ENEM14015 CQU Lab Report: Dynamic System Modelling Analysis
VerifiedAdded on 2020/03/16
|18
|2750
|76
Report
AI Summary
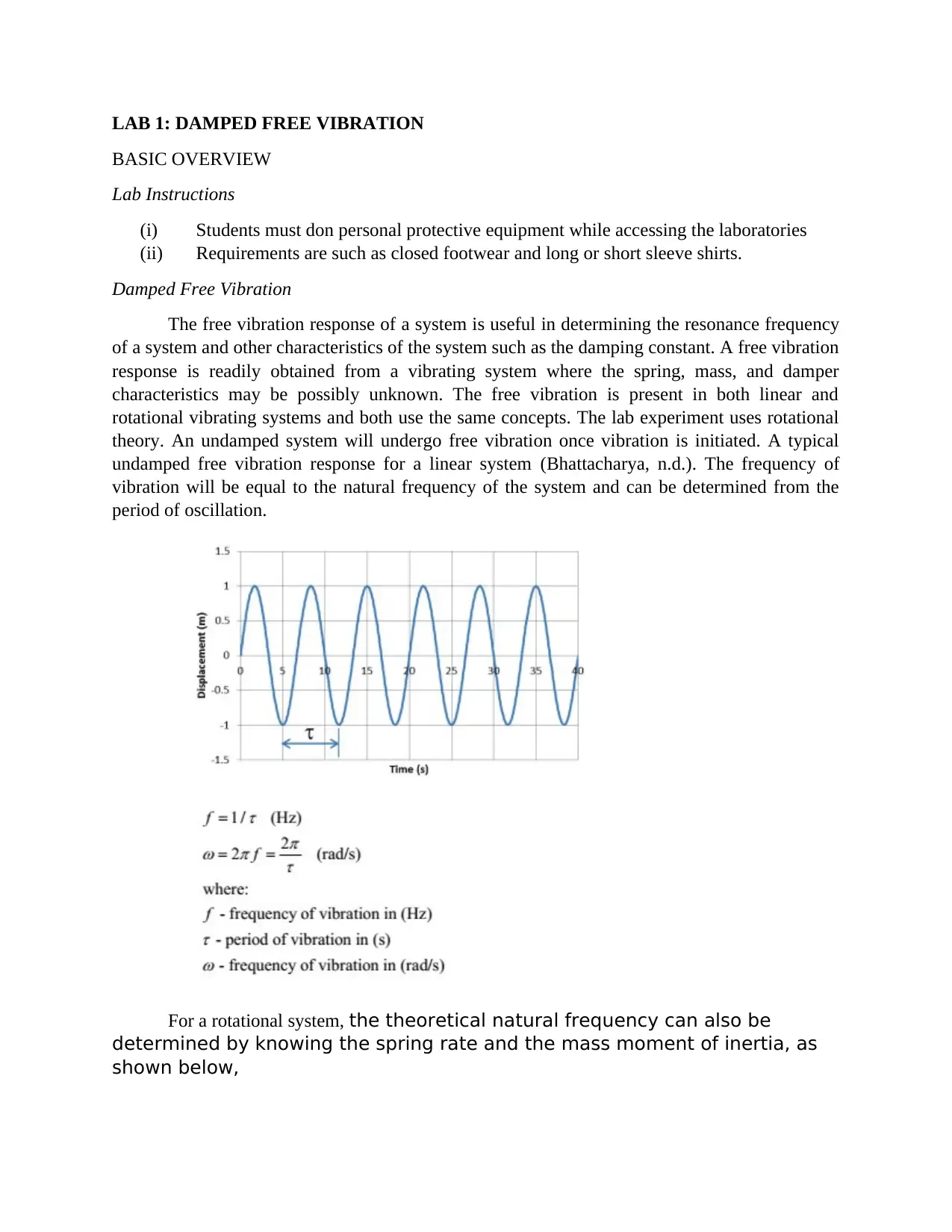
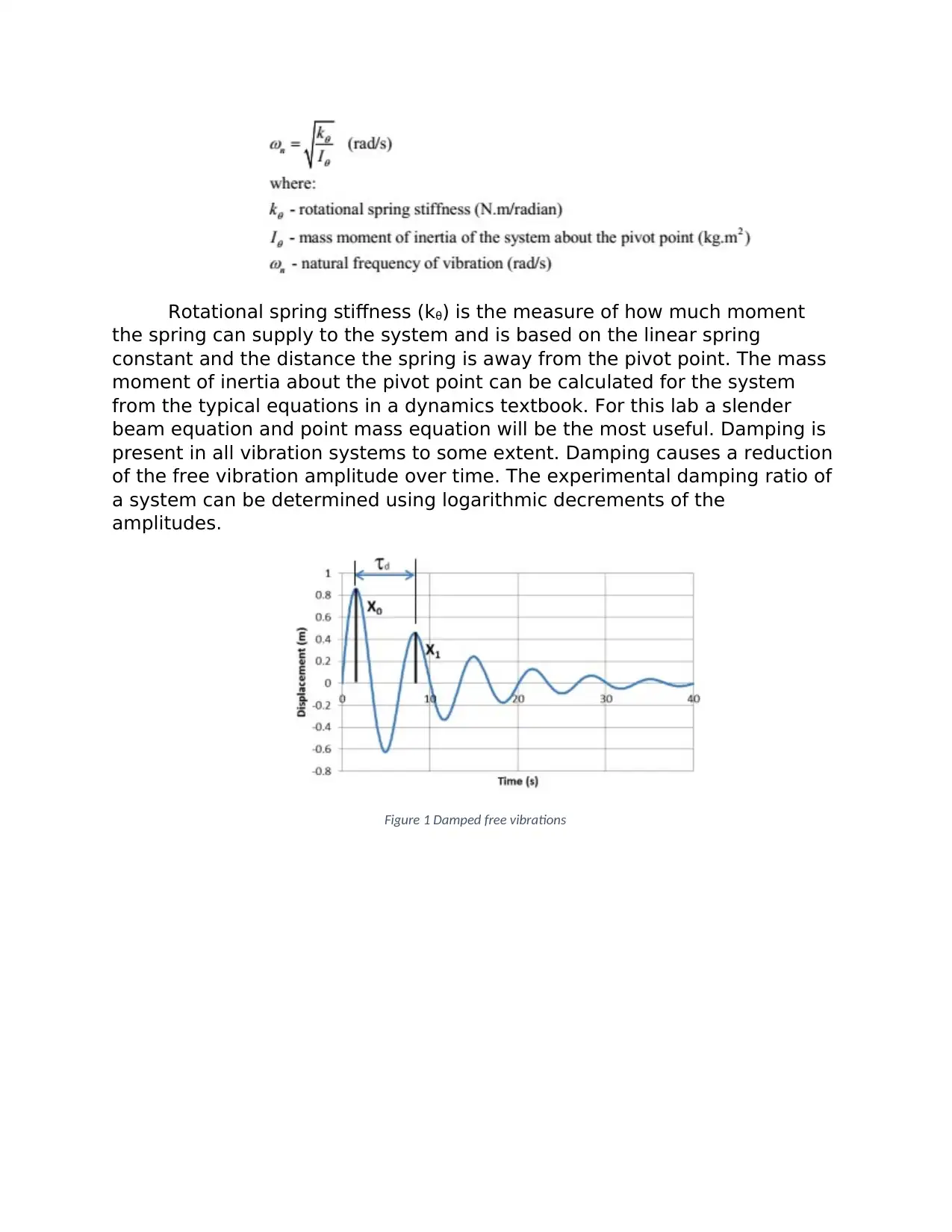
