Control Design for F-18 Longitudinal Dynamics
VerifiedAdded on 2023/05/30
|6
|895
|81
AI Summary
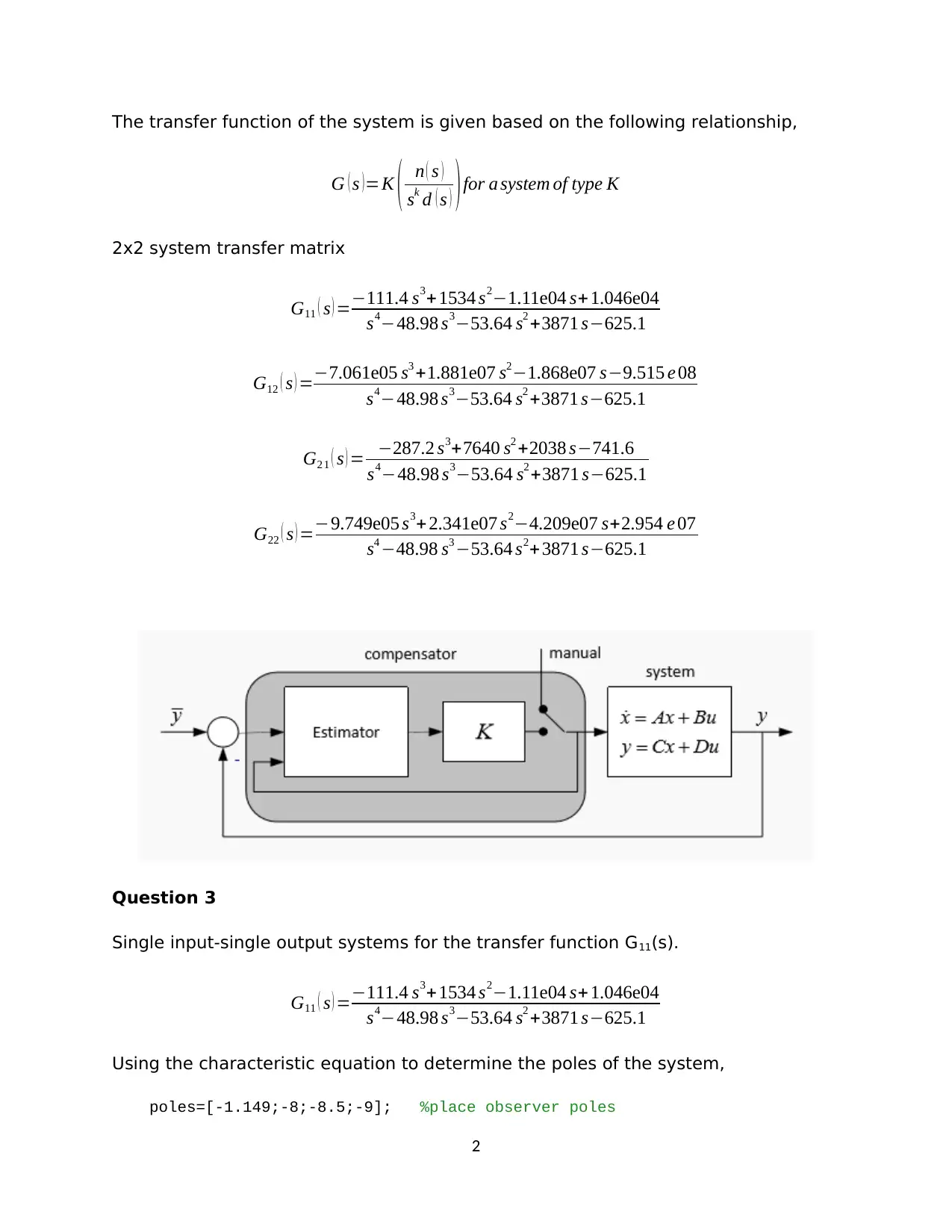
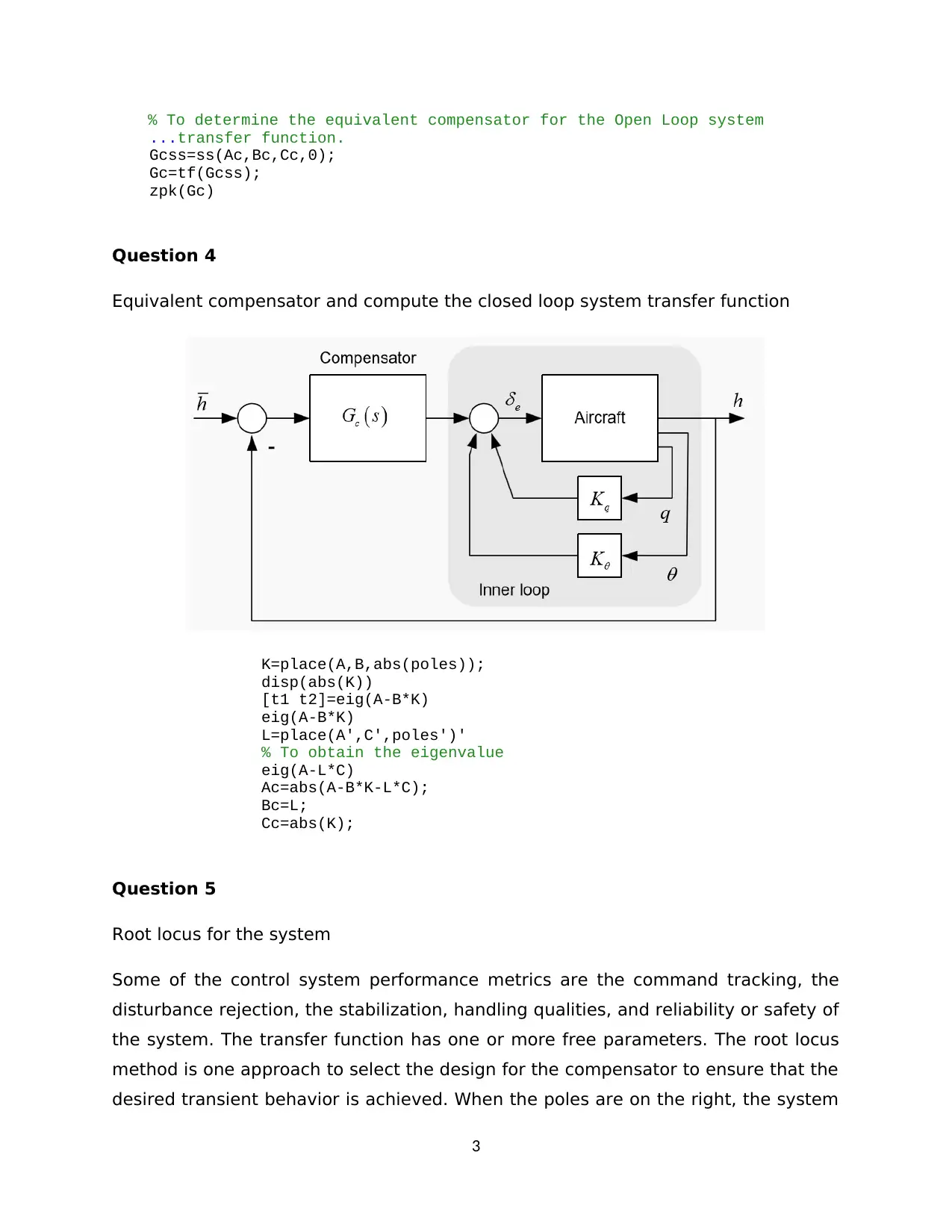
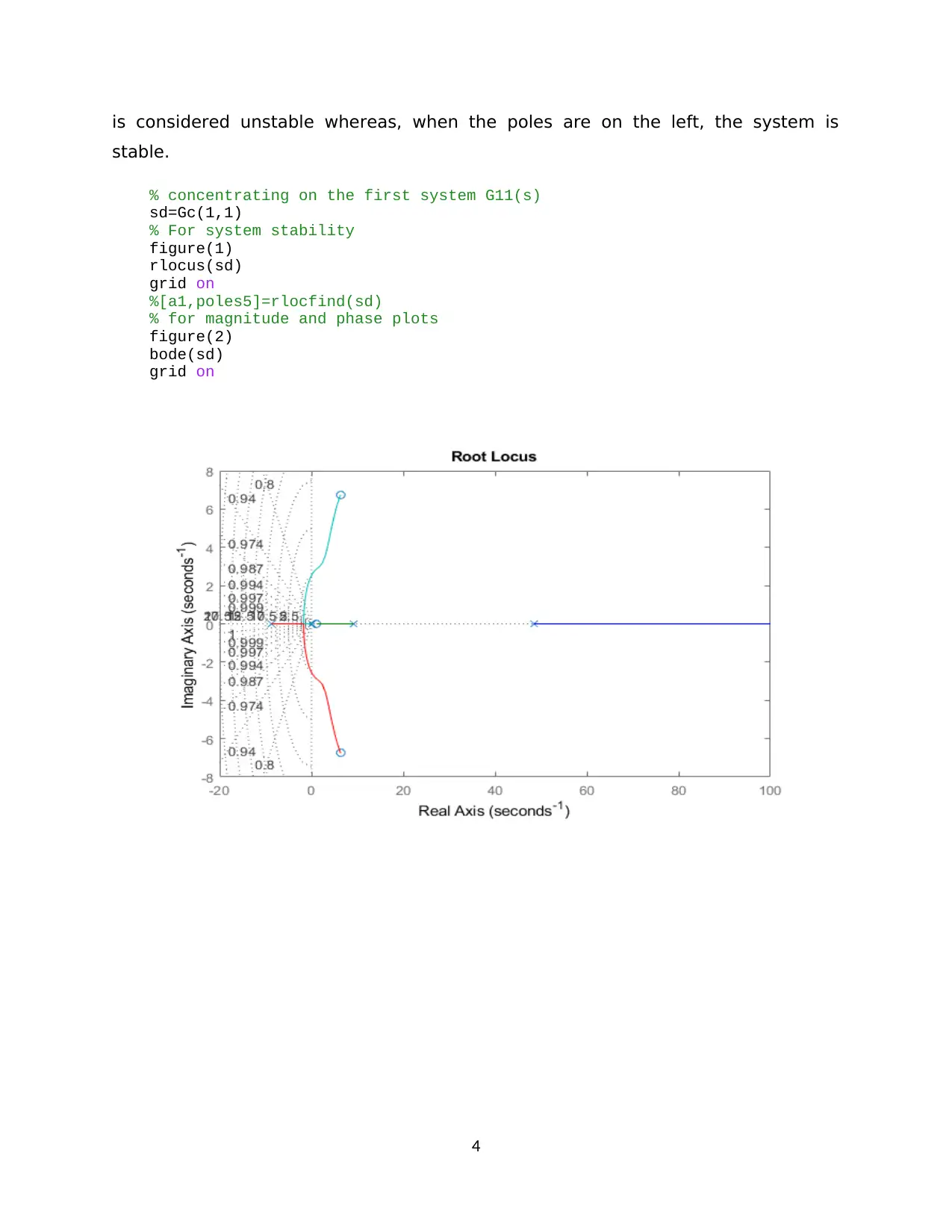
