Controller Design for Transient Response Improvement Report
VerifiedAdded on 2023/06/12
|2
|677
|500
Report
AI Summary
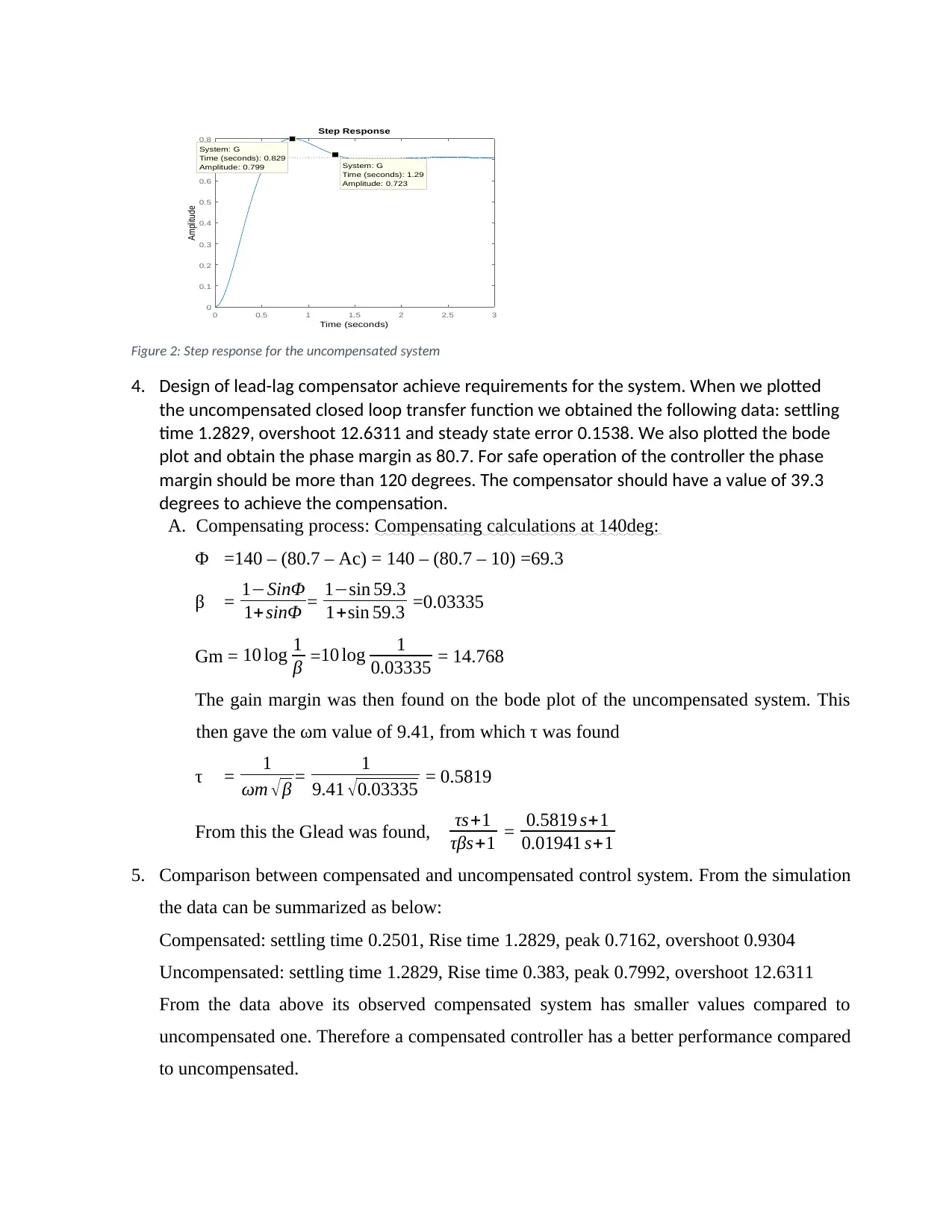
This report presents an analysis of transient response improvement through controller design. It begins by calculating the values of k and dominant poles for a given open-loop transfer function. The report then demonstrates the location of poles on the root locus and discusses desired performance characteristics such as settling time, overshoot, and steady-state error. A lead-lag compensator is designed to meet these requirements, and a comparison is made between the compensated and uncompensated control systems, highlighting the improved performance achieved through compensation. The simulation data shows that the compensated system has smaller settling time, rise time, peak and overshoot compared to the uncompensated system.

1 out of 2
Related Documents





Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.