3D Kinematic and Kinetic Analysis: Obstacle Crossing Lab Report
VerifiedAdded on 2023/01/18
|9
|2207
|20
Report
AI Summary
This laboratory report presents an analysis of human gait during obstacle crossing, focusing on 3D kinematic and kinetic characteristics. The study utilizes data from the OPTOTRAK 3D movement analysis system and AMTI force plates to examine stride length, stance and swing phases, and obstacle clearance. The report investigates the impact of low and high obstacles on walking patterns, comparing the kinematic and kinetic variables between unobstructed walking and obstacle crossing scenarios. The results reveal how obstacle height affects braking and propulsive forces, as well as vertical and heel/toe velocities. The findings highlight the adaptation of gait to different obstacle conditions, emphasizing the importance of motor coordination and balance control. The study contributes to understanding how individuals adjust their movements to navigate obstacles, with implications for sports performance and clinical applications. The report also explores differences in force generation between the lead and trail legs, and alterations in temporal, force, and impulse characteristics in the vertical and anteroposterior directions. The conclusion emphasizes the strategic movement control during obstacle crossing in healthy subjects and its potential use in examining individuals with physical impairments.
AHE3103 Advanced Biomechanics
3D Kinematic and kinetic characteristics of obstacle crossing Laboratory
Report
Michelle Wilson- S4495991
Introduction
Gait analysis entails study of human motion, which is used to assess, plan and treat
individuals with conditions affecting their ability to walk (Acton, 2012). This study
has become beneficial, in recent, in the sports industry where biomechanics has been
used to help sportsmen improve their efficiency and performance in this field. So
compounded with the importance associated with biomechanics in the wellbeing of
human beings, interest has increased in knowing what gait analysis involves.
In this report more details in movements of a person which is recorded by the
OPTOTRAK 3D movement analysis system device will be studied. In addition, time
synchronized with two AMTI force sample at high frequency of 1000 Hz. The factors
that were determined include stride length, duration, stance and swing phase, obstacle
clearance, obstacle clearance and obstacle crossing distance, and time in terms of
percentages. In the study, qualitative and quantitative analysis methods were used
with the aim of determining information concerning the kinematic and kinetic
characteristics of walking during obstacle crossing. The hypotheses of this study
include; constraints of stepping over obstacles imposed different kinetic demands on
the both left and right feet usually reflected in braking and propulsive forces, and
vertical and heel and toe velocity show a relationship to variations in trajectory caused
by stepping over low and high obstacles (Pamela K Levangie, 2011).
Objective
The objective of this report is to analyse what effects, high and low obstacles have on
an individual’s walking technique as compared to unobstructed walking, showing
kinematic and kinetic similarities and contrasts between the two.
Method
The experiment involved one person taking part in practical exercises using the
various procedural steps such as normal walking, low and high obstacle waking.
The experiment was done and the data was taken randomly and recorded. Different
coloured markings were used to paint the participant’s toes and heels of both feet and
knee facing the cameras. The markings were placed just outside of the foot nearest to
the camera and also the inside of the contralateral foot.
3D Kinematic and kinetic characteristics of obstacle crossing Laboratory
Report
Michelle Wilson- S4495991
Introduction
Gait analysis entails study of human motion, which is used to assess, plan and treat
individuals with conditions affecting their ability to walk (Acton, 2012). This study
has become beneficial, in recent, in the sports industry where biomechanics has been
used to help sportsmen improve their efficiency and performance in this field. So
compounded with the importance associated with biomechanics in the wellbeing of
human beings, interest has increased in knowing what gait analysis involves.
In this report more details in movements of a person which is recorded by the
OPTOTRAK 3D movement analysis system device will be studied. In addition, time
synchronized with two AMTI force sample at high frequency of 1000 Hz. The factors
that were determined include stride length, duration, stance and swing phase, obstacle
clearance, obstacle clearance and obstacle crossing distance, and time in terms of
percentages. In the study, qualitative and quantitative analysis methods were used
with the aim of determining information concerning the kinematic and kinetic
characteristics of walking during obstacle crossing. The hypotheses of this study
include; constraints of stepping over obstacles imposed different kinetic demands on
the both left and right feet usually reflected in braking and propulsive forces, and
vertical and heel and toe velocity show a relationship to variations in trajectory caused
by stepping over low and high obstacles (Pamela K Levangie, 2011).
Objective
The objective of this report is to analyse what effects, high and low obstacles have on
an individual’s walking technique as compared to unobstructed walking, showing
kinematic and kinetic similarities and contrasts between the two.
Method
The experiment involved one person taking part in practical exercises using the
various procedural steps such as normal walking, low and high obstacle waking.
The experiment was done and the data was taken randomly and recorded. Different
coloured markings were used to paint the participant’s toes and heels of both feet and
knee facing the cameras. The markings were placed just outside of the foot nearest to
the camera and also the inside of the contralateral foot.
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
The participant’s weight was also weighed and recorded on the results paper. This
was done for the purposes of getting accurate data from the experiment.
Cameras were set up in various and strategic positions in order to get accurate data
which will in turn give us accurate information and thus better assessment. It was
ensured that the background was clear thus allowing participant to be viewed and in
addition cameras were in their positions such that images taken were horizontal
without slope. This minimised error in the final results.
