Analysis and Control of a Rotary Inverted Pendulum System (ROTPEN)
VerifiedAdded on 2021/11/03
|25
|2647
|97
Project
AI Summary
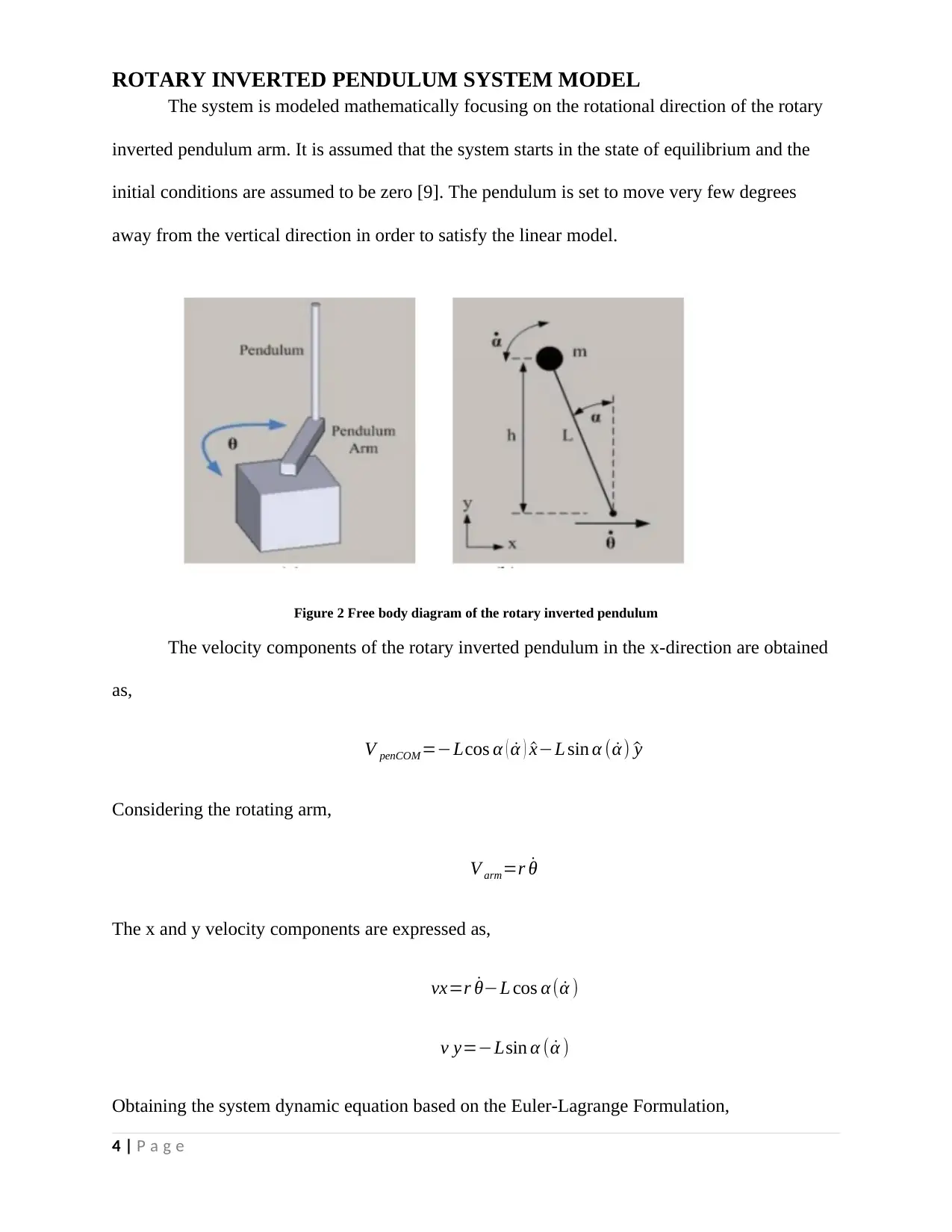
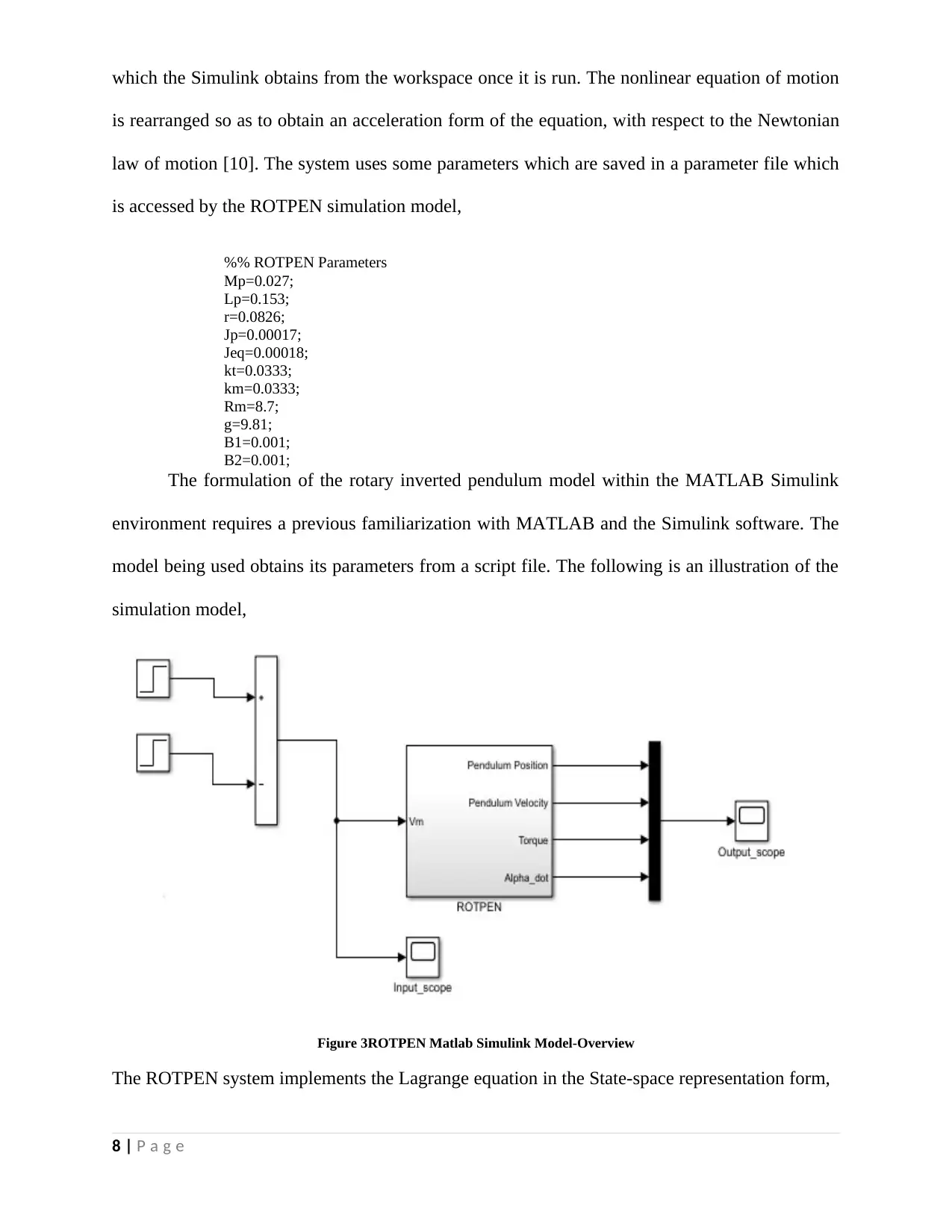
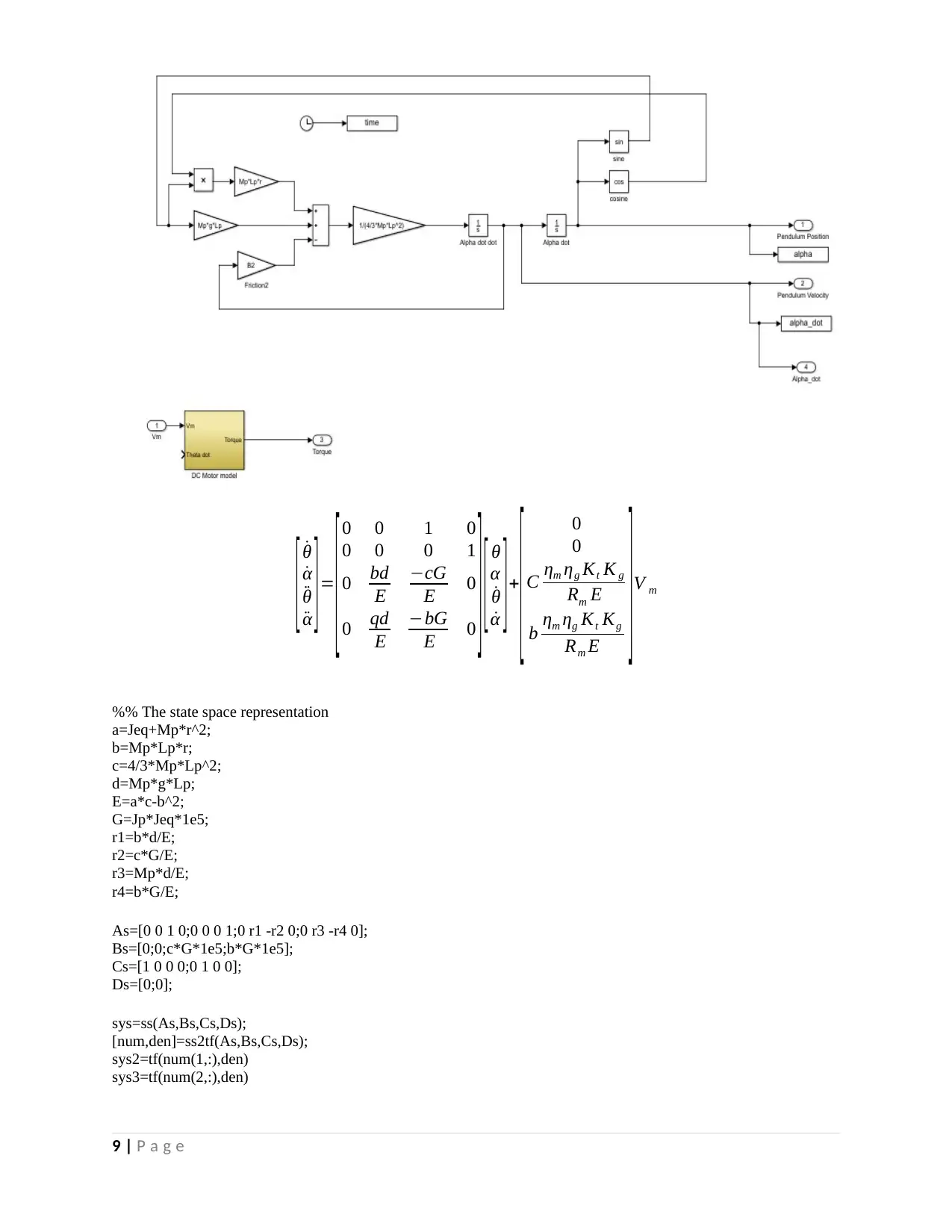
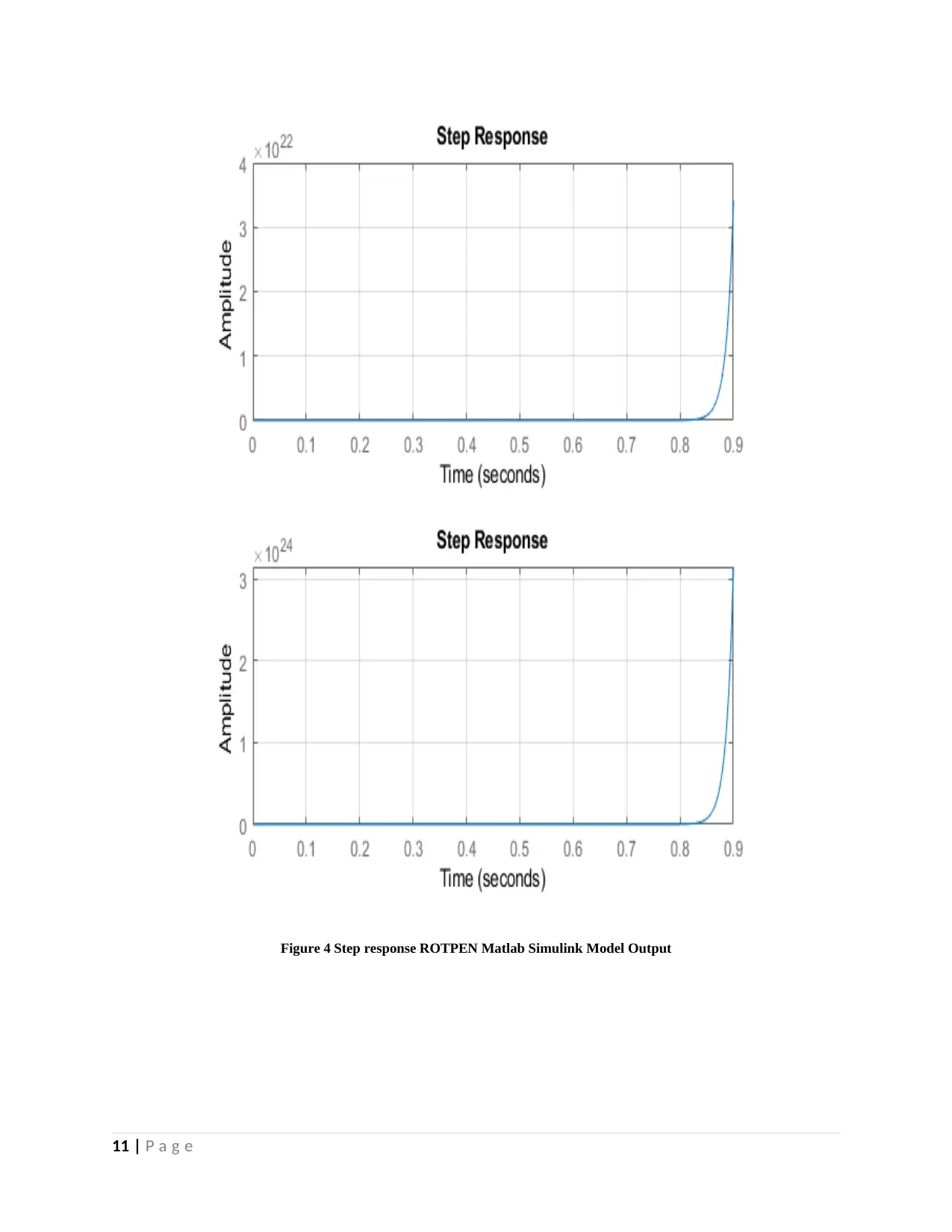
This lab report analyzes the control and instrumentation of a rotary inverted pendulum (ROTPEN) system. The report begins with an introduction to the system and its applications, followed by the aims of the experiment, which include linearizing the nonlinear system, defining its state-space representation, designing a state-feedback controller, and simulating both open-loop and closed-loop systems. The report then details the mathematical modeling of the ROTPEN system, using Euler-Lagrange equations to derive the equations of motion. A Simulink model is developed and discussed, including the parameters, and the state-space representation. Controller design, including open-loop and closed-loop system simulations, and the application of pole placement techniques are presented. The report includes figures illustrating the system's behavior, such as step responses, Bode diagrams, and root locus plots. The discussion section compares different control schemes and the conclusion summarizes the findings and suggests future work. The report also includes references to related literature.



1 out of 25
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.