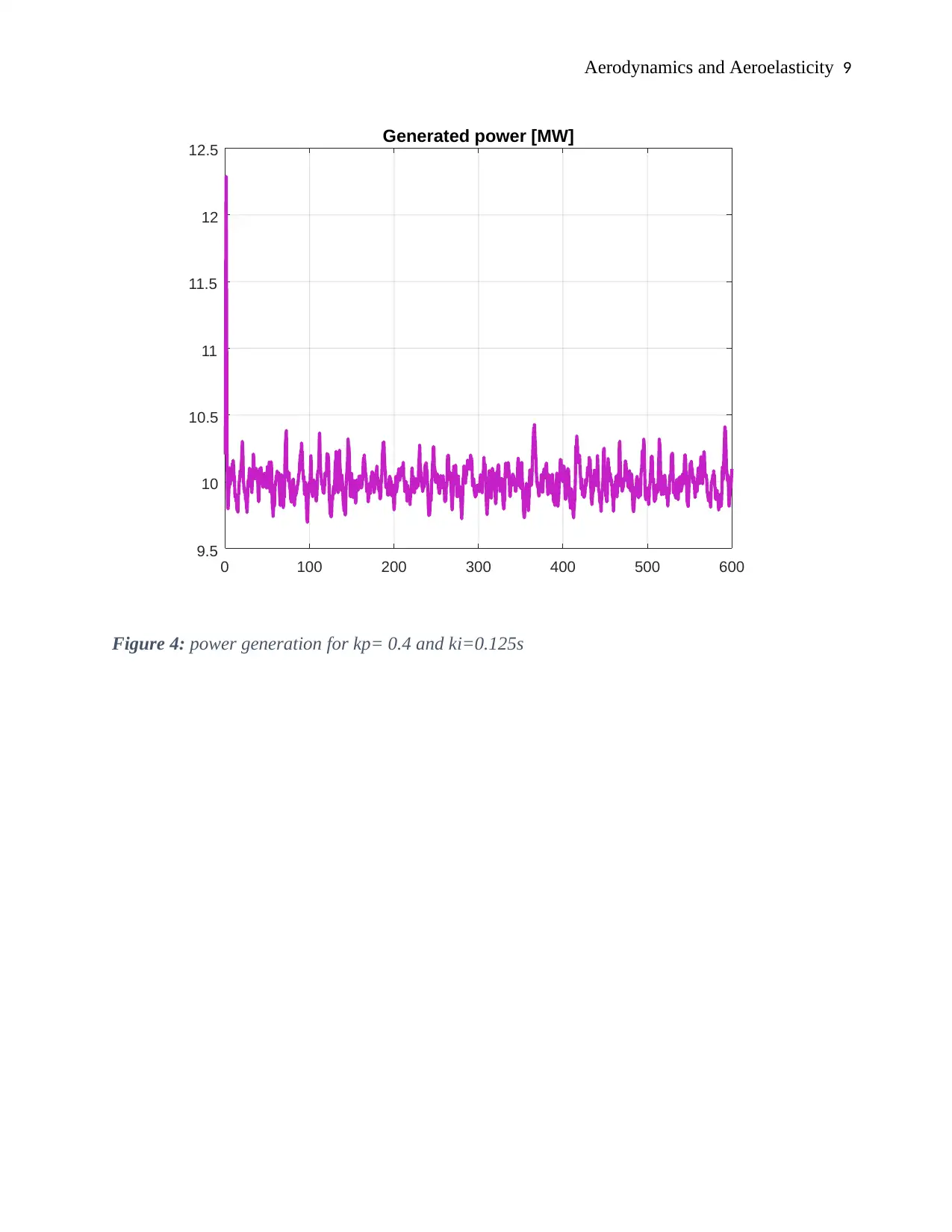
This assignment focuses on the analysis of a Region 3 pitch controller for wind turbines. It begins by deriving the PI pole-placement equations from the linearized governing equations, providing a detailed, step-by-step explanation. The assignment then explores controller performance by verifying the behavior of the Region 3 pitch controller for different values of Kp and Ki, and evaluating which values lead to the best controller performance. Simulation results are presented, comparing different controller configurations and their impact on power generation. The study also includes an analysis of the aerodynamic torque and rotational speed, demonstrating the practical application of theoretical concepts in wind turbine control.


1 out of 10
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.