The devices employed for the whole study included video camera and tripod, Tape for
marking joint centres and locations, Tape measure, obstacles and many others.
The experiment started by attaching the IREDs properly. The person undergoing the
experiment or ‘specimen’ as was casually referred to was positioned in the area of the
OPTOTRAK in order to detect all positions of the IREDs. Data was then collected
and recorded as shown in the results section. After the experiment was over the data
collected was transferred to the excel sheet and analysis of kinetic and kinematic
correlation was done (HIBBELER, 2016).
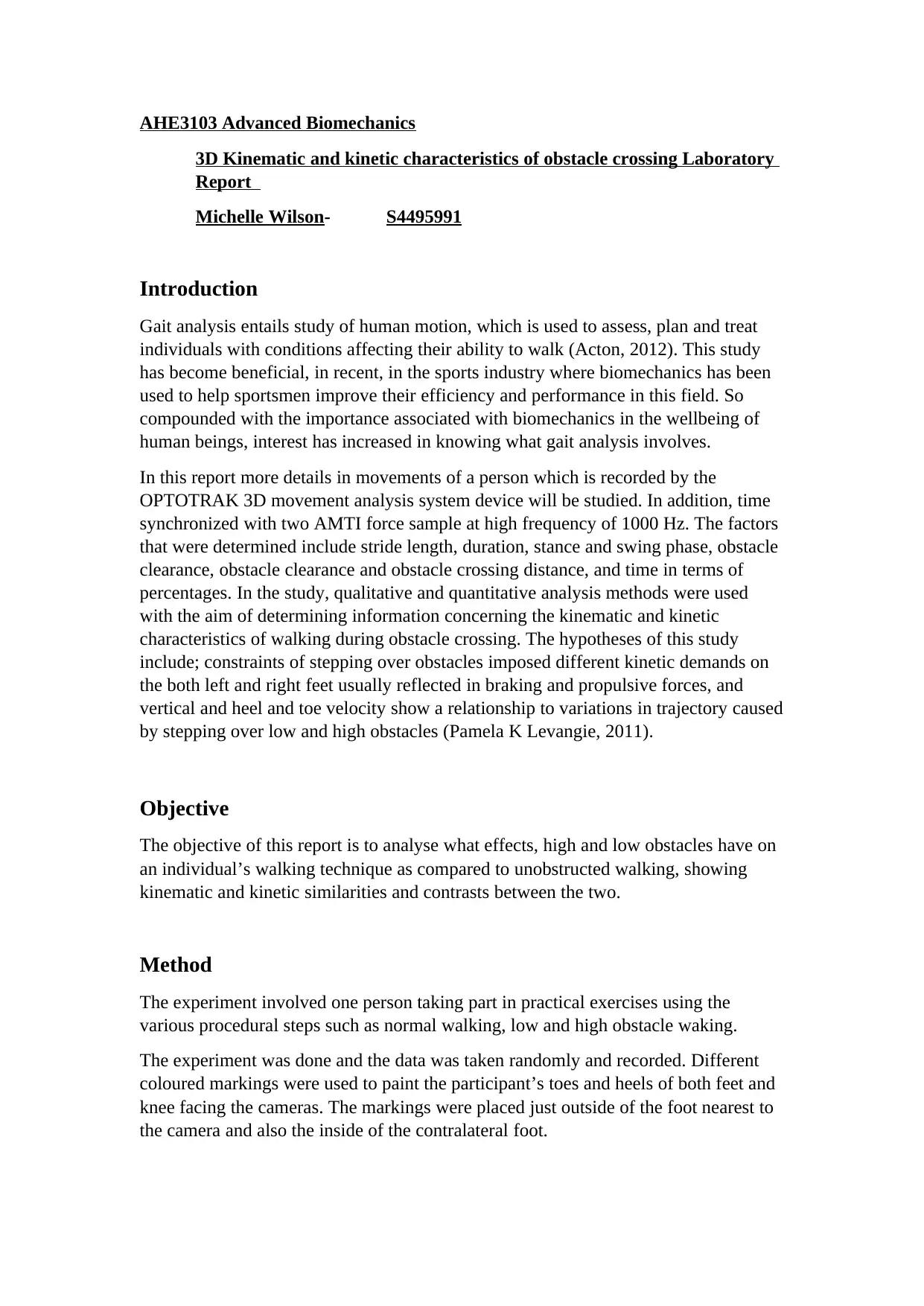
Results
Figure 2. Kinematic graph right foot normal walking.
-1500 -1000 -500 0 500 1000 1500 2000
0
50
100
150
200
250
300
350
Kinematics of Right Foot During Normal Walking (No
Obstacle)
verticle
displacement
Horizontal
displacem
ent
was done for the purposes of getting accurate data from the experiment.
Cameras were set up in various and strategic positions in order to get accurate data
which will in turn give us accurate information and thus better assessment. It was
ensured that the background was clear thus allowing participant to be viewed and in
addition cameras were in their positions such that images taken were horizontal
without slope. This minimised error in the final results.
The devices employed for the whole study included video camera and tripod, Tape for
marking joint centres and locations, Tape measure, obstacles and many others.
