Capstone Project for Engineering
Investigating the functioning of a robotic arm and its response to a surgeon's command, including problem statement, background study, research questions, methodology, and risk assessment.
36 Pages5676 Words429 Views
Added on 2023-04-04
About This Document
This document discusses the Capstone Project for Engineering, focusing on the development of a robotic scrub nurse. It includes an executive summary, research design, background and literature review, mechanical robot designing, challenges of robotic scrub nurses in hospitals, and more. Find study material and solved assignments on Desklib.
Capstone Project for Engineering
Investigating the functioning of a robotic arm and its response to a surgeon's command, including problem statement, background study, research questions, methodology, and risk assessment.
Added on 2023-04-04
ShareRelated Documents
CAPSTONE PROJECT FOR ENGINEERING 1
CAPSTONE PROJECT FOR ENGINEERING
Authors Name/s per 1st Affiliation (Author)
Dept. name of the organization
Name of organization, acronyms acceptable
City, Country
mail address
Authors Name/s per 2nd Affiliation (Author)
Dept. name of the organization
Name of organization, acronyms acceptable
City, Country
e-mail addres
CAPSTONE PROJECT FOR ENGINEERING
Authors Name/s per 1st Affiliation (Author)
Dept. name of the organization
Name of organization, acronyms acceptable
City, Country
mail address
Authors Name/s per 2nd Affiliation (Author)
Dept. name of the organization
Name of organization, acronyms acceptable
City, Country
e-mail addres
CAPSTONE PROJECT FOR ENGINEERING 2
Executive summary
A robotic scrub nurse is also called delivery scrub nurses was invented in order to help
human scrub nurses as it can be sent to give some instrument to the nurse . The system
developed in this technology was nicknamed Quirubot which is programmed with a speech
recognition module to identify the type of surgical instrument required. The Quirino traces the
equipment in the storage tray by the use the computer visions and pattern recognition and placed
it on the interchange try where the human scrub nurse will use the equipment. Also, the
implementation and manipulation of surgical instruments have been achieved by the
electromagnetic gripper that picks and places them where required.
A new electrically modified connector that has been incorporated in the Fanuc LR mate
200Ib robot, so as to increase their gripping ability. Up to today, almost 27 surgical tools can be
clearly identified by the Quirubot and more than 82 instructions in speech form. The system is
advantaged since it has been tested and implemented by a group of experts and the scrub nurses
in an open place where experiments performance on robots is done that is the robotic labs and an
operating room.
Executive summary
A robotic scrub nurse is also called delivery scrub nurses was invented in order to help
human scrub nurses as it can be sent to give some instrument to the nurse . The system
developed in this technology was nicknamed Quirubot which is programmed with a speech
recognition module to identify the type of surgical instrument required. The Quirino traces the
equipment in the storage tray by the use the computer visions and pattern recognition and placed
it on the interchange try where the human scrub nurse will use the equipment. Also, the
implementation and manipulation of surgical instruments have been achieved by the
electromagnetic gripper that picks and places them where required.
A new electrically modified connector that has been incorporated in the Fanuc LR mate
200Ib robot, so as to increase their gripping ability. Up to today, almost 27 surgical tools can be
clearly identified by the Quirubot and more than 82 instructions in speech form. The system is
advantaged since it has been tested and implemented by a group of experts and the scrub nurses
in an open place where experiments performance on robots is done that is the robotic labs and an
operating room.

