The Future of Driverless Cars: Development, Challenges, and Solutions
VerifiedAdded on 2022/12/19
|37
|9439
|49
Report
AI Summary
This report provides a comprehensive overview of the development of driverless cars, tracing their evolution from early concepts to modern autonomous vehicles. It examines the underlying technologies, including sensors, AI algorithms, and control systems, while also addressing the challenges faced by the industry. The report delves into specific issues such as software reliability, adverse weather conditions, ethical considerations, and cybersecurity threats. It further explores potential solutions like the RSS model and cognitive control systems. The report concludes by discussing the future of autonomous cars, considering their potential impact on society and transportation.

DEVELOPMENT OF DRIVERLESS CARS IN FUTURE 1
Development of Driverless Cars in Future
By student name
Unit title
Lecture, professor
Institution affiliation
Department
September 6, 2019
Development of Driverless Cars in Future
By student name
Unit title
Lecture, professor
Institution affiliation
Department
September 6, 2019
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
DEVELOPMENT OF DRIVERLESS CARS IN FUTURE 2
Abstract
The primary focus of autonomous driving research is to improve driving accuracy. While great
progress has been made, state-of-the-art algorithms still fail at times. Such failures may have
catastrophic consequences. It, therefore, is important that automated cars foresee problems ahead
as early as possible. This is also of paramount importance if the driver will be asked to take over.
We conjecture that failures do not occur randomly. For instance, driving models may fail more
likely at places with heavy traffic, at complex intersections, and/or under adverse
weather/illumination conditions. This paper presents research Development of Driverless Cars in
Future with their failures and remedies.
The field of autonomous automation is of interest to researchers, and much has been
accomplished in this area, of which this paper presents a detailed chronology. This paper can
help one understand the trends in autonomous vehicle technology for the past, present, and
future. We see a drastic change in autonomous vehicle technology since the 1920s when the first
radio-controlled vehicles were designed. In the subsequent decades, we see fairly autonomous
electric cars powered by embedded circuits in the roads. By 1960s, autonomous cars having
similar electronic guide systems came into the picture. The 1980s saw vision-guided autonomous
vehicles, which was a major milestone in technology and till date we use similar or modified
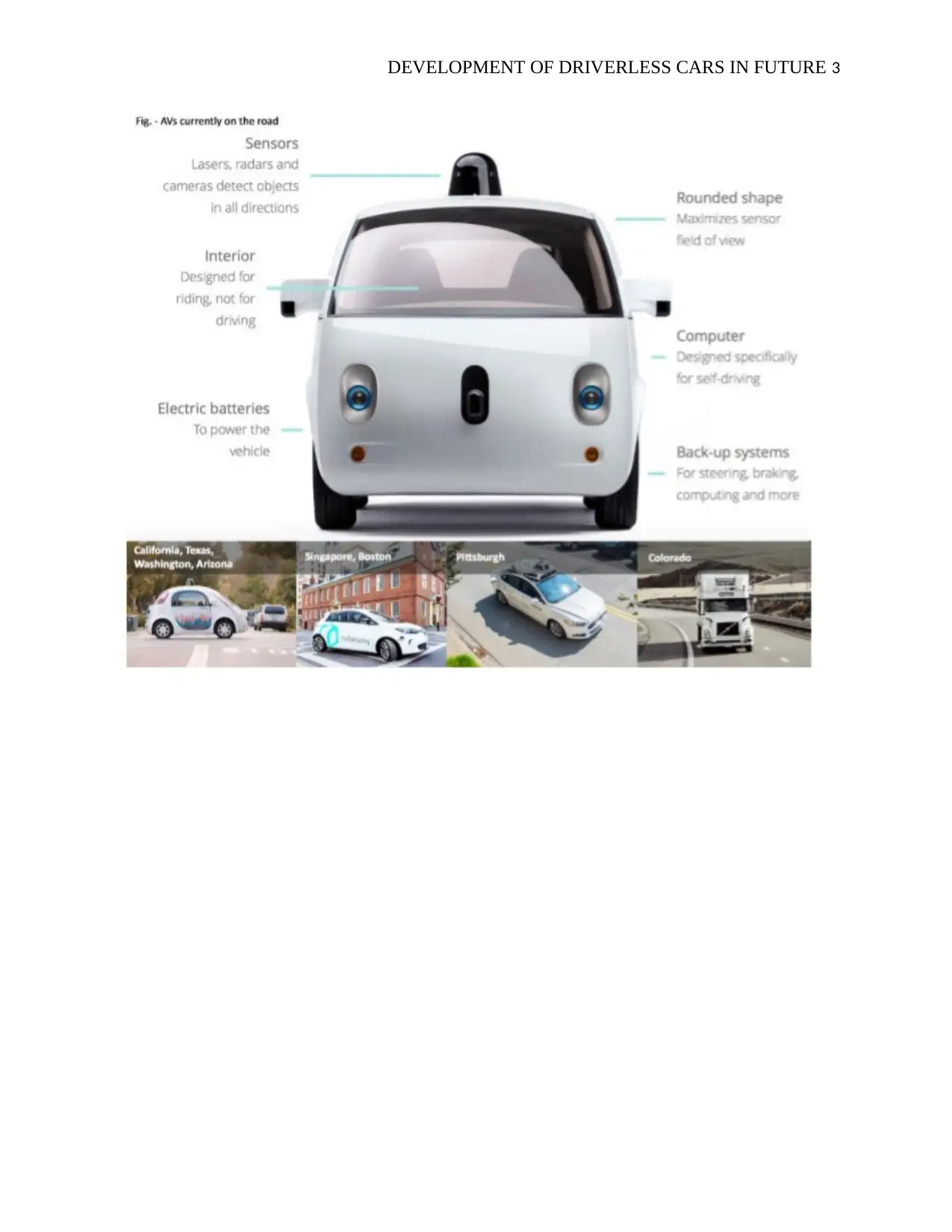
forms of vision and radio-guided technologies. below is an illustration of an autonomous car on
the road
Abstract
The primary focus of autonomous driving research is to improve driving accuracy. While great
progress has been made, state-of-the-art algorithms still fail at times. Such failures may have
catastrophic consequences. It, therefore, is important that automated cars foresee problems ahead
as early as possible. This is also of paramount importance if the driver will be asked to take over.
We conjecture that failures do not occur randomly. For instance, driving models may fail more
likely at places with heavy traffic, at complex intersections, and/or under adverse
weather/illumination conditions. This paper presents research Development of Driverless Cars in
Future with their failures and remedies.
The field of autonomous automation is of interest to researchers, and much has been
accomplished in this area, of which this paper presents a detailed chronology. This paper can
help one understand the trends in autonomous vehicle technology for the past, present, and
future. We see a drastic change in autonomous vehicle technology since the 1920s when the first
radio-controlled vehicles were designed. In the subsequent decades, we see fairly autonomous
electric cars powered by embedded circuits in the roads. By 1960s, autonomous cars having
similar electronic guide systems came into the picture. The 1980s saw vision-guided autonomous
vehicles, which was a major milestone in technology and till date we use similar or modified
forms of vision and radio-guided technologies. below is an illustration of an autonomous car on
the road
DEVELOPMENT OF DRIVERLESS CARS IN FUTURE 3
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
DEVELOPMENT OF DRIVERLESS CARS IN FUTURE 4
Table of Contents
Abstract......................................................................................................................................................2
Introduction...............................................................................................................................................5
Research background............................................................................................................................7
Aims and objectives...............................................................................................................................8
Research methodology..........................................................................................................................9
Preliminary research development......................................................................................................9
Summery................................................................................................................................................9
Literature review.....................................................................................................................................11
Evolution of the autonomous cars......................................................................................................11
Background information.....................................................................................................................13
Driverless car throttle control.........................................................................................................13
Forbes report on why autonomous cars are potentially failing........................................................15
Existence of too many corners........................................................................................................15