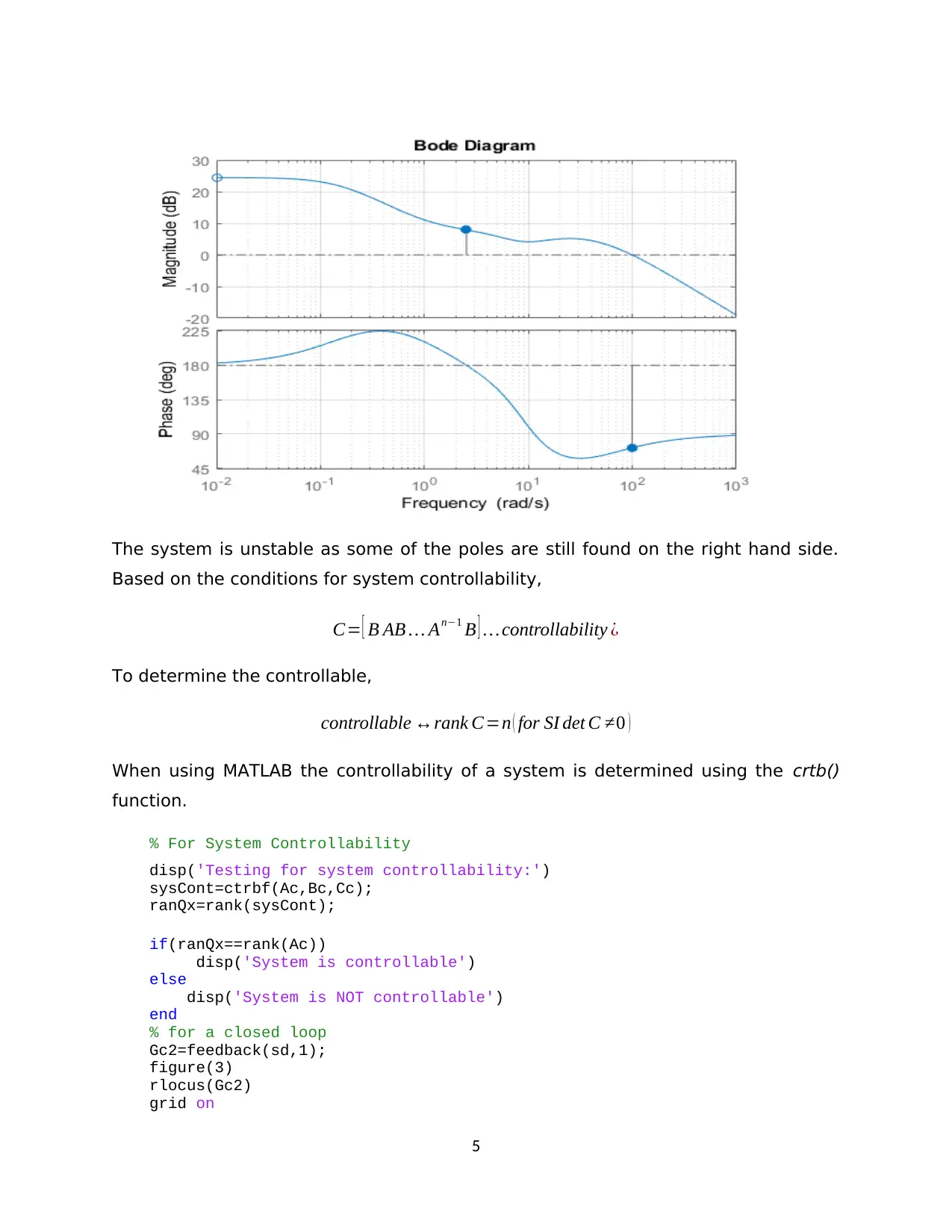
This document discusses the control design for F-18 Longitudinal Dynamics. It covers topics such as open loop system modes, transfer function, equivalent compensator, root locus and system controllability. The document also provides MATLAB code for computations. The subject is Control Design and the course code is F-18 Longitudinal Dynamics. The document is relevant for students studying this course at any college or university.
Contribute Materials
Your contribution can guide someone’s learning journey. Share your
documents today.


1 out of 6


Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
© 2024 | Zucol Services PVT LTD | All rights reserved.