Agricultural Robot Project Report: Autonomous Robot Analysis
VerifiedAdded on 2023/06/10
|22
|4822
|227
Report
AI Summary
This report presents a comprehensive analysis of an agricultural robot project, focusing on the development and application of autonomous systems in agriculture. The report begins with an executive summary and introduction, outlining the project's scope and relevance. A thorough literature review examines prior studies on autonomous agricultural robots, exploring their effectiveness, limitations, and impact on the agricultural landscape. The report then defines research questions, aims, and sub-goals, followed by a discussion of theoretical content and experimental setup, including field and lab considerations. The report also addresses potential limitations and discusses results, outcomes, and their relevance. A project planning section includes a Gantt chart illustrating the project's timeline. The study concludes with a summary of the project's findings and their implications for the future of agricultural robotics. The report references various studies and includes a basic block diagram of an agricultural robot. Finally, the report highlights the current trends and deployments of agricultural robots.

Running head: AGRICULTURAL ROBOT PROJECT
Agricultural Robot Project
Name of the student:
Name of the university:
Author Note
Agricultural Robot Project
Name of the student:
Name of the university:
Author Note
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
1AGRICULTURAL ROBOT PROJECT
Executive summary
“Agbots” or agricultural robots are used in agriculture. Whenever any farm grows in size, they are
needed to automate various kinds of implementations. These are to be used over them. In this report,
a literature review is done and different research questions are analyzed keeping “autonomous
Agricultural Robot towards robust autonomy” in mind. It also demonstrates a theoretical method and
an effective experimental setting-up along with illustrating the time schedule of the project through a
Gantt Chart. As last, the outcomes and its various importances are also analyzed here.
Executive summary
“Agbots” or agricultural robots are used in agriculture. Whenever any farm grows in size, they are
needed to automate various kinds of implementations. These are to be used over them. In this report,
a literature review is done and different research questions are analyzed keeping “autonomous
Agricultural Robot towards robust autonomy” in mind. It also demonstrates a theoretical method and
an effective experimental setting-up along with illustrating the time schedule of the project through a
Gantt Chart. As last, the outcomes and its various importances are also analyzed here.
2AGRICULTURAL ROBOT PROJECT
Table of Contents
1. Introduction:......................................................................................................................................3
2. Literature review on prior studies on autonomous agricultural robots:.............................................3
3. Research questions, aims and sub-goals:...........................................................................................8
3.1. Research questions:....................................................................................................................8
3.2. Research aims:............................................................................................................................8
3.3. Research sub-goals:....................................................................................................................9
4. Theoretical Content:..........................................................................................................................9
5. Experimental setup:.........................................................................................................................10
5.1. Discussion of field set-up and lab:............................................................................................10
5.2. Potential limitations:.................................................................................................................12
6. Results, outcomes and relevance:....................................................................................................13
7. Project planning and Gantt chart:....................................................................................................13
7. Conclusion:......................................................................................................................................17
8. References:......................................................................................................................................18
Table of Contents
1. Introduction:......................................................................................................................................3
2. Literature review on prior studies on autonomous agricultural robots:.............................................3
3. Research questions, aims and sub-goals:...........................................................................................8
3.1. Research questions:....................................................................................................................8
3.2. Research aims:............................................................................................................................8
3.3. Research sub-goals:....................................................................................................................9
4. Theoretical Content:..........................................................................................................................9
5. Experimental setup:.........................................................................................................................10
5.1. Discussion of field set-up and lab:............................................................................................10
5.2. Potential limitations:.................................................................................................................12
6. Results, outcomes and relevance:....................................................................................................13
7. Project planning and Gantt chart:....................................................................................................13
7. Conclusion:......................................................................................................................................17
8. References:......................................................................................................................................18
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
3AGRICULTURAL ROBOT PROJECT
1. Introduction:
The agricultural robots or “Agbots” are implemented for agriculture. As any farm grows in
size, they with the volume of applications used over them have been needed for ways of automating
them.
This was done manually before. Now, the tasks are performed by those autonomous
machines, as they need multiple repetitions over a large area and an extended period. The usage of
agricultural robots is designed as standard types of equipment for farms. This includes pesticide
sprayers, various combines and tractors.
The following study has conducted a literature review and analyzed various research
questions from “autonomous Agricultural Robot towards robust autonomy” from the mechanical
domain. Then the theoretical methodology and experimental set-up are demonstrated. Lastly, the
results and its relevance are discussed.
2. Literature review on prior studies on autonomous agricultural robots:
It is seen that in most of the cases, robots are ineffective at doing farming jobs. This has
commonly needed vast amounts of materials like fertilizers and seeds or is retrieved from the
harvesting field. This has been dealing with mapping and controlling precision and field for spraying
pesticides. It takes place because of low weight in comparison to a tractor that makes minor soil
compaction. Here, the degree of soil compaction is vital to consider mapping and monitoring that
which is often done numerous times in a year. Oberti et al. (2016) explains that this is because soil
compaction has been causing various issues like a decrease in denitrification and crop growth.