The technology is not robust enough..............................................................................................15
The expensive cost...........................................................................................................................15
Incompatibility with the human drivers........................................................................................16
Regulatory and liability hurdles that are deemed to lengthen the technology............................16
Cybersecurity...................................................................................................................................16
Economic devastation......................................................................................................................16
Discussion.................................................................................................................................................18
Challenges facing the driverless cars which call for attention..........................................................18
Software issues.................................................................................................................................18
Bad weather.....................................................................................................................................19
Digital mapping...............................................................................................................................19
Better sensors...................................................................................................................................20
Ethical issues....................................................................................................................................20
Reckless drivers/ unpredictable humans........................................................................................21
Creation of a political as well as a legal minefield.........................................................................22
Safety challenge...............................................................................................................................22
Possible solutions to the challenges faced by autonomous cars........................................................23
RSS model........................................................................................................................................23
Table of Contents
Abstract......................................................................................................................................................2
Introduction...............................................................................................................................................5
Research background............................................................................................................................7
Aims and objectives...............................................................................................................................8
Research methodology..........................................................................................................................9
Preliminary research development......................................................................................................9
Summery................................................................................................................................................9
Literature review.....................................................................................................................................11
Evolution of the autonomous cars......................................................................................................11
Background information.....................................................................................................................13
Driverless car throttle control.........................................................................................................13
Forbes report on why autonomous cars are potentially failing........................................................15
Existence of too many corners........................................................................................................15
The technology is not robust enough..............................................................................................15
The expensive cost...........................................................................................................................15
Incompatibility with the human drivers........................................................................................16
Regulatory and liability hurdles that are deemed to lengthen the technology............................16
Cybersecurity...................................................................................................................................16
Economic devastation......................................................................................................................16
Discussion.................................................................................................................................................18
Challenges facing the driverless cars which call for attention..........................................................18
Software issues.................................................................................................................................18
Bad weather.....................................................................................................................................19
Digital mapping...............................................................................................................................19
Better sensors...................................................................................................................................20
Ethical issues....................................................................................................................................20
Reckless drivers/ unpredictable humans........................................................................................21
