Efficient and Robust Driver Assistance System Project Proposal
VerifiedAdded on 2023/06/13
|11
|3457
|470
Project
AI Summary
This project proposal outlines the development of an efficient and robust Advanced Driver Assistance System (ADAS) aimed at improving road safety. The proposal identifies the limitations of current ADAS technologies, such as traffic sign recognition and drowsiness detection systems, which suffer from issues like poor performance under varying environmental conditions, camera viewpoint changes, and slow processing speeds. The project aims to address these challenges by utilizing distributed representation learning techniques to create a system that is more robust, efficient, and applicable in real-world scenarios. The methodology involves data collection, dataset processing, data augmentation, and the definition of a Convolutional Neural Network (CNN) model. The experimental setup will utilize tools like Torch, Theano, Caffe, Tensorflow, and MATLAB, and the performance will be evaluated using standard metrics like recall, precision, F1-score, and accuracy. The project plan includes a detailed Gantt chart outlining the various activities and timelines for completion.

[Please fill your name]
Efficient and Robust Driver Assistance System
By ‘[Please fill your name]
Affiliation (MSc Profile or Track) & Study no.
Efficient and Robust Driver Assistance System
By ‘[Please fill your name]
Affiliation (MSc Profile or Track) & Study no.
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
[Please fill your name]
Table of Contents
Efficient and Robust Driver Assistance System...............................................................................1
1. Executive Summary..................................................................................................................3
2. Introduction..............................................................................................................................3
3. State-of-the-art/Literature Review............................................................................................3
4. Research Question, Aim/Objectives and Sub-goals.................................................................4
Research questions...................................................................................................................4
Goals.........................................................................................................................................5
5. Theoretical Content/Methodology............................................................................................5
6. Experimental Setting (Hardware or Software or Both)............................................................6
7. Risk Analysis, Results, Outcome and Relevance.....................................................................7
8. Project Planning and Gantt Chart.............................................................................................7
List of Activities:......................................................................................................................7
Gantt Chart...............................................................................................................................9
9. Conclusions............................................................................................................................10
10. References...........................................................................................................................11
Table of Contents
Efficient and Robust Driver Assistance System...............................................................................1
1. Executive Summary..................................................................................................................3
2. Introduction..............................................................................................................................3
3. State-of-the-art/Literature Review............................................................................................3
4. Research Question, Aim/Objectives and Sub-goals.................................................................4
Research questions...................................................................................................................4
Goals.........................................................................................................................................5
5. Theoretical Content/Methodology............................................................................................5
6. Experimental Setting (Hardware or Software or Both)............................................................6
7. Risk Analysis, Results, Outcome and Relevance.....................................................................7
8. Project Planning and Gantt Chart.............................................................................................7
List of Activities:......................................................................................................................7
Gantt Chart...............................................................................................................................9
9. Conclusions............................................................................................................................10
10. References...........................................................................................................................11
[Please fill your name]
1. Executive Summary
In Automobile Industry, ADAS (Advance Driver Assistance Systems) has been becoming its
integral part because of the advancement in the interest of the consumers and the government
regulations in the aspects related to the safety of the road. There are many beneficial aspects of
the ADAS that includes monitoring the outer environment, generating warnings for the instances
of danger, providing information related to the traffic signals and allowing them to be ahead of
the time. Other benefits are applying brakes for the scenarios where there is the possibility of the
collisions, monitoring the behavior of the drivers while driving including aggressiveness, panic,
sleepy, and many more. There are many drawbacks in the ADAS system resulting in the
decrement of the efficiency and robustness of the system that includes fading of the traffic
signals, change in the view point of the camera, natural conditions, and image blurring. The aim
of this project is to mitigate these challenges through utilizing the “distributed representation
learning techniques” those can be utilized in making the system much efficient, robust, and
applicable in the real world scenarios.
The methodology proposed in this report is capable of improving the ADAS technologies in
manner to make the system much efficient, robust and thus, enhance the performance of the
technology. The scope of the project is to enhance the safety of the drivers on the road focusing
on the long-term administration and road safety for many of the automobile majors, humanity,
and policy makers.
2. Introduction
Artificial Intelligence (AI) has been contributing in the development of the life living of the
individuals through facilitating the automation in the real life and many applications of the AI in
the real world. More or less AI can be applicable in most of the sectors in the real world and so is
in the automobile sector that has been advanced with the technology and resulted in many
beneficial advancement. Most of the accident cases at the roads occur because of the negligence
of the drivers and ADAS is capable of predicting the scenarios and presenting solution for
eliminating these challenges through the real-time data collection and execution. Many
automated cars have been utilizing the LiDAR (Light Detection and Ranging), RADAR (Radio
Detection and Ranging), and IR (infrared) sensors, cameras, and Ultrasonic cameras. However,
the performance of the ADAS technology has not been much reliable until the date and this
report aims at highlighting o that perspective and proposing solutions those could be utilized for
eliminating the problems. It can be stated that the automobile industry’s les in the option of
presenting driverless cars with zero error and 100% efficiency. The objective of this project is to
eliminate the identified issues and propose effective solutions those could be applied for the
enhancement in the performance of the ADAS technology and make it more robust, efficient, and
accurate.
3. State-of-the-art/Literature Review
ADSAS can be represented as encapsulation of various systems comprised of IoT (Internet of
Things) and V2V (vehicle-to-vehicle) wireless communication systems, vision camera systems,
and sensor technologies (kale and Mahajan 2015). The ADAS system comprised of very vast
1. Executive Summary
In Automobile Industry, ADAS (Advance Driver Assistance Systems) has been becoming its
integral part because of the advancement in the interest of the consumers and the government
regulations in the aspects related to the safety of the road. There are many beneficial aspects of
the ADAS that includes monitoring the outer environment, generating warnings for the instances
of danger, providing information related to the traffic signals and allowing them to be ahead of
the time. Other benefits are applying brakes for the scenarios where there is the possibility of the
collisions, monitoring the behavior of the drivers while driving including aggressiveness, panic,
sleepy, and many more. There are many drawbacks in the ADAS system resulting in the
decrement of the efficiency and robustness of the system that includes fading of the traffic
signals, change in the view point of the camera, natural conditions, and image blurring. The aim
of this project is to mitigate these challenges through utilizing the “distributed representation
learning techniques” those can be utilized in making the system much efficient, robust, and
applicable in the real world scenarios.
