La Trobe University ELE5PRB: MATLAB Simulation of Brick Escalator
VerifiedAdded on 2023/06/08
|12
|1924
|239
Homework Assignment
AI Summary
This assignment focuses on simulating and controlling the motion of a brick escalator using MATLAB and a PID controller. The goal is to move a brick cart from a base position to a specified altitude by controlling the escalator engine. The simulation is implemented by modifying the trainsim.m code, incorporating specific environmental variables and initial conditions such as the mass of the cart (200 kg), inclination angle (45 degrees), and the absence of brakes. The PID controller coefficients (Kp, Ki, Kd) are determined through trial and error to meet the specified conditions, including velocity and acceleration limits. The results demonstrate the cart reaching its destination in approximately 15 seconds, with the velocity and acceleration within the defined constraints. The MATLAB code, along with detailed comments, is included in the report. The conclusion highlights the successful implementation of the PID controller for controlling the motion of the brick cart and emphasizes the importance of PID controllers in dynamic systems.

Running head: BRICK ESCALATOR CONTROLLER
ELE5PRB MATLAB ASSIGNMENT
BRICK ESCALATOR CONTROLLER
Name of the Student
Student ID
Date
ELE5PRB MATLAB ASSIGNMENT
BRICK ESCALATOR CONTROLLER
Name of the Student
Student ID
Date
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
1BRICK ESCALATOR CONTROLLER
Table of Contents
Introduction:...............................................................................................................................3
Aim:............................................................................................................................................3
Method:......................................................................................................................................3
MATLAB code:......................................................................................................................6
Result and Discussion:...............................................................................................................8
Plot:.........................................................................................................................................9
Conclusion:................................................................................................................................9
References:...............................................................................................................................11
Table of Contents
Introduction:...............................................................................................................................3
Aim:............................................................................................................................................3
Method:......................................................................................................................................3
MATLAB code:......................................................................................................................6
Result and Discussion:...............................................................................................................8
Plot:.........................................................................................................................................9
Conclusion:................................................................................................................................9
References:...............................................................................................................................11
2BRICK ESCALATOR CONTROLLER
Introduction:
PID control algorithm is used in most advanced motion control application for
increased accuracy and efficiency. There are three control loops that can be controlled using a
PID controller which are torque, velocity and position respectively. In vehicles which do not
have the electronic controls do not have the linear motion though same power is transferred
independently to the wheels. The non-linear motion of the vehicle is caused mainly by the
mechanical vibrations and the difference in the surfaces in which the vehicle operates. Hence,
for minimizing deviation of vehicle from straight direction a closed loop PID controller that
changes the power input the motors of the vehicle based on the change in their rotation [1].
Basically, the PID controller minimizes the gap between the measured power and the desired
power to the wheels to maintain linear motion by changing the control inputs of the system.
In this assignment, the vehicle is a brick escalator which moves in an incline plane from base
to about 10 meters of height in full loaded condition [1]. The angle of inclination of the plane
is about 45 degrees and the cart is moved through the rails installed in the inclined plane. The
PID controller is installed in an Arduino board and the controller settings as specified below
is written in MATLAB environment as given in the later sections [2]. The Arduino board is
installed in the brick cart and the total weight of the cart is 200 kgs.
Aim:
The aim of the assignment is to move the loaded brick cart from base through the rails
in the inclined plane to the top of the plane which is 10 meters above the ground. PID control
system must be employed to control the movement of the brick cart.
Introduction:
PID control algorithm is used in most advanced motion control application for
increased accuracy and efficiency. There are three control loops that can be controlled using a
PID controller which are torque, velocity and position respectively. In vehicles which do not
have the electronic controls do not have the linear motion though same power is transferred
independently to the wheels. The non-linear motion of the vehicle is caused mainly by the
mechanical vibrations and the difference in the surfaces in which the vehicle operates. Hence,
for minimizing deviation of vehicle from straight direction a closed loop PID controller that
changes the power input the motors of the vehicle based on the change in their rotation [1].
Basically, the PID controller minimizes the gap between the measured power and the desired
power to the wheels to maintain linear motion by changing the control inputs of the system.
In this assignment, the vehicle is a brick escalator which moves in an incline plane from base
to about 10 meters of height in full loaded condition [1]. The angle of inclination of the plane
is about 45 degrees and the cart is moved through the rails installed in the inclined plane. The
PID controller is installed in an Arduino board and the controller settings as specified below
is written in MATLAB environment as given in the later sections [2]. The Arduino board is
installed in the brick cart and the total weight of the cart is 200 kgs.