Creation of a political as well as a legal minefield.........................................................................22
Safety challenge...............................................................................................................................22
Possible solutions to the challenges faced by autonomous cars........................................................23
RSS model........................................................................................................................................23
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
DEVELOPMENT OF DRIVERLESS CARS IN FUTURE 5
Deployment of a cognitive system for control................................................................................24
Solving the cybersecurity issues......................................................................................................25
Mapping...........................................................................................................................................26
Addressing the challenge of bad weather.......................................................................................29
Addressing the software issues.......................................................................................................30
Addressing the ethical concerns.....................................................................................................30
Addressing the reckless drivers......................................................................................................31
The future of autonomous cars...........................................................................................................31
Conclusion................................................................................................................................................31
Bibliography............................................................................................................................................33
Deployment of a cognitive system for control................................................................................24
Solving the cybersecurity issues......................................................................................................25
Mapping...........................................................................................................................................26
Addressing the challenge of bad weather.......................................................................................29
Addressing the software issues.......................................................................................................30
Addressing the ethical concerns.....................................................................................................30
Addressing the reckless drivers......................................................................................................31
The future of autonomous cars...........................................................................................................31
Conclusion................................................................................................................................................31
Bibliography............................................................................................................................................33
DEVELOPMENT OF DRIVERLESS CARS IN FUTURE 6
Introduction
The future is ultimately unknowable, but planning requires predictions of impending conditions
and needs (Shaheen, Totte and Stocker 2018). Many decision-makers and practitioners (planners,
engineers, and analysts) wonder how autonomous (also called self-driving or robotic) vehicles
will affect travel and land use development patterns; a road, parking, and public transit demands;
traffic problems; and whether public policies should encourage or restrict their use (Althoff,
2010). There is considerable uncertainty about these issues. Optimists predict that by 2030,
autonomous vehicles will be sufficiently reliable and affordable to replace most human driving,
providing independent mobility to non-drivers, reducing driver stress and tedium, and be a
panacea for congestion, accident, and pollution problems (Johnston and Walker 2017; Keeney
2017; Kok, et al. 2017).
However, there are good reasons to be skeptical of such claims.Most optimistic predictions are
based on experience with electronic innovations such as digital cameras, smartphones, and the
Internet. Their analysis often overlooks significant obstacles and costs. Although vehicles can
now operate autonomously under certain conditions, many technical problems must be solved
before they can operate autonomously in all conditions – including extreme weather, unpaved
roads and during wireless service disruptions – and those vehicles must be tested, approved for
general commercial sale, affordable to most travelers, and attractive to consumers. Motor
vehicles last much longer and cost much more than personal computers, cameras or telephones,
so new technologies generally require many years to penetrate vehicle fleets.
A camera, telephone or Internet failure can be frustrating but is seldom fatal; motor vehicles
system failures can be frustrating and deadly to occupants and other road users. Autonomous
driving can induce additional vehicle travel which can increase traffic problems. As a result,
Introduction
The future is ultimately unknowable, but planning requires predictions of impending conditions
and needs (Shaheen, Totte and Stocker 2018). Many decision-makers and practitioners (planners,
engineers, and analysts) wonder how autonomous (also called self-driving or robotic) vehicles
will affect travel and land use development patterns; a road, parking, and public transit demands;
traffic problems; and whether public policies should encourage or restrict their use (Althoff,
2010). There is considerable uncertainty about these issues. Optimists predict that by 2030,
autonomous vehicles will be sufficiently reliable and affordable to replace most human driving,
providing independent mobility to non-drivers, reducing driver stress and tedium, and be a
panacea for congestion, accident, and pollution problems (Johnston and Walker 2017; Keeney
2017; Kok, et al. 2017).