The methodology proposed in this report is capable of improving the ADAS technologies in
manner to make the system much efficient, robust and thus, enhance the performance of the
technology. The scope of the project is to enhance the safety of the drivers on the road focusing
on the long-term administration and road safety for many of the automobile majors, humanity,
and policy makers.
2. Introduction
Artificial Intelligence (AI) has been contributing in the development of the life living of the
individuals through facilitating the automation in the real life and many applications of the AI in
the real world. More or less AI can be applicable in most of the sectors in the real world and so is
in the automobile sector that has been advanced with the technology and resulted in many
beneficial advancement. Most of the accident cases at the roads occur because of the negligence
of the drivers and ADAS is capable of predicting the scenarios and presenting solution for
eliminating these challenges through the real-time data collection and execution. Many
automated cars have been utilizing the LiDAR (Light Detection and Ranging), RADAR (Radio
Detection and Ranging), and IR (infrared) sensors, cameras, and Ultrasonic cameras. However,
the performance of the ADAS technology has not been much reliable until the date and this
report aims at highlighting o that perspective and proposing solutions those could be utilized for
eliminating the problems. It can be stated that the automobile industry’s les in the option of
presenting driverless cars with zero error and 100% efficiency. The objective of this project is to
eliminate the identified issues and propose effective solutions those could be applied for the
enhancement in the performance of the ADAS technology and make it more robust, efficient, and
accurate.
3. State-of-the-art/Literature Review
ADSAS can be represented as encapsulation of various systems comprised of IoT (Internet of
Things) and V2V (vehicle-to-vehicle) wireless communication systems, vision camera systems,
and sensor technologies (kale and Mahajan 2015). The ADAS system comprised of very vast
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide

[Please fill your name]
sections those cannot be covered in a single file and hence, this report emphasizes on two
important visions including the drowsiness alert system and traffic sign recognition system. In
these both the scenarios, the input data is recorded in the form of the image and/ or video and
passed to the processing unit for the real-time data execution (Villalon Torres & Flores 2017).
The processor will be making the computation on the basis of the algorithms embedded within it
and the output decision will be carried out accordingly. Major five stages of the computer vision
pipeline include the “data processing, objects segmentation and detection, feature extraction,
classification and evaluation (Zeng et al. 2015).” The every stage has its different role including
from the collection of data, processing of data and extraction features. The features those have
been extracted will be passing through different classifiers in manner to for the training (Choi,
Song & Lee 2018). “k-Nearest Neighbor, Naïve Bayes, Linear classifier, Decision Trees, Random
Forests, Multi-Layer Perceptron (MLP), Support Vector Machines (SVM), AdaBoost and ensemble
of various classifiers” comprised of the main classifiers within the computer vision research
(Nguyenn, Ryong and Kyu 2014). (Jung et al. 2018) have noticed it that the approaches have
been not very good for the performance of the ADAS technology considering the conventional
computer vision. Previously, the recognition of the traffic sign was delivered through the
traditional conventional computer system however; te current approaches can be delivered for the
identification of the colors, edges, and extraction of the smaller objects (Sun et al. 2015). In manner
to boost up the performance, many attempts were delivered considering the combination of different
classifiers. SVR (Support Vector Regression) and AdaBoost had contributed in the improvement of
the performance however according to Li and Yand (2016); it has been very subjective in manner to
capture and detect many features including the texture, shape, color, spatial location and others and
was limited for the ambient conditions (Gudigar et al. 2017). Experimental results stated how the
natural conditions such as fog, smog, rain, wind and others make the system vulnerable and thus,
affecting the efficiency of the project.
The considerable areas for the delivery of this project is the consideration of the drowsiness alert
system and recognition of the traffic signs as these are the vital factors for the accidents at the roads
(Liu et al. 2016). Many researchers had contributed in the identification of these major concerns and
tried to eliminate the problem for the enhancement in the efficiency of the ADAS technology. Keser,
Kramar and Nozica (2016) proposed the classification based on three different approaches including
the psychological, vehicle, and behavior based approaches in manner to identify the factors affecting
the overall output of the ADAS technology and driverless vehicles.
4. Research Question, Aim/Objectives and Sub-goals
4. a Research questions
The sector of the ADAS covers a vast sector of the technologies those are comprised for this
technology and hence, for this paper, two major visions have been considered as explained
earlier. This paper will be emphasizing on the drowsiness alert system and “Traffic Sign
Recognition System” and following research questions will be addressed in this report:
Question 1: Identification of the factors those have been limiting the application of the ADAS
technologies within the automobile sector
Question 2: Identification of the factors and aspects those could be applied for the enhancement
of the ADAS performance
sections those cannot be covered in a single file and hence, this report emphasizes on two
important visions including the drowsiness alert system and traffic sign recognition system. In
these both the scenarios, the input data is recorded in the form of the image and/ or video and
passed to the processing unit for the real-time data execution (Villalon Torres & Flores 2017).
The processor will be making the computation on the basis of the algorithms embedded within it
and the output decision will be carried out accordingly. Major five stages of the computer vision
pipeline include the “data processing, objects segmentation and detection, feature extraction,
classification and evaluation (Zeng et al. 2015).” The every stage has its different role including
from the collection of data, processing of data and extraction features. The features those have
been extracted will be passing through different classifiers in manner to for the training (Choi,
Song & Lee 2018). “k-Nearest Neighbor, Naïve Bayes, Linear classifier, Decision Trees, Random
Forests, Multi-Layer Perceptron (MLP), Support Vector Machines (SVM), AdaBoost and ensemble
of various classifiers” comprised of the main classifiers within the computer vision research
(Nguyenn, Ryong and Kyu 2014). (Jung et al. 2018) have noticed it that the approaches have
been not very good for the performance of the ADAS technology considering the conventional
computer vision. Previously, the recognition of the traffic sign was delivered through the
traditional conventional computer system however; te current approaches can be delivered for the
identification of the colors, edges, and extraction of the smaller objects (Sun et al. 2015). In manner
to boost up the performance, many attempts were delivered considering the combination of different
classifiers. SVR (Support Vector Regression) and AdaBoost had contributed in the improvement of
the performance however according to Li and Yand (2016); it has been very subjective in manner to
capture and detect many features including the texture, shape, color, spatial location and others and
was limited for the ambient conditions (Gudigar et al. 2017). Experimental results stated how the
natural conditions such as fog, smog, rain, wind and others make the system vulnerable and thus,
affecting the efficiency of the project.
