Autonomous Vehicles and Traffic Control Assignment 2022
VerifiedAdded on 2022/10/11
|17
|4654
|7
Assignment
AI Summary
Contribute Materials
Your contribution can guide someone’s learning journey. Share your
documents today.

Running Head: AUTONOMOUS VEHICLES AND TRAFFIC CONTROL
AUTONOMOUS VEHICLES AND TRAFFIC CONTROL
Name of the Student:
Name of the University:
Author Note:
AUTONOMOUS VEHICLES AND TRAFFIC CONTROL
Name of the Student:
Name of the University:
Author Note:
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.
Executive Summary
In this modern world, technology is increasing rapidly. With the advancement in technology,
modern cars are also evolving and the latest technology is the autonomous smart vehicles. The
smart vehicles are packed with so many features and automatic control, which do not require a
driver to control the car. These cars uses the latest modern technologies like the AI or artificial
intelligence, sensors and IoT, which I also known as Internet of things. Autonomous cars are also
known as self-driving cars or driverless cars. There are different levels of autonomous vehicles.
The traffic in the urban areas are also increasing. The construction works in the roads are also
responsible for traffic jams. The use of autonomous vehicle to control the traffic is not a very
remarkable solution. A traffic control system to control the traffic on the roads, which will take
control of the vehicles at every step is discussed and proposed in this report. The system
requirements for this are also discussed through this report. In addition, some suggestion were
also provided for a better decision on implementing and designing the system. In conclusion, a
logical design of the system is provided and also some suggestion were put down down based on
that.
In this modern world, technology is increasing rapidly. With the advancement in technology,
modern cars are also evolving and the latest technology is the autonomous smart vehicles. The
smart vehicles are packed with so many features and automatic control, which do not require a
driver to control the car. These cars uses the latest modern technologies like the AI or artificial
intelligence, sensors and IoT, which I also known as Internet of things. Autonomous cars are also
known as self-driving cars or driverless cars. There are different levels of autonomous vehicles.
The traffic in the urban areas are also increasing. The construction works in the roads are also
responsible for traffic jams. The use of autonomous vehicle to control the traffic is not a very
remarkable solution. A traffic control system to control the traffic on the roads, which will take
control of the vehicles at every step is discussed and proposed in this report. The system
requirements for this are also discussed through this report. In addition, some suggestion were
also provided for a better decision on implementing and designing the system. In conclusion, a
logical design of the system is provided and also some suggestion were put down down based on
that.
Table of Contents
Introduction......................................................................................................................................4
Autonomous vehicle........................................................................................................................4
Prevalent Traffic System.................................................................................................................7
System requirements......................................................................................................................10
Purpose and scope..........................................................................................................................11
ER-Diagram...................................................................................................................................12
Logical design................................................................................................................................13
Conclusion.....................................................................................................................................13
Recommendation...........................................................................................................................14
References......................................................................................................................................15
Introduction......................................................................................................................................4
Autonomous vehicle........................................................................................................................4
Prevalent Traffic System.................................................................................................................7
System requirements......................................................................................................................10
Purpose and scope..........................................................................................................................11
ER-Diagram...................................................................................................................................12
Logical design................................................................................................................................13
Conclusion.....................................................................................................................................13
Recommendation...........................................................................................................................14
References......................................................................................................................................15
Introduction
The autonomous traffic system that is being focused in this report is stated to be the one
of the effective methodologies that will be adhered with the overall constraints in regards to the
traffic management as well as the automated cars that will be used for maintaining this type of
system. The report will be efficiently dealing with the factors of the prevalent traffic system, the
changes that is to be required for making this procedure autonomous, the concept of automated
cars that will help the enhancement of the automated traffic system as well as the overall
mechanism of the automated traffic system (Chowdhury & Ray, 2017). The concept of the
automated traffic management tends to ease the overall management of the traffic as well as
development of the emergency traffic control management system in regards to the fact of any
accident and incompetence situation within the roads. Moreover, the advantages as well as the
disadvantages of the prevalent system for which the automated system is necessary is also
included in this report (Solanki et al., 2016). In addition to this, the significant advantages as well
as the disadvantages in association with the automated traffic system will also be discussed for
the clear reflection of the necessity of this system within the country of Australia.
Autonomous vehicle
The need of the autonomous vehicle within the environment of the autonomous traffic
system is a significant feature that is to be included for the enhanced flow of the overall traffic
systems. This part of the report will be dealing with the fact of the probable sections that are to
be adhered for the success of the overall project (Barankova, Mikhailova & Lukianov, 2016).
The autonomous vehicles are to be used by the traffic management system is to be aligned with
the significant features of the cars, as these cars will be playing an important role in the
The autonomous traffic system that is being focused in this report is stated to be the one
of the effective methodologies that will be adhered with the overall constraints in regards to the
traffic management as well as the automated cars that will be used for maintaining this type of
system. The report will be efficiently dealing with the factors of the prevalent traffic system, the
changes that is to be required for making this procedure autonomous, the concept of automated
cars that will help the enhancement of the automated traffic system as well as the overall
mechanism of the automated traffic system (Chowdhury & Ray, 2017). The concept of the
automated traffic management tends to ease the overall management of the traffic as well as
development of the emergency traffic control management system in regards to the fact of any
accident and incompetence situation within the roads. Moreover, the advantages as well as the
disadvantages of the prevalent system for which the automated system is necessary is also
included in this report (Solanki et al., 2016). In addition to this, the significant advantages as well
as the disadvantages in association with the automated traffic system will also be discussed for
the clear reflection of the necessity of this system within the country of Australia.
Autonomous vehicle
The need of the autonomous vehicle within the environment of the autonomous traffic
system is a significant feature that is to be included for the enhanced flow of the overall traffic
systems. This part of the report will be dealing with the fact of the probable sections that are to
be adhered for the success of the overall project (Barankova, Mikhailova & Lukianov, 2016).