CAPSTONE PROJECT FOR ENGINEERING 3
TABLE OF CONTENT
Executive summary.........................................................................................................................2
TABLE OF CONTENT...................................................................................................................3
Table of figures................................................................................................................................3
Statement of the problem.................................................................................................................4
Research design...............................................................................................................................5
Background and literature review....................................................................................................5
Mechanical Robot designing......................................................................................................10
Controller...................................................................................................................................12
Actuator......................................................................................................................................16
Feasibility or proof of concept.......................................................................................................21
Challenges of Robotic Scrub Nurses in hospital........................................................................21
Privacy Issues.........................................................................................................................21
Attribution of Liability Issues................................................................................................21
Employment issues.................................................................................................................22
Safety and security issues.......................................................................................................22
The outcome of using Robotic Scrub Nurse..............................................................................22
Alternative..............................................................................................................................22
Assessments............................................................................................................................22
Conclusion.....................................................................................................................................23
Bibliography..................................................................................................................................24
Appendices....................................................................................................................................27
Table of figures
Figure 1: Showing the concept of the robotic Scrub nurse ............................................................6
Figure 2: Showing demonstrates the robotic scrub nurse that is being arranged ...........................7
Figure 3: Showing arm of a robotic scrub nurse giving medicine to a doctor ...............................8
TABLE OF CONTENT
Executive summary.........................................................................................................................2
TABLE OF CONTENT...................................................................................................................3
Table of figures................................................................................................................................3
Statement of the problem.................................................................................................................4
Research design...............................................................................................................................5
Background and literature review....................................................................................................5
Mechanical Robot designing......................................................................................................10
Controller...................................................................................................................................12
Actuator......................................................................................................................................16
Feasibility or proof of concept.......................................................................................................21
Challenges of Robotic Scrub Nurses in hospital........................................................................21
Privacy Issues.........................................................................................................................21
Attribution of Liability Issues................................................................................................21
Employment issues.................................................................................................................22
Safety and security issues.......................................................................................................22
The outcome of using Robotic Scrub Nurse..............................................................................22
Alternative..............................................................................................................................22
Assessments............................................................................................................................22
Conclusion.....................................................................................................................................23
Bibliography..................................................................................................................................24
Appendices....................................................................................................................................27
Table of figures
Figure 1: Showing the concept of the robotic Scrub nurse ............................................................6
Figure 2: Showing demonstrates the robotic scrub nurse that is being arranged ...........................7
Figure 3: Showing arm of a robotic scrub nurse giving medicine to a doctor ...............................8
CAPSTONE PROJECT FOR ENGINEERING 4
Statement of the problem
The development of robots has increased attention on the aspect of artificial intelligence.
Particularly, an investigation into the physical between the robots and their external environment
has been the focus of most studies. Ideally, it is important to study robots because they present
one of the most challenging aspects of artificial intelligence for people, especially the building
process. There are many ways of building a robotic arm [1]. However, people have not been able
to grasp the methods and what is required to build a functioning robotic arm. In most cases,
robots are built to follow commands their surgeons. Therefore, this project is focused on building
a robotic arm via the Arduino controller. The aim is to understand the processes involved in the
physical interface, where the robot perceives its environment and reacts accordingly. For
instance, when the surgeon gives the command to pass the specific medical equipment, robotic
arm pick up that equipment by using voice command, image processing and pass it to the
surgeon. Understanding the process in which the robot reacts to commands will enhance an
understanding of how robots perceive their physical environment [2].
Research design
The research deals with the procedure of building a robotic scrub nurse. Hence, the research
questions that will help in conducting the study are:
1. How does the robot react to its external environment so as enable it to respond to a
command?
2. What is the physical interface involved in robot system?
3. What are the processes involved in building a robotic arm using an Arduino controller?
Background and literature review
Robotic is a branch of engineering and science that involves the inter alia, mechanical,
electrical and computer science engineering. This invention in the technological field
advancement deals with connecting perceptions to action and the place of application of that
connection to be applied as intelligent, then the artificial intelligence (AI) plays a fundamental
role in robotics [3]. This technology has grown to be the professional and personal aspect of
human lives. When mechatronics, industrial robots and futuristic humanoids are considered, the
human endeavors are seen as the extension of the robotic aspect of technology. This aspect has
been focused for over the years, many researchers have tried to research the working capability
of robots, their building process and the relationship that exist between them and their physical
environment.
Many studies have been conducted to determine the field of robots. Most of them
conclude that the ability of the robot to grasp objects is the main process and its understanding
needs an examination of the processes applied to improve robot scrub nurse and how it responds
to command. However, they work done by their own but they respond to commands of the
surgeon to assist them to carry out some critical surgeries [4].
Statement of the problem
The development of robots has increased attention on the aspect of artificial intelligence.
Particularly, an investigation into the physical between the robots and their external environment
has been the focus of most studies. Ideally, it is important to study robots because they present
one of the most challenging aspects of artificial intelligence for people, especially the building
process. There are many ways of building a robotic arm [1]. However, people have not been able
to grasp the methods and what is required to build a functioning robotic arm. In most cases,
robots are built to follow commands their surgeons. Therefore, this project is focused on building
a robotic arm via the Arduino controller. The aim is to understand the processes involved in the
physical interface, where the robot perceives its environment and reacts accordingly. For
instance, when the surgeon gives the command to pass the specific medical equipment, robotic
arm pick up that equipment by using voice command, image processing and pass it to the
surgeon. Understanding the process in which the robot reacts to commands will enhance an
understanding of how robots perceive their physical environment [2].