The considerable areas for the delivery of this project is the consideration of the drowsiness alert
system and recognition of the traffic signs as these are the vital factors for the accidents at the roads
(Liu et al. 2016). Many researchers had contributed in the identification of these major concerns and
tried to eliminate the problem for the enhancement in the efficiency of the ADAS technology. Keser,
Kramar and Nozica (2016) proposed the classification based on three different approaches including
the psychological, vehicle, and behavior based approaches in manner to identify the factors affecting
the overall output of the ADAS technology and driverless vehicles.
4. Research Question, Aim/Objectives and Sub-goals
4. a Research questions
The sector of the ADAS covers a vast sector of the technologies those are comprised for this
technology and hence, for this paper, two major visions have been considered as explained
earlier. This paper will be emphasizing on the drowsiness alert system and “Traffic Sign
Recognition System” and following research questions will be addressed in this report:
Question 1: Identification of the factors those have been limiting the application of the ADAS
technologies within the automobile sector
Question 2: Identification of the factors and aspects those could be applied for the enhancement
of the ADAS performance
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
[Please fill your name]
Question 3: Identification of the factors those could be applied for enhancing the efficiency of the
ADAS system and making it immune from ambient natural conditions.
Question 4: Identification of the aspects those could be applied in ADAS for the enhancement in
the computation for the real-time decision-making and deployment of the technology in the real
world.
4. b Goals
The goal of the report is to make the project much efficient, faster processing, and highly robust
in contrast to be applicable in the real world. The answers of the research question will be
identified through dividing the whole project in sub-activities that will also be helpful in auditing
and monitoring the growth and progress of the report. The list of activities and sub activities
along with the start date, finish date, and time required has been presented in the section 7, based
on which the Gantt chart has been prepared.
5. Theoretical Content/Methodology
Consideration of the driver drowsiness and traffic signal recognition has been an important factor
in context of the efficiency and effectiveness of the ADAS technology and its application in the
real world. The factors affecting the efficiency of this technology can be listed as: bad
performance during the variability’s and vulnerabilities in the real world for example graffiti, fading
traffic signs’ color fading, physical damage, sun glare, occlusion, jittering of camera, lightning
conditions, motion-blur, crafted feature-engineering, and unwanted natural condition for example
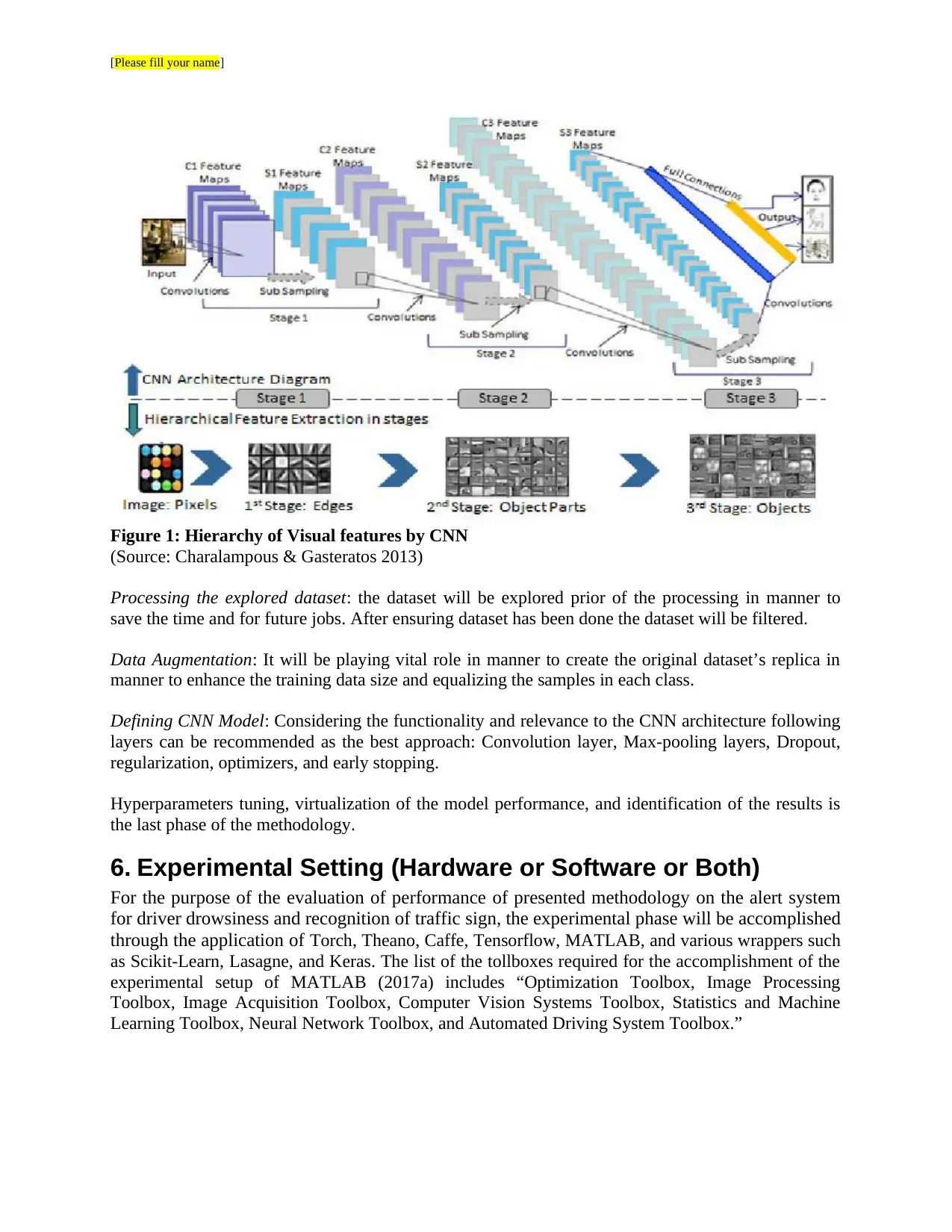
wind, fog, rain and others. CNN’s (Convolutional Neural Networks) has been a biologically inspired
different layer feed forward neural network architecture that is capable of learning more than one
invariant features in relation with the image hierarchy. The first layer is responsible for extracting the
local image features, next layer extracts the abstract features, more advanced extracts the smaller
objects, and the last layer is responsible for extracting the hierarchical fashion features. Following are
the steps of the methodology used for the methodology proposed for this project:
Dataset collection: the datasets will be downloaded from the datasets applicable publically from
different research labs.