The autonomous vehicles are to be used by the traffic management system is to be aligned with
the significant features of the cars, as these cars will be playing an important role in the
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.
management of the autonomous traffic systems. These cars are identified as the powerful agents
within the traffic management systems as these are the primary feature of the system that will
effectively cooperate in regards to the management of the traffic in an efficient manner. The
primary feature that is to be adhered by the automated vehicles is said as the inclusion of the high
accuracy GPS device whose results will be aligned to the traffic system that will help the
management system to effectively manage the traffic persisting within the city (Ulbrich et al.,
2017). There are significant levels of the automated cars that are to be adhered by the traffic
management system in order to depict the quality of the automation within the traffic
management system. These are briefly stated as follows:
Level 0 or No Automation: These type of vehicles are stated to be the vehicles that are mainly
seen within the manual traffic system. This vehicle does not comprises of the fact that they can
run automatically at all (Islam et al., 2016). This vehicle significantly describes the fact that they
need a driver to be in motion. Moreover, this type of vehicles may not be significantly used
within the automated traffic management system.
Level 1 or Driver Assistance: The vehicles falling into this category helps in the adaptive
control of the cruise as well as provides a feature of the lane keep assist in accordance to drive in
fatigue conditions. The adaptive control of the cruise helps the vehicles to maintain a safe
distance in between two cars (Heikoop et al., 2017). Moreover, the lane keep assist helps in the
maintenance of the nudge that are significantly associated with the identification of the nudges
present within the roads in which the vehicle is passing through. These will be a very important
portion in regards to the control of the driver.
Level 2 or Partial Automation: The vehicles falling into this category are associate with et
control of the speed as well as the steering. This will be significantly helpful in regards to the
within the traffic management systems as these are the primary feature of the system that will
effectively cooperate in regards to the management of the traffic in an efficient manner. The
primary feature that is to be adhered by the automated vehicles is said as the inclusion of the high
accuracy GPS device whose results will be aligned to the traffic system that will help the
management system to effectively manage the traffic persisting within the city (Ulbrich et al.,
2017). There are significant levels of the automated cars that are to be adhered by the traffic
management system in order to depict the quality of the automation within the traffic
management system. These are briefly stated as follows:
Level 0 or No Automation: These type of vehicles are stated to be the vehicles that are mainly
seen within the manual traffic system. This vehicle does not comprises of the fact that they can
run automatically at all (Islam et al., 2016). This vehicle significantly describes the fact that they
need a driver to be in motion. Moreover, this type of vehicles may not be significantly used
within the automated traffic management system.
Level 1 or Driver Assistance: The vehicles falling into this category helps in the adaptive
control of the cruise as well as provides a feature of the lane keep assist in accordance to drive in
fatigue conditions. The adaptive control of the cruise helps the vehicles to maintain a safe
distance in between two cars (Heikoop et al., 2017). Moreover, the lane keep assist helps in the
maintenance of the nudge that are significantly associated with the identification of the nudges
present within the roads in which the vehicle is passing through. These will be a very important
portion in regards to the control of the driver.
Level 2 or Partial Automation: The vehicles falling into this category are associate with et
control of the speed as well as the steering. This will be significantly helpful in regards to the
fact that the adaptive control will help in the maintenance of the car distance as well as the stated
feature will help the driver to maintain the appropriate lane distance with the driver helping it, in
regards with maintaining the car in a perfect lane.
Level 3 or Conditional Automation: These are started as the fact that the autonomous vehicles
are mainly capable of driving themselves (Kopardekar et al., 2016). Moreover, the ideal
conditions and limited access of the vehicle speed may be significantly identified to help the
automated traffic management systems but there are certain issues that may be adhered for the
road conditions.
Level 4 or High Automation: This type of vehicles are significantly depicts that they can drive
themselves without any human interactions. These are stated to be the fact that the automated
vehicles may be quite quickly seen on the road, which will possess no drivers (Payre et al.,
2017). These cars will be helping in the automated traffic management system efficiently as they
will be provided an enhanced direction with the help of the effective traffic methodologies,
which will be stated in the further parts of the report.
Level 5 or Full Automation: These are said to be the fact that the vehicles are stated to be true
driverless cars. These cars has effective methodologies with inbuilt artificial intelligence that will
help the traffic management system to be duly effective in terms of the vehicles associated with
the system. There are no significant steering wheel as well as pedals. These cars only possess
passenger seats to carry travellers. The capable artificial intelligence methodology is stated to be
very effective in terms of the traffic management system. Thus the concept of the traffic
management system will be duly effective as well as enhanced in regards to the fact of the
effective traffic management within the country of Australia.
feature will help the driver to maintain the appropriate lane distance with the driver helping it, in
regards with maintaining the car in a perfect lane.
Level 3 or Conditional Automation: These are started as the fact that the autonomous vehicles
are mainly capable of driving themselves (Kopardekar et al., 2016). Moreover, the ideal
conditions and limited access of the vehicle speed may be significantly identified to help the
automated traffic management systems but there are certain issues that may be adhered for the
road conditions.
Level 4 or High Automation: This type of vehicles are significantly depicts that they can drive
themselves without any human interactions. These are stated to be the fact that the automated
vehicles may be quite quickly seen on the road, which will possess no drivers (Payre et al.,
2017). These cars will be helping in the automated traffic management system efficiently as they
will be provided an enhanced direction with the help of the effective traffic methodologies,
which will be stated in the further parts of the report.
Level 5 or Full Automation: These are said to be the fact that the vehicles are stated to be true
driverless cars. These cars has effective methodologies with inbuilt artificial intelligence that will
help the traffic management system to be duly effective in terms of the vehicles associated with
the system. There are no significant steering wheel as well as pedals. These cars only possess
passenger seats to carry travellers. The capable artificial intelligence methodology is stated to be
very effective in terms of the traffic management system. Thus the concept of the traffic
management system will be duly effective as well as enhanced in regards to the fact of the
effective traffic management within the country of Australia.