Aim:
The aim of the assignment is to move the loaded brick cart from base through the rails
in the inclined plane to the top of the plane which is 10 meters above the ground. PID control
system must be employed to control the movement of the brick cart.
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
3BRICK ESCALATOR CONTROLLER
Method:
The PID controller is designed in the Arduino board installed in the brick cart that
provides signals and supply voltage which drives the motors of the engine coupled with the
cart wheels. Hence, at first the hardware design of the PID controller components are is
installed in the Arduino board followed by electric motor with supply installations in the cart
[2]. Then the MATLAB programming is done in some capable machine and the motion of the
cart will be controlled remotely via some signal transmitter installed in the machine and
signal sensors installed the cart and work with the hardware system in synchronism.
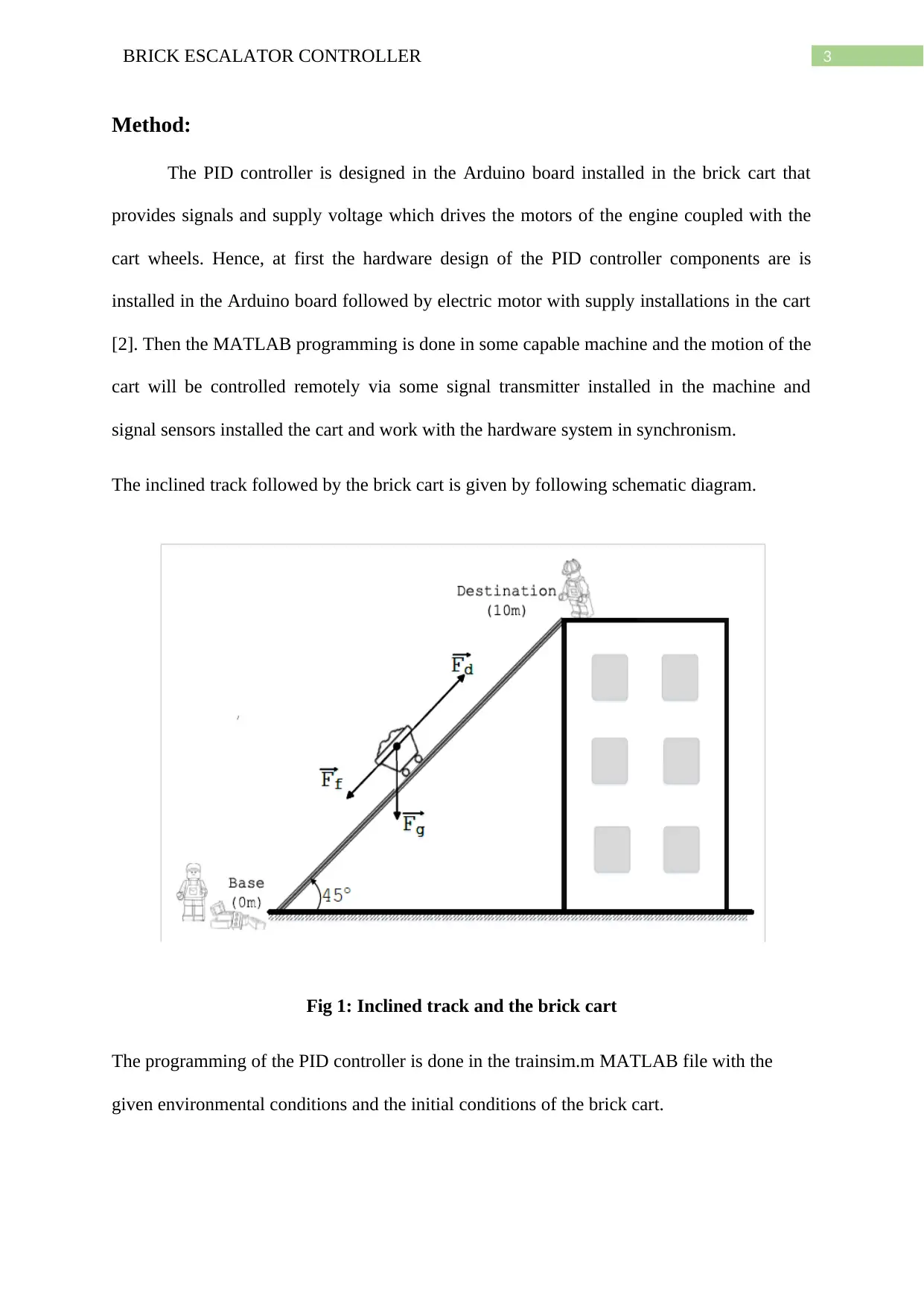
The inclined track followed by the brick cart is given by following schematic diagram.