Research design
The research deals with the procedure of building a robotic scrub nurse. Hence, the research
questions that will help in conducting the study are:
1. How does the robot react to its external environment so as enable it to respond to a
command?
2. What is the physical interface involved in robot system?
3. What are the processes involved in building a robotic arm using an Arduino controller?
Background and literature review
Robotic is a branch of engineering and science that involves the inter alia, mechanical,
electrical and computer science engineering. This invention in the technological field
advancement deals with connecting perceptions to action and the place of application of that
connection to be applied as intelligent, then the artificial intelligence (AI) plays a fundamental
role in robotics [3]. This technology has grown to be the professional and personal aspect of
human lives. When mechatronics, industrial robots and futuristic humanoids are considered, the
human endeavors are seen as the extension of the robotic aspect of technology. This aspect has
been focused for over the years, many researchers have tried to research the working capability
of robots, their building process and the relationship that exist between them and their physical
environment.
Many studies have been conducted to determine the field of robots. Most of them
conclude that the ability of the robot to grasp objects is the main process and its understanding
needs an examination of the processes applied to improve robot scrub nurse and how it responds
to command. However, they work done by their own but they respond to commands of the
surgeon to assist them to carry out some critical surgeries [4].
CAPSTONE PROJECT FOR ENGINEERING 5
The RSN is the type of robots that offers auxiliary supports that has some level of
autonomy and cognitive capabilities. For instance, Kochan et al invented Penelope which takes
and return the surgical instruments and the voice controls its actions. Another invention by
Carpintero et al. is a voice-controlled robot but this one relies on the computer vision technique
to recognize, deliver and retrieve the instruments of surgery [5]. The DARPA-sponsored Trauma
Pod (TP) project states that the robotic TP system was invented and its ability shown by
performing the selected surgical procedure on a patient phantom. The da Vinci robot was
serviced by another robot in a demo, back in 2007.
The team of students at Purdue has achieved nice results. They commence their studies in
2007 and their working prototype they present it in 2011. A more recent research document
published involves the details of technical of the system. Which is called A Cyber-Physical
Management System for Delivering and Monitoring Surgical Instruments in the OR".Last
research on the robots of surgical extender involves an assistive robot for an object includes an
assistive robot for object picking, haptic feedback controlled robots, such as SOFIE or Agovic’s
robots." The Japanese have also developed a prototype system.
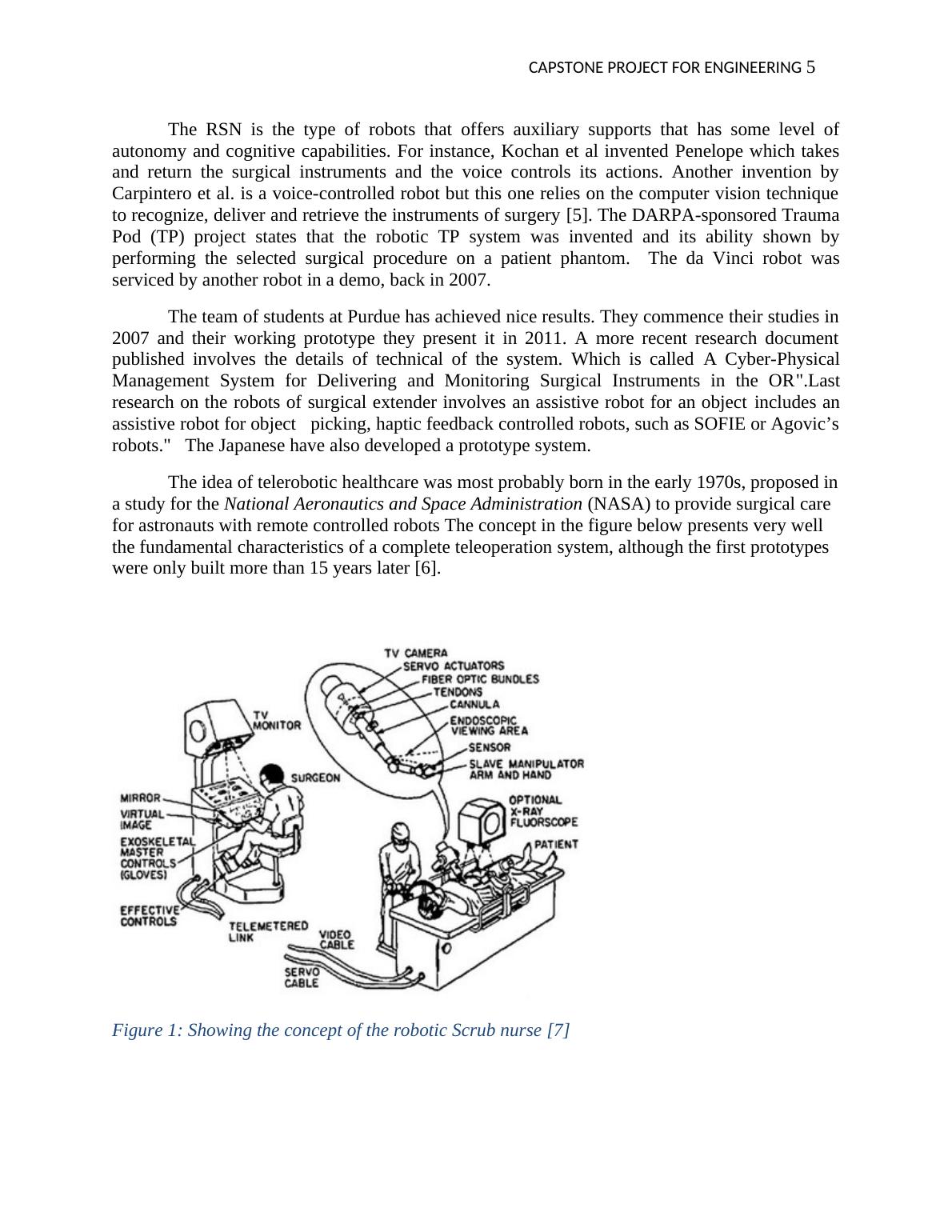
The idea of telerobotic healthcare was most probably born in the early 1970s, proposed in