Prevalent Traffic System
The traffic system which is commonly known as the Sydney Coordinated Adaptive Traffic
system which is abbreviated as SCATS is referred to as an intelligent system of transportation
which manages the related timing of the signal phases for the traffic signals which means that it
tries to find the best timing for the situation related to that of the traffic (Bonnefon, Shariff &
Rahwan, 2016). SCATS is completely based upon the automatic selection of plan from a
regarded response of a library towards the derivation of data from the loop detectors or the other
road sensors of the traffic.
SCATS has implemented and used a number of sensors at each of the traffic signal to the
detection of the presence of vehicle in every lane and the pedestrians who have been waiting for
a long time to cross the road. The sensors detecting the vehicles are generally a lot inductive as
loops which have been installed within the pavement of the road. The sensors related to the
pedestrians are generally push buttons (Menze & Geiger, 2015). A number of different sensors
can be utilized for the detection of the presence of vehicle, provided such a similar and constant
output has been achieved. Data collected from the vehicle sensors provision the SCATS to make
calculations and adapt to the timing of the traffic signals present within the network of the roads.
SCATS has been installed at about 42,000 intersections in over the 1800 cities around a
length of 40 countries allover. Situated within Australia, the system was first developed and had
been the majority of the sensors being controlled by SCATS since then (Gerla et al., 2014). The
architecture related to SCATS has two basic levels which is referred to as, local and master. The
local refers to the control cabinet present by the roadside provisions of the existing normal signal
controlling measure as well as the processing of the traffic related information deduced from the
detectors of vehicles (Fagnant & Kockelman, 2014). On the other hand, the master is a remote
The traffic system which is commonly known as the Sydney Coordinated Adaptive Traffic
system which is abbreviated as SCATS is referred to as an intelligent system of transportation
which manages the related timing of the signal phases for the traffic signals which means that it
tries to find the best timing for the situation related to that of the traffic (Bonnefon, Shariff &
Rahwan, 2016). SCATS is completely based upon the automatic selection of plan from a
regarded response of a library towards the derivation of data from the loop detectors or the other
road sensors of the traffic.
SCATS has implemented and used a number of sensors at each of the traffic signal to the
detection of the presence of vehicle in every lane and the pedestrians who have been waiting for
a long time to cross the road. The sensors detecting the vehicles are generally a lot inductive as
loops which have been installed within the pavement of the road. The sensors related to the
pedestrians are generally push buttons (Menze & Geiger, 2015). A number of different sensors
can be utilized for the detection of the presence of vehicle, provided such a similar and constant
output has been achieved. Data collected from the vehicle sensors provision the SCATS to make
calculations and adapt to the timing of the traffic signals present within the network of the roads.
SCATS has been installed at about 42,000 intersections in over the 1800 cities around a
length of 40 countries allover. Situated within Australia, the system was first developed and had
been the majority of the sensors being controlled by SCATS since then (Gerla et al., 2014). The
architecture related to SCATS has two basic levels which is referred to as, local and master. The
local refers to the control cabinet present by the roadside provisions of the existing normal signal
controlling measure as well as the processing of the traffic related information deduced from the
detectors of vehicles (Fagnant & Kockelman, 2014). On the other hand, the master is a remote
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
computer provisions the area based traffic control which refers to the area traffic control as well
as that of the urban traffic control. Detailed description related to the traffic signal as well as the
hardware diagnostics are passed from the local to the master with a different ability to notify the
staff as and when required (Trepagnier et al., 2013).
Public vehicle priority in SCATS provides the service for both the buses as well as the
trams (Krueger, Rashidi & Rose, 2016) the traffic system consists of three facilities to provide
with the implementation of its system. These three levels of service are,
i) High- within this mode the hurry call facility is being utilized which is the phase
which is needed by the tram being called immediately skipping all of the other
phases.
ii) Medium- within this mode the phases have been shortened to provision the bus or
maybe the tram to be brought early. This phase can take place more than one time
within the running of the cycle.
iii) Low- this mode within the running cycle takes its time to function and get
implemented.
Advantages and Disadvantages of Driverless cars
The advantages of the driverless cars have been mentioned down below as follows,
i) Without the need of a driver to drive the cars, cars could have become mini leisure
rooms for relaxation (Shah et al., 2018). Without the actual need for the controls,
there would exist more space which is available for the vehicle and for no passengers
to face forward and drive the car while the car is running.
as that of the urban traffic control. Detailed description related to the traffic signal as well as the
hardware diagnostics are passed from the local to the master with a different ability to notify the
staff as and when required (Trepagnier et al., 2013).
Public vehicle priority in SCATS provides the service for both the buses as well as the
trams (Krueger, Rashidi & Rose, 2016) the traffic system consists of three facilities to provide
with the implementation of its system. These three levels of service are,
i) High- within this mode the hurry call facility is being utilized which is the phase
which is needed by the tram being called immediately skipping all of the other
phases.
ii) Medium- within this mode the phases have been shortened to provision the bus or
maybe the tram to be brought early. This phase can take place more than one time
within the running of the cycle.
iii) Low- this mode within the running cycle takes its time to function and get
implemented.
Advantages and Disadvantages of Driverless cars
The advantages of the driverless cars have been mentioned down below as follows,
i) Without the need of a driver to drive the cars, cars could have become mini leisure
rooms for relaxation (Shah et al., 2018). Without the actual need for the controls,
there would exist more space which is available for the vehicle and for no passengers
to face forward and drive the car while the car is running.
ii) The technology which is related to entertainment such as the likes of video screens
could be implemented as well as utilized without the actual concern of getting
distracted while driving the car.
iii) The humans while driving the cars blatantly go against the rules and take a lot of
risks, however the driverless cars will be compelled to obey every related rule and
within the speed limit which is set.
iv) The travelers already present within the car would be able to enjoy the whole journey
which is taking place overnight.
v) The control of traffic taking place within the urban areas can be smoother to prevent
the bottlenecks as well as the traffic jams which stand busy most of the times.
vi) The fatigue from driving and getting lost would be easily ignored while getting the
usage of driverless cars.