Agrobots have been altering the scenario of agriculture beyond identification. This is from robot-
1. Introduction:
The agricultural robots or “Agbots” are implemented for agriculture. As any farm grows in
size, they with the volume of applications used over them have been needed for ways of automating
them.
This was done manually before. Now, the tasks are performed by those autonomous
machines, as they need multiple repetitions over a large area and an extended period. The usage of
agricultural robots is designed as standard types of equipment for farms. This includes pesticide
sprayers, various combines and tractors.
The following study has conducted a literature review and analyzed various research
questions from “autonomous Agricultural Robot towards robust autonomy” from the mechanical
domain. Then the theoretical methodology and experimental set-up are demonstrated. Lastly, the
results and its relevance are discussed.
2. Literature review on prior studies on autonomous agricultural robots:
It is seen that in most of the cases, robots are ineffective at doing farming jobs. This has
commonly needed vast amounts of materials like fertilizers and seeds or is retrieved from the
harvesting field. This has been dealing with mapping and controlling precision and field for spraying
pesticides. It takes place because of low weight in comparison to a tractor that makes minor soil
compaction. Here, the degree of soil compaction is vital to consider mapping and monitoring that
which is often done numerous times in a year. Oberti et al. (2016) explains that this is because soil
compaction has been causing various issues like a decrease in denitrification and crop growth.
Agrobots have been altering the scenario of agriculture beyond identification. This is from robot-
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
4AGRICULTURAL ROBOT PROJECT
assisted milking to several types of cow-herding drones. The food industry gets revolutionised
through automation and robotics. The mechanised agriculture has to move as per strength. These are
actual issues in modern agriculture. Conventional methods of farming are to keep up the impacts
needed by the current market. The farmers in the first-world countries have been suffering from the
lack of workforce. Here, the rise of automated farming has been an attempt to resolve the issues
through advanced and robotic sensing. As per the current report, shown by Lopes et al. (2016) the
marketplace for agricultural drones and robots are intended to reach about 30 billion dollars for the
upcoming five years. Further, there are various issues in modern agriculture.
Conventional methods have been struggling with keeping up the activities needed by the
business. For example Ball et al. (2016) discussed that there is a rise in demand for nursery
automation. Organizations such as “HETO Harvest Automation and Agrotechnics” has been
delivering solutions regarding warehousing, potting and seeding living plants are greenhouses. The
autonomous precession seeding has been assimilated robotics with geomapping. The map is
generated by Bogue (2016) in his article showing soil properties like density and quality at all kinds
of points at the field. Different drone companies have been offering farmers with various combined
packages including robotic hardware and software of analysis. Farmers have been moving drones to
the pastures initiating software through smartphone or tablet and see that collected crop information
in real time. Again various ground-based robots have been supplying more detailed controlling as
they get closer to crops. Few of them have been using activities like fertilising and weeding.
assisted milking to several types of cow-herding drones. The food industry gets revolutionised
through automation and robotics. The mechanised agriculture has to move as per strength. These are
actual issues in modern agriculture. Conventional methods of farming are to keep up the impacts
needed by the current market. The farmers in the first-world countries have been suffering from the
lack of workforce. Here, the rise of automated farming has been an attempt to resolve the issues
through advanced and robotic sensing. As per the current report, shown by Lopes et al. (2016) the
marketplace for agricultural drones and robots are intended to reach about 30 billion dollars for the
upcoming five years. Further, there are various issues in modern agriculture.
Conventional methods have been struggling with keeping up the activities needed by the
business. For example Ball et al. (2016) discussed that there is a rise in demand for nursery
automation. Organizations such as “HETO Harvest Automation and Agrotechnics” has been
delivering solutions regarding warehousing, potting and seeding living plants are greenhouses. The
autonomous precession seeding has been assimilated robotics with geomapping. The map is
generated by Bogue (2016) in his article showing soil properties like density and quality at all kinds
of points at the field. Different drone companies have been offering farmers with various combined
packages including robotic hardware and software of analysis. Farmers have been moving drones to
the pastures initiating software through smartphone or tablet and see that collected crop information
in real time. Again various ground-based robots have been supplying more detailed controlling as
they get closer to crops. Few of them have been using activities like fertilising and weeding.