a study for the National Aeronautics and Space Administration (NASA) to provide surgical care
for astronauts with remote controlled robots The concept in the figure below presents very well
the fundamental characteristics of a complete teleoperation system, although the first prototypes
were only built more than 15 years later [6].
Figure 1: Showing the concept of the robotic Scrub nurse [7]
The RSN is the type of robots that offers auxiliary supports that has some level of
autonomy and cognitive capabilities. For instance, Kochan et al invented Penelope which takes
and return the surgical instruments and the voice controls its actions. Another invention by
Carpintero et al. is a voice-controlled robot but this one relies on the computer vision technique
to recognize, deliver and retrieve the instruments of surgery [5]. The DARPA-sponsored Trauma
Pod (TP) project states that the robotic TP system was invented and its ability shown by
performing the selected surgical procedure on a patient phantom. The da Vinci robot was
serviced by another robot in a demo, back in 2007.
The team of students at Purdue has achieved nice results. They commence their studies in
2007 and their working prototype they present it in 2011. A more recent research document
published involves the details of technical of the system. Which is called A Cyber-Physical
Management System for Delivering and Monitoring Surgical Instruments in the OR".Last
research on the robots of surgical extender involves an assistive robot for an object includes an
assistive robot for object picking, haptic feedback controlled robots, such as SOFIE or Agovic’s
robots." The Japanese have also developed a prototype system.
The idea of telerobotic healthcare was most probably born in the early 1970s, proposed in
a study for the National Aeronautics and Space Administration (NASA) to provide surgical care
for astronauts with remote controlled robots The concept in the figure below presents very well
the fundamental characteristics of a complete teleoperation system, although the first prototypes
were only built more than 15 years later [6].
Figure 1: Showing the concept of the robotic Scrub nurse [7]
CAPSTONE PROJECT FOR ENGINEERING 6
The establishment of careful mechanical technology is in the advancement of the
automated arm. This is an exhaustive audit of the writing on the nature and improvement of this
gadget with accentuation on careful applications [8]. We have checked on the distributed writing
and characterized mechanical arms by their application: appear, modern application, medicinal
application, and so on. There is a distinct pattern in the production of mechanical arms toward
progressively dextrous gadgets, more degrees-of-opportunity, and capacities past the human arm.
da Vinci structured the primary advanced automated arm in 1495 with four degrees-of-
opportunity and a simple onboard controller providing force and programmability. von
Kemplen's chess-playing robot left arm was very refined . Unimate presented the principal
mechanical automated arm in 1961, it has accordingly developed into the Jaguar arm.
