Computer Science Project: K Robots Patrol and Frequency Optimization
VerifiedAdded on 2021/12/22
|19
|3757
|41
Project
AI Summary
This project focuses on the development of a non-deterministic patrol framework using K robots to visit points with optimal frequency, maximizing the chances of detecting an adversary. The robots' movement is analyzed in relation to their sensing and movement capabilities within different environmental models. The project utilizes a polynomial time algorithm to find the optimal patrol strategy, based on a Markovian approach, considering the probability of adversary detection. The project includes hardware and software requirements, use case diagrams, interaction diagrams, and interface design, along with results and risk assessments. The objective is to address the challenges of robot mobility and develop a plan for achieving the project's goals, focusing on time management, information gathering, and solution design. The project aims to maximize the frequency of the robots' patrol, considering different robotic models and movement strategies.
Computer Science
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser

Summary of the Proposal
The goal of this work is to provide a team of k robots to visit each points “Pi”, with the best
possible frequency. Each k robots must be capable of finding the distinct maximum speed of
its monitor on the n points such as, P1, P2, …Pn can be used for the path’s length. In this
problem, movement of the robots can help in finding the visiting target area, in a way that can
maximized the change of detecting the adversary, which tries to penetrate through the petrol
path. The petrol of the k team robots can face a strong adversary of using the deterministic
patrol algorithm. In this case, it is easy to understand the controlling of robots for the
adversary to penetrate undetected (in facts we can use it in some of the cases of adversary
which can guarantee penetration). Therefore, in this paper we have presented a non-
deterministic patrol framework, to find each points of Pi with the possible frequency of the
robot. The advantage of the robots’ control can assume to have strong adversary of
knowledge and try to penetrate through the patrol's weakest spot. Hence, we are using the
optimal algorithm to find maximizing the chances of moving detection of the control points’
frequency. After we use the polynomial algorithm for using an the optimal patrol over the
markovian strategy of the robots assumption that are used for the probability of detecting the
adversary in the patrolling moving points frequency spot is maximized. In this project, a
framework is built to describe the k robots to visit each points of the optimal patrol of several
robotic models strategy that is required for their movement abilities (directed or undirected)
and sensing abilities () perfect or impact), and this project uses different model environments
of the patrol strategy, for robot frequency.
The goal of this work is to provide a team of k robots to visit each points “Pi”, with the best
possible frequency. Each k robots must be capable of finding the distinct maximum speed of
its monitor on the n points such as, P1, P2, …Pn can be used for the path’s length. In this
problem, movement of the robots can help in finding the visiting target area, in a way that can
maximized the change of detecting the adversary, which tries to penetrate through the petrol
path. The petrol of the k team robots can face a strong adversary of using the deterministic
patrol algorithm. In this case, it is easy to understand the controlling of robots for the
adversary to penetrate undetected (in facts we can use it in some of the cases of adversary
which can guarantee penetration). Therefore, in this paper we have presented a non-
deterministic patrol framework, to find each points of Pi with the possible frequency of the
robot. The advantage of the robots’ control can assume to have strong adversary of
knowledge and try to penetrate through the patrol's weakest spot. Hence, we are using the
optimal algorithm to find maximizing the chances of moving detection of the control points’
frequency. After we use the polynomial algorithm for using an the optimal patrol over the
markovian strategy of the robots assumption that are used for the probability of detecting the
adversary in the patrolling moving points frequency spot is maximized. In this project, a
framework is built to describe the k robots to visit each points of the optimal patrol of several
robotic models strategy that is required for their movement abilities (directed or undirected)
and sensing abilities () perfect or impact), and this project uses different model environments
of the patrol strategy, for robot frequency.