Question 3: Identification of the factors those could be applied for enhancing the efficiency of the
ADAS system and making it immune from ambient natural conditions.
Question 4: Identification of the aspects those could be applied in ADAS for the enhancement in
the computation for the real-time decision-making and deployment of the technology in the real
world.
4. b Goals
The goal of the report is to make the project much efficient, faster processing, and highly robust
in contrast to be applicable in the real world. The answers of the research question will be
identified through dividing the whole project in sub-activities that will also be helpful in auditing
and monitoring the growth and progress of the report. The list of activities and sub activities
along with the start date, finish date, and time required has been presented in the section 7, based
on which the Gantt chart has been prepared.
5. Theoretical Content/Methodology
Consideration of the driver drowsiness and traffic signal recognition has been an important factor
in context of the efficiency and effectiveness of the ADAS technology and its application in the
real world. The factors affecting the efficiency of this technology can be listed as: bad
performance during the variability’s and vulnerabilities in the real world for example graffiti, fading
traffic signs’ color fading, physical damage, sun glare, occlusion, jittering of camera, lightning
conditions, motion-blur, crafted feature-engineering, and unwanted natural condition for example
wind, fog, rain and others. CNN’s (Convolutional Neural Networks) has been a biologically inspired
different layer feed forward neural network architecture that is capable of learning more than one
invariant features in relation with the image hierarchy. The first layer is responsible for extracting the
local image features, next layer extracts the abstract features, more advanced extracts the smaller
objects, and the last layer is responsible for extracting the hierarchical fashion features. Following are
the steps of the methodology used for the methodology proposed for this project:
Dataset collection: the datasets will be downloaded from the datasets applicable publically from
different research labs.
[Please fill your name]
Figure 1: Hierarchy of Visual features by CNN
(Source: Charalampous & Gasteratos 2013)
Processing the explored dataset: the dataset will be explored prior of the processing in manner to
save the time and for future jobs. After ensuring dataset has been done the dataset will be filtered.
Data Augmentation: It will be playing vital role in manner to create the original dataset’s replica in
manner to enhance the training data size and equalizing the samples in each class.
Defining CNN Model: Considering the functionality and relevance to the CNN architecture following
layers can be recommended as the best approach: Convolution layer, Max-pooling layers, Dropout,
regularization, optimizers, and early stopping.
Hyperparameters tuning, virtualization of the model performance, and identification of the results is
the last phase of the methodology.
6. Experimental Setting (Hardware or Software or Both)
For the purpose of the evaluation of performance of presented methodology on the alert system
for driver drowsiness and recognition of traffic sign, the experimental phase will be accomplished
through the application of Torch, Theano, Caffe, Tensorflow, MATLAB, and various wrappers such
as Scikit-Learn, Lasagne, and Keras. The list of the tollboxes required for the accomplishment of the
experimental setup of MATLAB (2017a) includes “Optimization Toolbox, Image Processing
Toolbox, Image Acquisition Toolbox, Computer Vision Systems Toolbox, Statistics and Machine
Learning Toolbox, Neural Network Toolbox, and Automated Driving System Toolbox.”
Figure 1: Hierarchy of Visual features by CNN
(Source: Charalampous & Gasteratos 2013)
Processing the explored dataset: the dataset will be explored prior of the processing in manner to
save the time and for future jobs. After ensuring dataset has been done the dataset will be filtered.
Data Augmentation: It will be playing vital role in manner to create the original dataset’s replica in
manner to enhance the training data size and equalizing the samples in each class.
Defining CNN Model: Considering the functionality and relevance to the CNN architecture following
layers can be recommended as the best approach: Convolution layer, Max-pooling layers, Dropout,
regularization, optimizers, and early stopping.
Hyperparameters tuning, virtualization of the model performance, and identification of the results is
the last phase of the methodology.
6. Experimental Setting (Hardware or Software or Both)
For the purpose of the evaluation of performance of presented methodology on the alert system
for driver drowsiness and recognition of traffic sign, the experimental phase will be accomplished
through the application of Torch, Theano, Caffe, Tensorflow, MATLAB, and various wrappers such
as Scikit-Learn, Lasagne, and Keras. The list of the tollboxes required for the accomplishment of the
experimental setup of MATLAB (2017a) includes “Optimization Toolbox, Image Processing
Toolbox, Image Acquisition Toolbox, Computer Vision Systems Toolbox, Statistics and Machine
Learning Toolbox, Neural Network Toolbox, and Automated Driving System Toolbox.”