5AGRICULTURAL ROBOT PROJECT
ATMEGA
16
434 MHz
Receiver
Decoder
Solar
Panel
Power
Supply
Battery
Motor
Driver
(L293D)
DC Motor
Motor
Driver
(PSNF06)
DC Motor
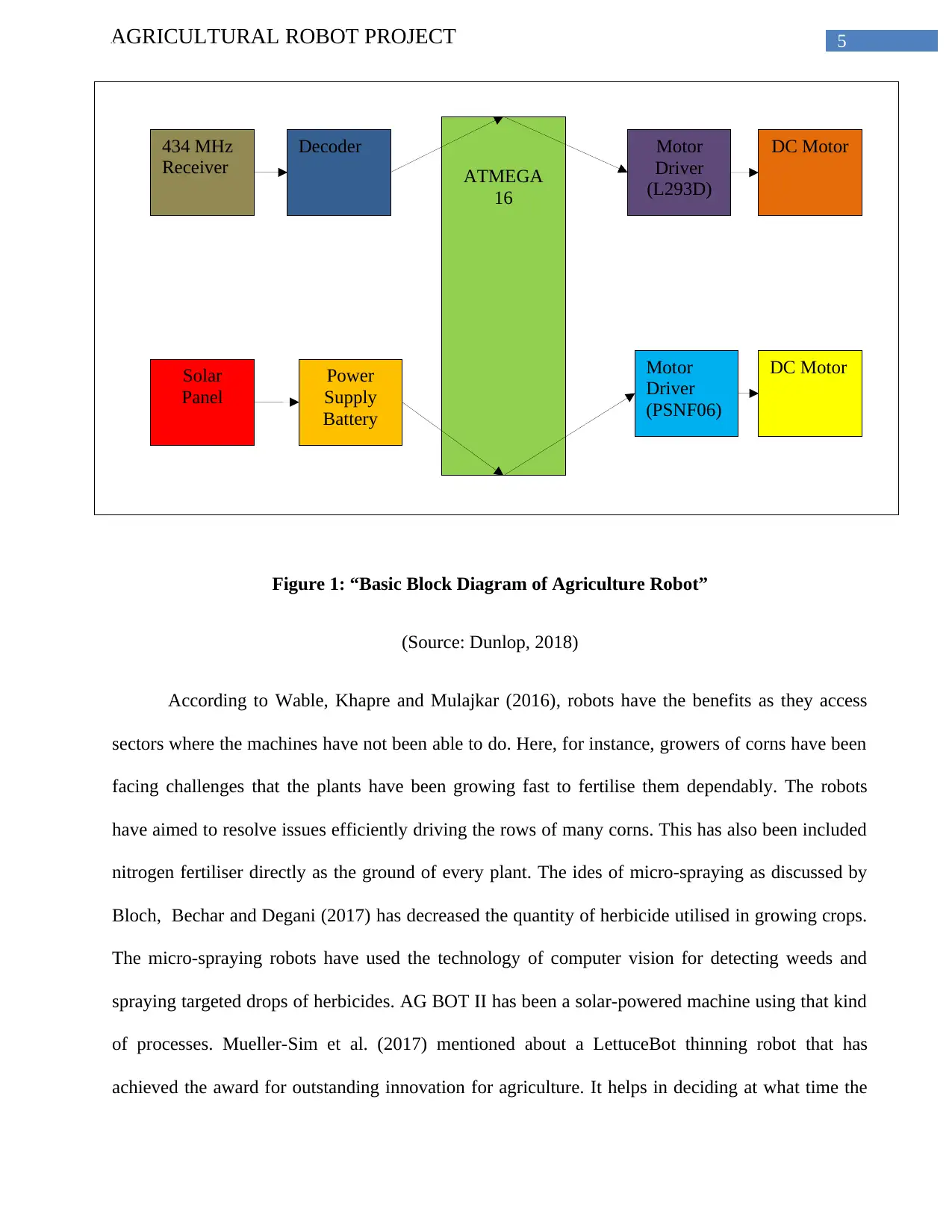
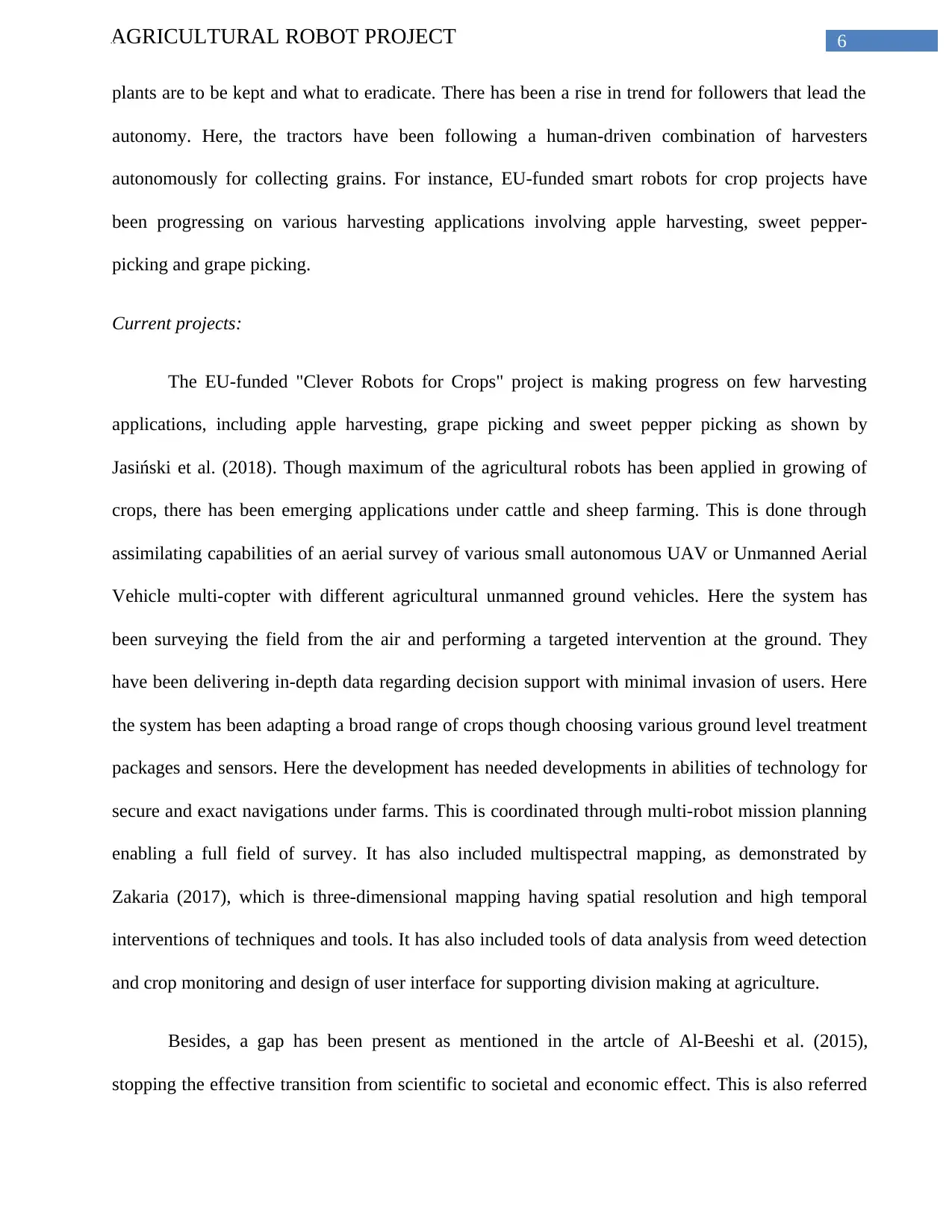
Figure 1: “Basic Block Diagram of Agriculture Robot”
(Source: Dunlop, 2018)
According to Wable, Khapre and Mulajkar (2016), robots have the benefits as they access
sectors where the machines have not been able to do. Here, for instance, growers of corns have been
facing challenges that the plants have been growing fast to fertilise them dependably. The robots
have aimed to resolve issues efficiently driving the rows of many corns. This has also been included
nitrogen fertiliser directly as the ground of every plant. The ides of micro-spraying as discussed by
Bloch, Bechar and Degani (2017) has decreased the quantity of herbicide utilised in growing crops.
The micro-spraying robots have used the technology of computer vision for detecting weeds and
spraying targeted drops of herbicides. AG BOT II has been a solar-powered machine using that kind
of processes. Mueller-Sim et al. (2017) mentioned about a LettuceBot thinning robot that has
achieved the award for outstanding innovation for agriculture. It helps in deciding at what time the
ATMEGA
16
434 MHz
Receiver
Decoder
Solar
Panel
Power
Supply
Battery
Motor
Driver
(L293D)
DC Motor
Motor
Driver
(PSNF06)
DC Motor
Figure 1: “Basic Block Diagram of Agriculture Robot”
(Source: Dunlop, 2018)
According to Wable, Khapre and Mulajkar (2016), robots have the benefits as they access
sectors where the machines have not been able to do. Here, for instance, growers of corns have been
facing challenges that the plants have been growing fast to fertilise them dependably. The robots
have aimed to resolve issues efficiently driving the rows of many corns. This has also been included
nitrogen fertiliser directly as the ground of every plant. The ides of micro-spraying as discussed by
Bloch, Bechar and Degani (2017) has decreased the quantity of herbicide utilised in growing crops.
The micro-spraying robots have used the technology of computer vision for detecting weeds and
spraying targeted drops of herbicides. AG BOT II has been a solar-powered machine using that kind
of processes. Mueller-Sim et al. (2017) mentioned about a LettuceBot thinning robot that has
achieved the award for outstanding innovation for agriculture. It helps in deciding at what time the
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
6AGRICULTURAL ROBOT PROJECT
plants are to be kept and what to eradicate. There has been a rise in trend for followers that lead the
autonomy. Here, the tractors have been following a human-driven combination of harvesters
autonomously for collecting grains. For instance, EU-funded smart robots for crop projects have
been progressing on various harvesting applications involving apple harvesting, sweet pepper-
picking and grape picking.