The disadvantages of having driverless cars have been mentioned below, these are,
i) A driverless car would cost up to a price of over $100,000 which would nearly be
unaffordable for most of the people in the present age.
ii) Truck drivers as well as that of taxi drivers and the other delivery people will
eventually lead to the losing of jobs if the autonomous vehicles come into existence.
iii) A malfunction within the computer or a minor glitch can lead to the breakdown of the
car and hence, resulting into the barrier within the journey.
iv) The cars would heavily have their reliance upon the collection of location as well as
the information related to the user having created privacy concerns that stand major.
could be implemented as well as utilized without the actual concern of getting
distracted while driving the car.
iii) The humans while driving the cars blatantly go against the rules and take a lot of
risks, however the driverless cars will be compelled to obey every related rule and
within the speed limit which is set.
iv) The travelers already present within the car would be able to enjoy the whole journey
which is taking place overnight.
v) The control of traffic taking place within the urban areas can be smoother to prevent
the bottlenecks as well as the traffic jams which stand busy most of the times.
vi) The fatigue from driving and getting lost would be easily ignored while getting the
usage of driverless cars.
The disadvantages of having driverless cars have been mentioned below, these are,
i) A driverless car would cost up to a price of over $100,000 which would nearly be
unaffordable for most of the people in the present age.
ii) Truck drivers as well as that of taxi drivers and the other delivery people will
eventually lead to the losing of jobs if the autonomous vehicles come into existence.
iii) A malfunction within the computer or a minor glitch can lead to the breakdown of the
car and hence, resulting into the barrier within the journey.
iv) The cars would heavily have their reliance upon the collection of location as well as
the information related to the user having created privacy concerns that stand major.
v) The existing hackers getting into software of the vehicle as well as the controlling of
the operation would lead to a major of the concerns which have been existing.
System requirements
For building a system, that successfully and effectively operates traffic control, the first
thing will be required is the concept of Artificial Intelligence. Artificial Intelligence has
developed so much in recent years. The main reason for choosing AI is that it uses different
algorithms that updates the algorithm by itself according the observation (Kammoun et al.,
2014). For example, Genetic Algorithm is based on biological concept of evolution that is
“survival of the fittest”. It deals with complex algorithms which is generally used in urban
network design. there are several more algorithms can be used like Simulated Annealing, Ant
Colony Optimiser(developed on the basis of ant behaviour), Artificial immune system (based
immune systems of human), bee colony optimisation (using behaviour of bee colony) etc.
(Kistan, Gardi & Sabatini, 2018). For this specific task Ant Colony Optimiser is preferred as the
traffic control and lane changing, deceleration in ant colonies through their small tunnels is
similar to the human traffic. First, the optimal road design is required as the smoother, sensor
equipped and light reflectors will be useful for better prediction. This type of Roads will define a
definite Network design. Second, the car should have all controls to the system which are
Automation NHTSA level 3, 4 or 5 level cars (Boesch, Ciari & Axhausen, 2016). The cars will
be equipped with sensors like motion capture, infrared, Wi-Fi which will be internet enabled. For
establishing a connection and communication between car and system will required the web
server based approach. The lane changing is decided by the Artificial Intelligence algorithm will
adapt the position after sensing near objects in the environment with the help of motion capture
(Litkouhi, Wei & Dolan, 2014). The AI also decides whether It is safe or not to change a lane.
the operation would lead to a major of the concerns which have been existing.
System requirements
For building a system, that successfully and effectively operates traffic control, the first
thing will be required is the concept of Artificial Intelligence. Artificial Intelligence has
developed so much in recent years. The main reason for choosing AI is that it uses different
algorithms that updates the algorithm by itself according the observation (Kammoun et al.,
2014). For example, Genetic Algorithm is based on biological concept of evolution that is
“survival of the fittest”. It deals with complex algorithms which is generally used in urban
network design. there are several more algorithms can be used like Simulated Annealing, Ant
Colony Optimiser(developed on the basis of ant behaviour), Artificial immune system (based
immune systems of human), bee colony optimisation (using behaviour of bee colony) etc.
(Kistan, Gardi & Sabatini, 2018). For this specific task Ant Colony Optimiser is preferred as the
traffic control and lane changing, deceleration in ant colonies through their small tunnels is
similar to the human traffic. First, the optimal road design is required as the smoother, sensor
equipped and light reflectors will be useful for better prediction. This type of Roads will define a
definite Network design. Second, the car should have all controls to the system which are
Automation NHTSA level 3, 4 or 5 level cars (Boesch, Ciari & Axhausen, 2016). The cars will
be equipped with sensors like motion capture, infrared, Wi-Fi which will be internet enabled. For
establishing a connection and communication between car and system will required the web
server based approach. The lane changing is decided by the Artificial Intelligence algorithm will
adapt the position after sensing near objects in the environment with the help of motion capture
(Litkouhi, Wei & Dolan, 2014). The AI also decides whether It is safe or not to change a lane.
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.
For a left side traffic, the car will change a lane if there is no present in the right or approaching.
For calculating the movement of the car and predicting the position of other vehicles using
motion sensor decides that condition of the change. Same goes for changing a lane right from
left, where left lane will be checked (Kim & Kumar, 2014). The need of lane change is also
considerable as presence of another vehicle in front of the car triggers the lane change. The
change lane will use the infrared sensor that will follow the lane changing lines which will be
printed on the road. Infrared sensor can detect the black and white light radiation and
differentiate between them.
For the traffic control and lights, IOT based approach is preferred to control the flow of
traffic. This part of the system needs processor, high resolution cameras (that can identify the
number plate), Wi-Fi, raspberry-pi with micro-controller enabled system having infrared sensor,
HDMI port for monitoring purpose, USB ports, graphics accelerator and open GL graphics
processor for encoding and decoding visual files (Shadrin, Varlamov & Ivanov, 2017). The
system also requires memory and storage (cloud based is preferred) for storing the database that
collects the information of different behaviour aspects.
