MAR8067 Marine Machinery Systems - Desklib
VerifiedAdded on 2023/04/23
|12
|1473
|163
AI Summary
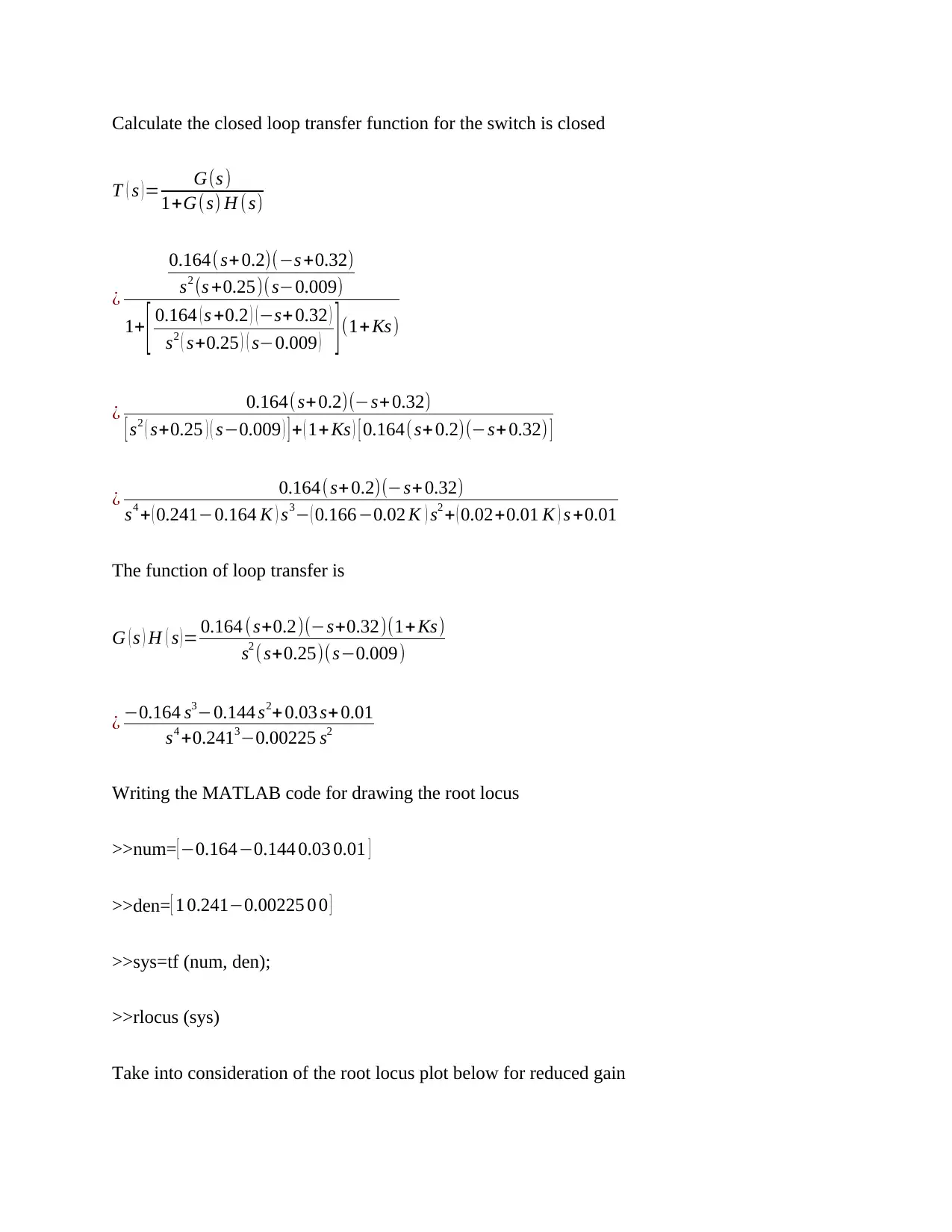
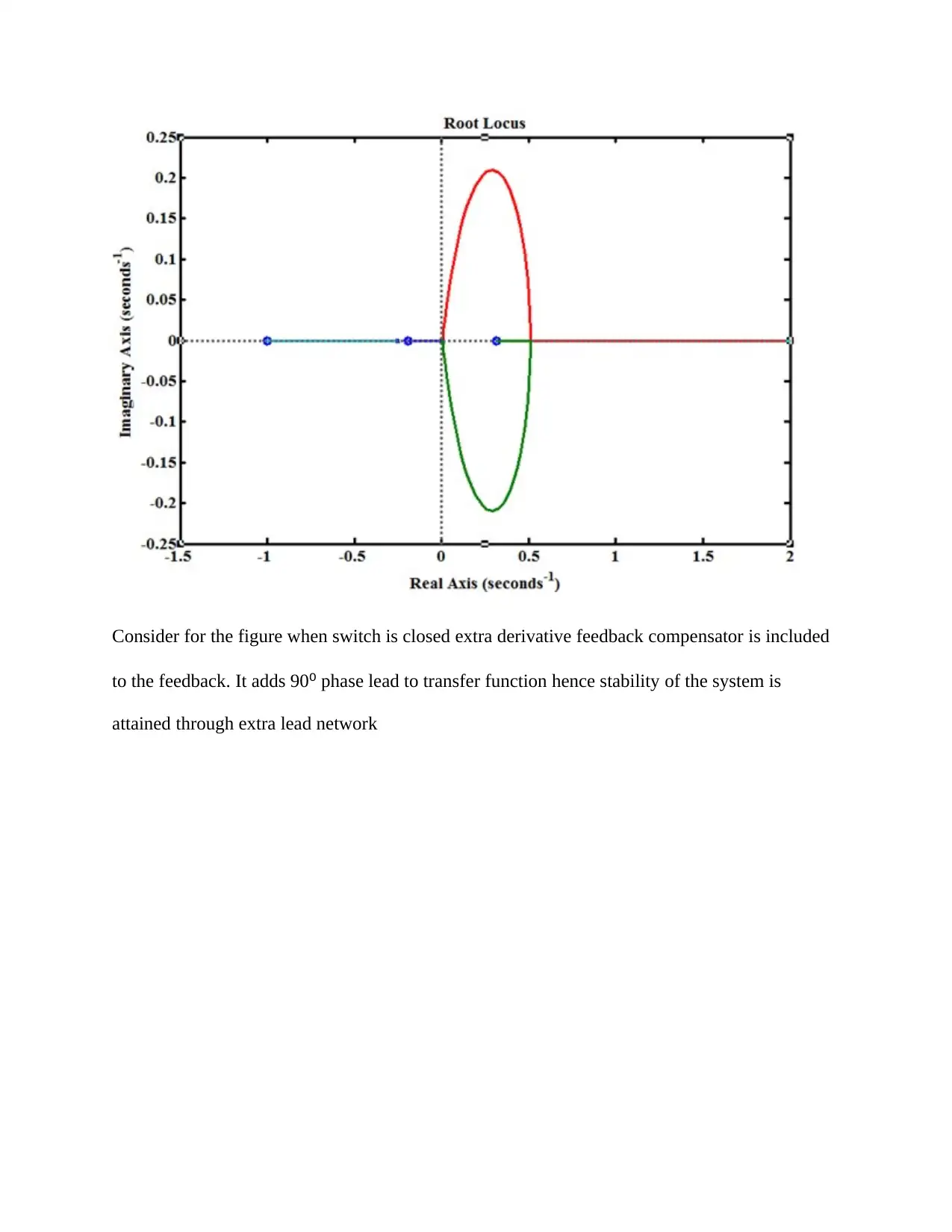
Get solved assignments, essays, dissertation and study material for MAR8067 Marine Machinery Systems at Desklib. This document covers closed-loop block diagram, transfer function, Bode diagram, stability analysis and more.
Contribute Materials
Your contribution can guide someone’s learning journey. Share your
documents today.

1 out of 12
Related Documents





Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
© 2024 | Zucol Services PVT LTD | All rights reserved.