Contents
1. Introduction...................................................................................................................................4
1.1 Aim of the project..................................................................................................................5
1.2 Problem Statement.................................................................................................................5
1.3 Project Objective...................................................................................................................5
2. Project Background.......................................................................................................................5
3. Project plan....................................................................................................................................6
4. Implementation stage.....................................................................................................................7
4.1 Hardware requirement...........................................................................................................7
4.2 Software requirements...........................................................................................................7
5. Project design................................................................................................................................7
5.1 Use case diagram...................................................................................................................7
5.2 Interaction diagram................................................................................................................8
5.3 Interface design diagram........................................................................................................9
5.4 Evaluation designing diagram................................................................................................9
6. Results.........................................................................................................................................10
6.1 Output screenshots.............................................................................................................10
7. Risk Assessment..........................................................................................................................14
7.1 Major Challenges.................................................................................................................14
7.2 Required new skills..............................................................................................................14
8. Conclusion...................................................................................................................................15
References...........................................................................................................................................16
1. Introduction...................................................................................................................................4
1.1 Aim of the project..................................................................................................................5
1.2 Problem Statement.................................................................................................................5
1.3 Project Objective...................................................................................................................5
2. Project Background.......................................................................................................................5
3. Project plan....................................................................................................................................6
4. Implementation stage.....................................................................................................................7
4.1 Hardware requirement...........................................................................................................7
4.2 Software requirements...........................................................................................................7
5. Project design................................................................................................................................7
5.1 Use case diagram...................................................................................................................7
5.2 Interaction diagram................................................................................................................8
5.3 Interface design diagram........................................................................................................9
5.4 Evaluation designing diagram................................................................................................9
6. Results.........................................................................................................................................10
6.1 Output screenshots.............................................................................................................10
7. Risk Assessment..........................................................................................................................14
7.1 Major Challenges.................................................................................................................14
7.2 Required new skills..............................................................................................................14
8. Conclusion...................................................................................................................................15
References...........................................................................................................................................16
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
1. Introduction
Today, Robotics are being introduced into the market, which is associated to a
significant success for the robotics field. Its successful development ensures implementation
in various fields, to do multiple tasks which the humans can’t do with ease.For instance, the
robots are utilized for the works which are dangerous,dirty, risky and dull.The robotics are
effective to be utilized for the repetitive tasks, impossible tasks and for the assisting tasks.
Usually, in an industry people hate to do repetitive taskslike, packaging products into boxes,
lifting heavy objects repeatedly, or manufacturing. And in such case, the robots come in for
the rescue. In general, the robots can be easily relied on for such tasks. They have no
emotions and won’t feel worthless when some menial tasks are assigned to it. Moreover,
developing robots is not simple as it involves various stages such as, conception, designing,
operation and manufacturingthe robots. However, the robotics have various application areas
such as, in outer space applications, like NASA’s Mars rovers; for military applications,
likePredator drone that helps to take photographs of surveillance, accurately launching the
missiles on the target in the absence of pilots and so on; intelligent home applications, like
monitoring the home security, its environmental conditions and energy consumption with the
help of intelligent robotic home systems; then for helping the industryand health services.
This report outlines the research of initial work to be performed on the k robots, to
visit each points Pi with the best possible frequency. Research into the outlined existing
technologies with the appropriate references of robotic frequency. Validate the testing
technologies, to perform the overall designing, at the time of writing the functional
description of each modules. Hence, we can move on the robots and we can find the
maximization of the best possible frequency controlling process. The problem of K robots
patrol has gained usage mainly due to the immediate relevance to various security system
application. In the K robot patrol problem, the robots repeat on moving the target area to
monitor it. In this research paper, we have focused on the frequency based approaches, to
findeach point’s visit frequency criteria that uses the patrol algorithm of the K robots process
finding system. We are using some algorithm to find the maximizing frequency.
1.1 Aim of the project
The aim of this project is to identify the substantial problem, then produces a plan for
addressing the issue, ensure time management of the plan, gather relevant information that
are required to complete theproject, and designa solution for the substantial problem.
Today, Robotics are being introduced into the market, which is associated to a
significant success for the robotics field. Its successful development ensures implementation
in various fields, to do multiple tasks which the humans can’t do with ease.For instance, the
robots are utilized for the works which are dangerous,dirty, risky and dull.The robotics are
effective to be utilized for the repetitive tasks, impossible tasks and for the assisting tasks.
Usually, in an industry people hate to do repetitive taskslike, packaging products into boxes,
lifting heavy objects repeatedly, or manufacturing. And in such case, the robots come in for
the rescue. In general, the robots can be easily relied on for such tasks. They have no
emotions and won’t feel worthless when some menial tasks are assigned to it. Moreover,
developing robots is not simple as it involves various stages such as, conception, designing,
operation and manufacturingthe robots. However, the robotics have various application areas
such as, in outer space applications, like NASA’s Mars rovers; for military applications,
likePredator drone that helps to take photographs of surveillance, accurately launching the
missiles on the target in the absence of pilots and so on; intelligent home applications, like
monitoring the home security, its environmental conditions and energy consumption with the
help of intelligent robotic home systems; then for helping the industryand health services.
This report outlines the research of initial work to be performed on the k robots, to
visit each points Pi with the best possible frequency. Research into the outlined existing
technologies with the appropriate references of robotic frequency. Validate the testing
technologies, to perform the overall designing, at the time of writing the functional
description of each modules. Hence, we can move on the robots and we can find the
maximization of the best possible frequency controlling process. The problem of K robots
patrol has gained usage mainly due to the immediate relevance to various security system
application. In the K robot patrol problem, the robots repeat on moving the target area to
monitor it. In this research paper, we have focused on the frequency based approaches, to
findeach point’s visit frequency criteria that uses the patrol algorithm of the K robots process
finding system. We are using some algorithm to find the maximizing frequency.