Current projects:
The EU-funded "Clever Robots for Crops" project is making progress on few harvesting
applications, including apple harvesting, grape picking and sweet pepper picking as shown by
Jasiński et al. (2018). Though maximum of the agricultural robots has been applied in growing of
crops, there has been emerging applications under cattle and sheep farming. This is done through
assimilating capabilities of an aerial survey of various small autonomous UAV or Unmanned Aerial
Vehicle multi-copter with different agricultural unmanned ground vehicles. Here the system has
been surveying the field from the air and performing a targeted intervention at the ground. They
have been delivering in-depth data regarding decision support with minimal invasion of users. Here
the system has been adapting a broad range of crops though choosing various ground level treatment
packages and sensors. Here the development has needed developments in abilities of technology for
secure and exact navigations under farms. This is coordinated through multi-robot mission planning
enabling a full field of survey. It has also included multispectral mapping, as demonstrated by
Zakaria (2017), which is three-dimensional mapping having spatial resolution and high temporal
interventions of techniques and tools. It has also included tools of data analysis from weed detection
and crop monitoring and design of user interface for supporting division making at agriculture.
Besides, a gap has been present as mentioned in the artcle of Al-Beeshi et al. (2015),
stopping the effective transition from scientific to societal and economic effect. This is also referred
plants are to be kept and what to eradicate. There has been a rise in trend for followers that lead the
autonomy. Here, the tractors have been following a human-driven combination of harvesters
autonomously for collecting grains. For instance, EU-funded smart robots for crop projects have
been progressing on various harvesting applications involving apple harvesting, sweet pepper-
picking and grape picking.
Current projects:
The EU-funded "Clever Robots for Crops" project is making progress on few harvesting
applications, including apple harvesting, grape picking and sweet pepper picking as shown by
Jasiński et al. (2018). Though maximum of the agricultural robots has been applied in growing of
crops, there has been emerging applications under cattle and sheep farming. This is done through
assimilating capabilities of an aerial survey of various small autonomous UAV or Unmanned Aerial
Vehicle multi-copter with different agricultural unmanned ground vehicles. Here the system has
been surveying the field from the air and performing a targeted intervention at the ground. They
have been delivering in-depth data regarding decision support with minimal invasion of users. Here
the system has been adapting a broad range of crops though choosing various ground level treatment
packages and sensors. Here the development has needed developments in abilities of technology for
secure and exact navigations under farms. This is coordinated through multi-robot mission planning
enabling a full field of survey. It has also included multispectral mapping, as demonstrated by
Zakaria (2017), which is three-dimensional mapping having spatial resolution and high temporal
interventions of techniques and tools. It has also included tools of data analysis from weed detection
and crop monitoring and design of user interface for supporting division making at agriculture.
Besides, a gap has been present as mentioned in the artcle of Al-Beeshi et al. (2015),
stopping the effective transition from scientific to societal and economic effect. This is also referred
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
7AGRICULTURAL ROBOT PROJECT
to as “Technological Innovation Gap”. EU-FP7-project-wide research is done on agricultural
robotics. Here an application has been “Sweet pepper harvesting robot”. This kind of robot has been
technically and economically viable as demonstrated by Baxter et al. (2018). The software and
hardware models proven have developed crops used as groundwork. These successful “CROPS”
software module has been from ROS or “Robotic-Operating-System” expanded and maintained at
SWEEPER. Further, the gripper and effectors have been retained. Here, the patent-pending module
has been grasping sweet pepper instead of any necessity of proper measurement of orientation and
position of fruits. At SWEEPER, the system of cropping is intended to optimise for facilitating
harvesting of robots. It was concluded at CROPS that instead of any 9DOF, one 4DOF arm has been
enough to decrease the expenses. As per Ulbrich et al. (2015), for developing abilities level of
abilities regarding cognitive capabilities, the plant models would be deployed for proper location of
sweet peppers. Here, the model-based vision has been increasing and quickening up detection of
fruits. Based on various insights of CROPS, the sensors have been placed only over the gripper.
Further, LightField sensor has been introduced that has been able o record colour and 3D
information at the same time.