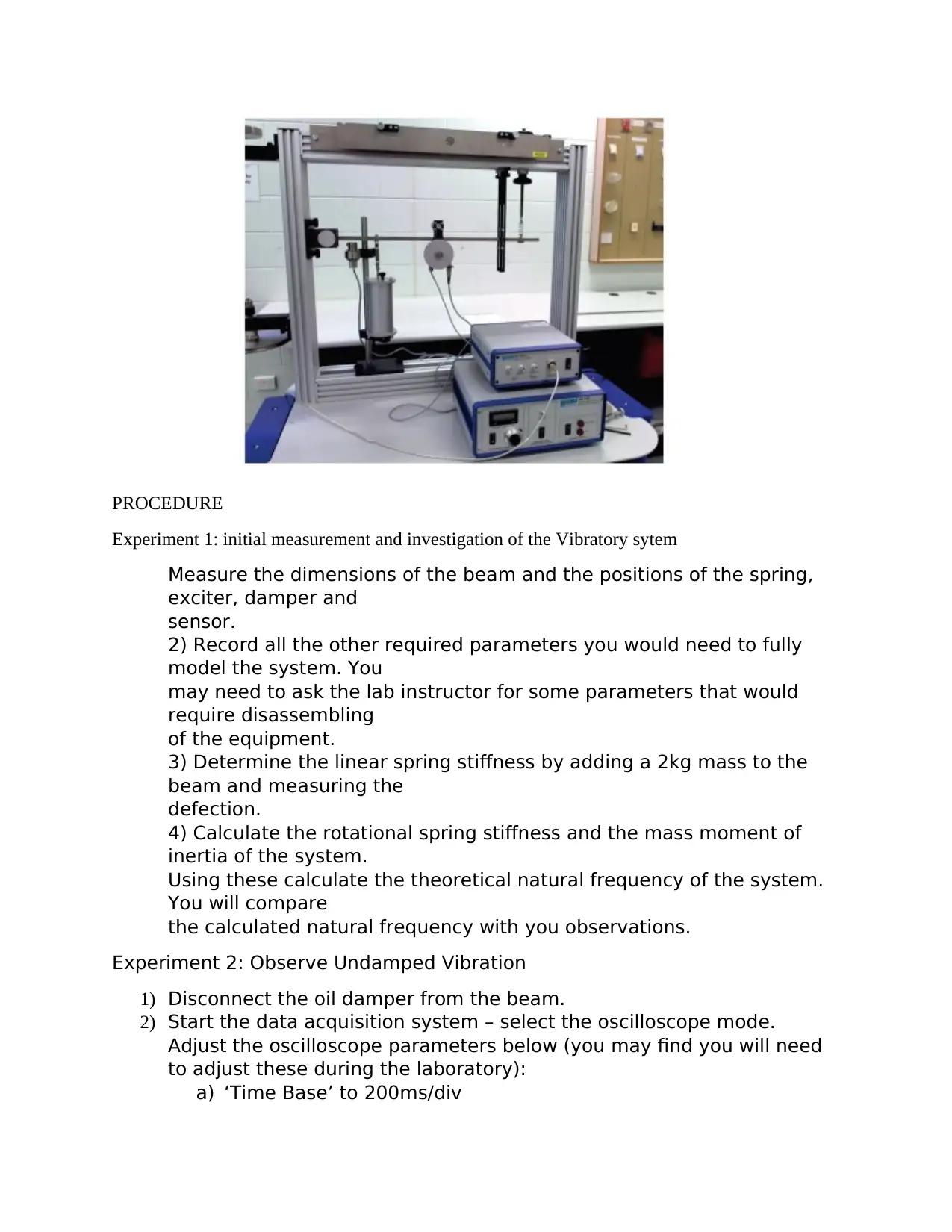
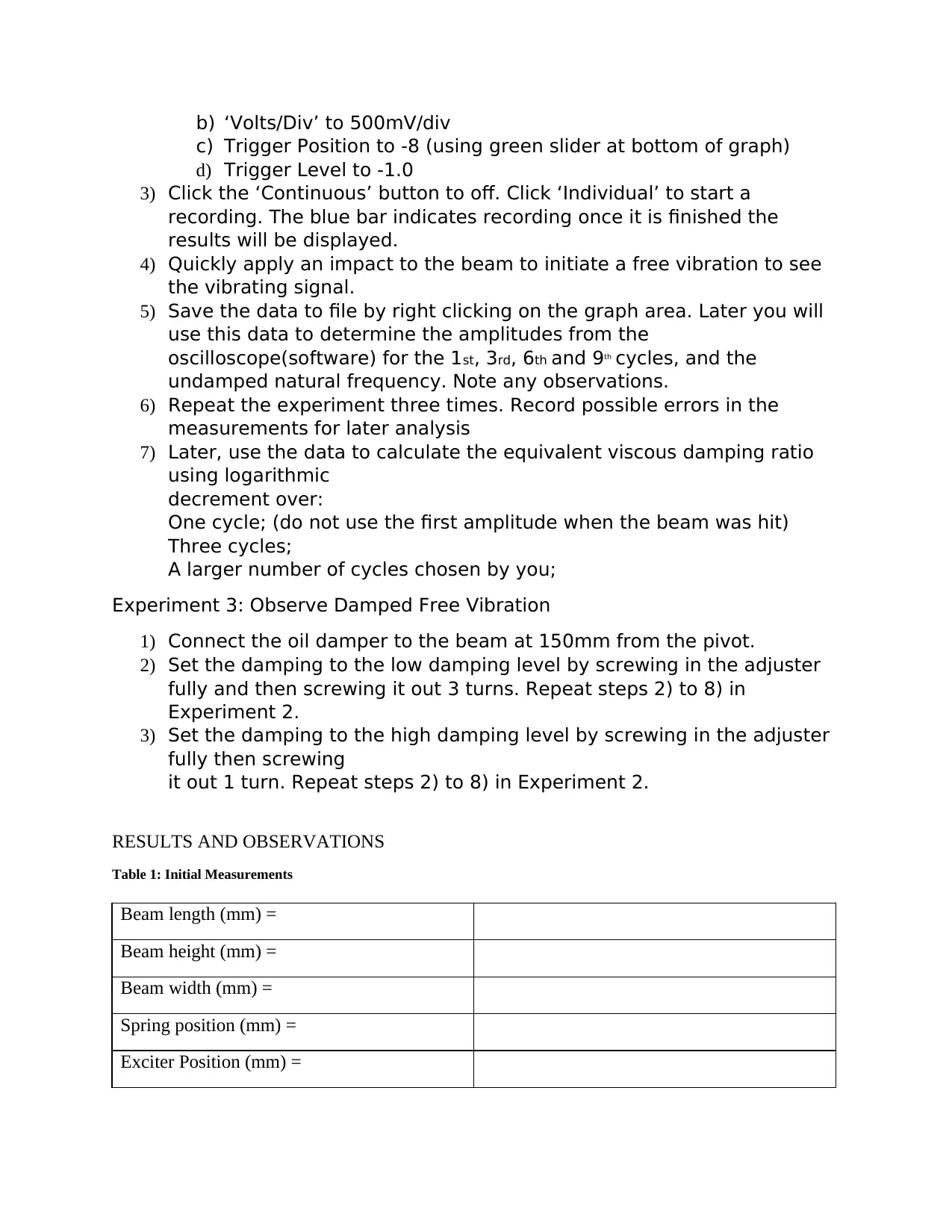
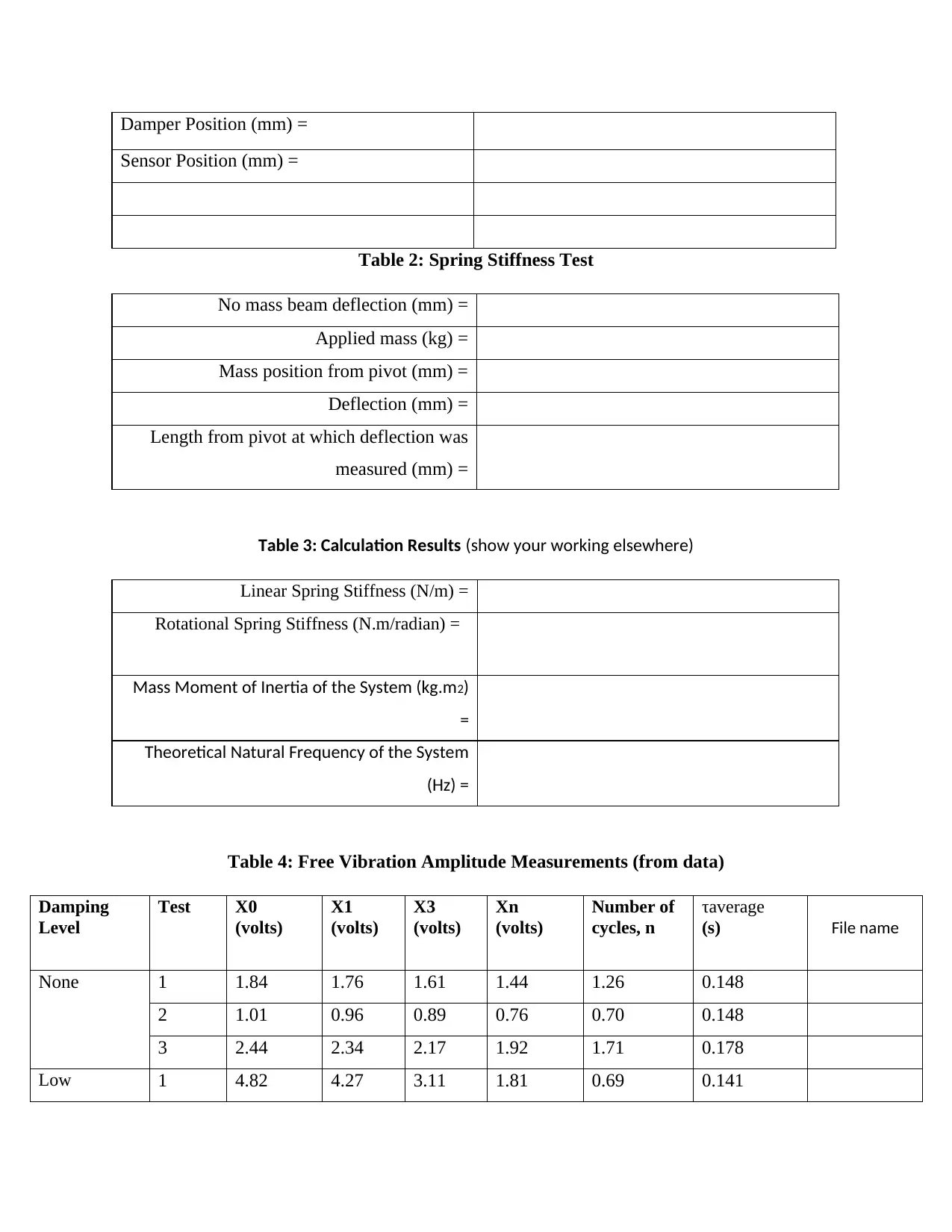
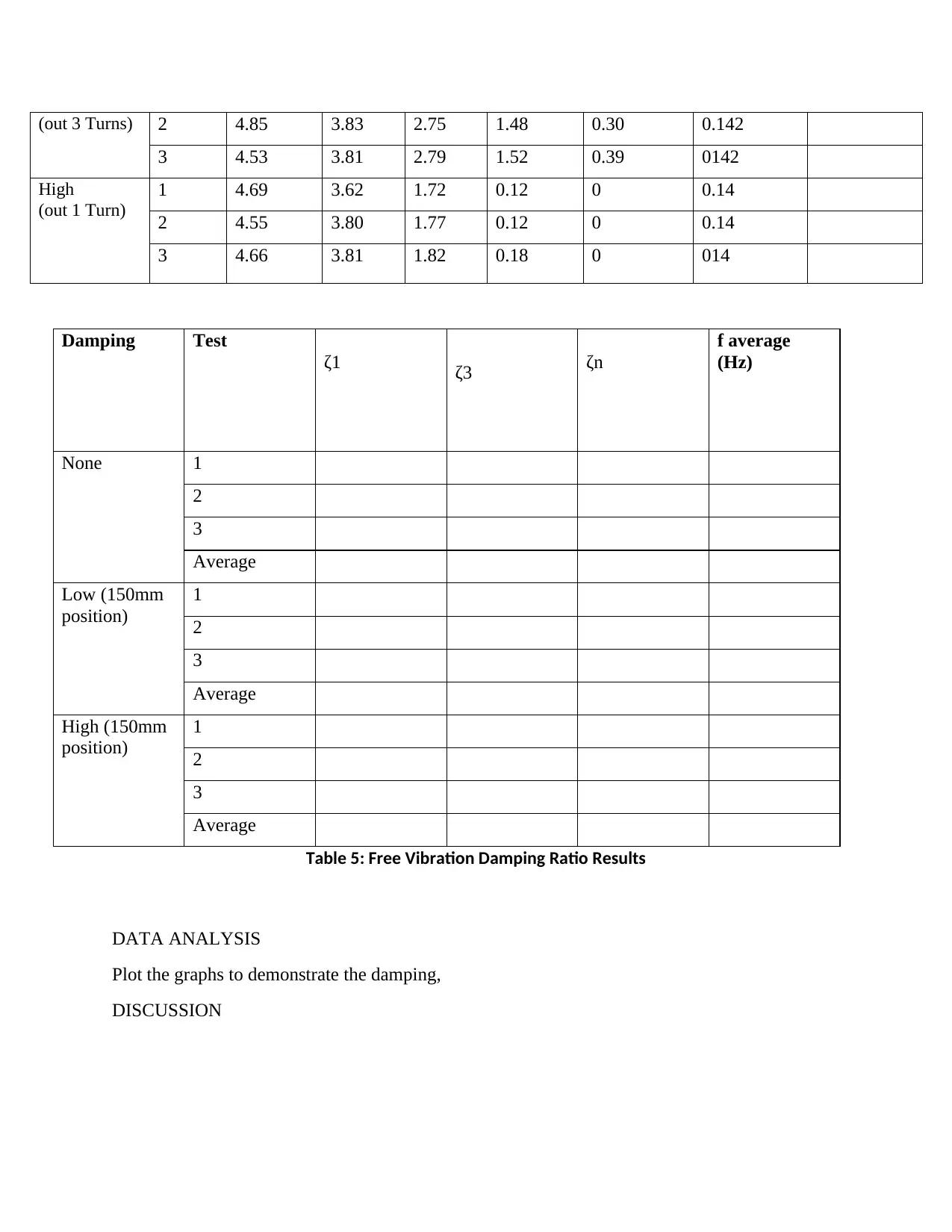
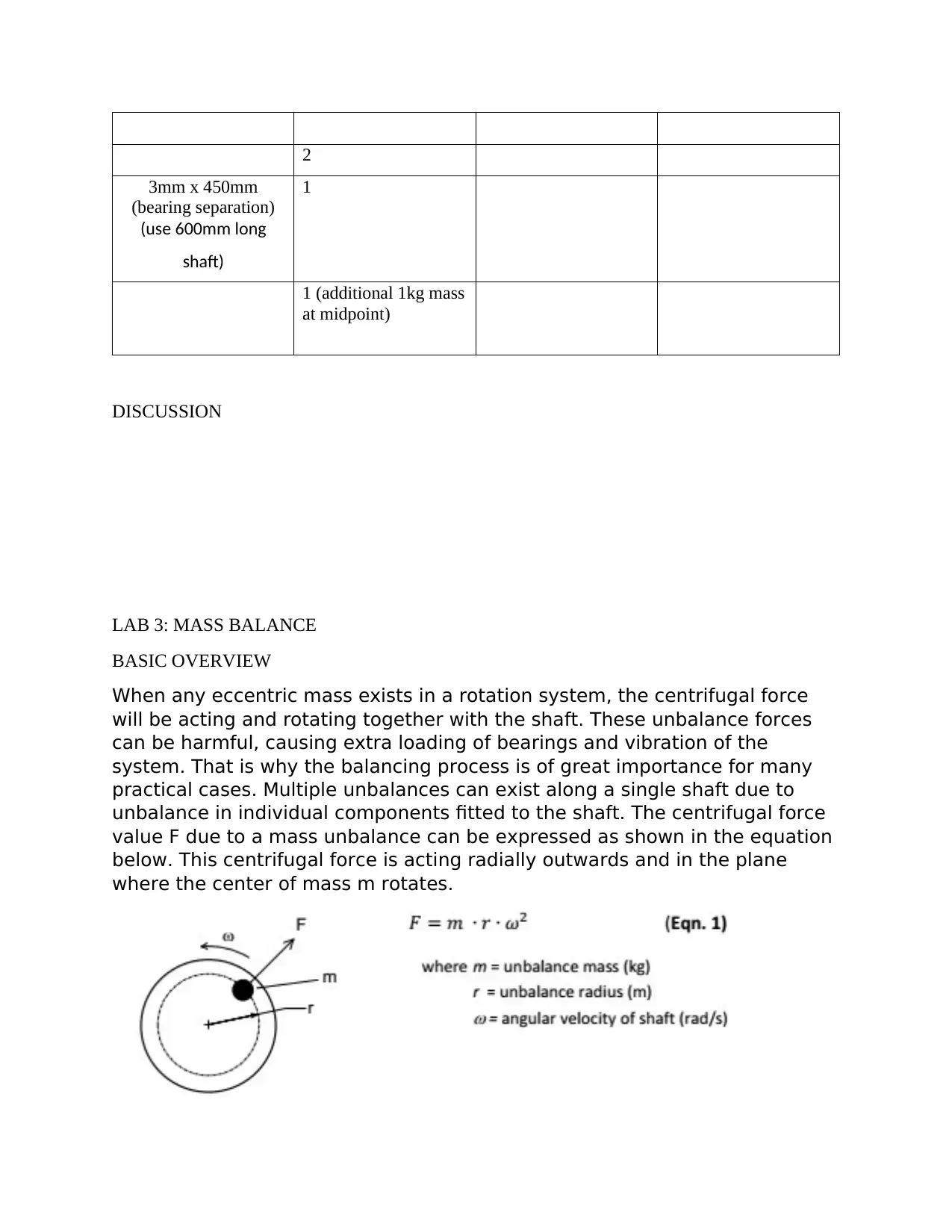
