Control Systems: Feedback Analysis and Design - Assignment
VerifiedAdded on 2023/03/30
|19
|1966
|295
Homework Assignment
AI Summary
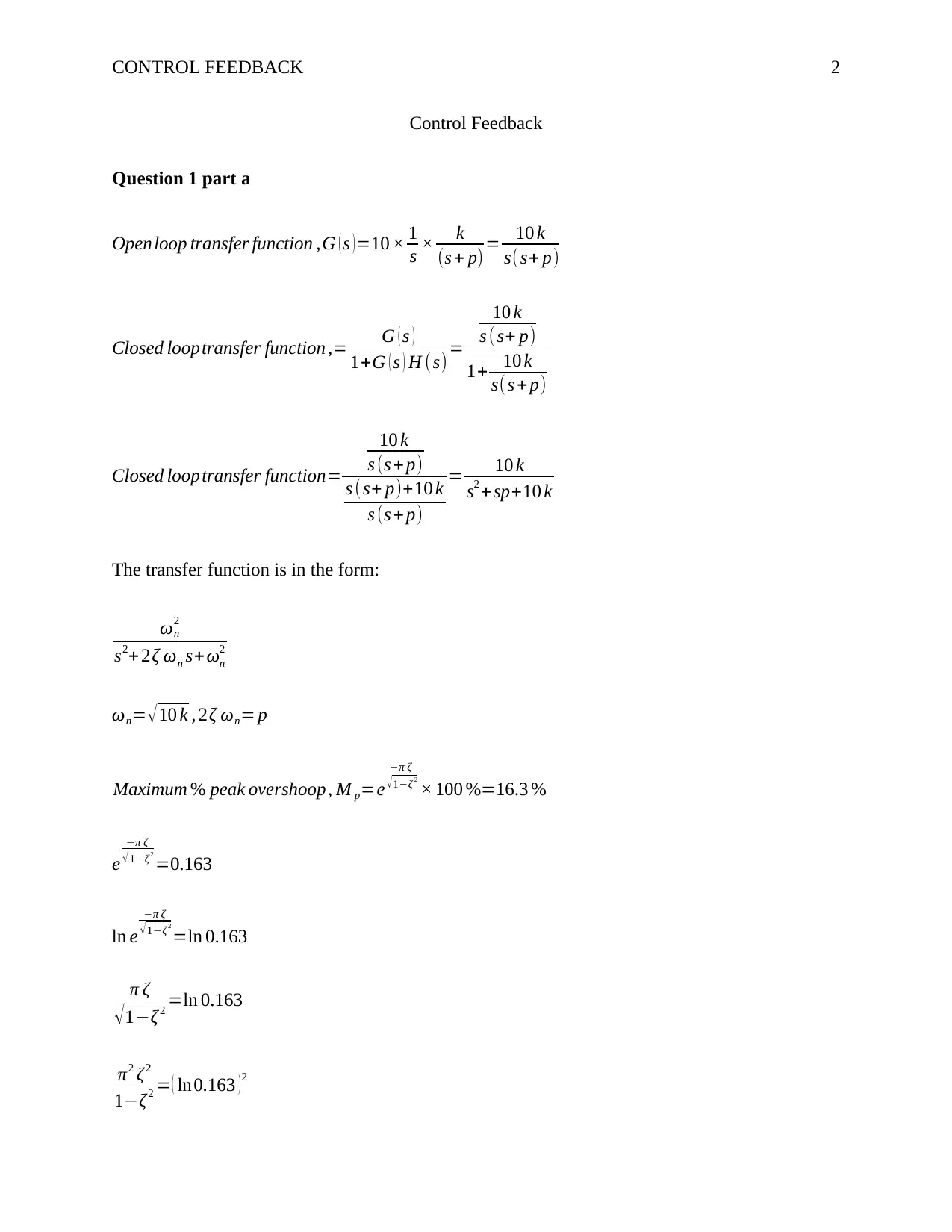
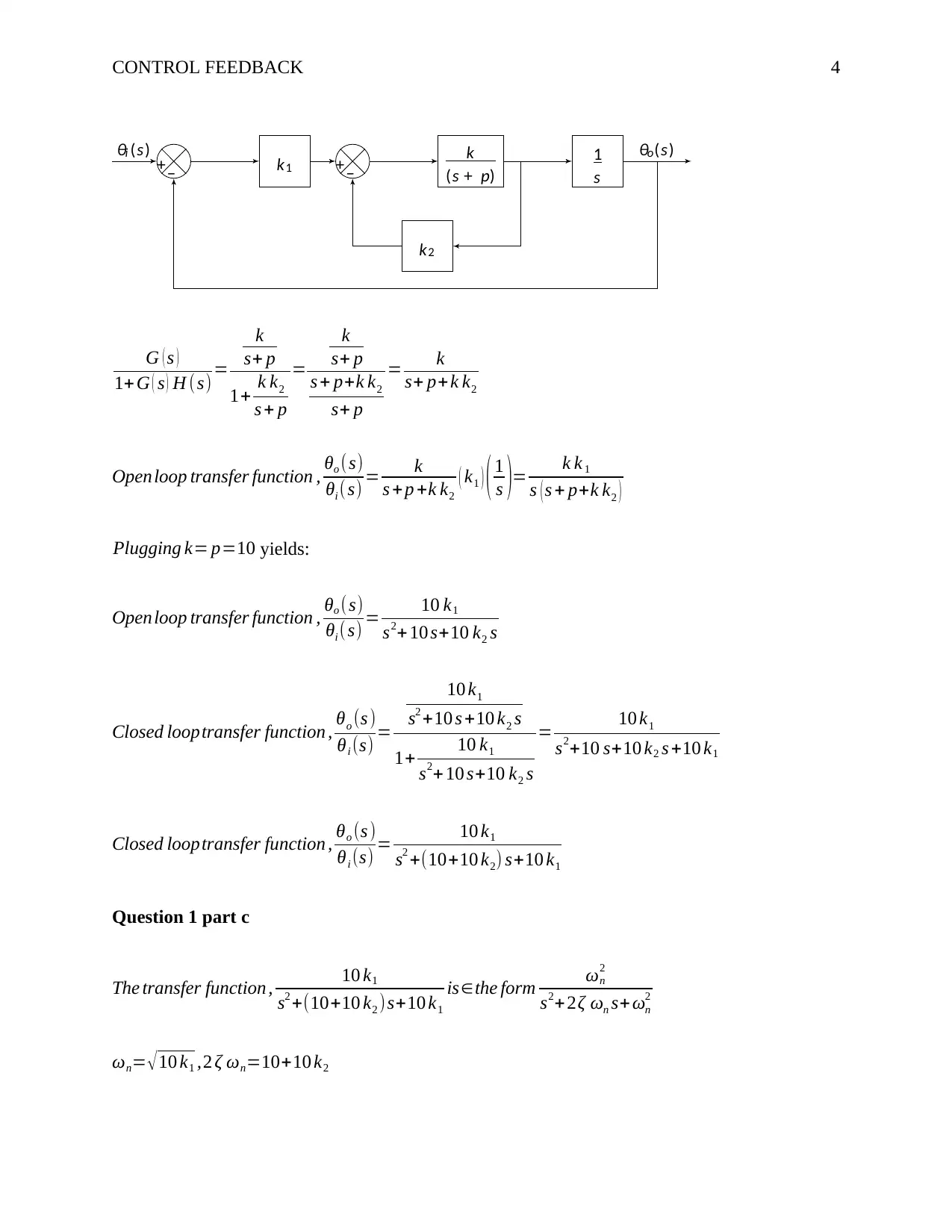
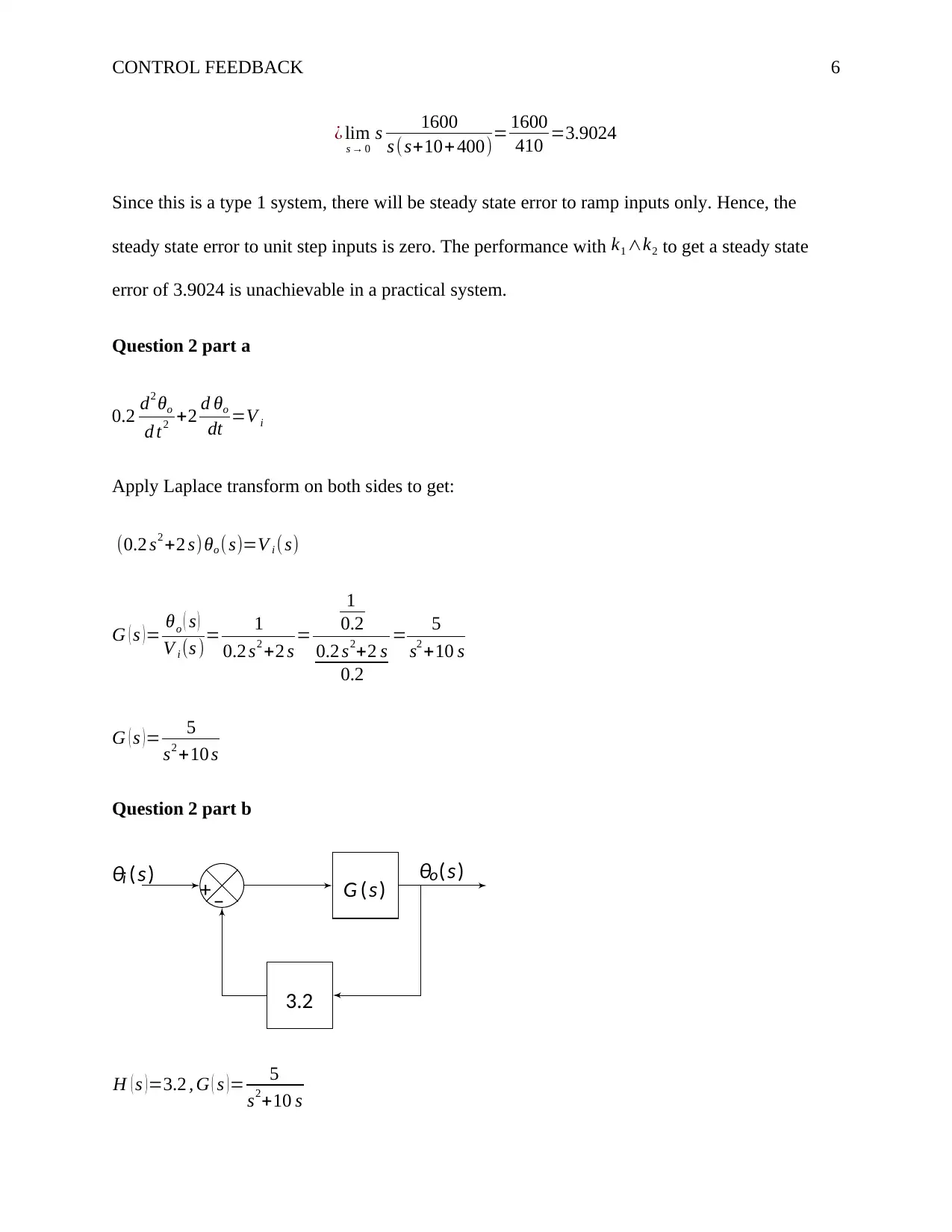
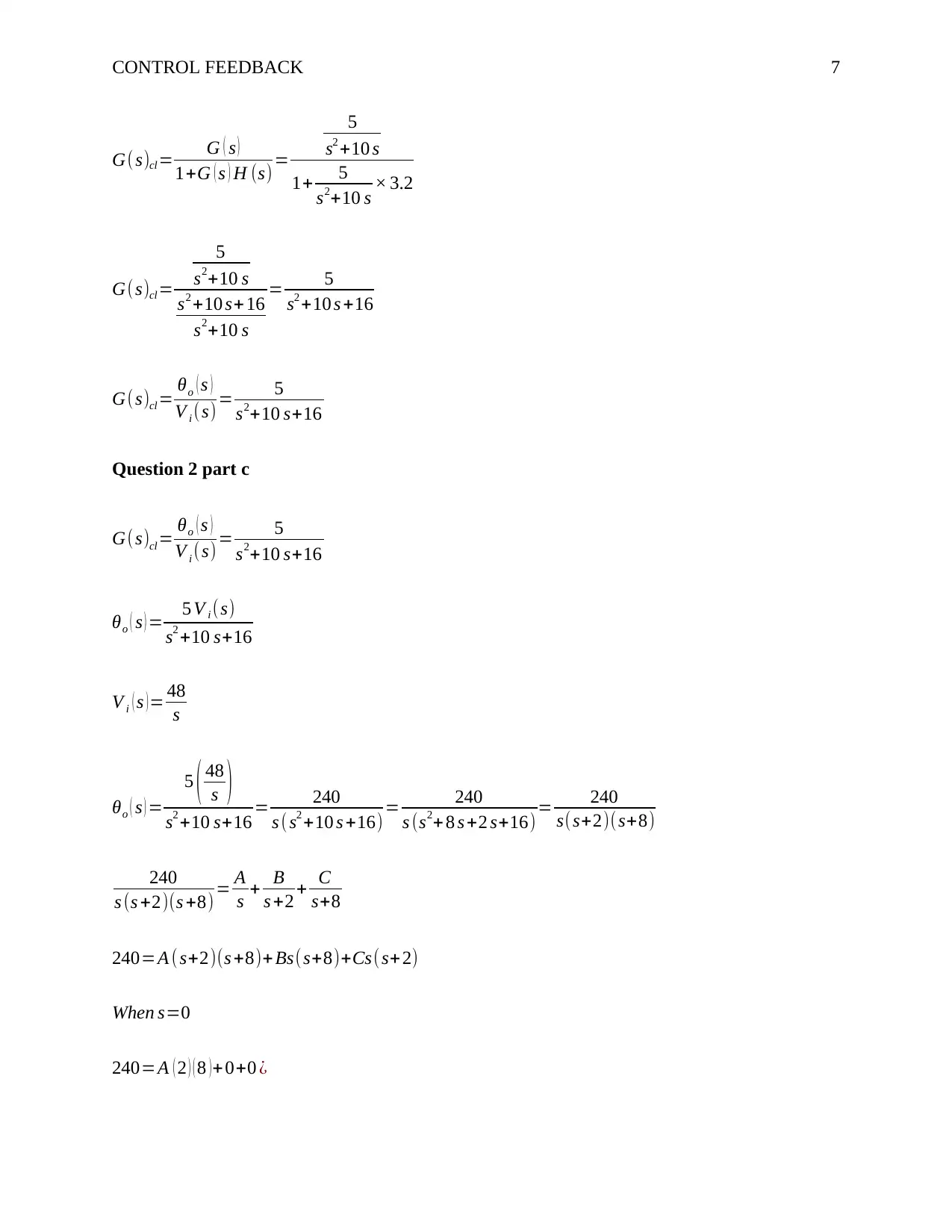
This document provides a comprehensive solution to a control feedback analysis assignment. The solution covers various aspects of control systems, including the analysis and design of feedback loops. It begins with determining system parameters (k and p) based on step response characteristics, such as settling time and overshoot. The assignment then delves into closed-loop transfer functions with additional feedback signals and investigates the impact of gain parameters (k1 and k2) on system performance. The document includes calculations and analysis of steady-state error, alongside the use of Laplace transforms to model system behavior. Furthermore, the solution incorporates Nyquist and Bode plots, demonstrating stability analysis and the application of compensators. The MATLAB code is provided, demonstrating the simulation and analysis of the control systems and the impact of different control strategies on system performance, including calculations of gain and phase margins. The solution also includes the application of compensators, providing a thorough understanding of control system design.




1 out of 19
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.