1.1 Aim of the project
The aim of this project is to identify the substantial problem, then produces a plan for
addressing the issue, ensure time management of the plan, gather relevant information that
are required to complete theproject, and designa solution for the substantial problem.
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser

1.2 Problem Statement
The problem in this project revolves around the mobility of the robots. For instance,
without any supervision how the robots can move to accomplish the assigned tasks. Thus, the
very first challenge includes locomotion.
1.3 Project Objective
The objective of this project is to provide the project specification, for ensuring the
clarity of the project. A well-defined plan, to be carried out will be presented.
2. Project Background
It is now very clear that the robots have significant roles to play.This study deals with
the problem of robot’s movement, with distinct visibility ranges patrolling a curve. Here,
there is an assumption of a set of k mobile robots (patrolmen) a1, a2, · · · ,ak which walks
through the unit-length curve,possibly in a couple of directions, without exceeding their
maximal speeds. Each robot a contains a range of visibility ri ,which helps to determine the
distance from its actual position. From its actual position it can actually view the direction
along the curve.
Each k robots must be capable of finding the distinct maximum speed of its monitor on the n
points such as, P1, P2, …Pn can be used for the path’s length. In this problem, movement of
the robots can help in finding the visiting target area, in a way that can maximized the change
of detectingthe adversary, which tries to penetrate through the petrol path. The petrol of the k
team robots can facea strong adversary of using the deterministic patrol algorithm. In this
case, it is easy to understand the controlling of robots for the adversary to penetrate
undetected (in facts we can use it in some of the cases of adversary which can guarantee
penetration). Therefore, in this paper we have presented a non-deterministic patrol
framework, to find each points of Pi with the possible frequency of the robot. The advantage
of the robots’ control can assume to have strong adversary of knowledge and try to penetrate
through the patrol's weakest spot. Hence, we are using the optimal algorithm to find
maximizing the chances of moving detection of the control points’ frequency. After we use
the polynomial algorithm for using an the optimal patrol over the markovian strategy of the
robots assumption that are used for the probability of detecting the adversary in the patrolling
moving points frequency spot is maximized. In this project, a framework is built to describe
The problem in this project revolves around the mobility of the robots. For instance,
without any supervision how the robots can move to accomplish the assigned tasks. Thus, the
very first challenge includes locomotion.
1.3 Project Objective
The objective of this project is to provide the project specification, for ensuring the
clarity of the project. A well-defined plan, to be carried out will be presented.
2. Project Background
It is now very clear that the robots have significant roles to play.This study deals with
the problem of robot’s movement, with distinct visibility ranges patrolling a curve. Here,
there is an assumption of a set of k mobile robots (patrolmen) a1, a2, · · · ,ak which walks
through the unit-length curve,possibly in a couple of directions, without exceeding their
maximal speeds. Each robot a contains a range of visibility ri ,which helps to determine the
distance from its actual position. From its actual position it can actually view the direction
along the curve.
Each k robots must be capable of finding the distinct maximum speed of its monitor on the n
points such as, P1, P2, …Pn can be used for the path’s length. In this problem, movement of
the robots can help in finding the visiting target area, in a way that can maximized the change
of detectingthe adversary, which tries to penetrate through the petrol path. The petrol of the k
team robots can facea strong adversary of using the deterministic patrol algorithm. In this
case, it is easy to understand the controlling of robots for the adversary to penetrate
undetected (in facts we can use it in some of the cases of adversary which can guarantee
penetration). Therefore, in this paper we have presented a non-deterministic patrol
framework, to find each points of Pi with the possible frequency of the robot. The advantage
of the robots’ control can assume to have strong adversary of knowledge and try to penetrate
through the patrol's weakest spot. Hence, we are using the optimal algorithm to find
maximizing the chances of moving detection of the control points’ frequency. After we use
the polynomial algorithm for using an the optimal patrol over the markovian strategy of the
robots assumption that are used for the probability of detecting the adversary in the patrolling
moving points frequency spot is maximized. In this project, a framework is built to describe

the k robots to visit each points of the optimal patrol of several robotic models strategy that is
required for their movement abilities (directed or undirected) and sensing abilities () perfect
or impact), and this project uses different model environments of the patrol strategy, for robot
frequency.
3. Project plan
The planning project we have develops the patrol points of k robots that are following
those points which the robots visit and find the maximizing chance of frequency detection.
The framework planning to consider the K robots can visit each point of interface, to find the
computational traceable optimal result frequency ("MclennanS New Encoder Is Micro Sized
And Maximum In Resolution").