However, there are good reasons to be skeptical of such claims.Most optimistic predictions are
based on experience with electronic innovations such as digital cameras, smartphones, and the
Internet. Their analysis often overlooks significant obstacles and costs. Although vehicles can
now operate autonomously under certain conditions, many technical problems must be solved
before they can operate autonomously in all conditions – including extreme weather, unpaved
roads and during wireless service disruptions – and those vehicles must be tested, approved for
general commercial sale, affordable to most travelers, and attractive to consumers. Motor
vehicles last much longer and cost much more than personal computers, cameras or telephones,
so new technologies generally require many years to penetrate vehicle fleets.
A camera, telephone or Internet failure can be frustrating but is seldom fatal; motor vehicles
system failures can be frustrating and deadly to occupants and other road users. Autonomous
driving can induce additional vehicle travel which can increase traffic problems. As a result,
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
DEVELOPMENT OF DRIVERLESS CARS IN FUTURE 7
autonomous vehicles will probably take longer to develop and provide smaller net benefits than
optimists predict (Brodsky, 2016).
These factors have significant transport policy and planning implications (Papa and Ferreira
2018; Speck ). Vehicles rely on public infrastructure and impose external costs, and so require
more public planning and investment than most other technologies. For example, autonomous
vehicles can be programmed based on user preferences (maximizing traffic speeds and occupant
safety) or community goals (limiting speeds and protecting other road users), and many predicted
autonomous vehicle benefits, including congestion and pollution reductions, require dedicated
lanes to allow platooning (numerous vehicles driving close together at relatively high speeds).
Policymakers must decide how to regulate and price autonomous driving, and when potential
benefits justify dedicating traffic lanes to their exclusive use.
Self-driving vehicles combine sensors such as radar, lidar, sonar, GPS and odometry
measurements with inertial units to perceive the environment. Advanced control systems perform
the sensing of data to define suitable routes and barriers and signage. The auto controls in the
vehicle are supported by various technologies. These include the car navigation, positioning
systems, electronic maps, mapping compatibility, worldwide trajectory planning, environmental
perception, laser vision, visual perception, control of the vehicle, the perception of the vehicle
velocity and direction, the process of control of the vehicle, etc., which needs enhancement at
present (Brown, 2017). The figure two below illustrates various levels of automation
autonomous vehicles will probably take longer to develop and provide smaller net benefits than
optimists predict (Brodsky, 2016).
These factors have significant transport policy and planning implications (Papa and Ferreira
2018; Speck ). Vehicles rely on public infrastructure and impose external costs, and so require
more public planning and investment than most other technologies. For example, autonomous
vehicles can be programmed based on user preferences (maximizing traffic speeds and occupant
safety) or community goals (limiting speeds and protecting other road users), and many predicted
autonomous vehicle benefits, including congestion and pollution reductions, require dedicated
lanes to allow platooning (numerous vehicles driving close together at relatively high speeds).
Policymakers must decide how to regulate and price autonomous driving, and when potential
benefits justify dedicating traffic lanes to their exclusive use.
Self-driving vehicles combine sensors such as radar, lidar, sonar, GPS and odometry
measurements with inertial units to perceive the environment. Advanced control systems perform
the sensing of data to define suitable routes and barriers and signage. The auto controls in the
vehicle are supported by various technologies. These include the car navigation, positioning
systems, electronic maps, mapping compatibility, worldwide trajectory planning, environmental
perception, laser vision, visual perception, control of the vehicle, the perception of the vehicle
velocity and direction, the process of control of the vehicle, etc., which needs enhancement at
present (Brown, 2017). The figure two below illustrates various levels of automation
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser

DEVELOPMENT OF DRIVERLESS CARS IN FUTURE 8
Figure 1 interface of a driverless car ("Driverless cars will make you sick – but there's a fix",
2019)
Research background
The automobile elicits a wide range of feelings: the pleasure of driving may include the
experience of power, freedom, autonomy, independence, speed—and virility.1 In daily road
congestion, however, the pursuit of individual mobility often turns into collective immobility.
