Open/Closed Loop DC Motor Speed Control with Arduino, LabVIEW Analysis
VerifiedAdded on 2023/06/15
|18
|2083
|375
Report
AI Summary
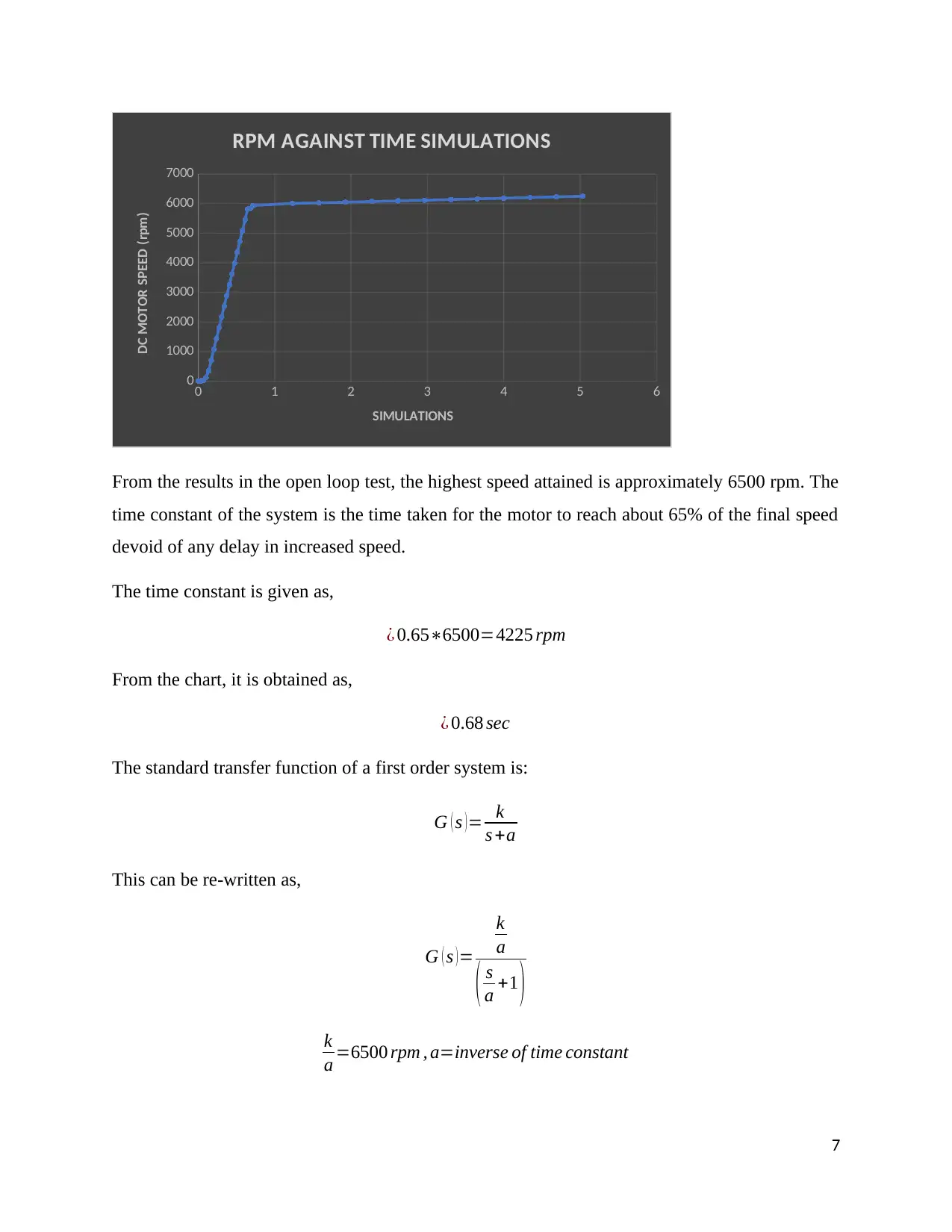
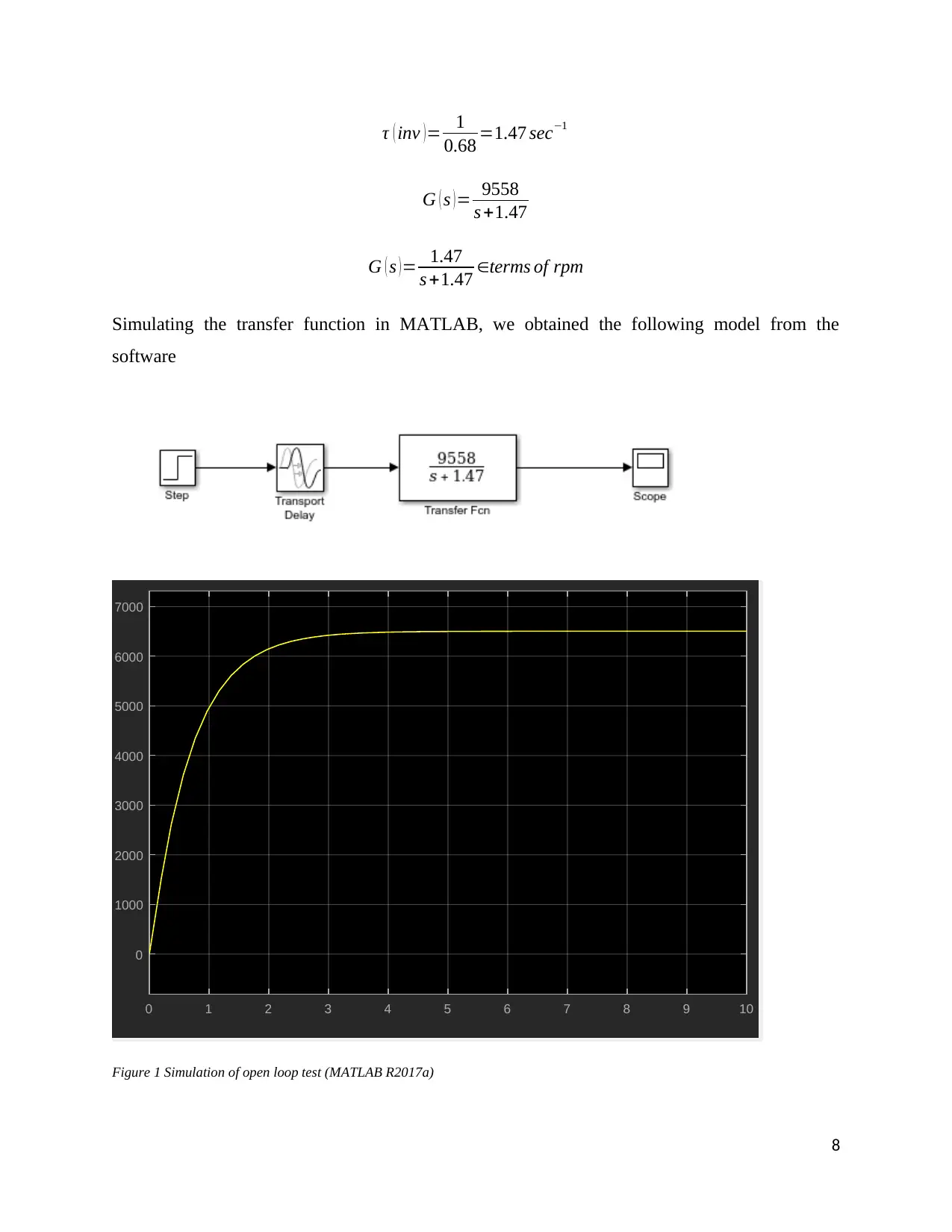
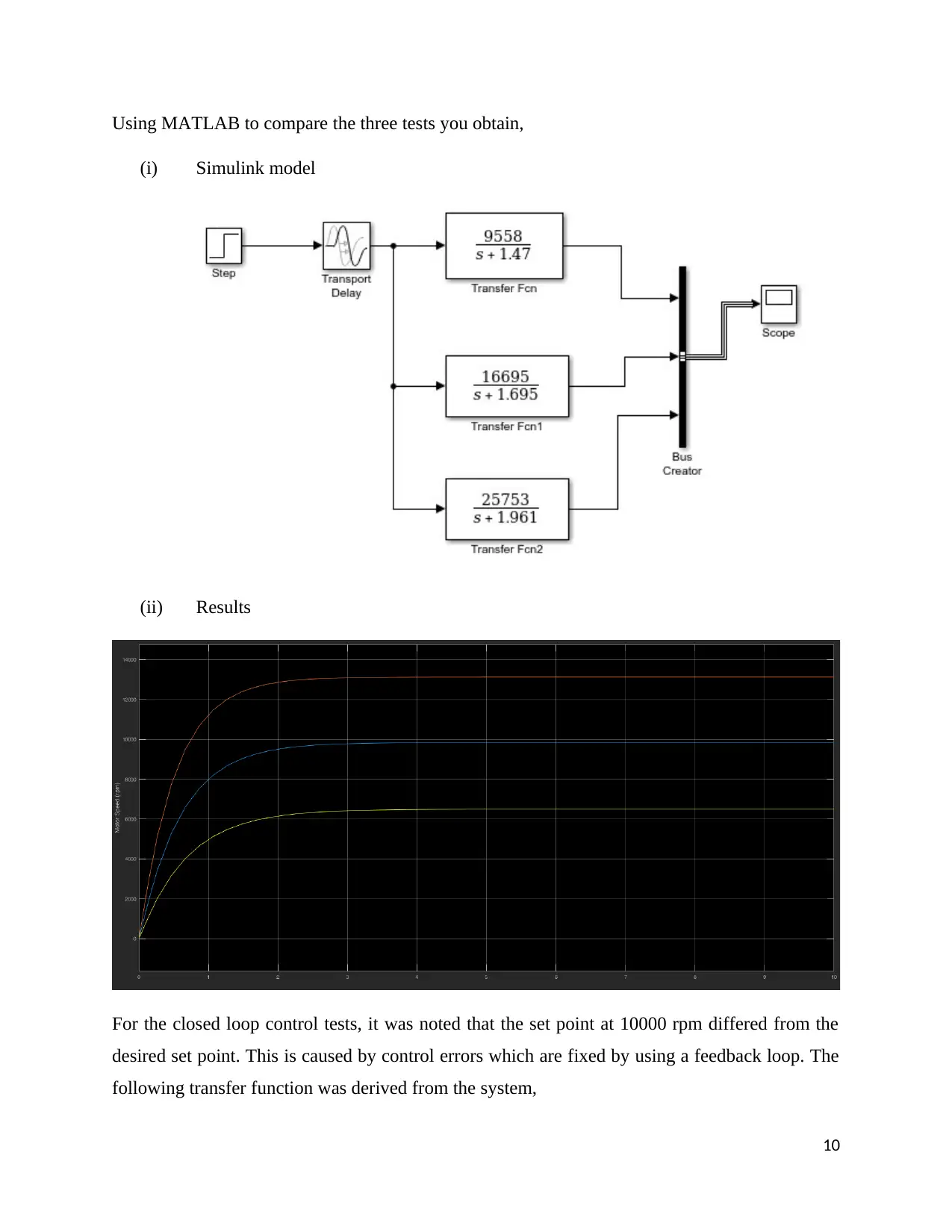
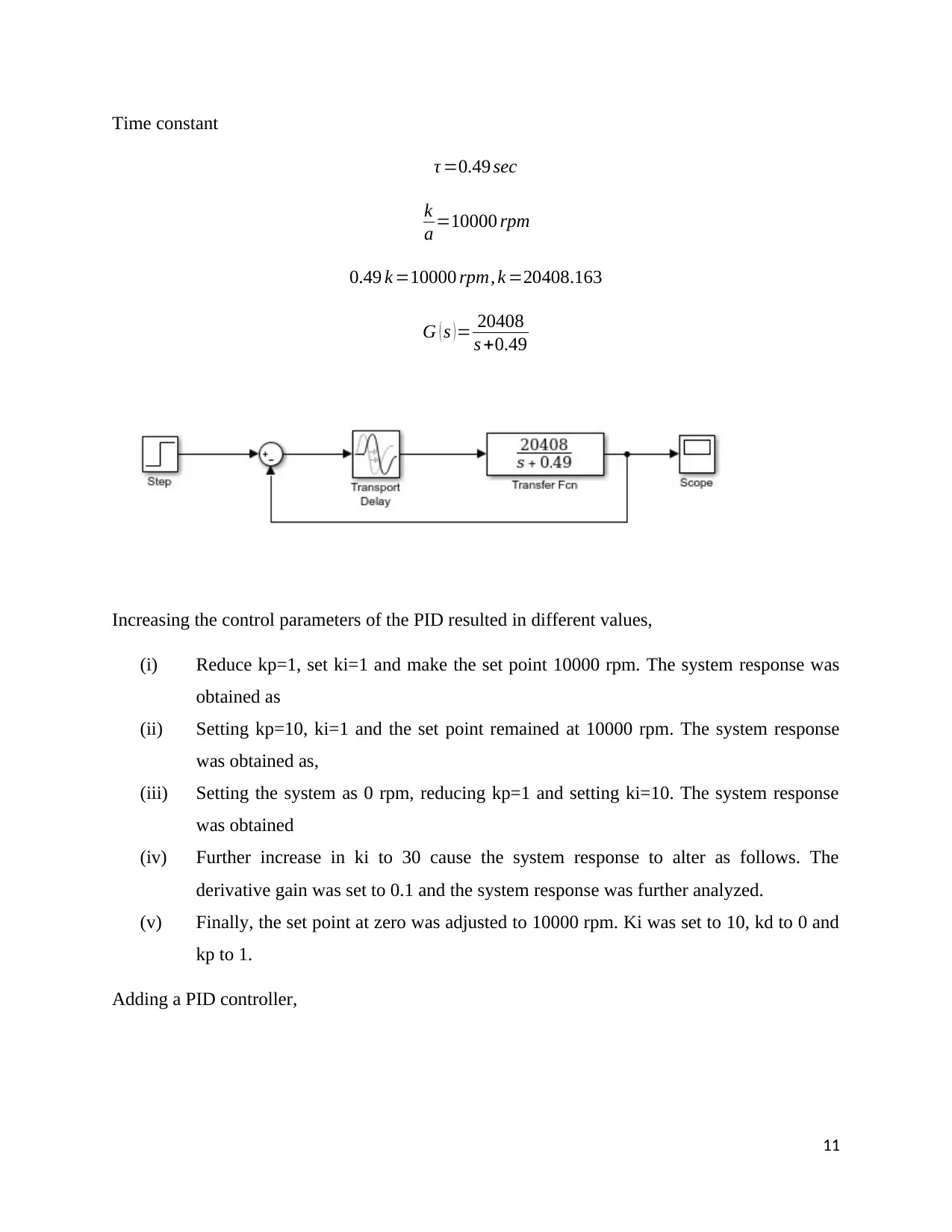
This report investigates the open loop and closed loop speed control of a small DC motor using an Arduino microcontroller and LabVIEW. It details the theory behind open and closed loop control systems, highlighting the advantages and disadvantages of each. The report includes experimental results from a motor rig connected to a 14V DC power supply, with data collected using LabVIEW. Matlab Simulink is used to simulate and verify the system's behavior under ideal conditions, as well as to analyze its response to disturbances and delays. The study also explores PID control and tuning methods, such as the Nichols-Ziegler method, to optimize the closed loop system's performance. The results from both open and closed loop tests are presented and analyzed, including transfer functions and system responses to varying control parameters.



1 out of 18
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.