We first consider the problems of patrolling around visiting each point of frequency. We have
to introduce the non-deterministic framework for the patrol, to move on the robots to find the
first point of maximum frequency under the first order Markovian for k robot strategy, in
which the robots choose their next move at random, with some probability p. To findthe
probability we can use the patrol algorithm. The markovian chain can be used for this model
that can find the polynomial time and probability of detection at each point along the function
of P frequency. The polynomial time algorithm (polynomial in the input size, depending on
the number of k robots and the characteristic of environment)can be used to find the optimal
patrol for the k robots facing the full frequency of each point.
This paper describes the basic k robots maximizing frequency and environmental model. We
introduce the patrolling robots. We describe a polynomial time algorithm for determining the
probability of penetration detection at each point of the patrol algorithm for the robots. It
assumes the face of maximizing speed for defining the optimal patrol points of frequency.
The basic framework can be used in order to consider various robotic and movement models
for visiting each points on maximizing frequency at different k robots.
4. Implementation stage
4.1 Hardware requirement
The hardware requirement of the system robotics is going to explain the analysis of
the hardware system. It must understand the physic support, where the software will be
required for their movement abilities (directed or undirected) and sensing abilities () perfect
or impact), and this project uses different model environments of the patrol strategy, for robot
frequency.
3. Project plan
The planning project we have develops the patrol points of k robots that are following
those points which the robots visit and find the maximizing chance of frequency detection.
The framework planning to consider the K robots can visit each point of interface, to find the
computational traceable optimal result frequency ("MclennanS New Encoder Is Micro Sized
And Maximum In Resolution").
We first consider the problems of patrolling around visiting each point of frequency. We have
to introduce the non-deterministic framework for the patrol, to move on the robots to find the
first point of maximum frequency under the first order Markovian for k robot strategy, in
which the robots choose their next move at random, with some probability p. To findthe
probability we can use the patrol algorithm. The markovian chain can be used for this model
that can find the polynomial time and probability of detection at each point along the function
of P frequency. The polynomial time algorithm (polynomial in the input size, depending on
the number of k robots and the characteristic of environment)can be used to find the optimal
patrol for the k robots facing the full frequency of each point.
This paper describes the basic k robots maximizing frequency and environmental model. We
introduce the patrolling robots. We describe a polynomial time algorithm for determining the
probability of penetration detection at each point of the patrol algorithm for the robots. It
assumes the face of maximizing speed for defining the optimal patrol points of frequency.
The basic framework can be used in order to consider various robotic and movement models
for visiting each points on maximizing frequency at different k robots.
4. Implementation stage
4.1 Hardware requirement
The hardware requirement of the system robotics is going to explain the analysis of
the hardware system. It must understand the physic support, where the software will be
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
applied and its limitation, in order to find out easily the potential troubles, and to solve them,
or even to look for better structural features to simplify the necessary application.
Most of the robots are designed with some kind of mobility in mind. Motion makes
this machines animated. Most of the k robots belong to one of the two categories: wheeled
robots or legged robots. Though legs provide an effective way to move on rough terrains,
wheels are generally much more efficient on smooth surfaces. Attention will focus on
surveying some common wheel can’s mobility configurations, to find the frequency(Niiyama
and Kuniyoshi 250-255).
4.2 Software requirements
The system’s software requirement is used for one hand. It is about the informatics
tool used to program the application and tasks developed, along with the alternatives which it
could have also worked with. In this case, it has considered several options: Jupyter, Lego
Mind storm, mat lab and lab view. On the other hand, it explains the developed algorithm
themselves and the diverse possibilities conceived. In this sense, the algorithm can be
classified, as already mentioned before. In two groups, it is too sophisticated to put in Eclipse
and those simpler suitable aspects for the software requirement, to find the maximum
frequency of the K robots(Papcun and Jadlovský 533-542). Always, it keeps clear that all the
process must be carried out in python object oriented programming language, as one of the
preview conditions of this project.
5. Project design
5.1 Use case diagram
The use case diagram is usually referred as the behaviour diagram, which is used to
describe the set of action of the system that can perform in collaboration with one or more
external users of the system(actors)(XU et al. 492). Use case diagrams to shows the actors,
use case and their relationships. An actor to interact with the system of the external entity. An
actor's Use case shows the interaction they have with the system in order to achieve their own
desired goals. It is important to note that other systems (such as all the devices) that are also
external to the system could also be classed as an actor as they can also have a goal of these
reports. . Use case diagram we created based on our understanding, and the rules that we
listed on the Actor.
or even to look for better structural features to simplify the necessary application.
Most of the robots are designed with some kind of mobility in mind. Motion makes
this machines animated. Most of the k robots belong to one of the two categories: wheeled
robots or legged robots. Though legs provide an effective way to move on rough terrains,
wheels are generally much more efficient on smooth surfaces. Attention will focus on
surveying some common wheel can’s mobility configurations, to find the frequency(Niiyama
and Kuniyoshi 250-255).