Purpose and scope
In recent few years, Artificial intelligence has brought big changes in the aspect of
machine learning. The main for establishing totally an AI based traffic management system with
automated vehicles is to reduce the jams and keeping the traffic in movement (Fernandes,
Rodrigues & Proenca Jr, 2015). AI will analyse the flow of the traffic, pattern of the flow and
then determine the traffic signals, lane change of a vehicle and acceleration or deceleration of
vehicles. The lesser traffic jam will benefit each individual as the fuel consumptions will become
For calculating the movement of the car and predicting the position of other vehicles using
motion sensor decides that condition of the change. Same goes for changing a lane right from
left, where left lane will be checked (Kim & Kumar, 2014). The need of lane change is also
considerable as presence of another vehicle in front of the car triggers the lane change. The
change lane will use the infrared sensor that will follow the lane changing lines which will be
printed on the road. Infrared sensor can detect the black and white light radiation and
differentiate between them.
For the traffic control and lights, IOT based approach is preferred to control the flow of
traffic. This part of the system needs processor, high resolution cameras (that can identify the
number plate), Wi-Fi, raspberry-pi with micro-controller enabled system having infrared sensor,
HDMI port for monitoring purpose, USB ports, graphics accelerator and open GL graphics
processor for encoding and decoding visual files (Shadrin, Varlamov & Ivanov, 2017). The
system also requires memory and storage (cloud based is preferred) for storing the database that
collects the information of different behaviour aspects.
Purpose and scope
In recent few years, Artificial intelligence has brought big changes in the aspect of
machine learning. The main for establishing totally an AI based traffic management system with
automated vehicles is to reduce the jams and keeping the traffic in movement (Fernandes,
Rodrigues & Proenca Jr, 2015). AI will analyse the flow of the traffic, pattern of the flow and
then determine the traffic signals, lane change of a vehicle and acceleration or deceleration of
vehicles. The lesser traffic jam will benefit each individual as the fuel consumptions will become
less. In other way, there will be also less pollution as the carbon emission will become less. The
inconsistent movement of vehicles produce more smoke than a car which is moving with
consistent velocity. Implementation of totally system controlled traffic will provide future scopes
for upcoming generation of cars where the driver will not be present (Gerla et al., 2014). The
whole technical world is shifting towards the Artificial Intelligence from human based manual
processes. In future, it will help to build smart cities where their traffic management is already
automated as the big cities have the most traffic related problems.
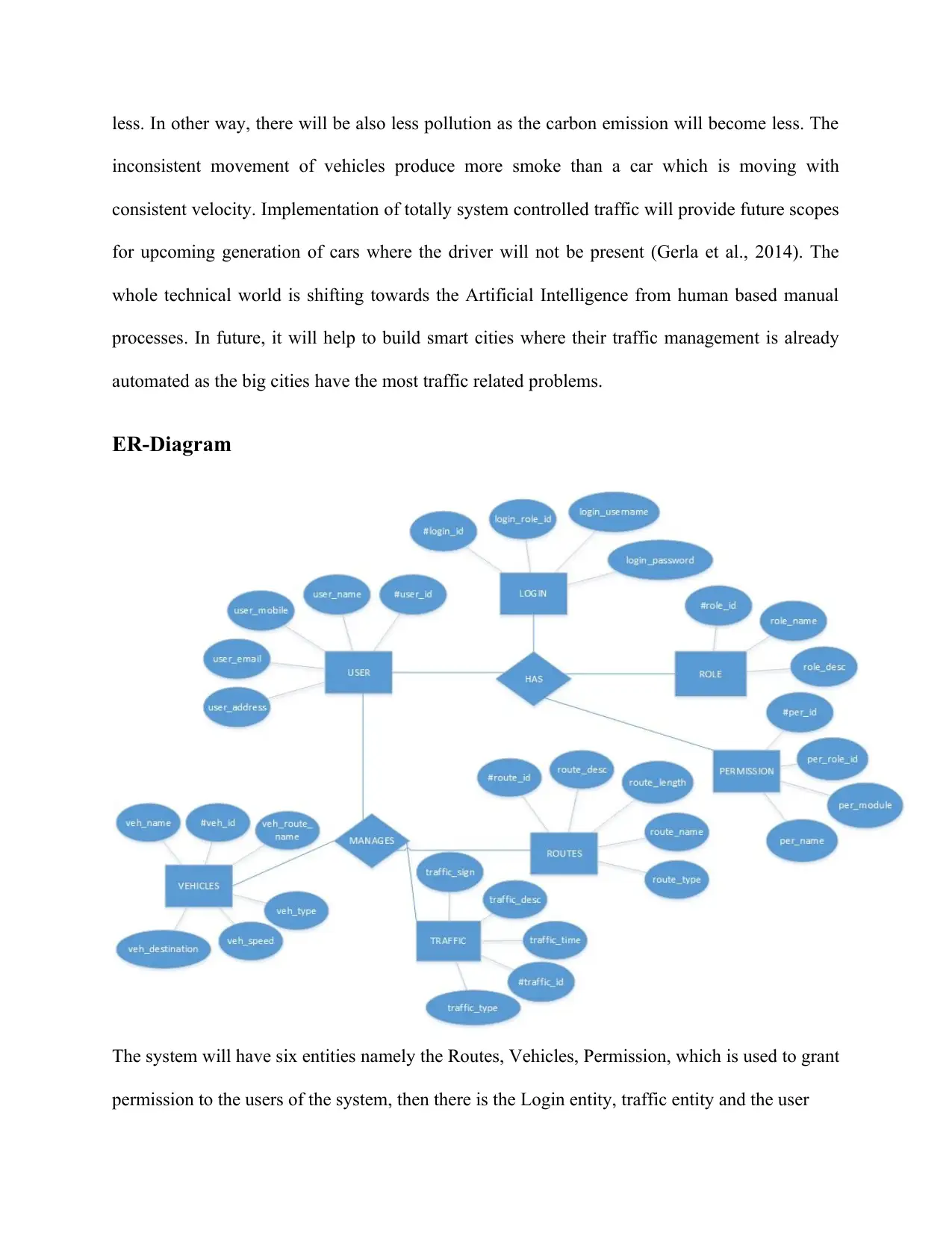
ER-Diagram
The system will have six entities namely the Routes, Vehicles, Permission, which is used to grant
permission to the users of the system, then there is the Login entity, traffic entity and the user
inconsistent movement of vehicles produce more smoke than a car which is moving with
consistent velocity. Implementation of totally system controlled traffic will provide future scopes
for upcoming generation of cars where the driver will not be present (Gerla et al., 2014). The
whole technical world is shifting towards the Artificial Intelligence from human based manual
processes. In future, it will help to build smart cities where their traffic management is already
automated as the big cities have the most traffic related problems.