The experiment started by attaching the IREDs properly. The person undergoing the
experiment or ‘specimen’ as was casually referred to was positioned in the area of the
OPTOTRAK in order to detect all positions of the IREDs. Data was then collected
and recorded as shown in the results section. After the experiment was over the data
collected was transferred to the excel sheet and analysis of kinetic and kinematic
correlation was done (HIBBELER, 2016).
Results
Figure 2. Kinematic graph right foot normal walking.
-1500 -1000 -500 0 500 1000 1500 2000
0
50
100
150
200
250
300
350
Kinematics of Right Foot During Normal Walking (No
Obstacle)
verticle
displacement
Horizontal
displacem
ent
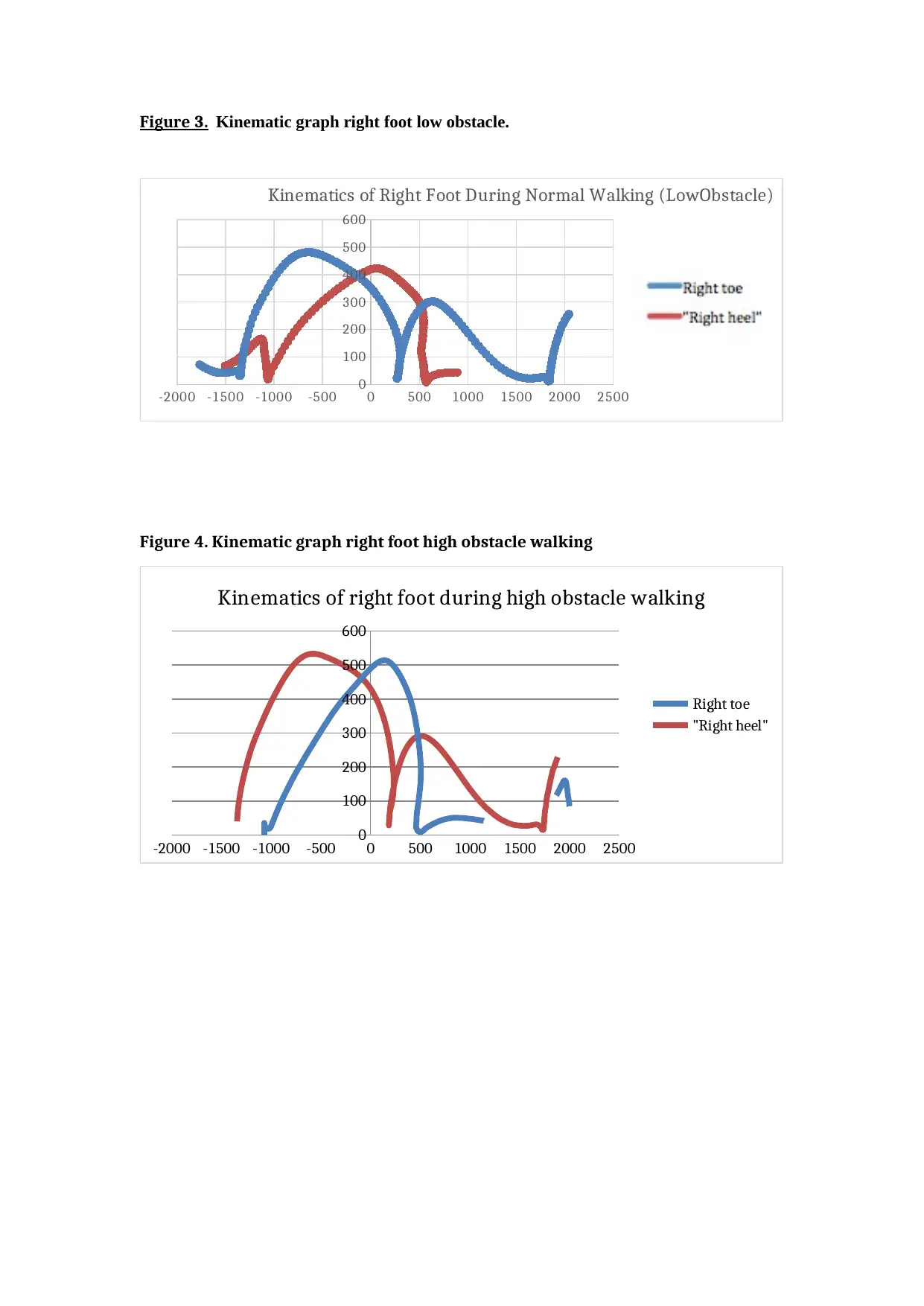
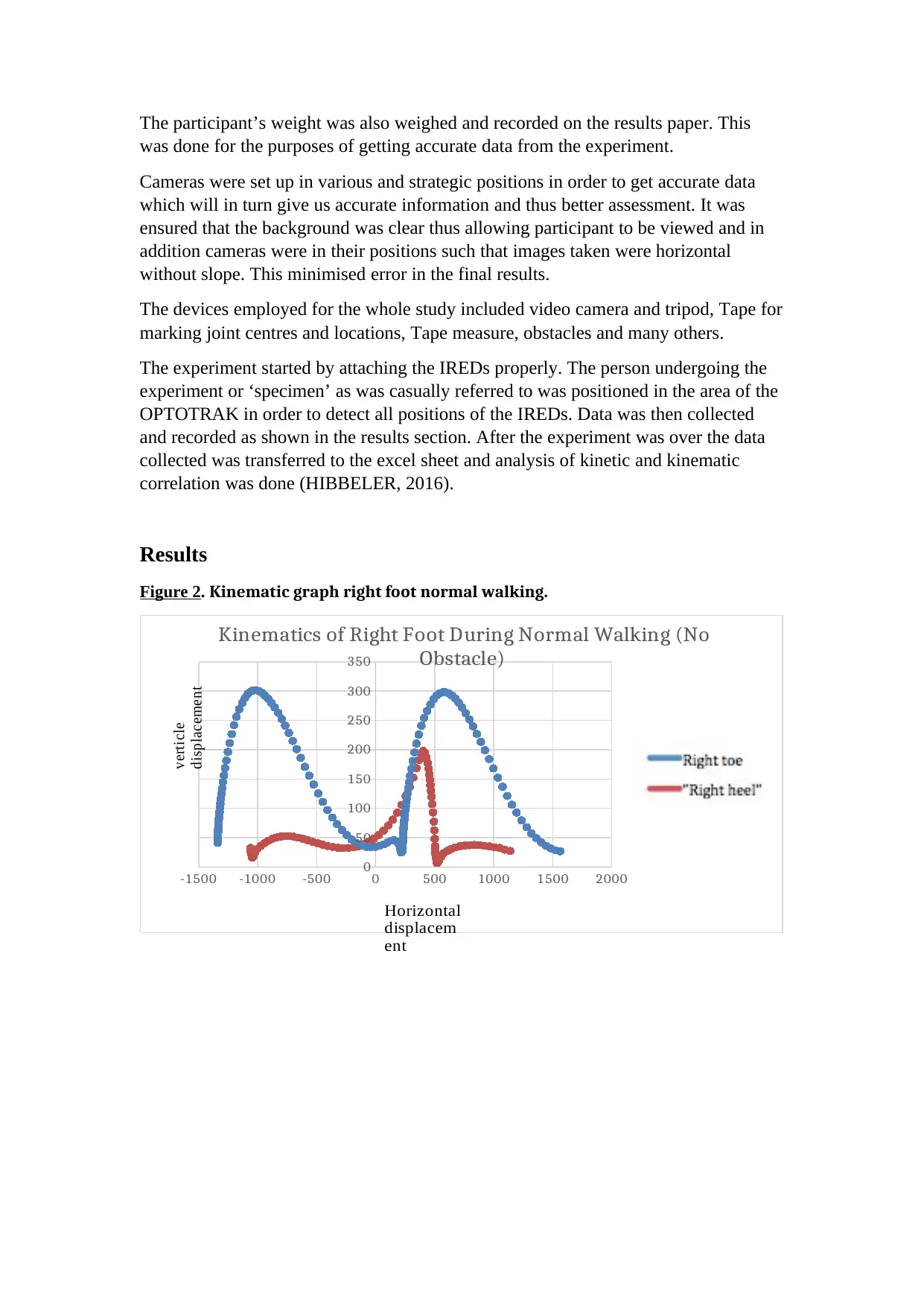
Figure 3. Kinematic graph right foot low obstacle.
-2000 -1500 -1000 -500 0 500 1000 1500 2000 2500
0
100
200
300
400
500
600
Kinematics of Right Foot During Normal Walking (LowObstacle)
Figure 4. Kinematic graph right foot high obstacle walking
-2000 -1500 -1000 -500 0 500 1000 1500 2000 2500
0
100
200
300
400
500
600
Kinematics of right foot during high obstacle walking
Right toe
"Right heel"
-2000 -1500 -1000 -500 0 500 1000 1500 2000 2500
0
100
200
300
400
500
600
Kinematics of Right Foot During Normal Walking (LowObstacle)
Figure 4. Kinematic graph right foot high obstacle walking
-2000 -1500 -1000 -500 0 500 1000 1500 2000 2500
0
100
200
300
400
500
600
Kinematics of right foot during high obstacle walking
Right toe