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
[Please fill your name]
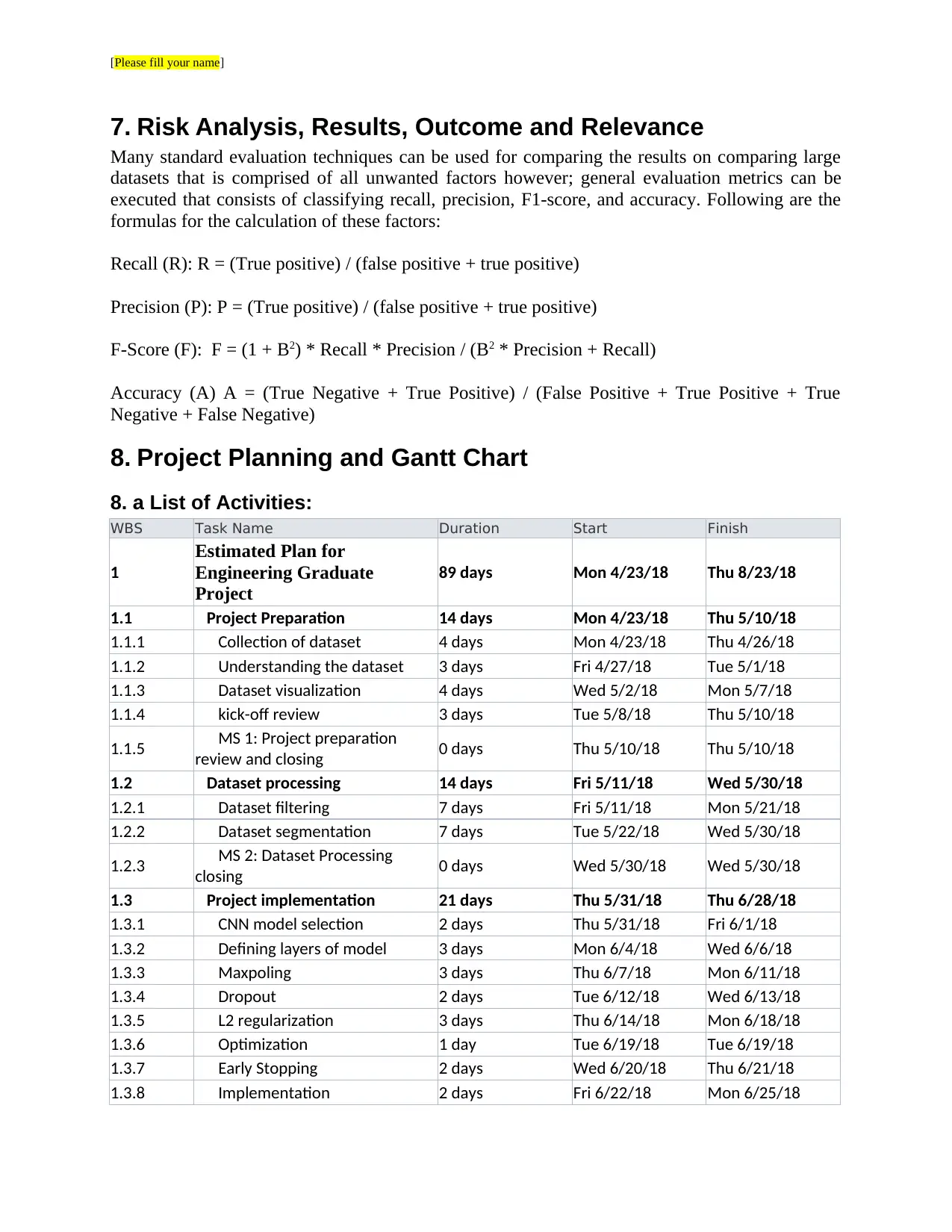
7. Risk Analysis, Results, Outcome and Relevance
Many standard evaluation techniques can be used for comparing the results on comparing large
datasets that is comprised of all unwanted factors however; general evaluation metrics can be
executed that consists of classifying recall, precision, F1-score, and accuracy. Following are the
formulas for the calculation of these factors:
Recall (R): R = (True positive) / (false positive + true positive)
Precision (P): P = (True positive) / (false positive + true positive)
F-Score (F): F = (1 + B2) * Recall * Precision / (B2 * Precision + Recall)
Accuracy (A) A = (True Negative + True Positive) / (False Positive + True Positive + True
Negative + False Negative)
8. Project Planning and Gantt Chart
8. a List of Activities:
WBS Task Name Duration Start Finish
1
Estimated Plan for
Engineering Graduate
Project
89 days Mon 4/23/18 Thu 8/23/18
1.1 Project Preparation 14 days Mon 4/23/18 Thu 5/10/18
1.1.1 Collection of dataset 4 days Mon 4/23/18 Thu 4/26/18
1.1.2 Understanding the dataset 3 days Fri 4/27/18 Tue 5/1/18
1.1.3 Dataset visualization 4 days Wed 5/2/18 Mon 5/7/18
1.1.4 kick-off review 3 days Tue 5/8/18 Thu 5/10/18
1.1.5 MS 1: Project preparation
review and closing 0 days Thu 5/10/18 Thu 5/10/18
1.2 Dataset processing 14 days Fri 5/11/18 Wed 5/30/18
1.2.1 Dataset filtering 7 days Fri 5/11/18 Mon 5/21/18
1.2.2 Dataset segmentation 7 days Tue 5/22/18 Wed 5/30/18
1.2.3 MS 2: Dataset Processing
closing 0 days Wed 5/30/18 Wed 5/30/18
1.3 Project implementation 21 days Thu 5/31/18 Thu 6/28/18
1.3.1 CNN model selection 2 days Thu 5/31/18 Fri 6/1/18
1.3.2 Defining layers of model 3 days Mon 6/4/18 Wed 6/6/18
1.3.3 Maxpoling 3 days Thu 6/7/18 Mon 6/11/18
1.3.4 Dropout 2 days Tue 6/12/18 Wed 6/13/18
1.3.5 L2 regularization 3 days Thu 6/14/18 Mon 6/18/18
1.3.6 Optimization 1 day Tue 6/19/18 Tue 6/19/18
1.3.7 Early Stopping 2 days Wed 6/20/18 Thu 6/21/18
1.3.8 Implementation 2 days Fri 6/22/18 Mon 6/25/18
7. Risk Analysis, Results, Outcome and Relevance
Many standard evaluation techniques can be used for comparing the results on comparing large
datasets that is comprised of all unwanted factors however; general evaluation metrics can be
executed that consists of classifying recall, precision, F1-score, and accuracy. Following are the
formulas for the calculation of these factors:
Recall (R): R = (True positive) / (false positive + true positive)
Precision (P): P = (True positive) / (false positive + true positive)
F-Score (F): F = (1 + B2) * Recall * Precision / (B2 * Precision + Recall)