ER-Diagram
The system will have six entities namely the Routes, Vehicles, Permission, which is used to grant
permission to the users of the system, then there is the Login entity, traffic entity and the user
entity. The user entity defines the users of the systems who will control the system. The traffic
entity will store the traffic signs, the traffic type according to the area, the traffic id for a
particular area, and the time to cross the traffic in that area. The traffic description attribute will
explain the traffic conditions and the road condition of the area. The routes will store the route
details. The user and login entity is used for the user and login details. Every user of the system
has some role and the role entity stores the details about the roles of the user.
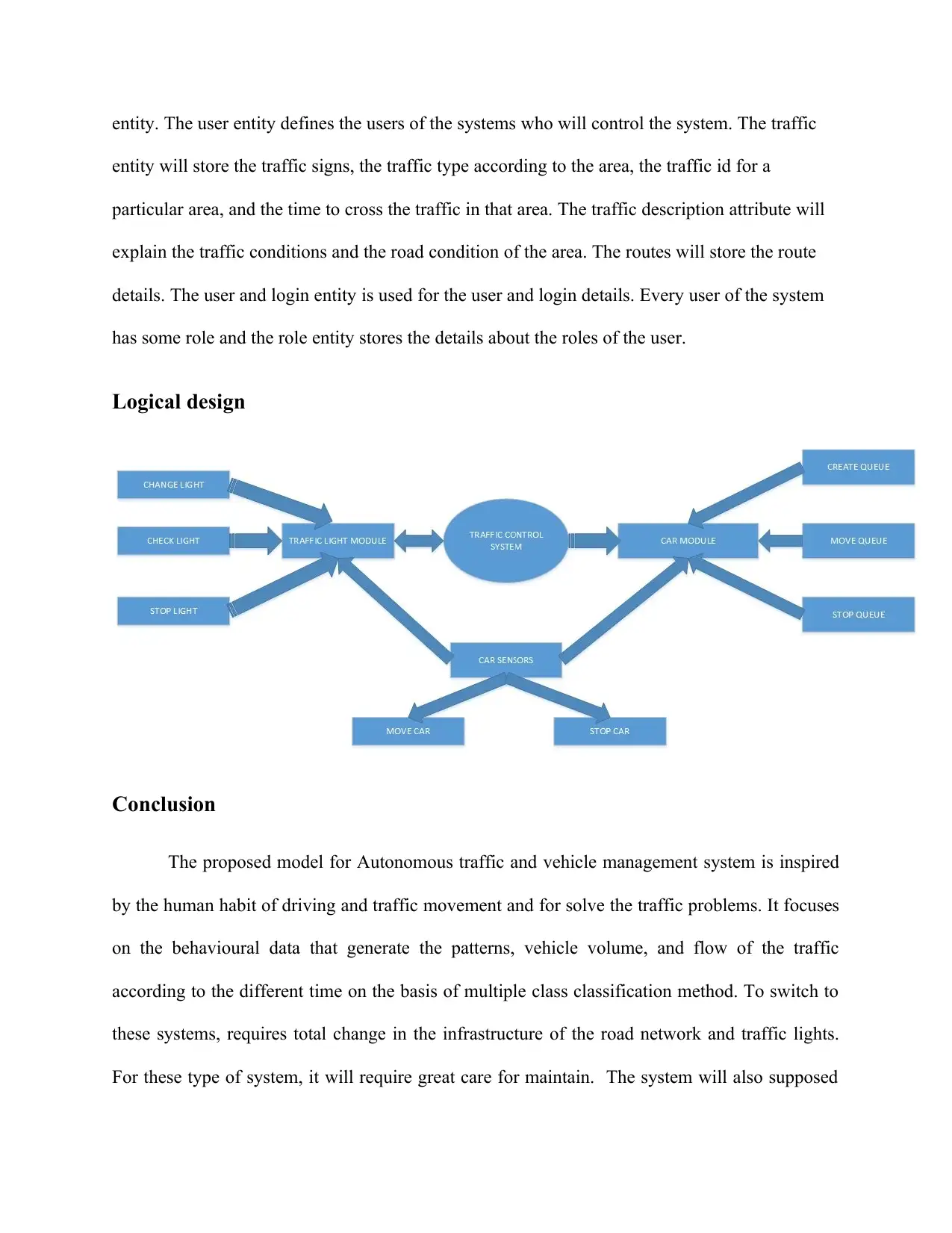
Logical design
Conclusion
The proposed model for Autonomous traffic and vehicle management system is inspired
by the human habit of driving and traffic movement and for solve the traffic problems. It focuses
on the behavioural data that generate the patterns, vehicle volume, and flow of the traffic
according to the different time on the basis of multiple class classification method. To switch to
these systems, requires total change in the infrastructure of the road network and traffic lights.
