Detailed Analysis of Dynamic System Modeling and Control for Motorbike
VerifiedAdded on 2020/02/18
|11
|1442
|152
Project
AI Summary
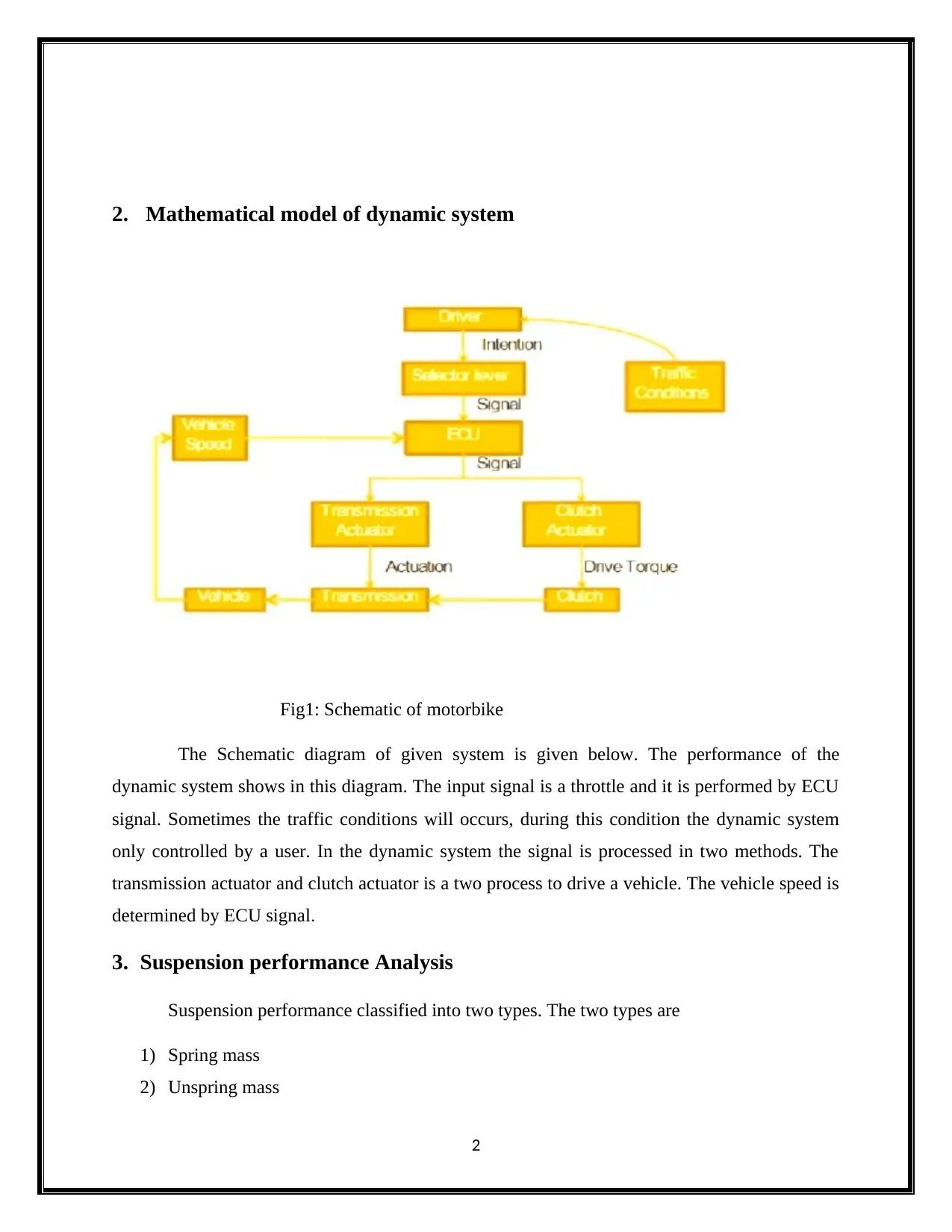
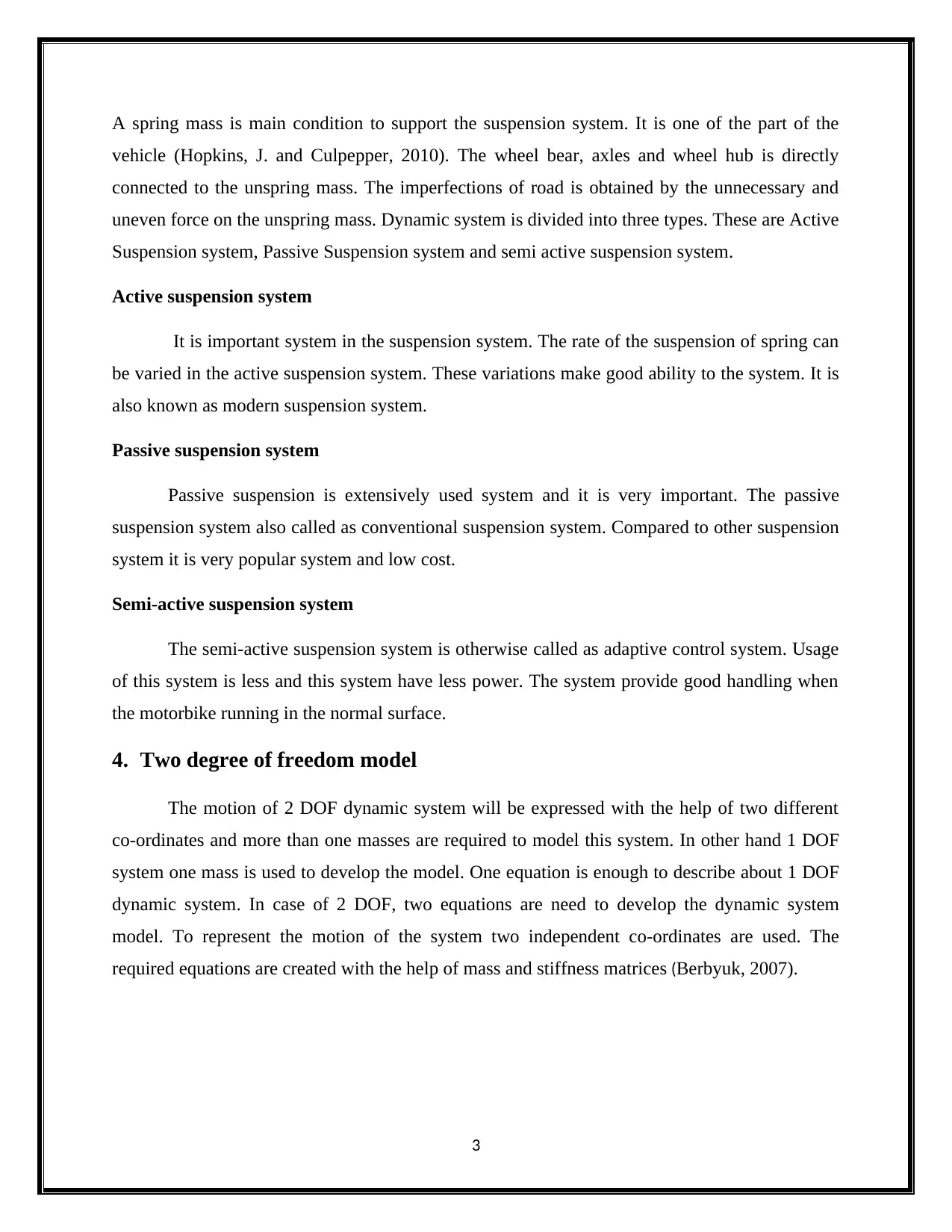
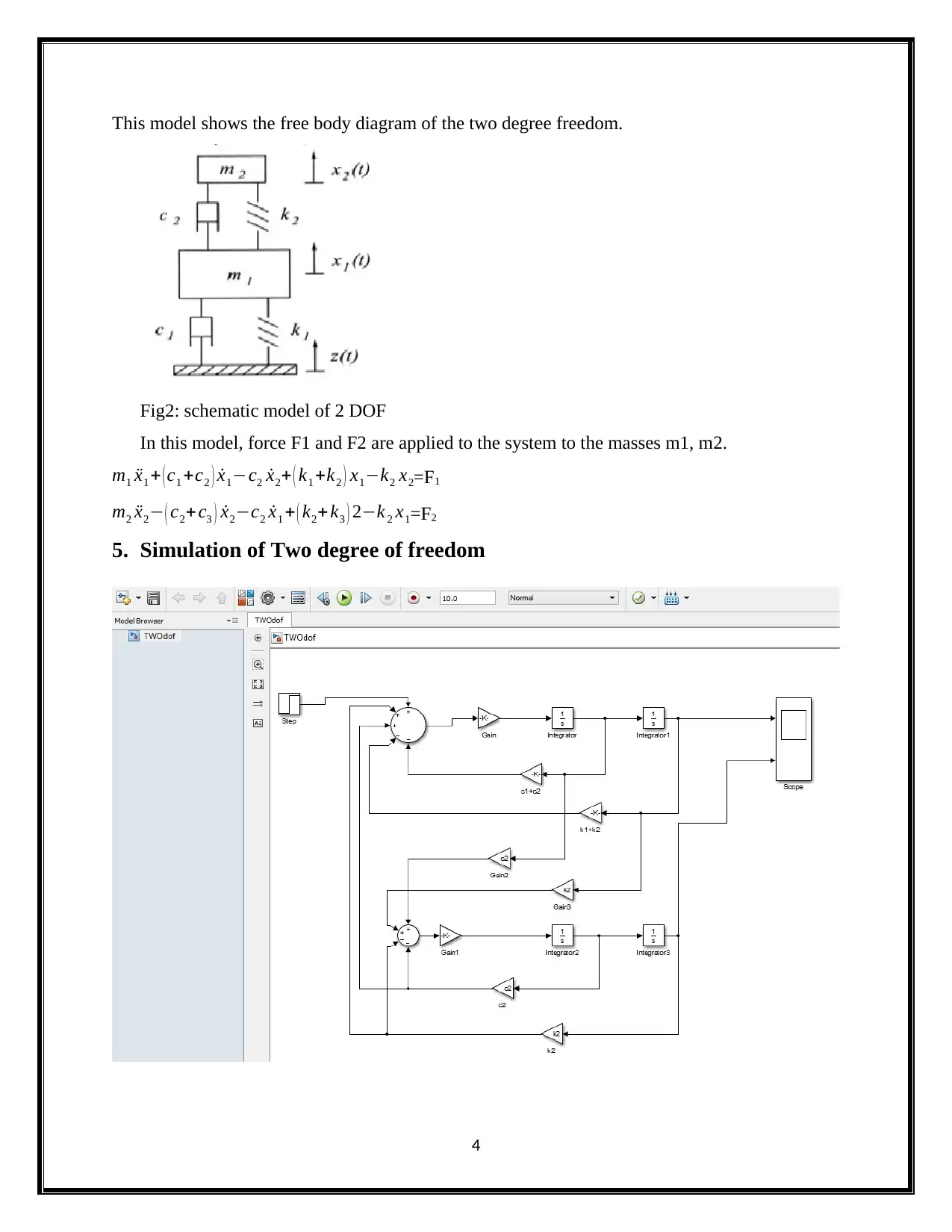
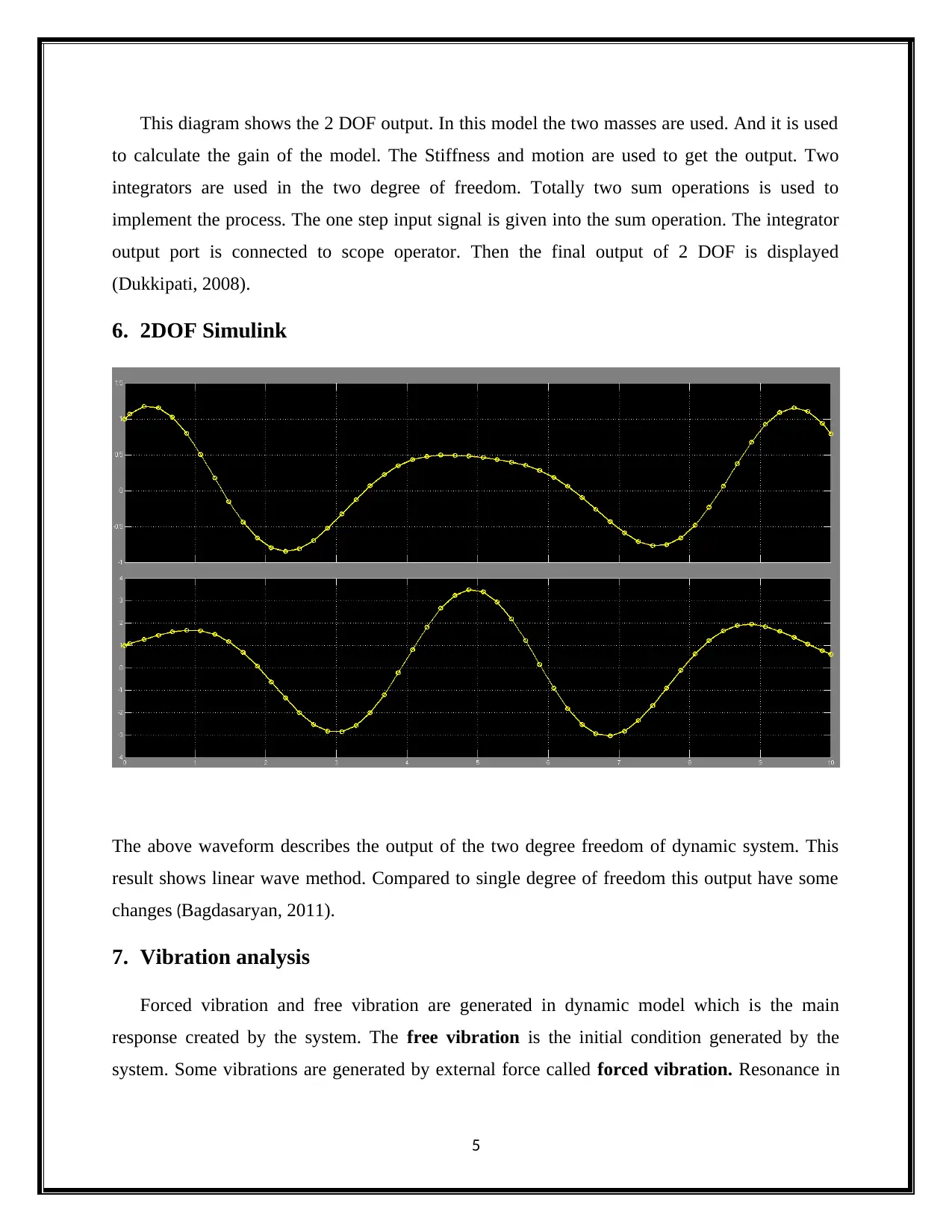
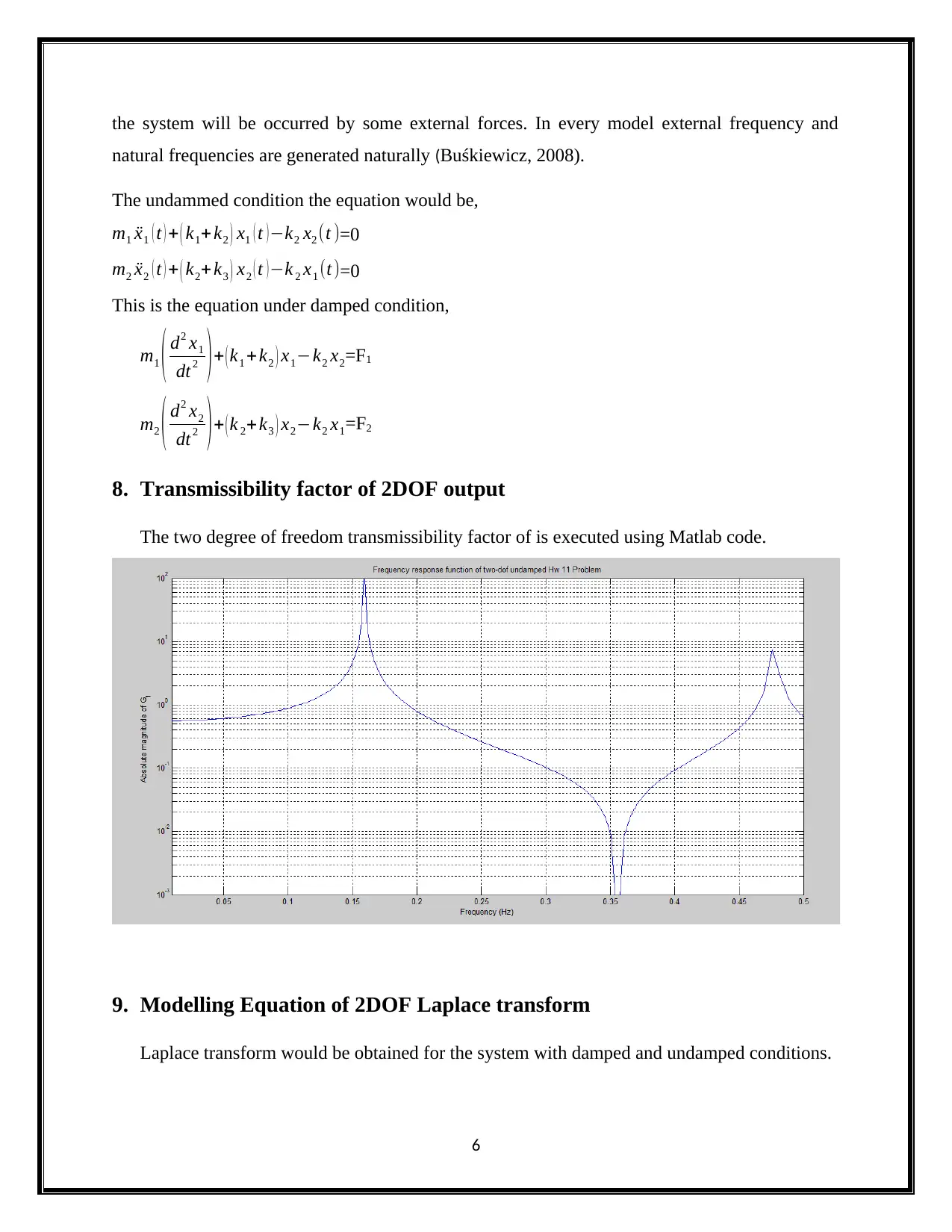
This project focuses on the dynamic system modeling and control of a motorbike, providing a comprehensive analysis of its performance. It begins with an executive summary outlining the importance of modeling in understanding system dynamics, followed by an introduction to the project's goals, which include implementing two-degree-of-freedom (2DOF) techniques and constructing a three-degree-of-freedom system. The project utilizes MATLAB and Simulink for analysis, including Laplace transforms, transfer functions, and transmissibility and magnification factor calculations. The study includes a schematic diagram of the motorbike's dynamic system, analyzes suspension performance (spring mass, unspring mass), and discusses different suspension types (active, passive, and semi-active). The project then delves into the 2DOF model, illustrating its equations and simulation results. The project also covers vibration analysis, including forced and free vibrations, and the transmissibility factor. Finally, the project compares 1DOF and 2DOF systems, and concludes with a summary of the findings, referencing various sources. The project is aimed at providing a detailed understanding of dynamic system modelling and control in the context of a motorbike.

1 out of 11
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.