Accuracy (A) A = (True Negative + True Positive) / (False Positive + True Positive + True
Negative + False Negative)
8. Project Planning and Gantt Chart
8. a List of Activities:
WBS Task Name Duration Start Finish
1
Estimated Plan for
Engineering Graduate
Project
89 days Mon 4/23/18 Thu 8/23/18
1.1 Project Preparation 14 days Mon 4/23/18 Thu 5/10/18
1.1.1 Collection of dataset 4 days Mon 4/23/18 Thu 4/26/18
1.1.2 Understanding the dataset 3 days Fri 4/27/18 Tue 5/1/18
1.1.3 Dataset visualization 4 days Wed 5/2/18 Mon 5/7/18
1.1.4 kick-off review 3 days Tue 5/8/18 Thu 5/10/18
1.1.5 MS 1: Project preparation
review and closing 0 days Thu 5/10/18 Thu 5/10/18
1.2 Dataset processing 14 days Fri 5/11/18 Wed 5/30/18
1.2.1 Dataset filtering 7 days Fri 5/11/18 Mon 5/21/18
1.2.2 Dataset segmentation 7 days Tue 5/22/18 Wed 5/30/18
1.2.3 MS 2: Dataset Processing
closing 0 days Wed 5/30/18 Wed 5/30/18
1.3 Project implementation 21 days Thu 5/31/18 Thu 6/28/18
1.3.1 CNN model selection 2 days Thu 5/31/18 Fri 6/1/18
1.3.2 Defining layers of model 3 days Mon 6/4/18 Wed 6/6/18
1.3.3 Maxpoling 3 days Thu 6/7/18 Mon 6/11/18
1.3.4 Dropout 2 days Tue 6/12/18 Wed 6/13/18
1.3.5 L2 regularization 3 days Thu 6/14/18 Mon 6/18/18
1.3.6 Optimization 1 day Tue 6/19/18 Tue 6/19/18
1.3.7 Early Stopping 2 days Wed 6/20/18 Thu 6/21/18
1.3.8 Implementation 2 days Fri 6/22/18 Mon 6/25/18
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
[Please fill your name]
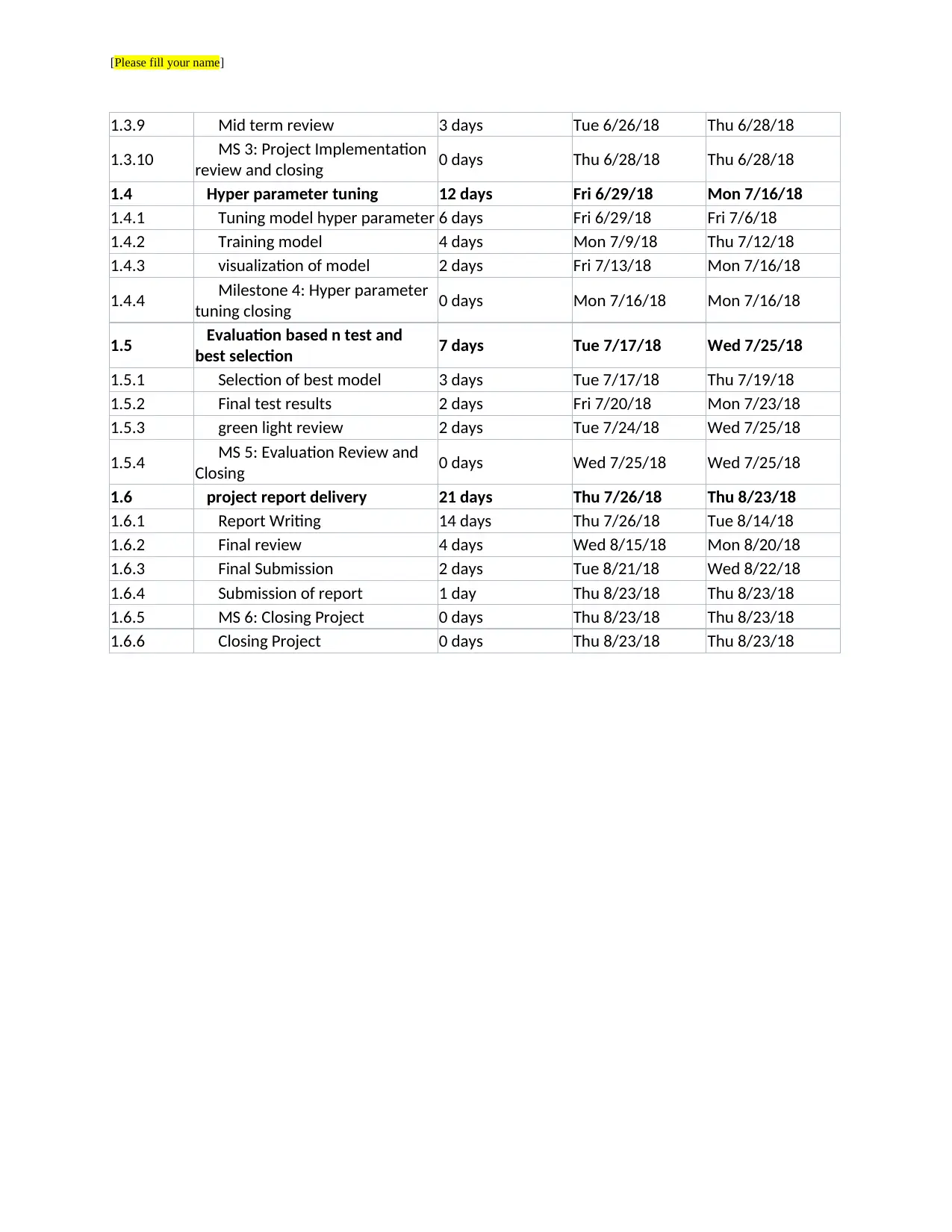
1.3.9 Mid term review 3 days Tue 6/26/18 Thu 6/28/18
1.3.10 MS 3: Project Implementation
review and closing 0 days Thu 6/28/18 Thu 6/28/18
1.4 Hyper parameter tuning 12 days Fri 6/29/18 Mon 7/16/18
1.4.1 Tuning model hyper parameter 6 days Fri 6/29/18 Fri 7/6/18
1.4.2 Training model 4 days Mon 7/9/18 Thu 7/12/18
1.4.3 visualization of model 2 days Fri 7/13/18 Mon 7/16/18
1.4.4 Milestone 4: Hyper parameter
tuning closing 0 days Mon 7/16/18 Mon 7/16/18
1.5 Evaluation based n test and
best selection 7 days Tue 7/17/18 Wed 7/25/18
1.5.1 Selection of best model 3 days Tue 7/17/18 Thu 7/19/18
1.5.2 Final test results 2 days Fri 7/20/18 Mon 7/23/18
1.5.3 green light review 2 days Tue 7/24/18 Wed 7/25/18
1.5.4 MS 5: Evaluation Review and
Closing 0 days Wed 7/25/18 Wed 7/25/18
1.6 project report delivery 21 days Thu 7/26/18 Thu 8/23/18
1.6.1 Report Writing 14 days Thu 7/26/18 Tue 8/14/18
1.6.2 Final review 4 days Wed 8/15/18 Mon 8/20/18
1.6.3 Final Submission 2 days Tue 8/21/18 Wed 8/22/18
1.6.4 Submission of report 1 day Thu 8/23/18 Thu 8/23/18
1.6.5 MS 6: Closing Project 0 days Thu 8/23/18 Thu 8/23/18