4.2 Software requirements
The system’s software requirement is used for one hand. It is about the informatics
tool used to program the application and tasks developed, along with the alternatives which it
could have also worked with. In this case, it has considered several options: Jupyter, Lego
Mind storm, mat lab and lab view. On the other hand, it explains the developed algorithm
themselves and the diverse possibilities conceived. In this sense, the algorithm can be
classified, as already mentioned before. In two groups, it is too sophisticated to put in Eclipse
and those simpler suitable aspects for the software requirement, to find the maximum
frequency of the K robots(Papcun and Jadlovský 533-542). Always, it keeps clear that all the
process must be carried out in python object oriented programming language, as one of the
preview conditions of this project.
5. Project design
5.1 Use case diagram
The use case diagram is usually referred as the behaviour diagram, which is used to
describe the set of action of the system that can perform in collaboration with one or more
external users of the system(actors)(XU et al. 492). Use case diagrams to shows the actors,
use case and their relationships. An actor to interact with the system of the external entity. An
actor's Use case shows the interaction they have with the system in order to achieve their own
desired goals. It is important to note that other systems (such as all the devices) that are also
external to the system could also be classed as an actor as they can also have a goal of these
reports. . Use case diagram we created based on our understanding, and the rules that we
listed on the Actor.
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
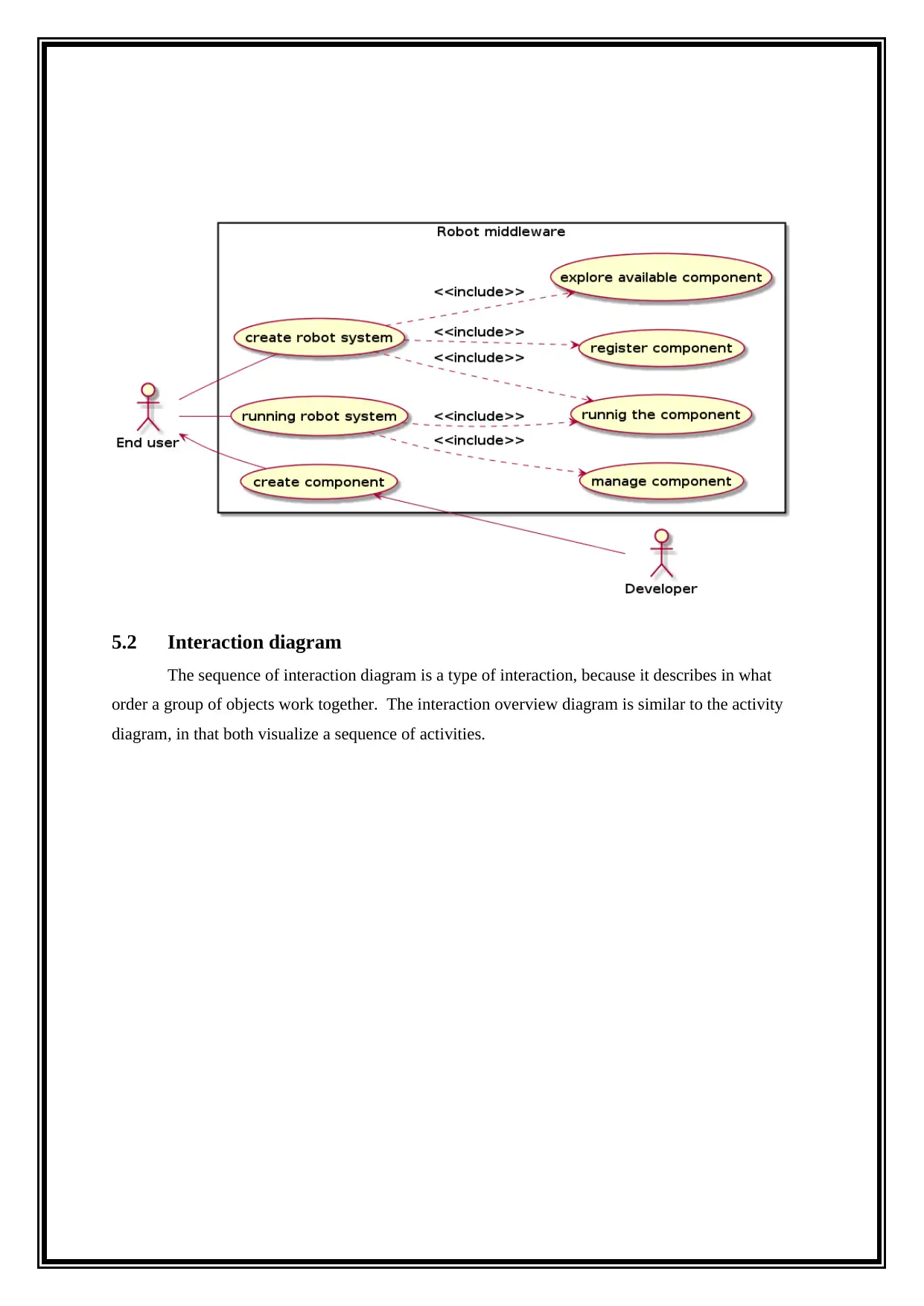
5.2 Interaction diagram
The sequence of interaction diagram is a type of interaction, because it describes in what
order a group of objects work together. The interaction overview diagram is similar to the activity
diagram, in that both visualize a sequence of activities.