Fig 1: Inclined track and the brick cart
The programming of the PID controller is done in the trainsim.m MATLAB file with the
given environmental conditions and the initial conditions of the brick cart.
Method:
The PID controller is designed in the Arduino board installed in the brick cart that
provides signals and supply voltage which drives the motors of the engine coupled with the
cart wheels. Hence, at first the hardware design of the PID controller components are is
installed in the Arduino board followed by electric motor with supply installations in the cart
[2]. Then the MATLAB programming is done in some capable machine and the motion of the
cart will be controlled remotely via some signal transmitter installed in the machine and
signal sensors installed the cart and work with the hardware system in synchronism.
The inclined track followed by the brick cart is given by following schematic diagram.
Fig 1: Inclined track and the brick cart
The programming of the PID controller is done in the trainsim.m MATLAB file with the
given environmental conditions and the initial conditions of the brick cart.
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
4BRICK ESCALATOR CONTROLLER
1. The mass of the system in full loaded condition (with bricks) is m=200 kg and moved
in full loaded condition.
2. Initially the cart has no motion and stationary at the base i.e. at height h = 0 m.
3. Destination height is h = 10 m.
4. Inclination angle is θ = 45 degrees.
5. No brakes are installed in the cart or the escalator, braking is done with the help of
gravity and the controller installed in the engine.
6. After reaching the destination the cart should not go beyond 0.1 m of the ground.
7. The acceleration of the cart should be below 0.5 ms^(-2) and the velocity of the cart
must not exceed 2 m/s second to avoid damage to the bricks.
8. The maximum driving force that can be delivered by the engine cart is 10 kN.
9. The dynamic friction coefficient of the rail is 1000 N-s/m
Hence, the force balancing equation of the brick is
Fnet(t) = Fd(t) - Ff(t) – Fg(t)
Here, Fd(t) = driving force of the cart engine = Kpe(t) + KI eI(t) + KD eD(t)
Where, e(t) = error in driving force in proportional control part at time t.
eI(t) = error in driving force in integral control part at time t.
eD(t) = error in driving force in derivative control part at time t.
Kp, KI and KD are the proportional, integral and derivative constants which are needed to be
determined to move the cart at the top of inclined plane satisfying the conditions given above.
Ff(t) = the dynamic friction force acting on the cart opposite of its motion = bv(t) = 1000v(t).
v(t) = velocity of the cart at time t.
1. The mass of the system in full loaded condition (with bricks) is m=200 kg and moved
in full loaded condition.
2. Initially the cart has no motion and stationary at the base i.e. at height h = 0 m.
3. Destination height is h = 10 m.
4. Inclination angle is θ = 45 degrees.
5. No brakes are installed in the cart or the escalator, braking is done with the help of
gravity and the controller installed in the engine.
6. After reaching the destination the cart should not go beyond 0.1 m of the ground.
7. The acceleration of the cart should be below 0.5 ms^(-2) and the velocity of the cart
must not exceed 2 m/s second to avoid damage to the bricks.
8. The maximum driving force that can be delivered by the engine cart is 10 kN.
9. The dynamic friction coefficient of the rail is 1000 N-s/m
Hence, the force balancing equation of the brick is
Fnet(t) = Fd(t) - Ff(t) – Fg(t)
Here, Fd(t) = driving force of the cart engine = Kpe(t) + KI eI(t) + KD eD(t)
Where, e(t) = error in driving force in proportional control part at time t.
eI(t) = error in driving force in integral control part at time t.
eD(t) = error in driving force in derivative control part at time t.
Kp, KI and KD are the proportional, integral and derivative constants which are needed to be
determined to move the cart at the top of inclined plane satisfying the conditions given above.
Ff(t) = the dynamic friction force acting on the cart opposite of its motion = bv(t) = 1000v(t).
v(t) = velocity of the cart at time t.