"Right heel"
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
Table 1. Gait and Obstacle Crossing variables between normal walking, Low
obstacle and high obstacle crossing. (HC= heel contact)
obstacle and high obstacle crossing. (HC= heel contact)
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
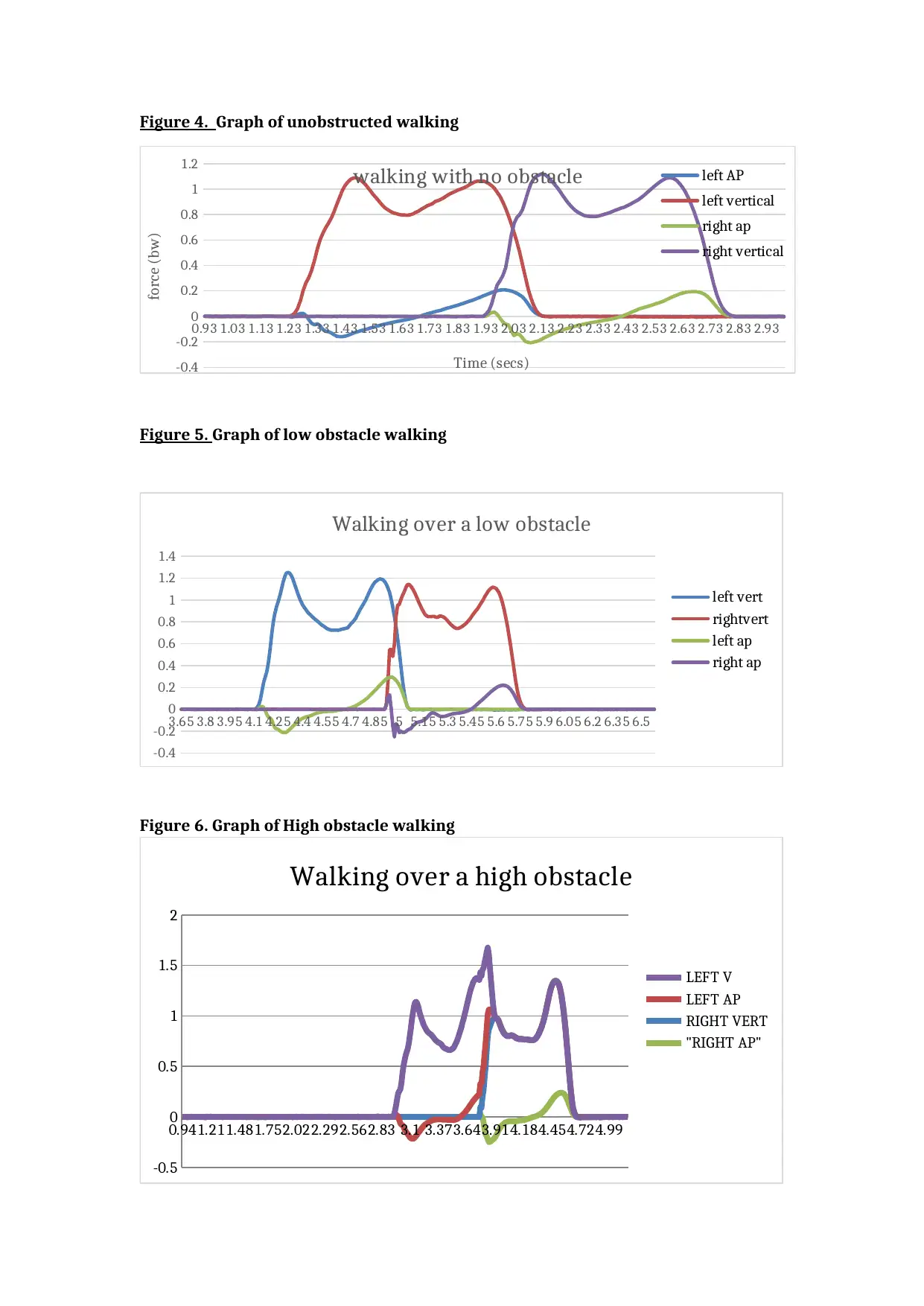
Figure 4. Graph of unobstructed walking
0.93 1.03 1.13 1.23 1.33 1.43 1.53 1.63 1.73 1.83 1.93 2.03 2.13 2.23 2.33 2.43 2.53 2.63 2.73 2.83 2.93
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
walking with no obstacle left AP
left vertical
right ap
right vertical
Time (secs)
force (bw)
Figure 5. Graph of low obstacle walking
3.65 3.8 3.95 4.1 4.25 4.4 4.55 4.7 4.85 5 5.15 5.3 5.45 5.6 5.75 5.9 6.05 6.2 6.35 6.5
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Walking over a low obstacle
left vert
rightvert
left ap
right ap
Figure 6. Graph of High obstacle walking
0.941.211.481.752.022.292.562.83 3.1 3.373.643.914.184.454.724.99
-0.5
0
0.5
1
1.5
2
Walking over a high obstacle
LEFT V
LEFT AP
RIGHT VERT
"RIGHT AP"
0.93 1.03 1.13 1.23 1.33 1.43 1.53 1.63 1.73 1.83 1.93 2.03 2.13 2.23 2.33 2.43 2.53 2.63 2.73 2.83 2.93
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
walking with no obstacle left AP
left vertical
right ap
right vertical
Time (secs)
force (bw)
Figure 5. Graph of low obstacle walking
3.65 3.8 3.95 4.1 4.25 4.4 4.55 4.7 4.85 5 5.15 5.3 5.45 5.6 5.75 5.9 6.05 6.2 6.35 6.5
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Walking over a low obstacle