The sequence of interaction diagram is a type of interaction, because it describes in what
order a group of objects work together. The interaction overview diagram is similar to the activity
diagram, in that both visualize a sequence of activities.

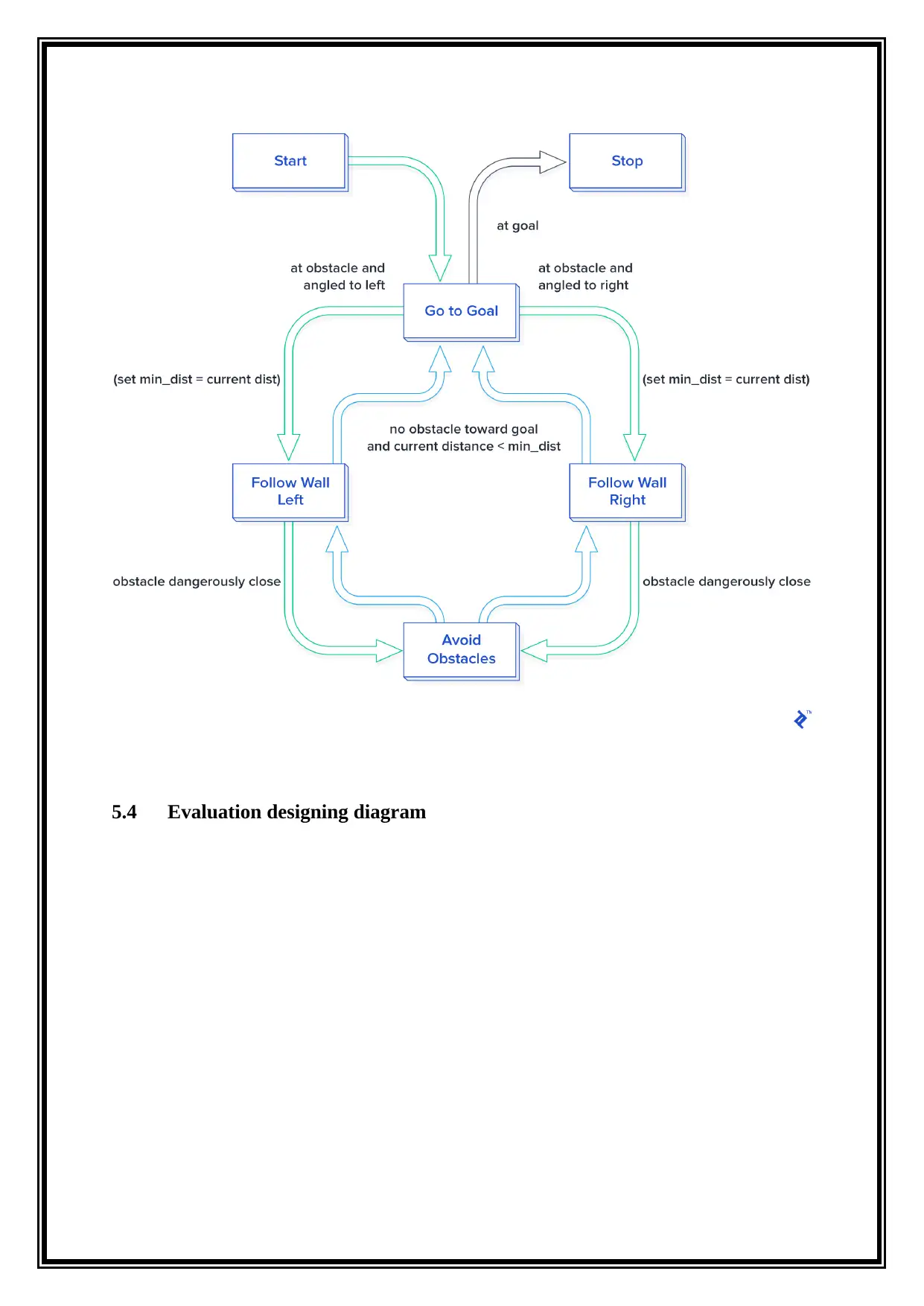
5.3 Interface design diagram
The interface design of the system needs to stabilize very early in the development process in
order to begin creating the stubbed out function tested that call the API function that are part of the
system external interface. The interfaces can be specified in a variety of ways. The specification can
be text only, a graphical model such as a UML class diagram, or a combination of text and graphics. I
prefer using a combination of text and graphics so that data characteristics, syntax, can be specified
using the interface designing. o start the robots can be move on the at obstacle and angled to left on
the visiting the each points of the maximum frequency of the system control of the process. The goal
state of the can be find the maximum frequency on the current state we can used this methods on (set
max_distance=current dist).