5BRICK ESCALATOR CONTROLLER
Fg(t) = force due to gravity acting opposite of the carts moving direction = m∗g∗sin(θ)
Fg(t) = force due to gravity acting opposite of the carts moving direction = m∗g∗sin(θ)
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
6BRICK ESCALATOR CONTROLLER
MATLAB code:
function [error,F_drive] = trainsim(Kp,Ki,Kd)
%% PID controller coefficients
% Kp = proportional
% Ki = integral
% Kd = derivative
% 350 50 10 (chosen PID values)
%% physical parameters
m = 200; % mass of train in kgs
b = 1000; % coefficient of dynamic friction in N-s/m
d = 10; % distance between point A and B
alpha = 45; % incline angle (degrees)
g = 9.8; % acceleration due to gravity
F_reaction= m*g*sind(alpha);
%% simulation time
T = 50; % simulation time
dt = 0.01; % simulation resolution
N = T/dt +1;% number of samples
%% simulation variables
t=0:dt:T; % time vectors
v=zeros(1,N); % velocity
a=zeros(1,N); % acceleration
x=zeros(1,N); % distance traveled
F_net=zeros(1,N);% net force
e = d*ones(1,N); % error
eI=0;
MATLAB code:
function [error,F_drive] = trainsim(Kp,Ki,Kd)
%% PID controller coefficients
% Kp = proportional
% Ki = integral
% Kd = derivative
% 350 50 10 (chosen PID values)
%% physical parameters
m = 200; % mass of train in kgs
b = 1000; % coefficient of dynamic friction in N-s/m
d = 10; % distance between point A and B
alpha = 45; % incline angle (degrees)
g = 9.8; % acceleration due to gravity
F_reaction= m*g*sind(alpha);
%% simulation time
T = 50; % simulation time
dt = 0.01; % simulation resolution
N = T/dt +1;% number of samples
%% simulation variables
t=0:dt:T; % time vectors
v=zeros(1,N); % velocity
a=zeros(1,N); % acceleration
x=zeros(1,N); % distance traveled
F_net=zeros(1,N);% net force
e = d*ones(1,N); % error
eI=0;
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
7BRICK ESCALATOR CONTROLLER
for(n=2:N)
%% Process
a(n) = F_net(n-1)/m; % train acceleration
v(n) = v(n-1) + 0.5*(a(n-1)+a(n))*dt;% train velocity
x(n) = x(n-1) + 0.5*(v(n-1)+v(n))*dt;% distance traveled
%% Feedback error
e(n) = d-x(n); % end value indicates the amount by which the cart overshoots final height
%% Control
format short
eI = eI + 0.5*(e(n)+e(n-1))*dt; % integral
eD = (e(n)-e(n-1))/dt; % derivative
F_drive = Kp*e(n) + Ki*eI + Kd*eD; % driving force in Newton
F_friction = b*v(n-1); % friction force in Newton
F_net(n) = F_drive - F_friction - F_reaction;% net force in Newton
end
error = e(end);
figure
plot(t,a,'b-',t,v,'k-',t,x,'r-')
xlim([0,15])
ylabel('dynamic position of distance,velocity and acceleration');
xlabel('time (s)');
legend('acceleration in m/s^2','velocity in m/s','distance in m')
title('Dynamic characteristics of brick cart at time t')
grid on
The chosen values of the coefficients KP, KD and KI are calculated by trial error method such
that it satisfies all the environmental and boundary conditions of carts velocity, position,
acceleration.
for(n=2:N)
%% Process
a(n) = F_net(n-1)/m; % train acceleration
v(n) = v(n-1) + 0.5*(a(n-1)+a(n))*dt;% train velocity
x(n) = x(n-1) + 0.5*(v(n-1)+v(n))*dt;% distance traveled
%% Feedback error
e(n) = d-x(n); % end value indicates the amount by which the cart overshoots final height
%% Control
format short
eI = eI + 0.5*(e(n)+e(n-1))*dt; % integral
eD = (e(n)-e(n-1))/dt; % derivative
F_drive = Kp*e(n) + Ki*eI + Kd*eD; % driving force in Newton
F_friction = b*v(n-1); % friction force in Newton
F_net(n) = F_drive - F_friction - F_reaction;% net force in Newton
end
error = e(end);
figure
plot(t,a,'b-',t,v,'k-',t,x,'r-')
xlim([0,15])
ylabel('dynamic position of distance,velocity and acceleration');
xlabel('time (s)');
legend('acceleration in m/s^2','velocity in m/s','distance in m')
title('Dynamic characteristics of brick cart at time t')
grid on
The chosen values of the coefficients KP, KD and KI are calculated by trial error method such
that it satisfies all the environmental and boundary conditions of carts velocity, position,
acceleration.