In 1963 the Rancho arm was structured; Minsky's Limb arm showed up in 1968,
Scheinman's Stanford arm in 1969, and MIT's Silver arm in 1974. Aird turned into the primary
cyborg human with a mechanical arm in 1993. In 2000 Miguel Nicolalis re-imagined
conceivable man– machine limit in his work on cerebral implantation in owl-monkeys
straightforwardly interfacing with automated arms both locally and at a separation. The
mechanical arm is the end-effector of automated frameworks and as of now is the trademark
highlight of the da Vinci Careful Framework making its passage into the careful application. Be
that as it may, in spite of the potential points of interest of this PC controlled master slave
framework, mechanical arms have unmistakable confinements.
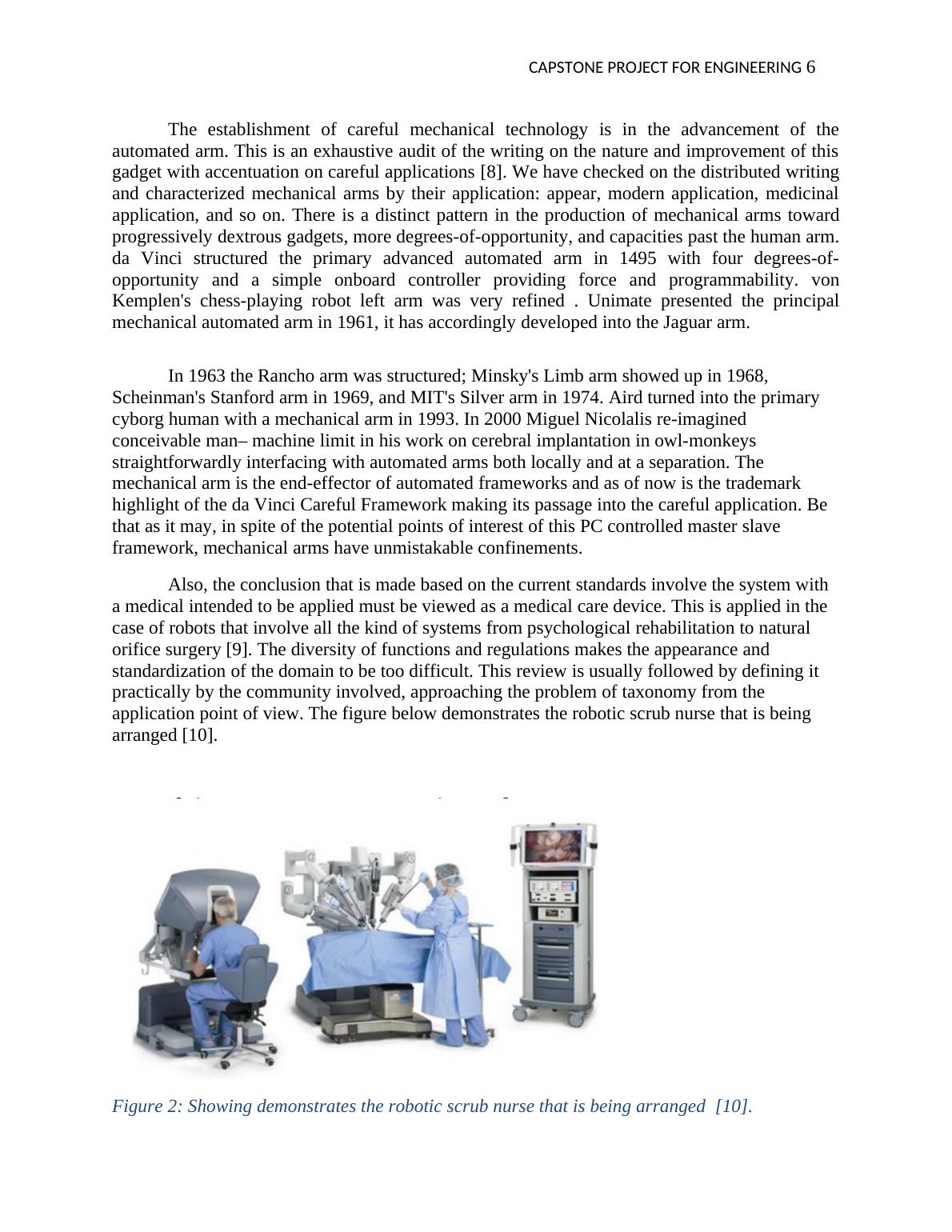
Also, the conclusion that is made based on the current standards involve the system with
a medical intended to be applied must be viewed as a medical care device. This is applied in the
case of robots that involve all the kind of systems from psychological rehabilitation to natural
orifice surgery [9]. The diversity of functions and regulations makes the appearance and
standardization of the domain to be too difficult. This review is usually followed by defining it
practically by the community involved, approaching the problem of taxonomy from the
application point of view. The figure below demonstrates the robotic scrub nurse that is being
arranged [10].