For these type of system, it will require great care for maintain. The system will also supposed
entity will store the traffic signs, the traffic type according to the area, the traffic id for a
particular area, and the time to cross the traffic in that area. The traffic description attribute will
explain the traffic conditions and the road condition of the area. The routes will store the route
details. The user and login entity is used for the user and login details. Every user of the system
has some role and the role entity stores the details about the roles of the user.
Logical design
Conclusion
The proposed model for Autonomous traffic and vehicle management system is inspired
by the human habit of driving and traffic movement and for solve the traffic problems. It focuses
on the behavioural data that generate the patterns, vehicle volume, and flow of the traffic
according to the different time on the basis of multiple class classification method. To switch to
these systems, requires total change in the infrastructure of the road network and traffic lights.
For these type of system, it will require great care for maintain. The system will also supposed
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
to detect any incident, anomalies and car’s number plate at the traffic crossings. It also provides
future extensions of lanes, route, decisions and prediction by analysing current and past events.
In conclusion, this proposal is to achieve less congestion and better traffic flow by using
knowledge based AI system which will predict the optimized pattern of system and routes for the
cars. These systems are adaptive in nature, so the concern for updatation in the system in
software level almost none. This will become the efficient, less time consuming and delay for the
individual too.
Recommendation
For building an effective AI based system requires good machine learning and accurate
prediction. Prediction is totally depends on the input data that will be analyse. The more the
accurate data the prediction will be more accurate. The volume of data is also directly related to
the output. Hence, larger data can provide a detail observation and optimisation. The system
should adaptable for handling more complex traffic network for more future implantation of
components such as increase in vehicles, roads or increase in road width. The integration of the
system into the network should be done after having a simulator based test.
future extensions of lanes, route, decisions and prediction by analysing current and past events.
In conclusion, this proposal is to achieve less congestion and better traffic flow by using
knowledge based AI system which will predict the optimized pattern of system and routes for the
cars. These systems are adaptive in nature, so the concern for updatation in the system in
software level almost none. This will become the efficient, less time consuming and delay for the
individual too.
Recommendation
For building an effective AI based system requires good machine learning and accurate
prediction. Prediction is totally depends on the input data that will be analyse. The more the
accurate data the prediction will be more accurate. The volume of data is also directly related to
the output. Hence, larger data can provide a detail observation and optimisation. The system
should adaptable for handling more complex traffic network for more future implantation of
components such as increase in vehicles, roads or increase in road width. The integration of the
system into the network should be done after having a simulator based test.
References
Barankova, I., Mikhailova, U., & Lukianov, G. (2016, May). Automated control system of a
factory railway transport based on ZigBee. In 2016 2nd International Conference on
Industrial Engineering, Applications and Manufacturing (ICIEAM) (pp. 1-5). IEEE.
Boesch, P. M., Ciari, F., & Axhausen, K. W. (2016). Autonomous vehicle fleet sizes required to
serve different levels of demand. Transportation Research Record, 2542(1), 111-119.
Bonnefon, J. F., Shariff, A., & Rahwan, I. (2016). The social dilemma of autonomous
vehicles. Science, 352(6293), 1573-1576.
Chowdhury, P. N., & Ray, T. C. (2017). An automated traffic signal management system
(Doctoral dissertation, BRAC University).
Fagnant, D. J., & Kockelman, K. (2015). Preparing a nation for autonomous vehicles:
opportunities, barriers and policy recommendations. Transportation Research Part A:
Policy and Practice, 77, 167-181.
Fagnant, D. J., & Kockelman, K. M. (2014). The travel and environmental implications of shared
autonomous vehicles, using agent-based model scenarios. Transportation Research Part
C: Emerging Technologies, 40, 1-13.
Fernandes Jr, G., Rodrigues, J. J., & Proenca Jr, M. L. (2015). Autonomous profile-based
anomaly detection system using principal component analysis and flow analysis. Applied
Soft Computing, 34, 513-525.
Barankova, I., Mikhailova, U., & Lukianov, G. (2016, May). Automated control system of a
factory railway transport based on ZigBee. In 2016 2nd International Conference on
Industrial Engineering, Applications and Manufacturing (ICIEAM) (pp. 1-5). IEEE.
Boesch, P. M., Ciari, F., & Axhausen, K. W. (2016). Autonomous vehicle fleet sizes required to
serve different levels of demand. Transportation Research Record, 2542(1), 111-119.
Bonnefon, J. F., Shariff, A., & Rahwan, I. (2016). The social dilemma of autonomous
vehicles. Science, 352(6293), 1573-1576.
Chowdhury, P. N., & Ray, T. C. (2017). An automated traffic signal management system
(Doctoral dissertation, BRAC University).
Fagnant, D. J., & Kockelman, K. (2015). Preparing a nation for autonomous vehicles:
opportunities, barriers and policy recommendations. Transportation Research Part A:
Policy and Practice, 77, 167-181.
Fagnant, D. J., & Kockelman, K. M. (2014). The travel and environmental implications of shared
autonomous vehicles, using agent-based model scenarios. Transportation Research Part
C: Emerging Technologies, 40, 1-13.
Fernandes Jr, G., Rodrigues, J. J., & Proenca Jr, M. L. (2015). Autonomous profile-based
anomaly detection system using principal component analysis and flow analysis. Applied
Soft Computing, 34, 513-525.
Gerla, M., Lee, E. K., Pau, G., & Lee, U. (2014, March). Internet of vehicles: From intelligent
grid to autonomous cars and vehicular clouds. In 2014 IEEE world forum on internet of
things (WF-IoT) (pp. 241-246). IEEE.
Gerla, M., Lee, E. K., Pau, G., & Lee, U. (2014, March). Internet of vehicles: From intelligent
grid to autonomous cars and vehicular clouds. In 2014 IEEE world forum on internet of
things (WF-IoT) (pp. 241-246). IEEE.
Heikoop, D. D., de Winter, J. C., van Arem, B., & Stanton, N. A. (2017). Acclimatizing to
automation: driver workload and stress during partially automated car following in real
traffic. Manuscript submitted.