1.6.6 Closing Project 0 days Thu 8/23/18 Thu 8/23/18
1.3.9 Mid term review 3 days Tue 6/26/18 Thu 6/28/18
1.3.10 MS 3: Project Implementation
review and closing 0 days Thu 6/28/18 Thu 6/28/18
1.4 Hyper parameter tuning 12 days Fri 6/29/18 Mon 7/16/18
1.4.1 Tuning model hyper parameter 6 days Fri 6/29/18 Fri 7/6/18
1.4.2 Training model 4 days Mon 7/9/18 Thu 7/12/18
1.4.3 visualization of model 2 days Fri 7/13/18 Mon 7/16/18
1.4.4 Milestone 4: Hyper parameter
tuning closing 0 days Mon 7/16/18 Mon 7/16/18
1.5 Evaluation based n test and
best selection 7 days Tue 7/17/18 Wed 7/25/18
1.5.1 Selection of best model 3 days Tue 7/17/18 Thu 7/19/18
1.5.2 Final test results 2 days Fri 7/20/18 Mon 7/23/18
1.5.3 green light review 2 days Tue 7/24/18 Wed 7/25/18
1.5.4 MS 5: Evaluation Review and
Closing 0 days Wed 7/25/18 Wed 7/25/18
1.6 project report delivery 21 days Thu 7/26/18 Thu 8/23/18
1.6.1 Report Writing 14 days Thu 7/26/18 Tue 8/14/18
1.6.2 Final review 4 days Wed 8/15/18 Mon 8/20/18
1.6.3 Final Submission 2 days Tue 8/21/18 Wed 8/22/18
1.6.4 Submission of report 1 day Thu 8/23/18 Thu 8/23/18
1.6.5 MS 6: Closing Project 0 days Thu 8/23/18 Thu 8/23/18
1.6.6 Closing Project 0 days Thu 8/23/18 Thu 8/23/18
[Please fill your name]
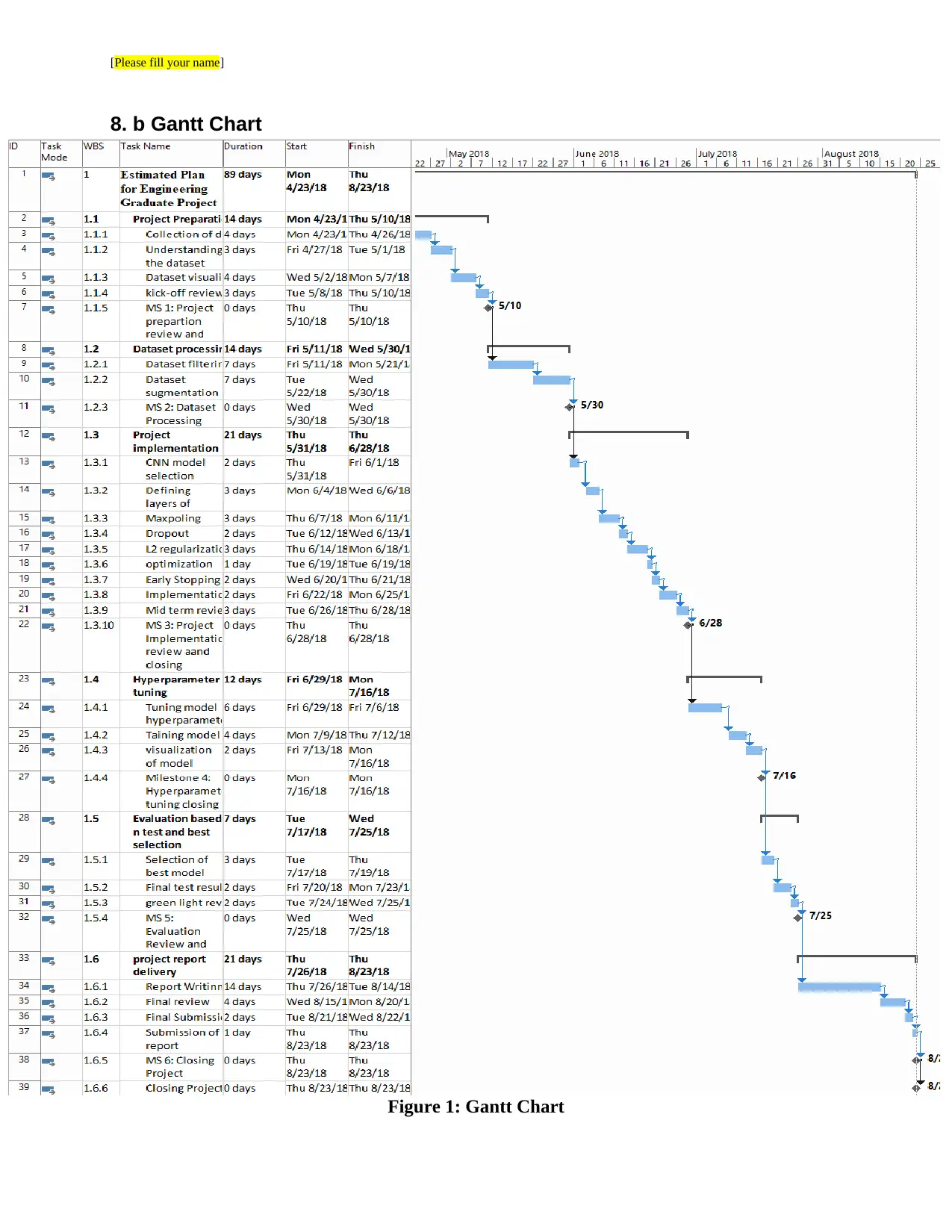
8. b Gantt Chart
Figure 1: Gantt Chart
8. b Gantt Chart
Figure 1: Gantt Chart
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide

[Please fill your name]
(Source: Created by Author Using MS Project)
9. Conclusions
ADAS can be referred to the drivers for better and secured driving in an automated manner and
the technology can be applicable in the real world through enhancing the real world practice.
There are many beneficial aspects n the application of this technology however; it has not been
much efficient and effective in the real world due to many natural phenomenon. In the various
conditions, the technology has not been very efficient because of the factors such as rotation,
scaling, shearing, blur, shifting, motion, occlusion, and many more. The project was delivered aiming
at the elimination of the challenges being identified in the application of the ADAS and improves the
efficiency, robustness, and performance in manner to make the technology much reliable for every
individual using the ADSAS technology. The report presents a single integrated model that has been
working on two different modalities through the addition of other integrated functionalities within a
system that result in the reduction of economic cost. This project contributes in the addition of the
information within the context of the literature available in the context of the driverless cars.