left vert
rightvert
left ap
right ap
Figure 6. Graph of High obstacle walking
0.941.211.481.752.022.292.562.83 3.1 3.373.643.914.184.454.724.99
-0.5
0
0.5
1
1.5
2
Walking over a high obstacle
LEFT V
LEFT AP
RIGHT VERT
"RIGHT AP"
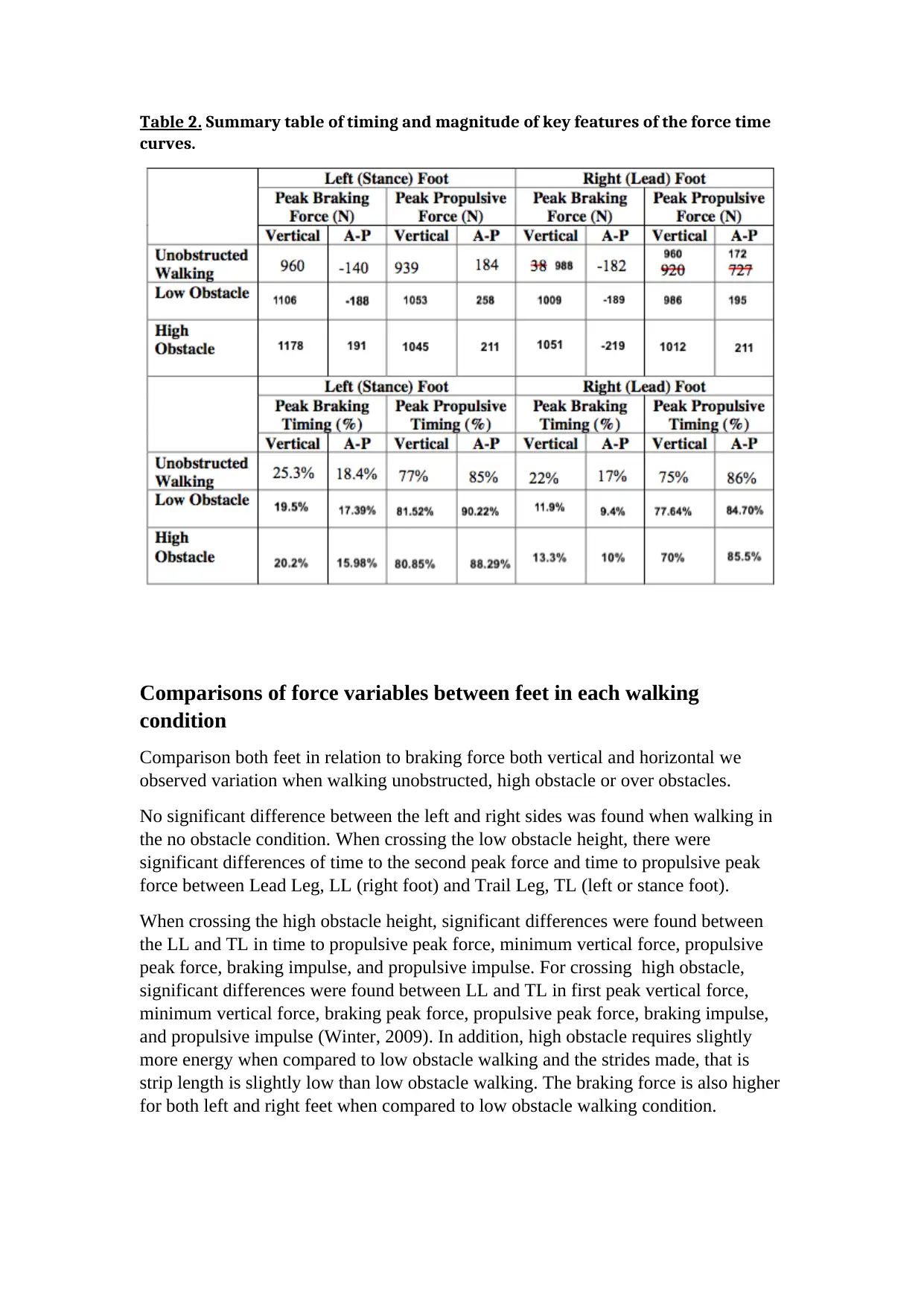
Table 2. Summary table of timing and magnitude of key features of the force time
curves.
Comparisons of force variables between feet in each walking
condition
Comparison both feet in relation to braking force both vertical and horizontal we
observed variation when walking unobstructed, high obstacle or over obstacles.
No significant difference between the left and right sides was found when walking in
the no obstacle condition. When crossing the low obstacle height, there were
significant differences of time to the second peak force and time to propulsive peak
force between Lead Leg, LL (right foot) and Trail Leg, TL (left or stance foot).
When crossing the high obstacle height, significant differences were found between
the LL and TL in time to propulsive peak force, minimum vertical force, propulsive
peak force, braking impulse, and propulsive impulse. For crossing high obstacle,
significant differences were found between LL and TL in first peak vertical force,
minimum vertical force, braking peak force, propulsive peak force, braking impulse,
and propulsive impulse (Winter, 2009). In addition, high obstacle requires slightly
more energy when compared to low obstacle walking and the strides made, that is
strip length is slightly low than low obstacle walking. The braking force is also higher
for both left and right feet when compared to low obstacle walking condition.
curves.
Comparisons of force variables between feet in each walking
condition
Comparison both feet in relation to braking force both vertical and horizontal we
observed variation when walking unobstructed, high obstacle or over obstacles.
No significant difference between the left and right sides was found when walking in
the no obstacle condition. When crossing the low obstacle height, there were
significant differences of time to the second peak force and time to propulsive peak
force between Lead Leg, LL (right foot) and Trail Leg, TL (left or stance foot).
When crossing the high obstacle height, significant differences were found between
the LL and TL in time to propulsive peak force, minimum vertical force, propulsive
peak force, braking impulse, and propulsive impulse. For crossing high obstacle,
significant differences were found between LL and TL in first peak vertical force,
minimum vertical force, braking peak force, propulsive peak force, braking impulse,
and propulsive impulse (Winter, 2009). In addition, high obstacle requires slightly
more energy when compared to low obstacle walking and the strides made, that is
strip length is slightly low than low obstacle walking. The braking force is also higher
for both left and right feet when compared to low obstacle walking condition.