Figure 1 interface of a driverless car ("Driverless cars will make you sick – but there's a fix",
2019)
Research background
The automobile elicits a wide range of feelings: the pleasure of driving may include the
experience of power, freedom, autonomy, independence, speed—and virility.1 In daily road
congestion, however, the pursuit of individual mobility often turns into collective immobility.
DEVELOPMENT OF DRIVERLESS CARS IN FUTURE 9
The___14 problem of tramcars, accidents, and the environmental costs of individualized mass
mobility have become a major hindrance to the promise of automobility.
Over the past twenty years, advanced driver assistance systems have been developed that renew
the promise of the automobile. Most of them have become standard features in contemporary car
models. Nowadays, however, researchers at high-tech companies, in the automotive industry and
academia, are pursuing an even more ambitious goal: fully autonomous driving. Existing
concepts of the driverless car that may or may not hit the road in a few years' time di erff
considerably. Something they all have in common, however, is that the promise of safer and
more efficient self-driving cars—a promise made by the manufacturers and echoed in journalistic
and popular culture discourse—rekindles the old familiar logic of a “technological fix”:
technology is understood mainly as a tool to shape the society in a one-directional way rather
than as the embodiment of social relations and the common product of human and nonhuman
practices and actors.
Accordingly, the dominant discourse seeks to solve the problems of contemporary road
transportation systems in a top-down and instrumental way, leaving unaddressed key social and
cultural issues of post-Fordist mobility (Chakraborty & Datta, 2018).
Aims and objectives
The primary aim of the paper is to develop a research-based on driverless cars. In order to
understand the development of research in autonomous driving in the last years, it
is important to conduct to understand the different fields of application
through which autonomous driving has evolved as well as to identify research gaps.
Therefore the main aim in the research process, methodology, and findings of the
literature review are presented.
The___14 problem of tramcars, accidents, and the environmental costs of individualized mass
mobility have become a major hindrance to the promise of automobility.
Over the past twenty years, advanced driver assistance systems have been developed that renew
the promise of the automobile. Most of them have become standard features in contemporary car
models. Nowadays, however, researchers at high-tech companies, in the automotive industry and
academia, are pursuing an even more ambitious goal: fully autonomous driving. Existing
concepts of the driverless car that may or may not hit the road in a few years' time di erff
considerably. Something they all have in common, however, is that the promise of safer and
more efficient self-driving cars—a promise made by the manufacturers and echoed in journalistic
and popular culture discourse—rekindles the old familiar logic of a “technological fix”:
technology is understood mainly as a tool to shape the society in a one-directional way rather
than as the embodiment of social relations and the common product of human and nonhuman
practices and actors.
Accordingly, the dominant discourse seeks to solve the problems of contemporary road
transportation systems in a top-down and instrumental way, leaving unaddressed key social and
cultural issues of post-Fordist mobility (Chakraborty & Datta, 2018).
Aims and objectives
The primary aim of the paper is to develop a research-based on driverless cars. In order to
understand the development of research in autonomous driving in the last years, it
is important to conduct to understand the different fields of application
through which autonomous driving has evolved as well as to identify research gaps.
Therefore the main aim in the research process, methodology, and findings of the
literature review are presented.
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
DEVELOPMENT OF DRIVERLESS CARS IN FUTURE 10
The specific objectives in the project will help in achieving the research goals. These objectives
areas listed below.
a. Established the evolution of driverless cars
b. Identify problems and challenges faced in driverless car technology
c. Provide solution for the problems in an above
d. Established the future and possible future technology for autonomous cars
Research methodology
Therefore, taking into consideration only the literature publications relevant to roads, traffic,
crossroads and studies related to commuting, transportation or production, and including all
relevant publications found related to the automotive industry, as well as also considering
papers in other topics that acknowledge that the application could be relevant for self-driving
cars.
Preliminary research development
In order to understand the development of research in autonomous driving in the last years, it
is important to conduct a literature review to understand the different fields of application
through which autonomous driving has evolved as well as to identify research gaps.Therefore in
the next sections the research process, methodology, and findings of the
literature review are presented.
Summery
The primary focus of autonomous driving research is to improve driving accuracy. While great
progress has been made, state-of-the-art algorithms still fail at times. Such failures may have
catastrophic consequences. The primary aim of the paper is to develop a research-based on
driverless cars. In order to understand the development of research in autonomous driving in the
The specific objectives in the project will help in achieving the research goals. These objectives
areas listed below.
a. Established the evolution of driverless cars
b. Identify problems and challenges faced in driverless car technology
c. Provide solution for the problems in an above
d. Established the future and possible future technology for autonomous cars
Research methodology
Therefore, taking into consideration only the literature publications relevant to roads, traffic,
crossroads and studies related to commuting, transportation or production, and including all
relevant publications found related to the automotive industry, as well as also considering
papers in other topics that acknowledge that the application could be relevant for self-driving
cars.