Factoids to be considered for the research:
It is seen that most of the conglomerates of US farming have been buying various foreign
areas and starting a farm there through citing the overall lesser expenses. For instance, Robert (2017)
investigated that China has been buying land at Africa and sending expert workers for supervising
those farms. International ranchers and farmers have been transitioning to precision methods of
agriculture. This has indicated the dividing the acreage into various sub-plots, in multiple cases,
proper down to distinct flora and fauna has been helping to the rise the productivity and decreasing
entire costs. Different unmanned aerial vehicles can be utilised for spraying, sensing observing and
to as “Technological Innovation Gap”. EU-FP7-project-wide research is done on agricultural
robotics. Here an application has been “Sweet pepper harvesting robot”. This kind of robot has been
technically and economically viable as demonstrated by Baxter et al. (2018). The software and
hardware models proven have developed crops used as groundwork. These successful “CROPS”
software module has been from ROS or “Robotic-Operating-System” expanded and maintained at
SWEEPER. Further, the gripper and effectors have been retained. Here, the patent-pending module
has been grasping sweet pepper instead of any necessity of proper measurement of orientation and
position of fruits. At SWEEPER, the system of cropping is intended to optimise for facilitating
harvesting of robots. It was concluded at CROPS that instead of any 9DOF, one 4DOF arm has been
enough to decrease the expenses. As per Ulbrich et al. (2015), for developing abilities level of
abilities regarding cognitive capabilities, the plant models would be deployed for proper location of
sweet peppers. Here, the model-based vision has been increasing and quickening up detection of
fruits. Based on various insights of CROPS, the sensors have been placed only over the gripper.
Further, LightField sensor has been introduced that has been able o record colour and 3D
information at the same time.
Factoids to be considered for the research:
It is seen that most of the conglomerates of US farming have been buying various foreign
areas and starting a farm there through citing the overall lesser expenses. For instance, Robert (2017)
investigated that China has been buying land at Africa and sending expert workers for supervising
those farms. International ranchers and farmers have been transitioning to precision methods of
agriculture. This has indicated the dividing the acreage into various sub-plots, in multiple cases,
proper down to distinct flora and fauna has been helping to the rise the productivity and decreasing
entire costs. Different unmanned aerial vehicles can be utilised for spraying, sensing observing and
8AGRICULTURAL ROBOT PROJECT
mapping. Autonomous or unmanned ground vehicles have been supplying more precise movements
and thus helping with precision practices. It is seen from the article of Baxter et al. (2018), the report
of US Bureau of Labor Statistics that 2012 median pay for the farm workers have been about 9
dollars. On the other hand the reports from US Bureau of Labor Statistics that has been about
750,000 agricultural workers in 2012 that has been down about 3% from 2011. The approximate
number of crop workers has been 74% in US-born in Central America and Mexico where more than
half has been still kept undocumented as per Fortune Magazine. Furthermore, Durmuş et al. (2015)
analyzed that Cropdusters has been possessing 3rd largest fatality rate taking place among
professionals at the U.S. Here, 90% of crop saying at Japan has been done through different
unmanned helicopters. Again, ResearchMoz has projected that the size of agricultural marker would
get increased from about 817 million dollars to about 16 billion dollars from 2013, till the end of
2020 as shown by Wable, Khapre and Mulajkar (2016).
3. Research questions, aims and sub-goals:
3.1. Research questions:
What is the status of present trends and deployments of free and agricultural patterns?
What is the potential of future applications for autonomous agricultural robots?
How are these autonomous vehicles different from those of conventional ones?
What are the field operations for crop establishments, plant cares and selective harvestings?
3.2. Research aims:
The various purposes include the following. Example of this includes driving in top rows for
a maximum of 30 seconds. Further, the robot has been continuing with operation with the fault of
mapping. Autonomous or unmanned ground vehicles have been supplying more precise movements
and thus helping with precision practices. It is seen from the article of Baxter et al. (2018), the report
of US Bureau of Labor Statistics that 2012 median pay for the farm workers have been about 9
dollars. On the other hand the reports from US Bureau of Labor Statistics that has been about
750,000 agricultural workers in 2012 that has been down about 3% from 2011. The approximate
number of crop workers has been 74% in US-born in Central America and Mexico where more than
half has been still kept undocumented as per Fortune Magazine. Furthermore, Durmuş et al. (2015)
analyzed that Cropdusters has been possessing 3rd largest fatality rate taking place among
professionals at the U.S. Here, 90% of crop saying at Japan has been done through different
unmanned helicopters. Again, ResearchMoz has projected that the size of agricultural marker would
get increased from about 817 million dollars to about 16 billion dollars from 2013, till the end of
2020 as shown by Wable, Khapre and Mulajkar (2016).
3. Research questions, aims and sub-goals:
3.1. Research questions:
What is the status of present trends and deployments of free and agricultural patterns?
What is the potential of future applications for autonomous agricultural robots?
How are these autonomous vehicles different from those of conventional ones?
What are the field operations for crop establishments, plant cares and selective harvestings?
3.2. Research aims:
The various purposes include the following. Example of this includes driving in top rows for
a maximum of 30 seconds. Further, the robot has been continuing with operation with the fault of
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
9AGRICULTURAL ROBOT PROJECT
sensor and actuator. Also, operating under faulty and normal activities has been highly dangerous for
the environment.