8BRICK ESCALATOR CONTROLLER
Result and Discussion:
The modified trainsim.m file is executed in the MATLAB command window and the
results are given below.
>> [error,F_drive] = trainsim(350,35,10)
error =
-0.0011
F_drive =
1.3857e+03
Result and Discussion:
The modified trainsim.m file is executed in the MATLAB command window and the
results are given below.
>> [error,F_drive] = trainsim(350,35,10)
error =
-0.0011
F_drive =
1.3857e+03
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
9BRICK ESCALATOR CONTROLLER
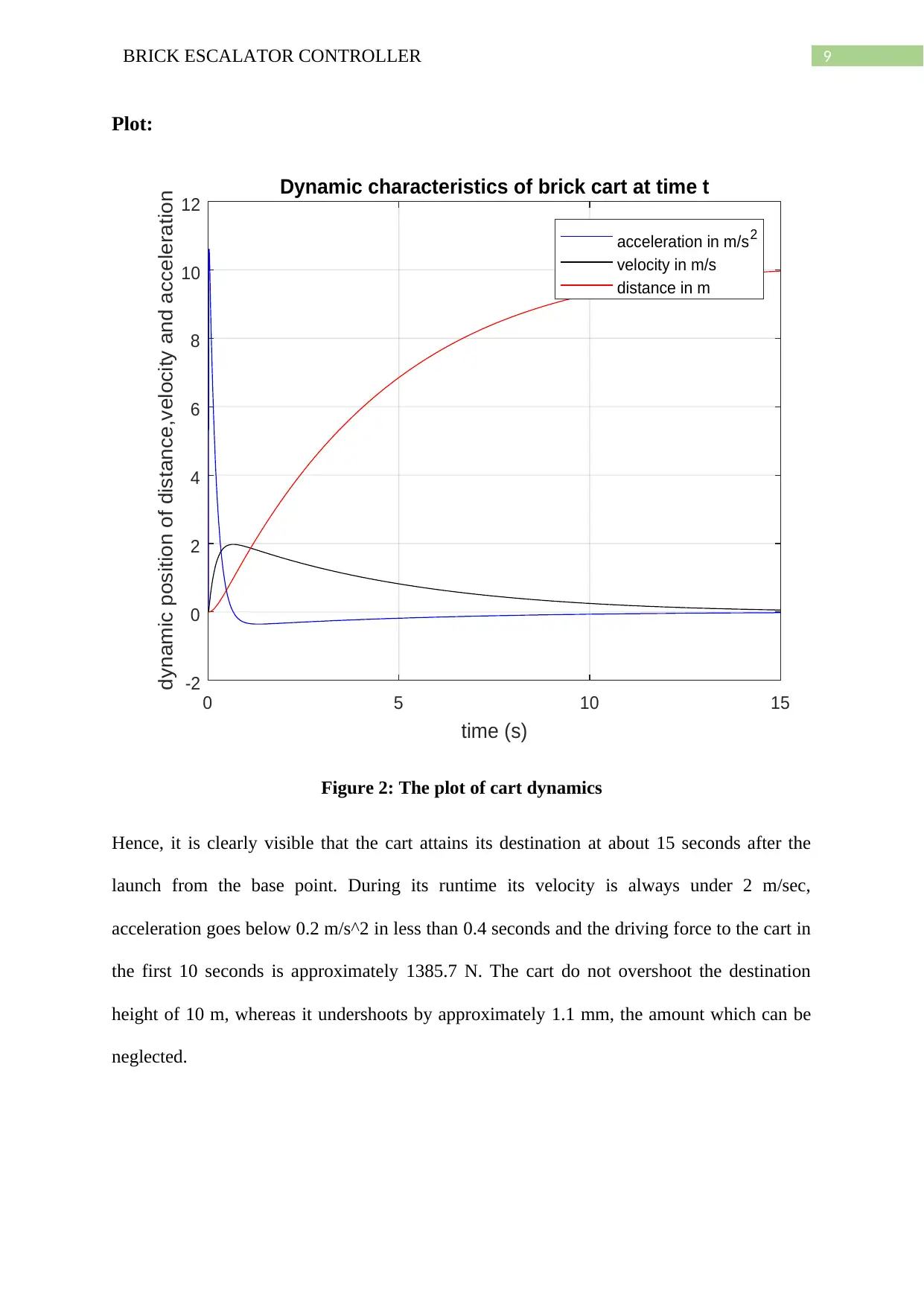
Plot:
0 5 10 15
time (s)
-2
0
2
4
6
8
10
12
dynamic position of distance,velocity and acceleration Dynamic characteristics of brick cart at time t
acceleration in m/s2
velocity in m/s
distance in m
Figure 2: The plot of cart dynamics
Hence, it is clearly visible that the cart attains its destination at about 15 seconds after the
launch from the base point. During its runtime its velocity is always under 2 m/sec,
acceleration goes below 0.2 m/s^2 in less than 0.4 seconds and the driving force to the cart in
the first 10 seconds is approximately 1385.7 N. The cart do not overshoot the destination
height of 10 m, whereas it undershoots by approximately 1.1 mm, the amount which can be
neglected.
