Control Systems Design: Plant Analysis and Controller Design
VerifiedAdded on 2022/09/18
|14
|2382
|26
Project
AI Summary
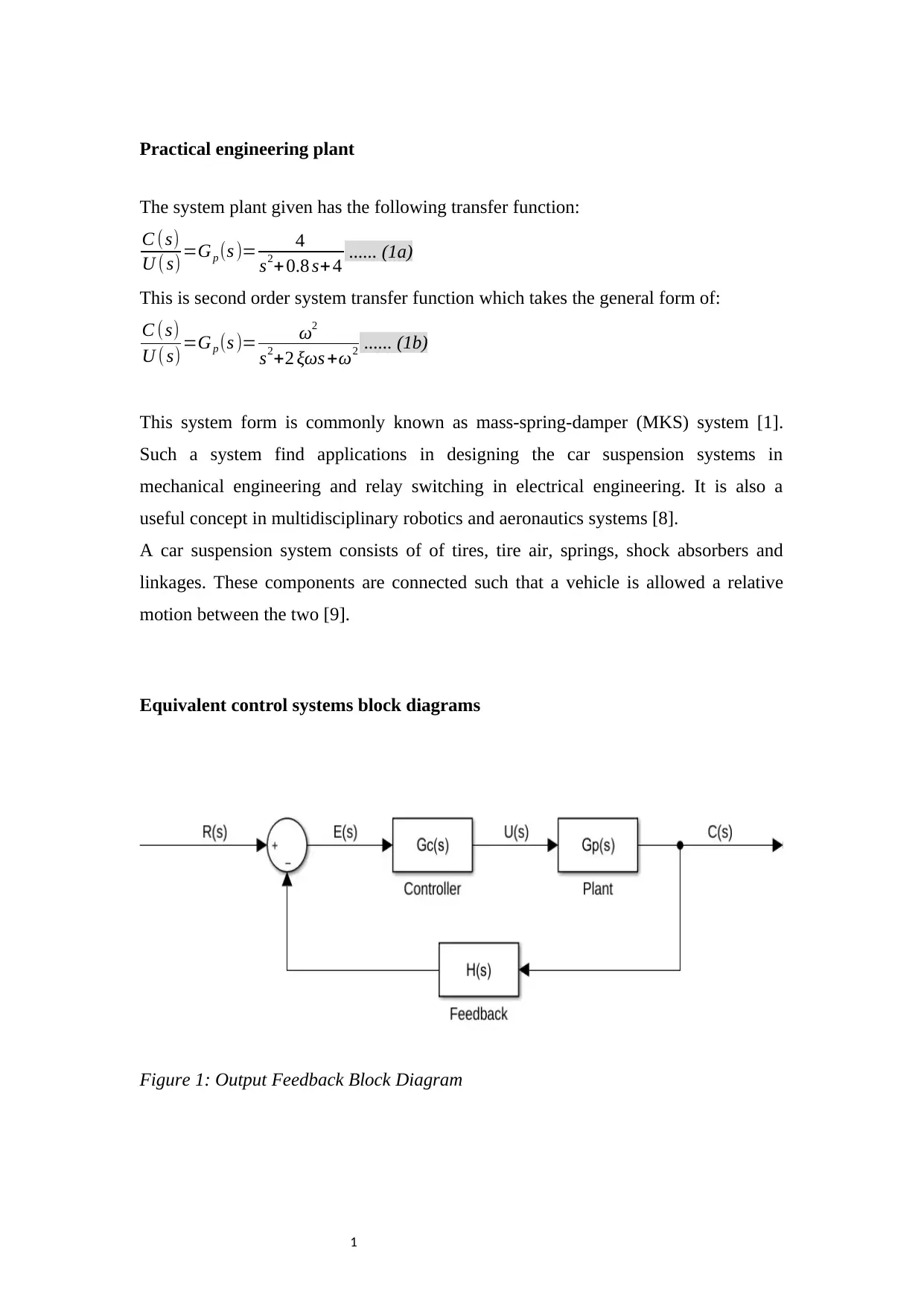
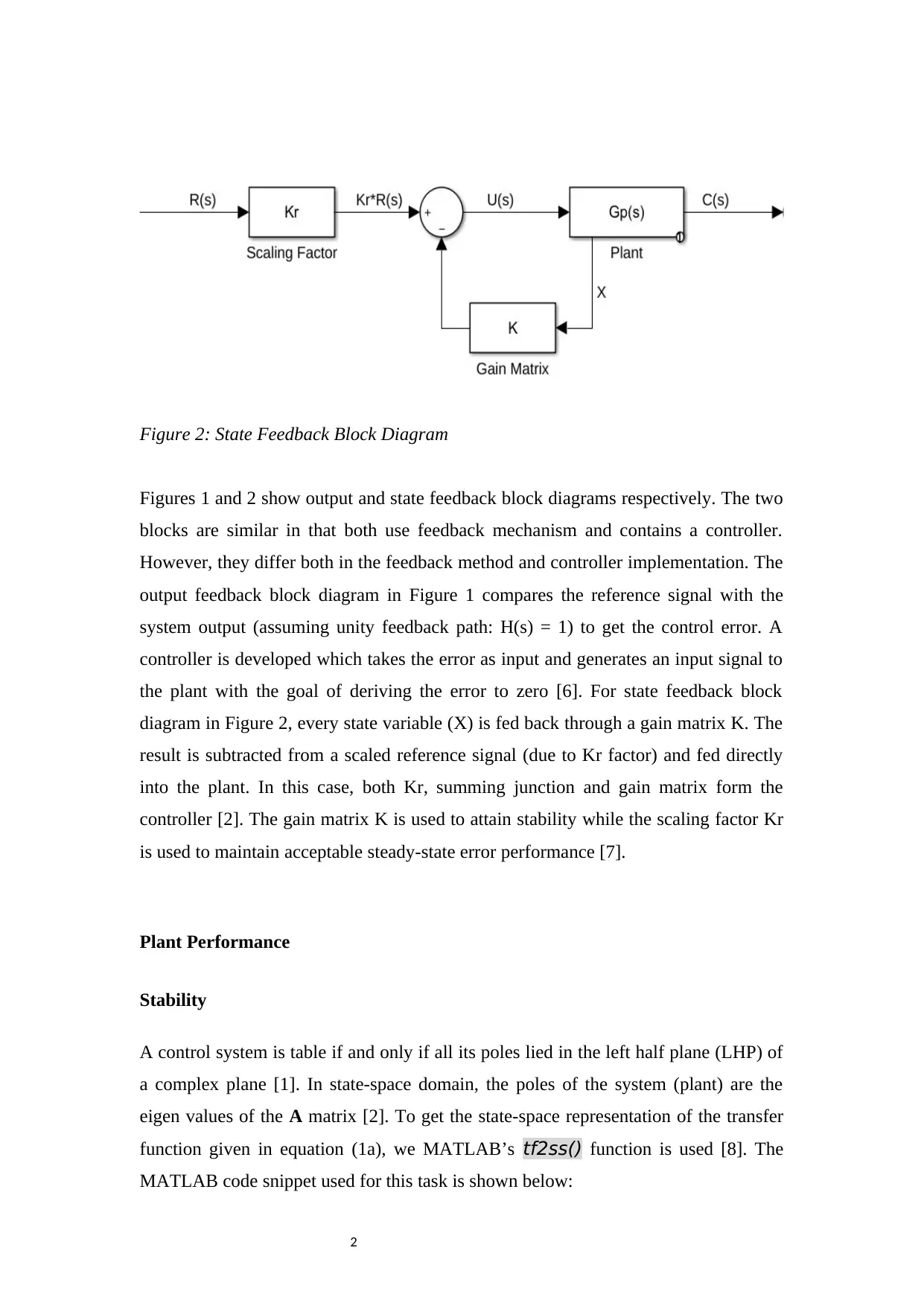
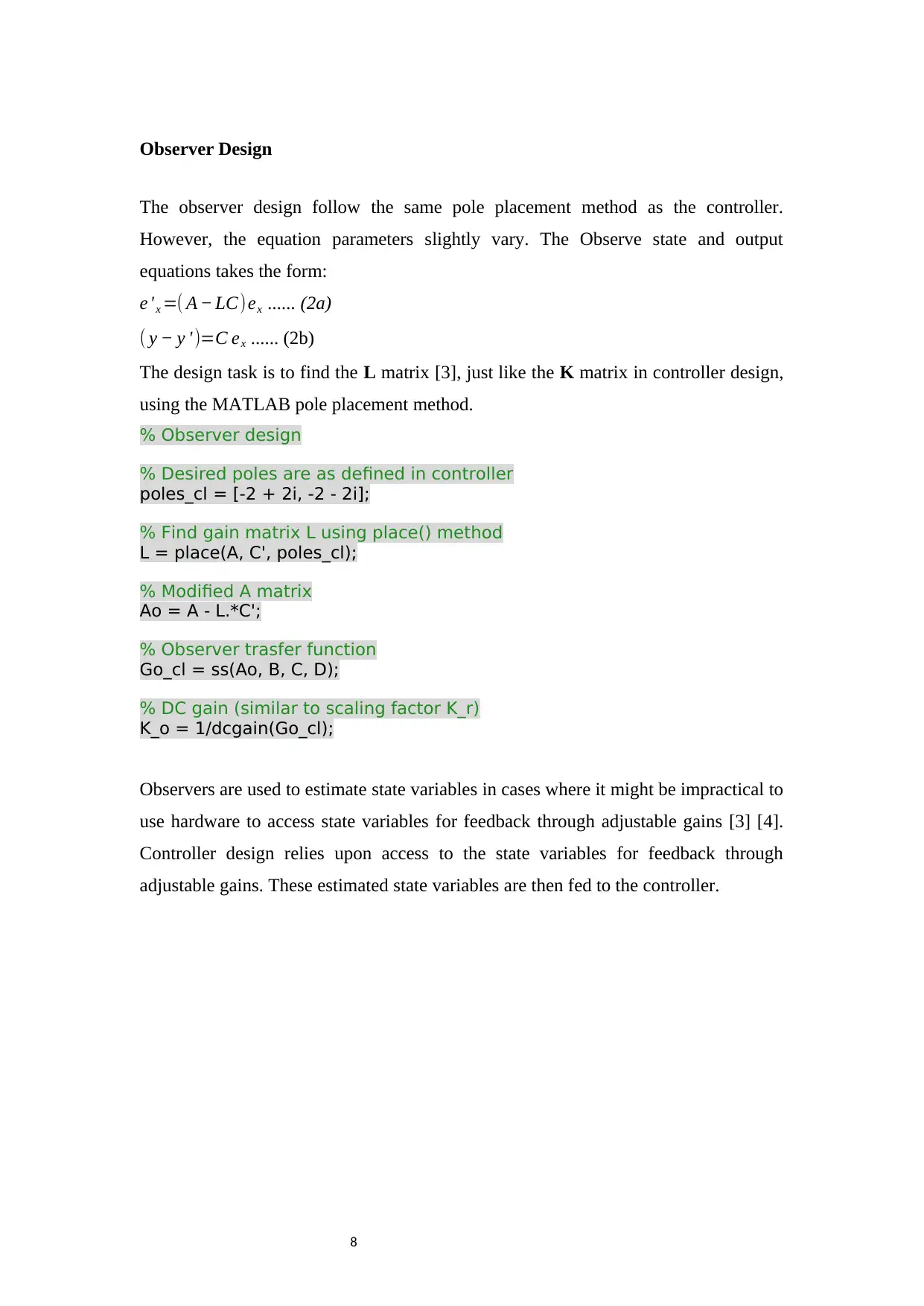
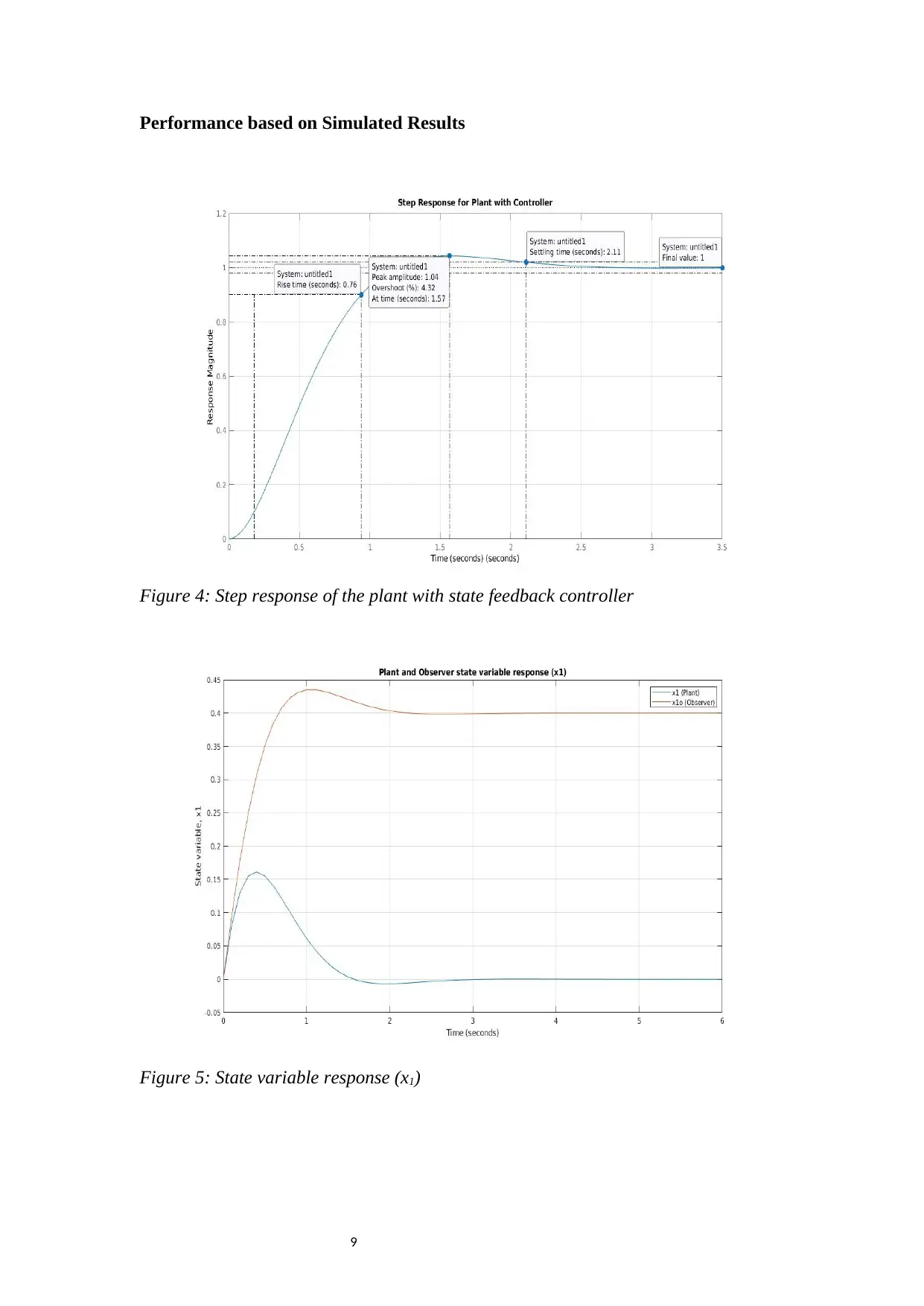
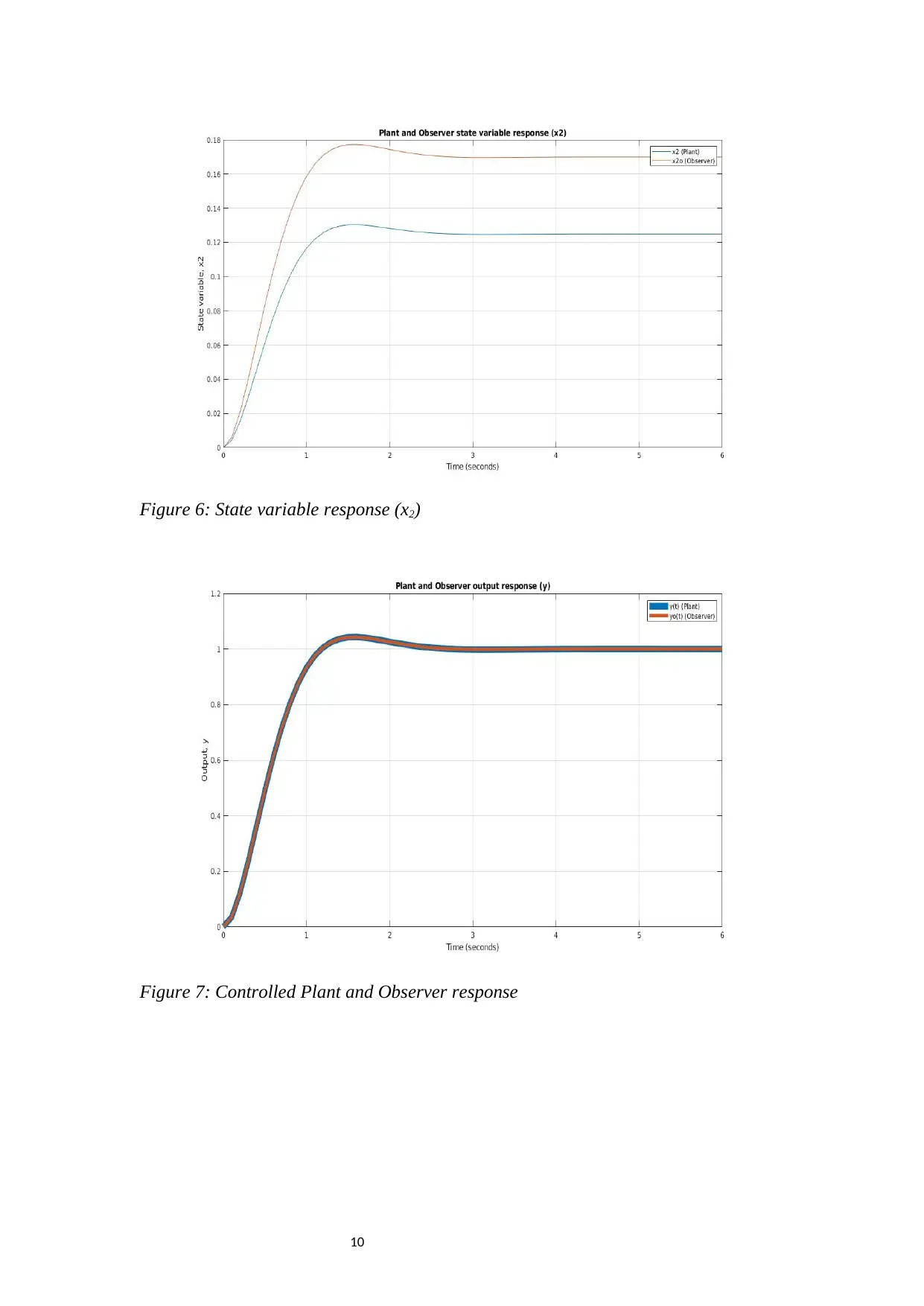
This project report details the design and analysis of a control system, focusing on a second-order plant represented by a transfer function. The report begins with an overview of the plant, including its transfer function and its application as a mass-spring-damper system, with equivalent control systems block diagrams. The project then investigates the plant's performance, examining its stability, observability, and controllability using MATLAB. The subsequent sections focus on designing a state feedback controller and an observer using pole-placement techniques to improve the system's response characteristics, specifically reducing overshoot and settling time. The design process includes simulating the system in MATLAB and analyzing the step response. The results demonstrate the effectiveness of the designed controller and observer in enhancing the plant's performance. The project also highlights the importance of simulation in engineering designs, showcasing how it provides valuable insights and allows for performance optimization before hardware implementation. The report concludes with a bibliography of relevant sources.

1 out of 14
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2025 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.