Figure 2: Showing demonstrates the robotic scrub nurse that is being arranged [10].
The establishment of careful mechanical technology is in the advancement of the
automated arm. This is an exhaustive audit of the writing on the nature and improvement of this
gadget with accentuation on careful applications [8]. We have checked on the distributed writing
and characterized mechanical arms by their application: appear, modern application, medicinal
application, and so on. There is a distinct pattern in the production of mechanical arms toward
progressively dextrous gadgets, more degrees-of-opportunity, and capacities past the human arm.
da Vinci structured the primary advanced automated arm in 1495 with four degrees-of-
opportunity and a simple onboard controller providing force and programmability. von
Kemplen's chess-playing robot left arm was very refined . Unimate presented the principal
mechanical automated arm in 1961, it has accordingly developed into the Jaguar arm.
In 1963 the Rancho arm was structured; Minsky's Limb arm showed up in 1968,
Scheinman's Stanford arm in 1969, and MIT's Silver arm in 1974. Aird turned into the primary
cyborg human with a mechanical arm in 1993. In 2000 Miguel Nicolalis re-imagined
conceivable man– machine limit in his work on cerebral implantation in owl-monkeys
straightforwardly interfacing with automated arms both locally and at a separation. The
mechanical arm is the end-effector of automated frameworks and as of now is the trademark
highlight of the da Vinci Careful Framework making its passage into the careful application. Be
that as it may, in spite of the potential points of interest of this PC controlled master slave
framework, mechanical arms have unmistakable confinements.
Also, the conclusion that is made based on the current standards involve the system with
a medical intended to be applied must be viewed as a medical care device. This is applied in the
case of robots that involve all the kind of systems from psychological rehabilitation to natural
orifice surgery [9]. The diversity of functions and regulations makes the appearance and
standardization of the domain to be too difficult. This review is usually followed by defining it
practically by the community involved, approaching the problem of taxonomy from the
application point of view. The figure below demonstrates the robotic scrub nurse that is being
arranged [10].
Figure 2: Showing demonstrates the robotic scrub nurse that is being arranged [10].
CAPSTONE PROJECT FOR ENGINEERING 7
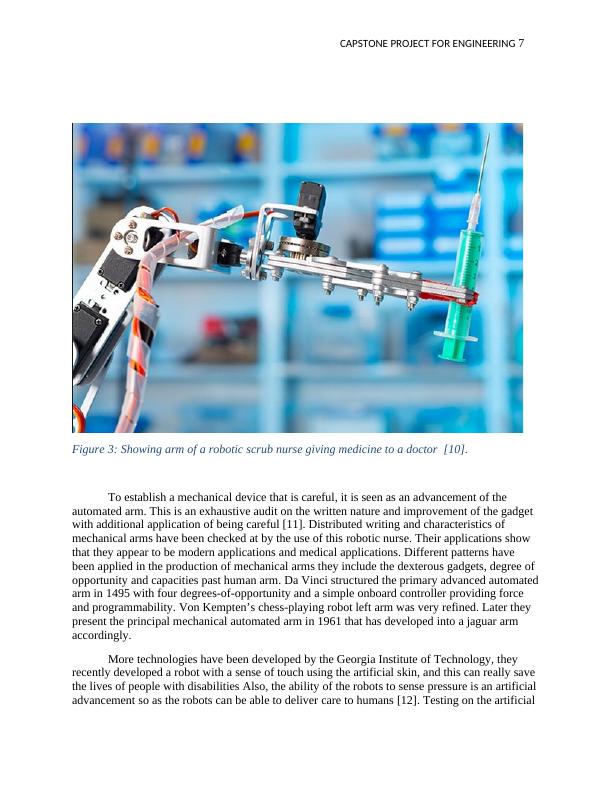
Figure 3: Showing arm of a robotic scrub nurse giving medicine to a doctor [10].