Plot:
0 5 10 15
time (s)
-2
0
2
4
6
8
10
12
dynamic position of distance,velocity and acceleration Dynamic characteristics of brick cart at time t
acceleration in m/s2
velocity in m/s
distance in m
Figure 2: The plot of cart dynamics
Hence, it is clearly visible that the cart attains its destination at about 15 seconds after the
launch from the base point. During its runtime its velocity is always under 2 m/sec,
acceleration goes below 0.2 m/s^2 in less than 0.4 seconds and the driving force to the cart in
the first 10 seconds is approximately 1385.7 N. The cart do not overshoot the destination
height of 10 m, whereas it undershoots by approximately 1.1 mm, the amount which can be
neglected.
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
10BRICK ESCALATOR CONTROLLER
Conclusion:
Hence, the MATLAB programming of the PID controller settings is performed
appropriately as most of the environmental and brick cart’s dynamic conditions are met and it
is proved that the cart can be successfully delivered in its destination with the calculated
coefficients of PID controller. Although, the acceleration exceeds its limitation of 0.2 m/s^2
for the first 0.4 sec (approx.), it can be assured that the time interval is much smaller to
execute significant disturbance in the dynamics that can partially unload the brick cart. The
initial acceleration for sufficiently small time interval is necessary to provide the driving
force that will drive the cart in its later course. Therefore, it can be concluded that PID
controllers can be used to control the motion of dynamic bodies for better performance and
outcomes.
Conclusion:
Hence, the MATLAB programming of the PID controller settings is performed
appropriately as most of the environmental and brick cart’s dynamic conditions are met and it
is proved that the cart can be successfully delivered in its destination with the calculated
coefficients of PID controller. Although, the acceleration exceeds its limitation of 0.2 m/s^2
for the first 0.4 sec (approx.), it can be assured that the time interval is much smaller to
execute significant disturbance in the dynamics that can partially unload the brick cart. The
initial acceleration for sufficiently small time interval is necessary to provide the driving
force that will drive the cart in its later course. Therefore, it can be concluded that PID
controllers can be used to control the motion of dynamic bodies for better performance and
outcomes.
11BRICK ESCALATOR CONTROLLER
References:
[1] "Drive with PID Control - MATLAB & Simulink Example - MathWorks India",
In.mathworks.com, 2018. [Online]. Available:
https://in.mathworks.com/help/supportpkg/arduino/examples/drive-with-pid-
control.html?prodcode=SL&?prodcode=SL. [Accessed: 04- Sep- 2018].
[2] P. Pal and R. Dey, "Optimal PID Controller Design for Speed Control of a Separately
Excited DC Motor: A Firefly Based Optimization Approach", The International
Journal of Soft Computing, Mathematics and Control, vol. 4, no. 4, pp. 39-48, 2015.
References:
[1] "Drive with PID Control - MATLAB & Simulink Example - MathWorks India",
In.mathworks.com, 2018. [Online]. Available:
https://in.mathworks.com/help/supportpkg/arduino/examples/drive-with-pid-
control.html?prodcode=SL&?prodcode=SL. [Accessed: 04- Sep- 2018].
[2] P. Pal and R. Dey, "Optimal PID Controller Design for Speed Control of a Separately
Excited DC Motor: A Firefly Based Optimization Approach", The International
Journal of Soft Computing, Mathematics and Control, vol. 4, no. 4, pp. 39-48, 2015.
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
1 out of 12
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.