Islam, M. R., Shahid, N. I., ul Karim, D. T., Al Mamun, A., & Rhaman, M. K. (2016, January).
An efficient algorithm for detecting traffic congestion and a framework for smart traffic
control system. In 2016 18th International Conference on Advanced Communication
Technology (ICACT) (pp. 802-807). IEEE.
Kammoun, H. M., Kallel, I., Casillas, J., Abraham, A., & Alimi, A. M. (2014). Adapt-Traf: An
adaptive multiagent road traffic management system based on hybrid ant-hierarchical
fuzzy model. Transportation Research Part C: Emerging Technologies, 42, 147-167.
Kim, K. D., & Kumar, P. R. (2014). An MPC-based approach to provable system-wide safety
and liveness of autonomous ground traffic. IEEE Transactions on Automatic
Control, 59(12), 3341-3356.
Kistan, T., Gardi, A., & Sabatini, R. (2018). Machine learning and cognitive ergonomics in air
traffic management: Recent developments and considerations for
certification. Aerospace, 5(4), 103.
grid to autonomous cars and vehicular clouds. In 2014 IEEE world forum on internet of
things (WF-IoT) (pp. 241-246). IEEE.
Gerla, M., Lee, E. K., Pau, G., & Lee, U. (2014, March). Internet of vehicles: From intelligent
grid to autonomous cars and vehicular clouds. In 2014 IEEE world forum on internet of
things (WF-IoT) (pp. 241-246). IEEE.
Heikoop, D. D., de Winter, J. C., van Arem, B., & Stanton, N. A. (2017). Acclimatizing to
automation: driver workload and stress during partially automated car following in real
traffic. Manuscript submitted.
Islam, M. R., Shahid, N. I., ul Karim, D. T., Al Mamun, A., & Rhaman, M. K. (2016, January).
An efficient algorithm for detecting traffic congestion and a framework for smart traffic
control system. In 2016 18th International Conference on Advanced Communication
Technology (ICACT) (pp. 802-807). IEEE.
Kammoun, H. M., Kallel, I., Casillas, J., Abraham, A., & Alimi, A. M. (2014). Adapt-Traf: An
adaptive multiagent road traffic management system based on hybrid ant-hierarchical
fuzzy model. Transportation Research Part C: Emerging Technologies, 42, 147-167.
Kim, K. D., & Kumar, P. R. (2014). An MPC-based approach to provable system-wide safety
and liveness of autonomous ground traffic. IEEE Transactions on Automatic
Control, 59(12), 3341-3356.
Kistan, T., Gardi, A., & Sabatini, R. (2018). Machine learning and cognitive ergonomics in air
traffic management: Recent developments and considerations for
certification. Aerospace, 5(4), 103.
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.
Kopardekar, P., Rios, J., Prevot, T., Johnson, M., Jung, J., & Robinson, J. E. (2016). Unmanned
aircraft system traffic management (UTM) concept of operations.
Krueger, R., Rashidi, T. H., & Rose, J. M. (2016). Preferences for shared autonomous
vehicles. Transportation research part C: emerging technologies, 69, 343-355.
Litkouhi, B. B., Wei, J., & Dolan, J. M. (2014). U.S. Patent No. 8,788,134. Washington, DC:
U.S. Patent and Trademark Office.
Menze, M., & Geiger, A. (2015). Object scene flow for autonomous vehicles. In Proceedings of
the IEEE Conference on Computer Vision and Pattern Recognition (pp. 3061-3070).
Payre, W., Cestac, J., Dang, N. T., Vienne, F., & Delhomme, P. (2017). Impact of training and
in-vehicle task performance on manual control recovery in an automated car.
Transportation research part F: traffic psychology and behaviour, 46, 216-227.
Shadrin, S. S., Varlamov, O. O., & Ivanov, A. M. (2017). Experimental autonomous road vehicle
with logical artificial intelligence. Journal of advanced transportation, 2017.
Shah, S., Dey, D., Lovett, C., & Kapoor, A. (2018). Airsim: High-fidelity visual and physical
simulation for autonomous vehicles. In Field and service robotics (pp. 621-635).
Springer, Cham.
Solanki, V. K., Katiyar, S., BhashkarSemwal, V., Dewan, P., Venkatasen, M., & Dey, N. (2016).
Advanced automated module for smart and secure city. Procedia Computer Science, 78,
367-374.
aircraft system traffic management (UTM) concept of operations.
Krueger, R., Rashidi, T. H., & Rose, J. M. (2016). Preferences for shared autonomous
vehicles. Transportation research part C: emerging technologies, 69, 343-355.
Litkouhi, B. B., Wei, J., & Dolan, J. M. (2014). U.S. Patent No. 8,788,134. Washington, DC:
U.S. Patent and Trademark Office.
Menze, M., & Geiger, A. (2015). Object scene flow for autonomous vehicles. In Proceedings of
the IEEE Conference on Computer Vision and Pattern Recognition (pp. 3061-3070).
Payre, W., Cestac, J., Dang, N. T., Vienne, F., & Delhomme, P. (2017). Impact of training and
in-vehicle task performance on manual control recovery in an automated car.
Transportation research part F: traffic psychology and behaviour, 46, 216-227.
Shadrin, S. S., Varlamov, O. O., & Ivanov, A. M. (2017). Experimental autonomous road vehicle
with logical artificial intelligence. Journal of advanced transportation, 2017.
Shah, S., Dey, D., Lovett, C., & Kapoor, A. (2018). Airsim: High-fidelity visual and physical
simulation for autonomous vehicles. In Field and service robotics (pp. 621-635).
Springer, Cham.
Solanki, V. K., Katiyar, S., BhashkarSemwal, V., Dewan, P., Venkatasen, M., & Dey, N. (2016).
Advanced automated module for smart and secure city. Procedia Computer Science, 78,
367-374.
1 out of 17
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
© 2024 | Zucol Services PVT LTD | All rights reserved.