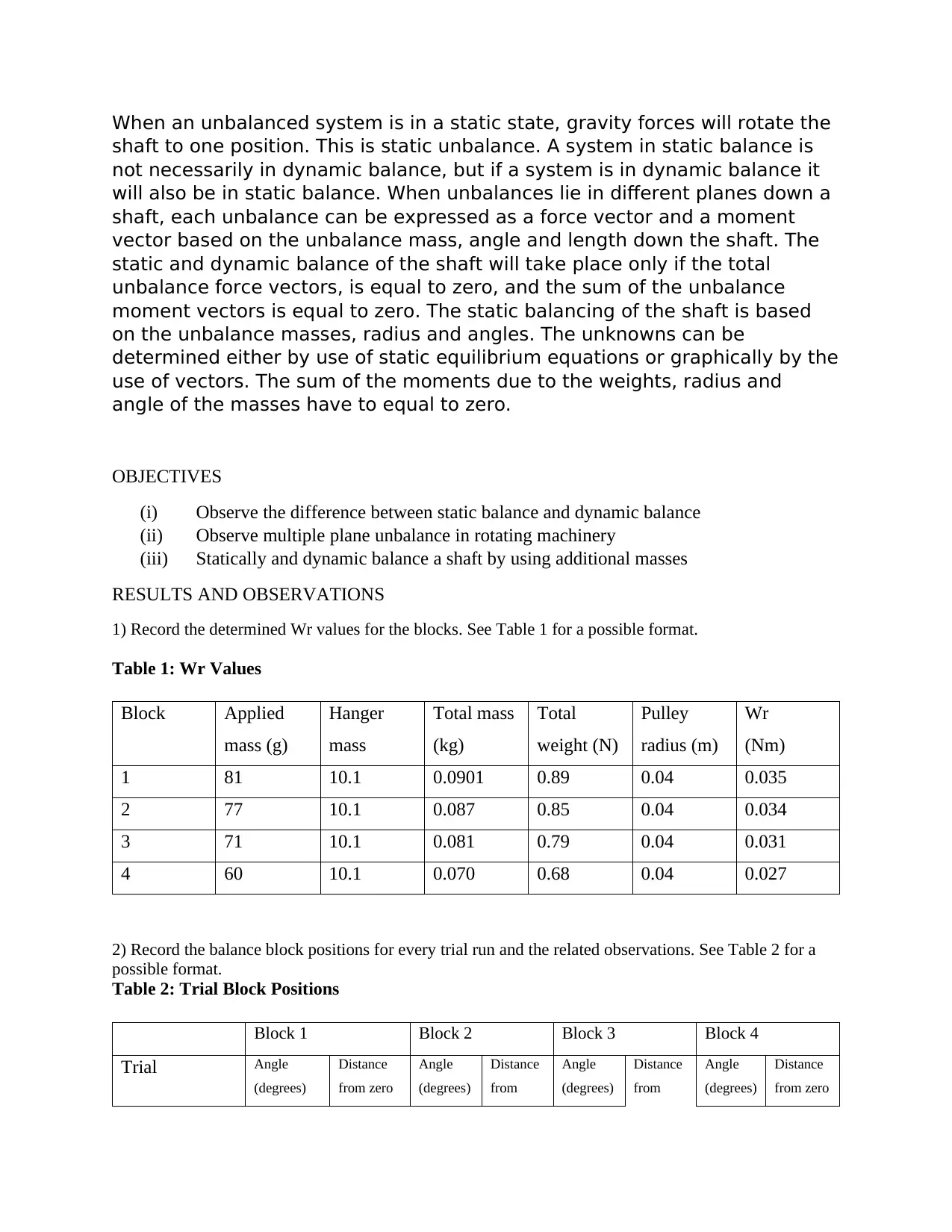
This lab report, prepared for ENEM14015 at Central Queensland University, details experiments on damped free vibration. The report covers the theoretical background of damped free vibration, including concepts of rotational spring stiffness, mass moment of inertia, and damping. The experiments involved observing undamped and damped free vibrations using the GUNT Tm150 Free Vibration Equipment. The procedure included measuring system parameters, observing vibrations, and calculating the damping ratio using logarithmic decrements. The results section presents the initial measurements, spring stiffness test data, calculation results, and free vibration amplitude measurements. Data analysis involves plotting graphs to demonstrate damping, and the discussion section analyzes the effects of shaft diameter, length, and mass. Additional experiments on whirling of shafts, mass balance, and forced vibration with viscous damping are also briefly outlined, providing a comprehensive overview of dynamic system modelling concepts. Students can find more study resources on Desklib.


1 out of 18
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2025 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.