3.3. Research sub-goals:
The sub-goals of robots in agriculture have been immense. The robots were appearing at
farms in different guises and rise in numbers. The various issues related to free farm tools have been
overcoming the tools. The device would turn out to be the future, and there have been essential
causes to think that it has not been replacing the human driver with computers. This has indicated
rethinking of how the product can be done. The production of crops has been cheaper and better with
a swarm of few machines than various large ones.
4. Theoretical Content:
The agriculture industry has been under transition. The transition has been differing as per
the country, states, and regions and practiced by farming. This has taken place from primitive o
traditional and from precession to experimental. This little bit of everything has been going on at
every position. However, any general trend worldwide has been towards the precision agriculture
that has been supplemented though developed technologies that have included robotics (Wang et al.
2016).
Various factors have been precipitating within those changes apart from an international
growth of populations and availability and cost of the labor. This has included a decrease in
availability and rise in an expense of water, political and processes that are regulatory. It has also
included restricted tillable acreages, cheaper, better and quicker technological automation resources
and changes in climate (Duarte et al. 2016). Current ranchers and farmers have been highly
technical. Different digitally controlled farm deployments have been in use regularly.
sensor and actuator. Also, operating under faulty and normal activities has been highly dangerous for
the environment.
3.3. Research sub-goals:
The sub-goals of robots in agriculture have been immense. The robots were appearing at
farms in different guises and rise in numbers. The various issues related to free farm tools have been
overcoming the tools. The device would turn out to be the future, and there have been essential
causes to think that it has not been replacing the human driver with computers. This has indicated
rethinking of how the product can be done. The production of crops has been cheaper and better with
a swarm of few machines than various large ones.
4. Theoretical Content:
The agriculture industry has been under transition. The transition has been differing as per
the country, states, and regions and practiced by farming. This has taken place from primitive o
traditional and from precession to experimental. This little bit of everything has been going on at
every position. However, any general trend worldwide has been towards the precision agriculture
that has been supplemented though developed technologies that have included robotics (Wang et al.
2016).
Various factors have been precipitating within those changes apart from an international
growth of populations and availability and cost of the labor. This has included a decrease in
availability and rise in an expense of water, political and processes that are regulatory. It has also
included restricted tillable acreages, cheaper, better and quicker technological automation resources
and changes in climate (Duarte et al. 2016). Current ranchers and farmers have been highly
technical. Different digitally controlled farm deployments have been in use regularly.
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
10AGRICULTURAL ROBOT PROJECT
There have been numerous automatic devices present for various elements of functions
related to agriculture. This has extended from grafting to planting. This has included packaging to
boxing, harvesting to sorting. The farmers can use software systems and various maps of aerial
surveys and information for guiding the field operations (Serrano et al. 2017). Moreover, they have
been using auto-steer systems including different new tractors following GPS and guidance of
software. Besides, many farmers have been transitioning few operations to total autonomy. In this
way, forward-thinking owners for farms of the current age has been able o skip the over slow with
various developed improvements and then directly jump to autonomous and robotic automation
(Jasiński et al. 2018).
5. Experimental setup:
5.1. Discussion of field set-up and lab:
Fault analysis is to be performed with severity analysis of every wheel, proximity sensor and
inclinometer faults. Next, a non-linear model is to be implemented and designed from FDI method
or Fault Detection and Isolation method (Grimstad and From 2017). Next, the critical errors are to be
verified. For complementing that linear method two more new ways for FDI have been examined,
that has been resulting in various objectives. The first one is to implement and design non-linear FDI
method. Further, the practical goals have included extra software and hardware (Radkowski 2018).
Next, an implementation and designing of proximity sensors are to be implemented on that API.
After this, a space inclinometer has been performed and designed for providing rolling and pitching
measurements. Lastly, implementing and developing of relays are included for disconnecting distinct
wheels.
There have been numerous automatic devices present for various elements of functions
related to agriculture. This has extended from grafting to planting. This has included packaging to
boxing, harvesting to sorting. The farmers can use software systems and various maps of aerial
surveys and information for guiding the field operations (Serrano et al. 2017). Moreover, they have
been using auto-steer systems including different new tractors following GPS and guidance of
software. Besides, many farmers have been transitioning few operations to total autonomy. In this
way, forward-thinking owners for farms of the current age has been able o skip the over slow with
various developed improvements and then directly jump to autonomous and robotic automation
(Jasiński et al. 2018).
5. Experimental setup:
5.1. Discussion of field set-up and lab:
Fault analysis is to be performed with severity analysis of every wheel, proximity sensor and
inclinometer faults. Next, a non-linear model is to be implemented and designed from FDI method
or Fault Detection and Isolation method (Grimstad and From 2017). Next, the critical errors are to be
verified. For complementing that linear method two more new ways for FDI have been examined,
that has been resulting in various objectives. The first one is to implement and design non-linear FDI
method. Further, the practical goals have included extra software and hardware (Radkowski 2018).