The interface design of the system needs to stabilize very early in the development process in
order to begin creating the stubbed out function tested that call the API function that are part of the
system external interface. The interfaces can be specified in a variety of ways. The specification can
be text only, a graphical model such as a UML class diagram, or a combination of text and graphics. I
prefer using a combination of text and graphics so that data characteristics, syntax, can be specified
using the interface designing. o start the robots can be move on the at obstacle and angled to left on
the visiting the each points of the maximum frequency of the system control of the process. The goal
state of the can be find the maximum frequency on the current state we can used this methods on (set
max_distance=current dist).
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
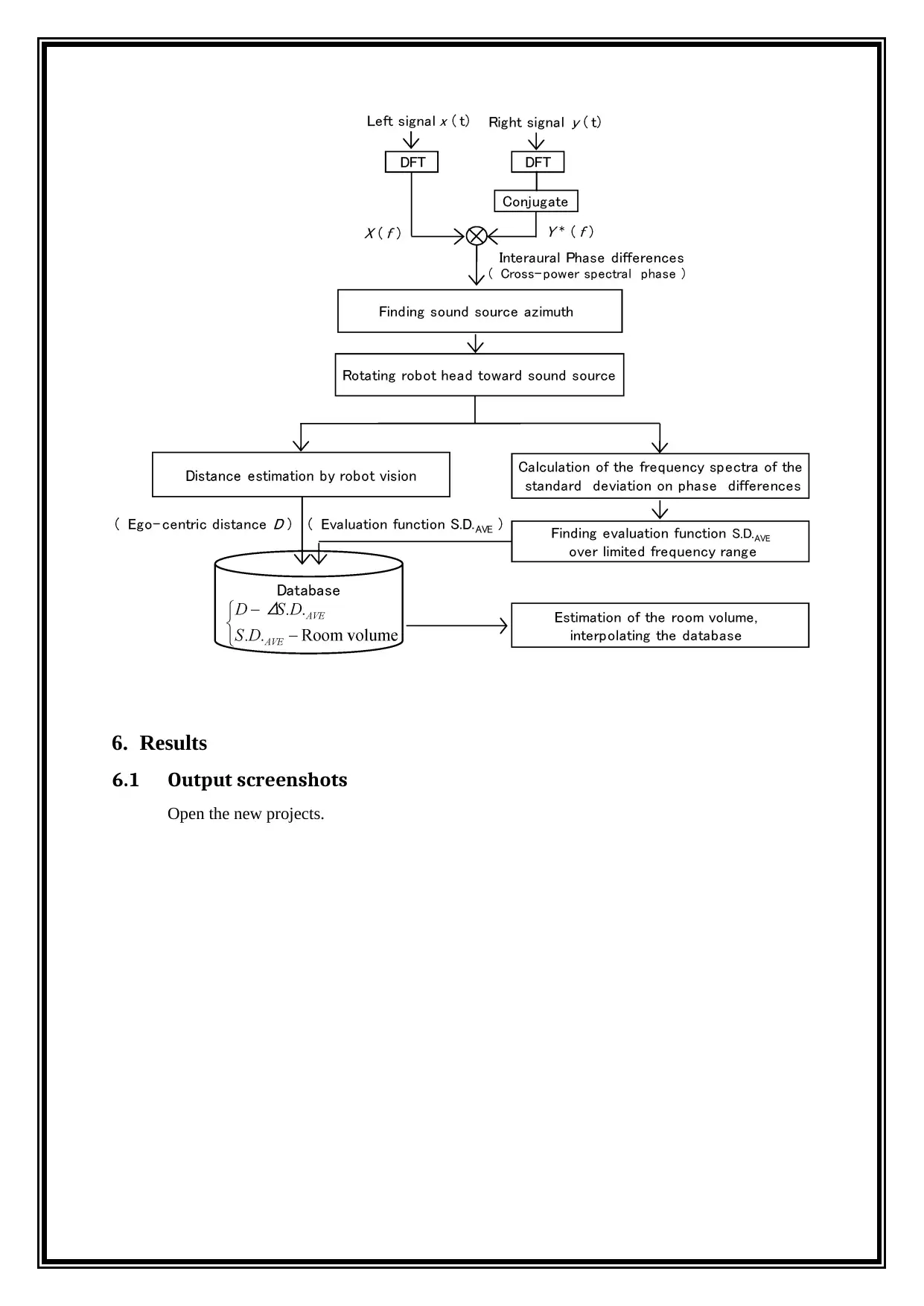
5.4 Evaluation designing diagram
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
6. Results
6.1 Output screenshots
Open the new projects.
