Rotary Position Control System for Hydraulic Cylinder Project
VerifiedAdded on 2022/01/03
|15
|1198
|18
Project
AI Summary
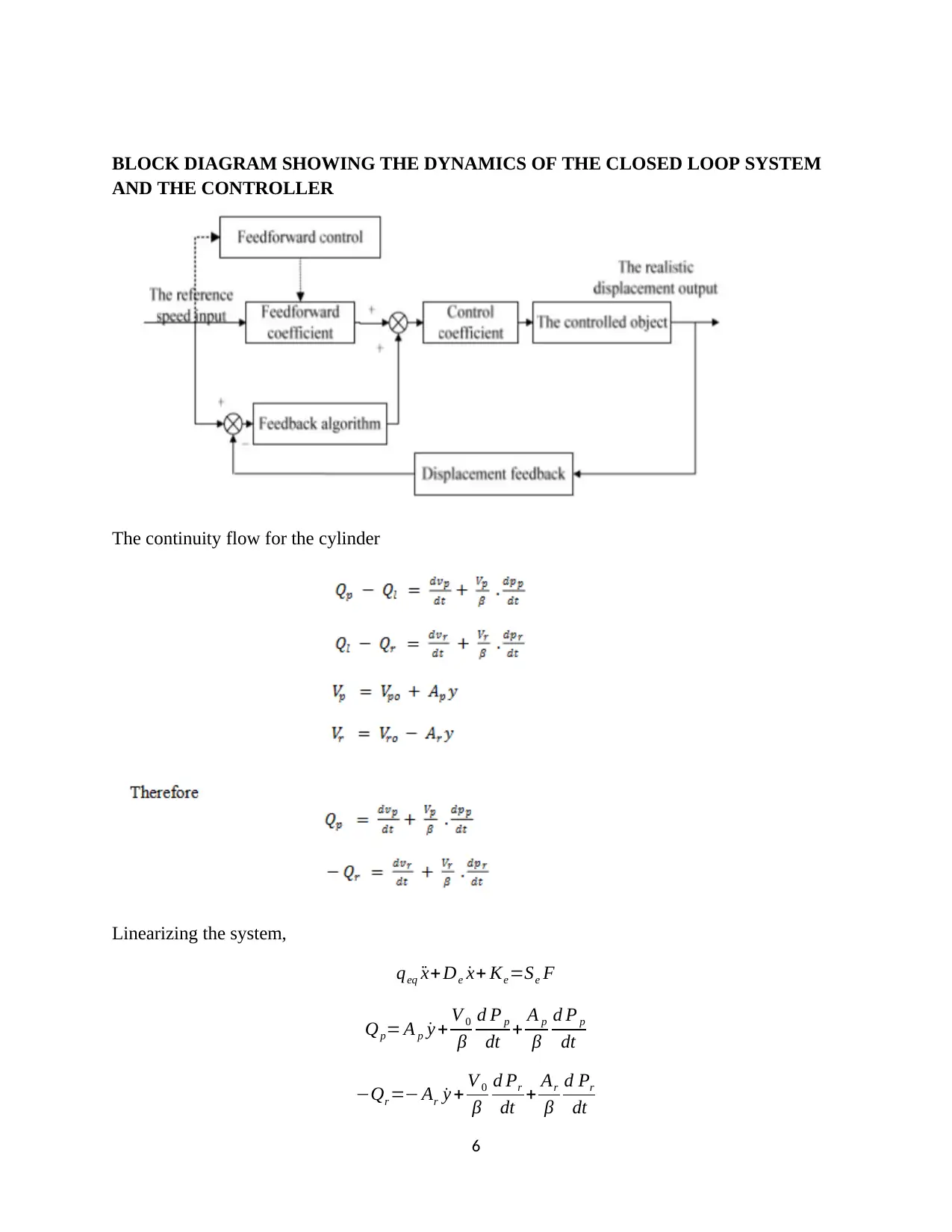
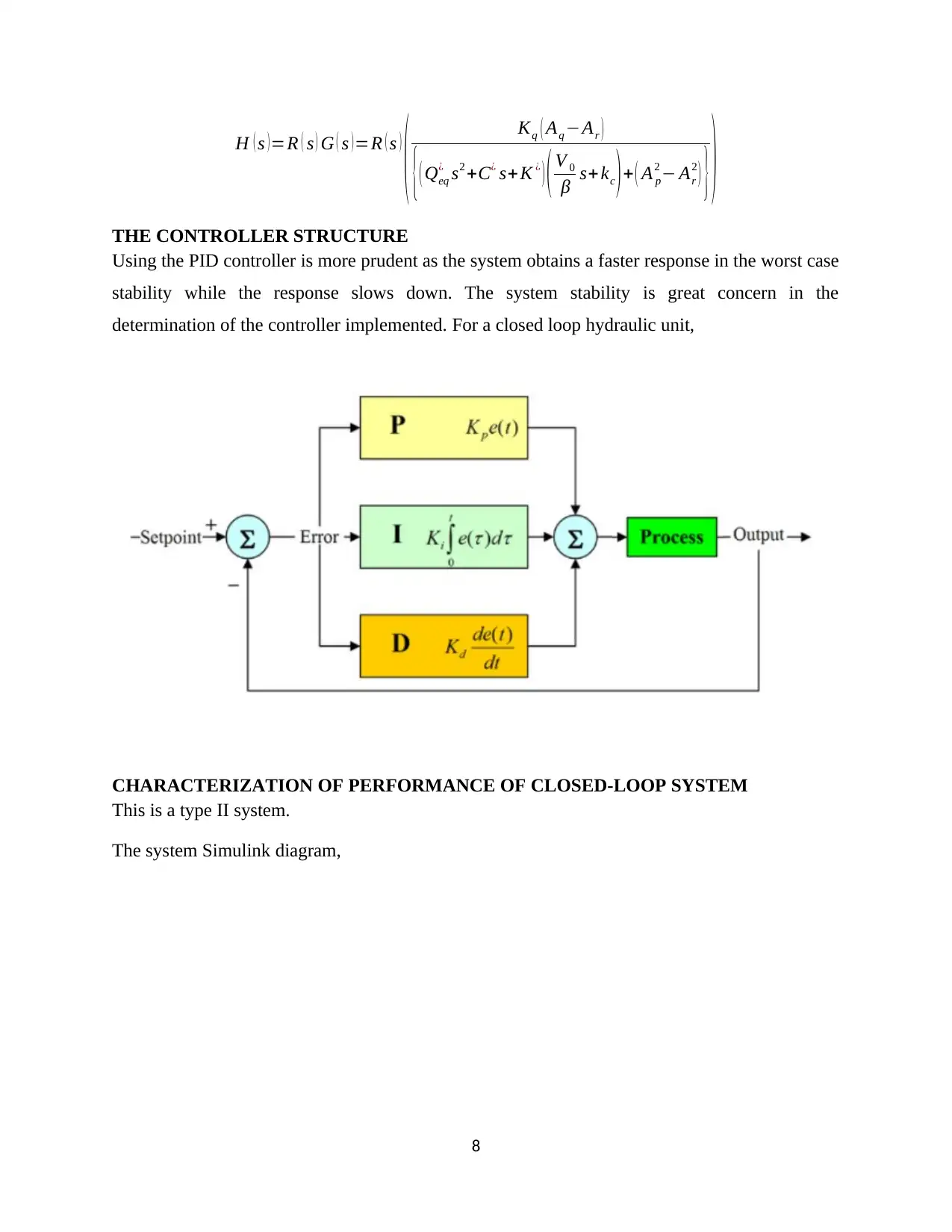
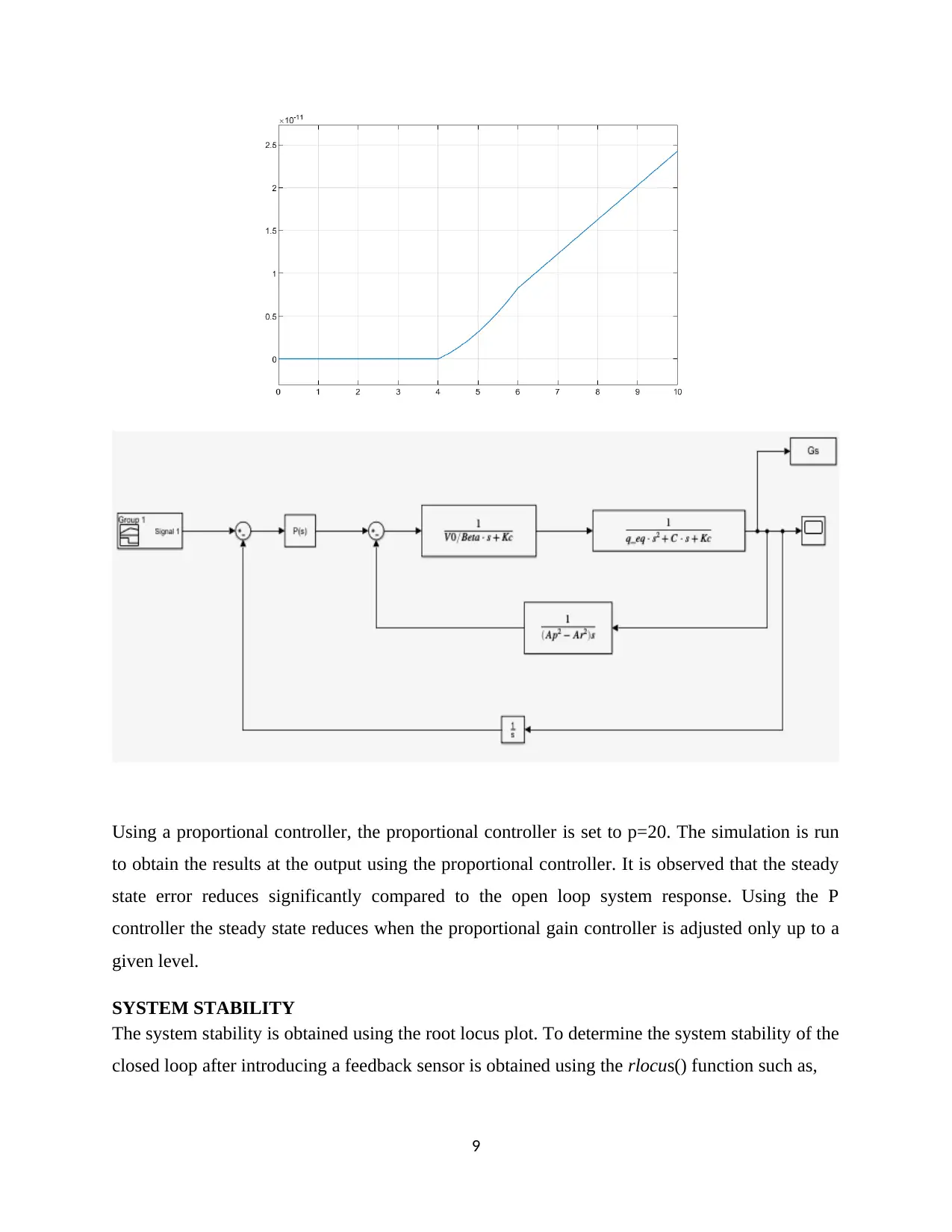
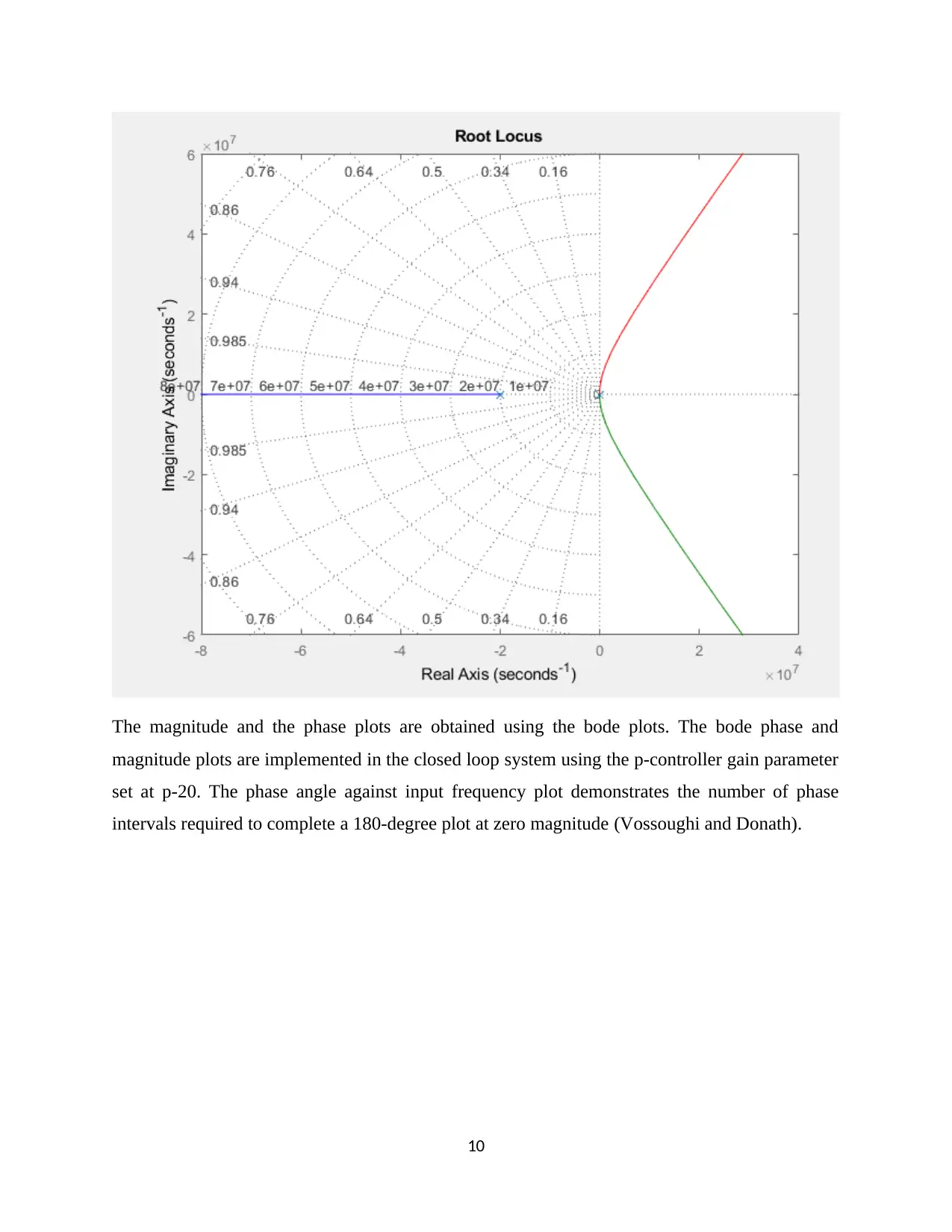
This project analyzes a hydraulic cylinder control system, focusing on its rotary position control with a torsion spring. The assignment begins with an introduction to hydraulic systems and their applications, followed by a detailed explanation of system parameters and dynamic modeling. The core of the project involves developing a block diagram and transfer function to represent the system's behavior. The student then explores the design and implementation of a PID controller to enhance system performance, discussing the characterization of the closed-loop system. System stability is evaluated using root locus and Bode plots, providing insights into the system's response. The project concludes with a summary of findings and a reference list. The appendix includes MATLAB code for simulations and analysis, demonstrating the practical application of the theoretical concepts discussed.



1 out of 15


Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2025 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.