To establish a mechanical device that is careful, it is seen as an advancement of the
automated arm. This is an exhaustive audit on the written nature and improvement of the gadget
with additional application of being careful [11]. Distributed writing and characteristics of
mechanical arms have been checked at by the use of this robotic nurse. Their applications show
that they appear to be modern applications and medical applications. Different patterns have
been applied in the production of mechanical arms they include the dexterous gadgets, degree of
opportunity and capacities past human arm. Da Vinci structured the primary advanced automated
arm in 1495 with four degrees-of-opportunity and a simple onboard controller providing force
and programmability. Von Kempten’s chess-playing robot left arm was very refined. Later they
present the principal mechanical automated arm in 1961 that has developed into a jaguar arm
accordingly.
More technologies have been developed by the Georgia Institute of Technology, they
recently developed a robot with a sense of touch using the artificial skin, and this can really save
the lives of people with disabilities Also, the ability of the robots to sense pressure is an artificial
advancement so as the robots can be able to deliver care to humans [12]. Testing on the artificial
Figure 3: Showing arm of a robotic scrub nurse giving medicine to a doctor [10].
To establish a mechanical device that is careful, it is seen as an advancement of the
automated arm. This is an exhaustive audit on the written nature and improvement of the gadget
with additional application of being careful [11]. Distributed writing and characteristics of
mechanical arms have been checked at by the use of this robotic nurse. Their applications show
that they appear to be modern applications and medical applications. Different patterns have
been applied in the production of mechanical arms they include the dexterous gadgets, degree of
opportunity and capacities past human arm. Da Vinci structured the primary advanced automated
arm in 1495 with four degrees-of-opportunity and a simple onboard controller providing force
and programmability. Von Kempten’s chess-playing robot left arm was very refined. Later they
present the principal mechanical automated arm in 1961 that has developed into a jaguar arm
accordingly.
More technologies have been developed by the Georgia Institute of Technology, they
recently developed a robot with a sense of touch using the artificial skin, and this can really save
the lives of people with disabilities Also, the ability of the robots to sense pressure is an artificial
advancement so as the robots can be able to deliver care to humans [12]. Testing on the artificial
CAPSTONE PROJECT FOR ENGINEERING 8
skin is ongoing on the robotic arm by the use of a series of sensors to transform information to
the computers that determines how much pressure the robots should exert when in contact with
humans. Programming of these robots can also be done by the researcher so as to be able to
deliver the right amount of pressure when in contact with the human [13]. A California man
called Henry Evans become paraplegic after being hit by a stroke, becomes instrumental in the
testing of these gadgets. Being part of this research, the robot has interacted with him freely in
his daily task.
The robots have been introduced into the U.S workforce and they have been categories
into two o groups which include the one that replaces the previous work done by the humans and
the telemedicine-based robotics that connects clinicians and patients in ways that previously did
not exist [14]. They exist in more advanced and large medical Centre that has a scale, budget and
the operational mobility to invest in the technology. To better the lives of people, other robotic
advancements have invented which include the Bestic Arm. they assist the patent with meals and
Toyota healthcare assistant that is used into regaining people’s ability to walk. Robots have
grown to be common gadgets in the U.S hospitals, for example, they are used as a replacement of
runners whose responsibilities were previously to deliveries [15].
In the field of acute care setting, robots can now be applied to enhance telemedicine for
those restricted to their homes. The phone is also applied as a two-way call system used by the
physician to communicate with the patients is the use of personal computers, camera and the
monitor to control the robot. Also, the interaction of the patient with the doctor has also been
improved by introducing the new Remote Presence Virtual and Independent Telemedicine
Assistant. In 2013, another development was formulated by the Global Research GE that will
help the veteran’s affairs department to develop an intelligent system that will be used to select
and clean track surgical instruments [16]. This system was to put to test in VA hospital in 2015.