6.1 Output screenshots
Open the new projects.
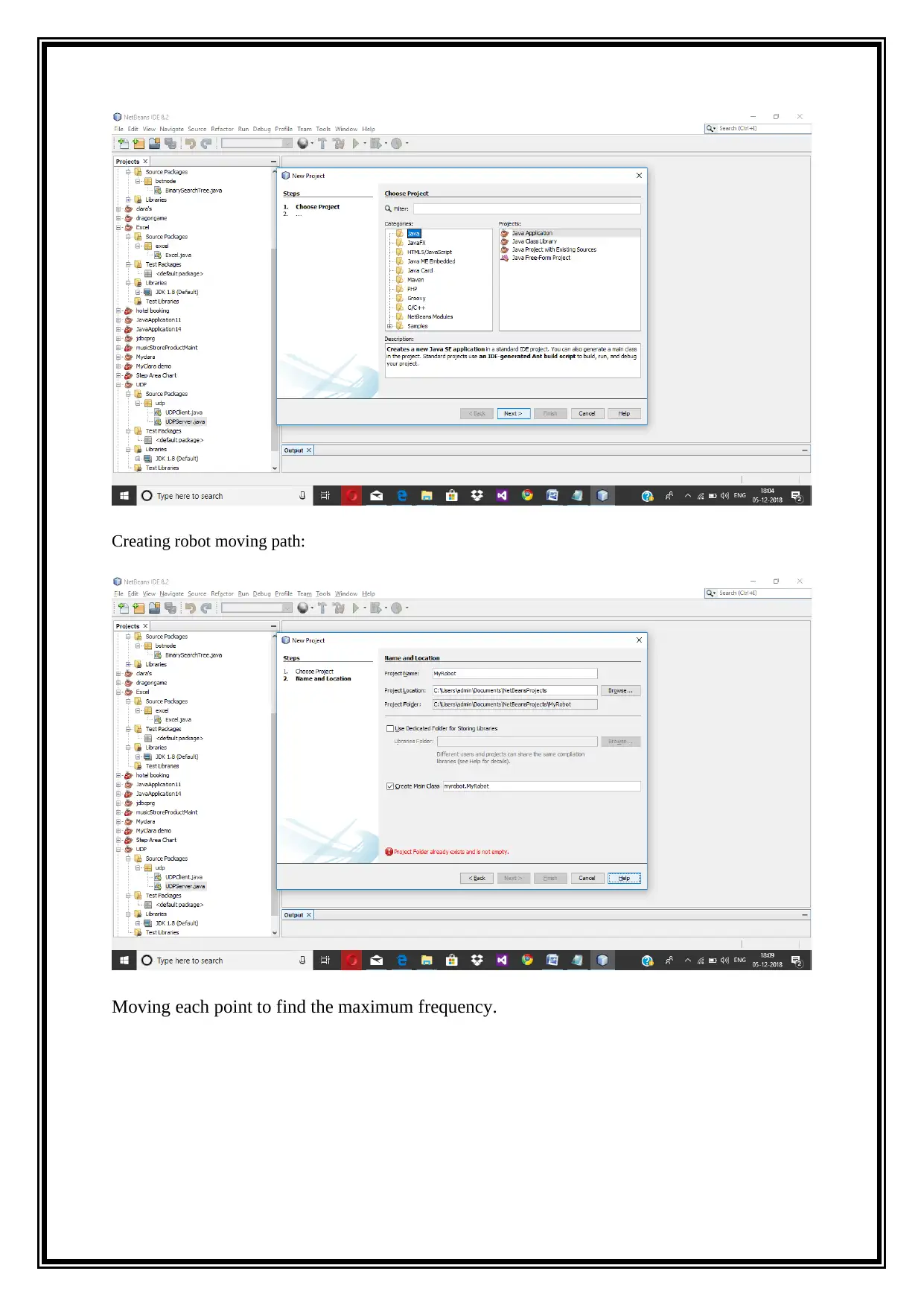
Creating robot moving path:
Moving each point to find the maximum frequency.
Moving each point to find the maximum frequency.
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
1 out of 19
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.