Preliminary research development
In order to understand the development of research in autonomous driving in the last years, it
is important to conduct a literature review to understand the different fields of application
through which autonomous driving has evolved as well as to identify research gaps.Therefore in
the next sections the research process, methodology, and findings of the
literature review are presented.
Summery
The primary focus of autonomous driving research is to improve driving accuracy. While great
progress has been made, state-of-the-art algorithms still fail at times. Such failures may have
catastrophic consequences. The primary aim of the paper is to develop a research-based on
driverless cars. In order to understand the development of research in autonomous driving in the
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
DEVELOPMENT OF DRIVERLESS CARS IN FUTURE 11
last years, it is important to conduct to understand the different fields of application
through which autonomous driving has evolved as well as to identify research gaps.Therefore the
main aim in the research process, methodology, and findings of the
literature review is presented.
last years, it is important to conduct to understand the different fields of application
through which autonomous driving has evolved as well as to identify research gaps.Therefore the
main aim in the research process, methodology, and findings of the
literature review is presented.
DEVELOPMENT OF DRIVERLESS CARS IN FUTURE 12
Literature review
Evolution of the autonomous cars
The history of self-driving cars is related to various individuals who made significant
contributions from simple structures to the present idea of autonomous vehicles. The evolution of
the autonomous cars is dated back in c. 1500 where it all began by da Vinci who built a self-
propelled cart (Dreves & Gerdts, 2018). The car operated on high tensioned springs whose
steering was pre-set, such that the cart would move in a certain designated path. To some extent,
it became to be regarded as the first world robot. Later, in the times of the world wars, whitehead
torpedo constructed a torpedo weapon which could automatically propel itself underwater over
long distances, via a pressurized methodology. This technology contributed greatly to a variety
of autonomous devices.
An aircraft with autopilot was then developed in 1933 by mike, which was used for longer-range
aircraft. It depended on the gyroscopes to track its path, and the latter is still of significance till
date (Colonna, 2012). In the year 1945, Teeter developed a cruised control system for smooth
steering using a mechanical throttle. 1961 saw the development of the first autonomous vehicle
when the idea to design a lunar rover which would navigate independently on the moon was
proposed by a Stanford engineering graduate. The car was built on a number of sensors and
cameras to detect various changes and signals.
In 1977, based on an improved version of the autonomous car, Japan-based tsukubai developed
an autonomous car which had the ability to recognize the street markings while moving at a
speed of 20 miles every hour by the help of two mounted cameras. The idea was further
improved by Ernest Dickmass who enhanced the car further with a variety of sensors which
could detect various potential hazards as well as their locations. In 2015, tesla developed a
Literature review
Evolution of the autonomous cars
The history of self-driving cars is related to various individuals who made significant
contributions from simple structures to the present idea of autonomous vehicles. The evolution of
the autonomous cars is dated back in c. 1500 where it all began by da Vinci who built a self-
propelled cart (Dreves & Gerdts, 2018). The car operated on high tensioned springs whose
steering was pre-set, such that the cart would move in a certain designated path. To some extent,
it became to be regarded as the first world robot. Later, in the times of the world wars, whitehead
torpedo constructed a torpedo weapon which could automatically propel itself underwater over
long distances, via a pressurized methodology. This technology contributed greatly to a variety
of autonomous devices.
An aircraft with autopilot was then developed in 1933 by mike, which was used for longer-range
aircraft. It depended on the gyroscopes to track its path, and the latter is still of significance till
date (Colonna, 2012). In the year 1945, Teeter developed a cruised control system for smooth
steering using a mechanical throttle. 1961 saw the development of the first autonomous vehicle
when the idea to design a lunar rover which would navigate independently on the moon was
proposed by a Stanford engineering graduate. The car was built on a number of sensors and
cameras to detect various changes and signals.
In 1977, based on an improved version of the autonomous car, Japan-based tsukubai developed
an autonomous car which had the ability to recognize the street markings while moving at a
speed of 20 miles every hour by the help of two mounted cameras. The idea was further
improved by Ernest Dickmass who enhanced the car further with a variety of sensors which
could detect various potential hazards as well as their locations. In 2015, tesla developed a
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
1 out of 37
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
Copyright © 2020–2025 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.