The dilemma existed in this field despite the advancement made, on whether these
expensive innovations will bear efficient and consistent results. It will be considered in the time
to come but for now, nurses will be prepared for more innovations change in the way care is
delivers by the new technology. Robots allow nurses to spend more time to communicate with
their client so as to enhance efficiency and effectiveness in the place of work [17].
In 1963, the structure of Rancho arm and in1968, the Minsky's was showed up, 1969
Scheinman's Stanford arm was established while in 1974 MIT's silver arm was developed. Aird
was changed into the primary cyborg human with a mechanical arm in 1993. Miguel Nicolaus
developed conceivable man-machine in 2000 which limit his work on cerebral implantation in
owl- monkeys with the straight forward automated hands interface with both local and a separate
device. The mechanical arms are the end effector of frameworks which are automated and since
then it has grown to become a trademark of the framework developers as it passes carefully to
the applicants [18]. The unmistakable confinements of these mechanical arms are controlled,
despite the potential framework of the master-slave. The work in progress is done by the
autonomy which contains many solutions despite the downside of the current frameworks which
are automated. This is very important since the robotic nurse is highly used to perform many
functions like the following.
This research has some of the strengths as well as weaknesses. For the strength, this
research vividly gives more information about the Robotic scrub Nurses who are employed to
skin is ongoing on the robotic arm by the use of a series of sensors to transform information to
the computers that determines how much pressure the robots should exert when in contact with
humans. Programming of these robots can also be done by the researcher so as to be able to
deliver the right amount of pressure when in contact with the human [13]. A California man
called Henry Evans become paraplegic after being hit by a stroke, becomes instrumental in the
testing of these gadgets. Being part of this research, the robot has interacted with him freely in
his daily task.
The robots have been introduced into the U.S workforce and they have been categories
into two o groups which include the one that replaces the previous work done by the humans and
the telemedicine-based robotics that connects clinicians and patients in ways that previously did
not exist [14]. They exist in more advanced and large medical Centre that has a scale, budget and
the operational mobility to invest in the technology. To better the lives of people, other robotic
advancements have invented which include the Bestic Arm. they assist the patent with meals and
Toyota healthcare assistant that is used into regaining people’s ability to walk. Robots have
grown to be common gadgets in the U.S hospitals, for example, they are used as a replacement of
runners whose responsibilities were previously to deliveries [15].
In the field of acute care setting, robots can now be applied to enhance telemedicine for
those restricted to their homes. The phone is also applied as a two-way call system used by the
physician to communicate with the patients is the use of personal computers, camera and the
monitor to control the robot. Also, the interaction of the patient with the doctor has also been
improved by introducing the new Remote Presence Virtual and Independent Telemedicine
Assistant. In 2013, another development was formulated by the Global Research GE that will
help the veteran’s affairs department to develop an intelligent system that will be used to select
and clean track surgical instruments [16]. This system was to put to test in VA hospital in 2015.
The dilemma existed in this field despite the advancement made, on whether these
expensive innovations will bear efficient and consistent results. It will be considered in the time
to come but for now, nurses will be prepared for more innovations change in the way care is
delivers by the new technology. Robots allow nurses to spend more time to communicate with
their client so as to enhance efficiency and effectiveness in the place of work [17].
In 1963, the structure of Rancho arm and in1968, the Minsky's was showed up, 1969
Scheinman's Stanford arm was established while in 1974 MIT's silver arm was developed. Aird
was changed into the primary cyborg human with a mechanical arm in 1993. Miguel Nicolaus
developed conceivable man-machine in 2000 which limit his work on cerebral implantation in
owl- monkeys with the straight forward automated hands interface with both local and a separate
device. The mechanical arms are the end effector of frameworks which are automated and since
then it has grown to become a trademark of the framework developers as it passes carefully to
the applicants [18]. The unmistakable confinements of these mechanical arms are controlled,
despite the potential framework of the master-slave. The work in progress is done by the
autonomy which contains many solutions despite the downside of the current frameworks which
are automated. This is very important since the robotic nurse is highly used to perform many
functions like the following.
This research has some of the strengths as well as weaknesses. For the strength, this
research vividly gives more information about the Robotic scrub Nurses who are employed to
End of preview
Want to access all the pages? Upload your documents or become a member.