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
Discussion
We investigated kinetic and temporal ways adopted in healthy young adults whereas
stepping over obstacles of various heights. we tend to determine the influence of
condition and limb, additionally as interaction impact of condition and limb, on
kinetic variables whereas stepping over obstacles. within the no obstacle condition,
similar patterns and values of the variables for the LL and TL were incontestable as
general gait character (Fabio Augusto Barbieri, 2017). The distinction of force
generation between the LL and TL inflated with bigger obstacle heights. Alterations
of the temporal, force, and impulse were found within the vertical and anteroposterior
directions.
We found changes in kinetic variables following completely different obstacle
conditions. Stepping over a high obstacle needed longer time to peak force, inflated
force, and inflated impulse in each the LL and TL, aside from time to braking peak
force. The key moment of obstacle crossing happens once the LL lands once stepping
over associate obstacle and therefore the TL should generate propulsive force to hold
the body and the TL across the obstacle; this is often when the weight is on the LL
and the TL steps over the obstacle safely while not visual feedback. action of the task
incontestable bodily property and balance management on the TL, plus motor
government operate of the LL.
Previous studies incontestable that ordinary adults are able to change their limb to
permit the foot to clear the obstacle. The lead foot clearance assessed by distance
between toe and obstacle failed to amendment even once the obstacle height was
inflated whereas path clearance increased with increasing obstacle height.
management of human locomotion needs a correct motor coordination strategy that's
safe and energy economical. A high gait is also a technique to avoid tripping over
associate obstacle. Asymmetrical toe clearance will increase risk of tripping whereas
senior people try and step over an obstacle, with a lot of lower distance of foot
clearing of the TL than the LL. However, a technique of high stepping or excessive
asymmetrical gait modulation creates high demand of metabolic energy and reduces
management for traditional movement. Previous analysis on gait pattern
diversifications once stepping over obstacles of various heights incontestable that step
length wasn't influenced by the peak, however that crossing speed diminished and
step length inflated across obstacle heights. Over completely different obstacle
heights, the middle of pressure rate throughout the loading response part wasn't
modified, however diminished throughout mid-stance (Mark L. Latash, 2015). within
the gift study, we tend to found kinetic alteration whereas stepping over obstacles of
various heights, as incontestable by ability of obstacle crossing in young healthy
adults. The time to minimum force, time to the second peak force, and time to
propulsive peak force were inflated following the increased obstacle height, each
within the LL and TL. Increase in braking and propulsive peak forces and increase in
vertical and propulsive impulses were incontestable once height was inflated, each
within the LL and TL. Moreover, the TL had bigger ability effective variables
compared to the LL. These findings incontestable a rise within the 1st peak vertical
We investigated kinetic and temporal ways adopted in healthy young adults whereas
stepping over obstacles of various heights. we tend to determine the influence of
condition and limb, additionally as interaction impact of condition and limb, on
kinetic variables whereas stepping over obstacles. within the no obstacle condition,
similar patterns and values of the variables for the LL and TL were incontestable as
general gait character (Fabio Augusto Barbieri, 2017). The distinction of force
generation between the LL and TL inflated with bigger obstacle heights. Alterations
of the temporal, force, and impulse were found within the vertical and anteroposterior
directions.
We found changes in kinetic variables following completely different obstacle
conditions. Stepping over a high obstacle needed longer time to peak force, inflated
force, and inflated impulse in each the LL and TL, aside from time to braking peak
force. The key moment of obstacle crossing happens once the LL lands once stepping
over associate obstacle and therefore the TL should generate propulsive force to hold
the body and the TL across the obstacle; this is often when the weight is on the LL
and the TL steps over the obstacle safely while not visual feedback. action of the task
incontestable bodily property and balance management on the TL, plus motor
government operate of the LL.
Previous studies incontestable that ordinary adults are able to change their limb to
permit the foot to clear the obstacle. The lead foot clearance assessed by distance
between toe and obstacle failed to amendment even once the obstacle height was
inflated whereas path clearance increased with increasing obstacle height.
management of human locomotion needs a correct motor coordination strategy that's
safe and energy economical. A high gait is also a technique to avoid tripping over
associate obstacle. Asymmetrical toe clearance will increase risk of tripping whereas
senior people try and step over an obstacle, with a lot of lower distance of foot
clearing of the TL than the LL. However, a technique of high stepping or excessive
asymmetrical gait modulation creates high demand of metabolic energy and reduces
management for traditional movement. Previous analysis on gait pattern
diversifications once stepping over obstacles of various heights incontestable that step
length wasn't influenced by the peak, however that crossing speed diminished and
step length inflated across obstacle heights. Over completely different obstacle
heights, the middle of pressure rate throughout the loading response part wasn't
modified, however diminished throughout mid-stance (Mark L. Latash, 2015). within
the gift study, we tend to found kinetic alteration whereas stepping over obstacles of
various heights, as incontestable by ability of obstacle crossing in young healthy
adults. The time to minimum force, time to the second peak force, and time to
propulsive peak force were inflated following the increased obstacle height, each
within the LL and TL. Increase in braking and propulsive peak forces and increase in
vertical and propulsive impulses were incontestable once height was inflated, each
within the LL and TL. Moreover, the TL had bigger ability effective variables
compared to the LL. These findings incontestable a rise within the 1st peak vertical
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser

force and braking impulse and a decrease in minimum force once height was inflated
solely in the TL. The findings are per a previous kinetic study according that the
thallium generated bigger vertical and propulsive forces throughout the push-off part
than the LL.