Next, an implementation and designing of proximity sensors are to be implemented on that API.
After this, a space inclinometer has been performed and designed for providing rolling and pitching
measurements. Lastly, implementing and developing of relays are included for disconnecting distinct
wheels.
11AGRICULTURAL ROBOT PROJECT
Sensors and inputs Sate 1: Kalman Filter
State 2: Kalman Filter
State n Kalman Filter
Sate Observer
Discrete
Sate
Estimate q
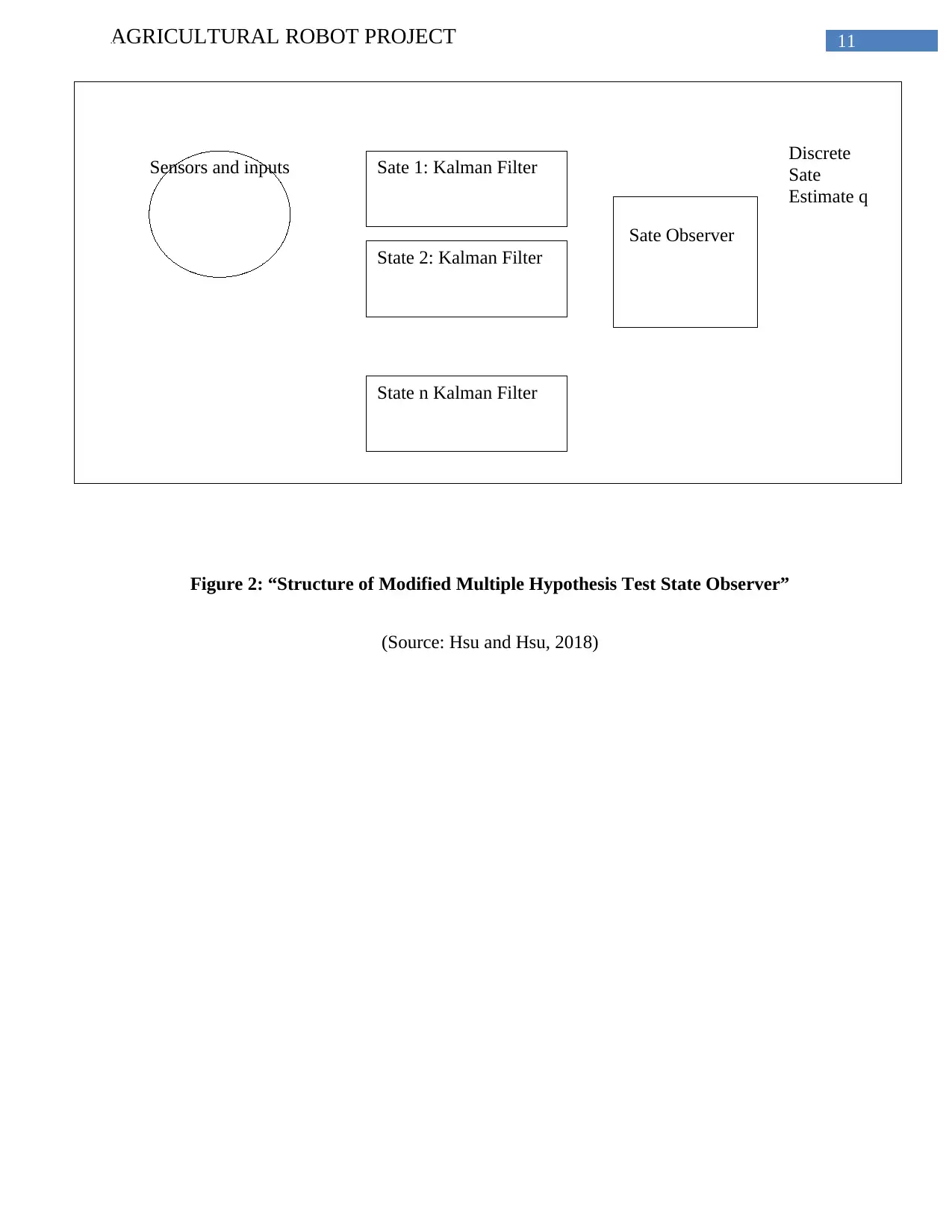
Figure 2: “Structure of Modified Multiple Hypothesis Test State Observer”
(Source: Hsu and Hsu, 2018)
Sensors and inputs Sate 1: Kalman Filter
State 2: Kalman Filter
State n Kalman Filter
Sate Observer
Discrete
Sate
Estimate q
Figure 2: “Structure of Modified Multiple Hypothesis Test State Observer”
(Source: Hsu and Hsu, 2018)
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
1 out of 22
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
Copyright © 2020–2025 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.