Obstacle crossing is requiring reciprocally dependent management of the LL and TL.
For traditional management, we tend to found that the distinction between LL and TL
was inflated within the tested variables once the peak of obstacle was increased.
Comparisons among conditions in every limb incontestable the ability of your time
and force management once the peak was inflated. Time to minimum force, time to
the second peak force, and time to braking peak force were delayed once height was
inflated. Braking peak force was inflated with increased obstacle height, however was
comparatively constant once ever-changing from the low to high obstacle height in
each the LL and TL once confronted with obstacles of various heights, body
movement is changed, permitting correct force generation and absorption, maybe
related to maintaining bodily property balance and reducing energy consumption. this
is often supported by the unchanged values of some variables like braking impulse of
the LL and propulsive impulse of the TL once obstacle height modified from twenty
cm to thirty cm. It's additionally vital to notice that the force–time characteristic
beneath the LL reflects not solely management of TL over obstacles however also
landing of the LL once clearing obstacles.
Conclusion
Our results show that the constraints of stepping over obstacles required completely
different kinetic demands on the LL and Tl, with the sophisticated interaction of force
time characteristics. Strategic movement management throughout obstacle crossing
with completely different heights in young healthy subjects indicated the power to
adapt movement to environmental conditions. These findings are also used as a model
once examination healthy adolescents to the aged and to people who have physical
impairments. any analysis ought to investigate the intersegmental dynamic
management and muscle activity underlying motion changes throughout obstacle
crossing.
References
Acton, Q. A. (2012). Endocrine System Diseases: Advances in Research and
Treatment: 2011 Edition. Atlanta: ScholarlyEditions.
solely in the TL. The findings are per a previous kinetic study according that the
thallium generated bigger vertical and propulsive forces throughout the push-off part
than the LL.
Obstacle crossing is requiring reciprocally dependent management of the LL and TL.
For traditional management, we tend to found that the distinction between LL and TL
was inflated within the tested variables once the peak of obstacle was increased.
Comparisons among conditions in every limb incontestable the ability of your time
and force management once the peak was inflated. Time to minimum force, time to
the second peak force, and time to braking peak force were delayed once height was
inflated. Braking peak force was inflated with increased obstacle height, however was
comparatively constant once ever-changing from the low to high obstacle height in
each the LL and TL once confronted with obstacles of various heights, body
movement is changed, permitting correct force generation and absorption, maybe
related to maintaining bodily property balance and reducing energy consumption. this
is often supported by the unchanged values of some variables like braking impulse of
the LL and propulsive impulse of the TL once obstacle height modified from twenty
cm to thirty cm. It's additionally vital to notice that the force–time characteristic
beneath the LL reflects not solely management of TL over obstacles however also
landing of the LL once clearing obstacles.
Conclusion
Our results show that the constraints of stepping over obstacles required completely
different kinetic demands on the LL and Tl, with the sophisticated interaction of force
time characteristics. Strategic movement management throughout obstacle crossing
with completely different heights in young healthy subjects indicated the power to
adapt movement to environmental conditions. These findings are also used as a model
once examination healthy adolescents to the aged and to people who have physical
impairments. any analysis ought to investigate the intersegmental dynamic
management and muscle activity underlying motion changes throughout obstacle
crossing.
References
Acton, Q. A. (2012). Endocrine System Diseases: Advances in Research and
Treatment: 2011 Edition. Atlanta: ScholarlyEditions.
Fabio Augusto Barbieri, R. V. (2017). Locomotion and Posture in Older Adults: The
Role of Aging and Movement Disorders. New York: Springer.
HIBBELER. (2016). Engineering Mechanics: Dynamics SI Units. Melbourne:
Pearson Education Australia.
Mark L. Latash, V. Z. (2015). Biomechanics and Motor Control: Defining Central
Concepts. Amsterdam: Elsevier Science.
Pamela K Levangie, C. C. (2011). Joint Structure and Function: A Comprehensive
Analysis. Philadelphia: F.A. Davis.
Winter, D. A. (2009). Biomechanics and Motor Control of Human Movement.
Ontario: John Wiley & Sons.
Role of Aging and Movement Disorders. New York: Springer.
HIBBELER. (2016). Engineering Mechanics: Dynamics SI Units. Melbourne:
Pearson Education Australia.
Mark L. Latash, V. Z. (2015). Biomechanics and Motor Control: Defining Central
Concepts. Amsterdam: Elsevier Science.
Pamela K Levangie, C. C. (2011). Joint Structure and Function: A Comprehensive
Analysis. Philadelphia: F.A. Davis.
Winter, D. A. (2009). Biomechanics and Motor Control of Human Movement.
Ontario: John Wiley & Sons.
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
1 out of 9
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.