(Source: Created by Author Using MS Project)
9. Conclusions
ADAS can be referred to the drivers for better and secured driving in an automated manner and
the technology can be applicable in the real world through enhancing the real world practice.
There are many beneficial aspects n the application of this technology however; it has not been
much efficient and effective in the real world due to many natural phenomenon. In the various
conditions, the technology has not been very efficient because of the factors such as rotation,
scaling, shearing, blur, shifting, motion, occlusion, and many more. The project was delivered aiming
at the elimination of the challenges being identified in the application of the ADAS and improves the
efficiency, robustness, and performance in manner to make the technology much reliable for every
individual using the ADSAS technology. The report presents a single integrated model that has been
working on two different modalities through the addition of other integrated functionalities within a
system that result in the reduction of economic cost. This project contributes in the addition of the
information within the context of the literature available in the context of the driverless cars.
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
[Please fill your name]
10. References
Charalampous, K. & Gasteratos, A. 2013, 'Bio-inspired deep learning model for object recognition',
2013 IEEE International Conference on Imaging Systems and Techniques (IST), pp. 51-5.
Choi, J., Song, E. & Lee, S., 2018, ‘L-Tree: A Local-Area-Learning-Based Tree Induction Algorithm
for Image Classification’, Sensors, 18(1), p.306.
Gudigar, A., Chokkadi, S., Raghavendra, U. & Acharya, U.R., 2017, ‘An efficient traffic sign
recognition based on graph embedding features. Neural Computing and Applications’, pp.1-
13.
Jung, S., Cho, S., Lee, D., Lee, H. & Shim, D.H., 2018, ‘A direct visual servoing‐based framework
for the 2016 IROS Autonomous Drone Racing Challenge’, Journal of Field Robotics, 35(1),
pp.146-166.
Kale, A.J. & Mahajan, R.C., 2015, October, ‘A road sign detection and the recognition for Driver
Assistance Systems. In Energy Systems and Applications’, 2015 International Conference
on (pp. 69-74). IEEE.
Keser, T., Kramar, G. & Nožica, D., 2016, October, ‘Traffic signs shape recognition based on contour
descriptor analysis. In Smart Systems and Technologies (SST)’, International Conference
on (pp. 199-204). IEEE.
Li, C. & Yang, C., 2016, September, ‘The research on traffic sign recognition based on deep learning.
In Communications and Information Technologies (ISCIT)’, 2016 16th International
Symposium on (pp. 156-161). IEEE.
Liu, H., Stoll, N., Junginger, S., Zhang, J., Ghandour, M. & Thurow, K., 2016, July, ‘Human-Mobile
Robot Interaction in laboratories using Kinect Sensor and ELM based face feature
recognition. In Human System Interactions (HSI)’, 2016 9th International Conference on (pp.
197-202). IEEE.
Nguyen, B.T., Ryong, S.J. & Kyu, K.J., 2014, July, ‘Fast traffic sign detection under challenging
conditions. In Audio, Language and Image Processing (ICALIP)’, 2014 International
Conference on (pp. 749-752). IEEE.
Sun, X., Liu, L., Wang, H., Song, W. and Lu, J., 2015, December, ‘Image classification via support
vector machine. In Computer Science and Network Technology (ICCSNT)’, 2015 4th
International Conference on (Vol. 1, pp. 485-489). IEEE.
Villalón-Sepúlveda, G., Torres-Torriti, M. & Flores-Calero, M., 2017, ‘Traffic sign detection system
for locating road intersections and roundabouts: the Chilean case’, Sensors, 17(6), p.1207.
Zeng, Y., Xu, X., Fang, Y. & Zhao, K., 2015, ‘Traffic sign recognition using deep convolutional
networks and extreme learning machine in Intelligence Science and Big Data Engineering’,
Image and Video Data Engineering. In 5th International Conference. IScIDE.
10. References
Charalampous, K. & Gasteratos, A. 2013, 'Bio-inspired deep learning model for object recognition',
2013 IEEE International Conference on Imaging Systems and Techniques (IST), pp. 51-5.
Choi, J., Song, E. & Lee, S., 2018, ‘L-Tree: A Local-Area-Learning-Based Tree Induction Algorithm
for Image Classification’, Sensors, 18(1), p.306.
Gudigar, A., Chokkadi, S., Raghavendra, U. & Acharya, U.R., 2017, ‘An efficient traffic sign
recognition based on graph embedding features. Neural Computing and Applications’, pp.1-
13.
Jung, S., Cho, S., Lee, D., Lee, H. & Shim, D.H., 2018, ‘A direct visual servoing‐based framework
for the 2016 IROS Autonomous Drone Racing Challenge’, Journal of Field Robotics, 35(1),
pp.146-166.
Kale, A.J. & Mahajan, R.C., 2015, October, ‘A road sign detection and the recognition for Driver
Assistance Systems. In Energy Systems and Applications’, 2015 International Conference
on (pp. 69-74). IEEE.
Keser, T., Kramar, G. & Nožica, D., 2016, October, ‘Traffic signs shape recognition based on contour
descriptor analysis. In Smart Systems and Technologies (SST)’, International Conference
on (pp. 199-204). IEEE.
Li, C. & Yang, C., 2016, September, ‘The research on traffic sign recognition based on deep learning.
In Communications and Information Technologies (ISCIT)’, 2016 16th International
Symposium on (pp. 156-161). IEEE.
Liu, H., Stoll, N., Junginger, S., Zhang, J., Ghandour, M. & Thurow, K., 2016, July, ‘Human-Mobile
Robot Interaction in laboratories using Kinect Sensor and ELM based face feature
recognition. In Human System Interactions (HSI)’, 2016 9th International Conference on (pp.
197-202). IEEE.
Nguyen, B.T., Ryong, S.J. & Kyu, K.J., 2014, July, ‘Fast traffic sign detection under challenging
conditions. In Audio, Language and Image Processing (ICALIP)’, 2014 International
Conference on (pp. 749-752). IEEE.
Sun, X., Liu, L., Wang, H., Song, W. and Lu, J., 2015, December, ‘Image classification via support
vector machine. In Computer Science and Network Technology (ICCSNT)’, 2015 4th
International Conference on (Vol. 1, pp. 485-489). IEEE.
Villalón-Sepúlveda, G., Torres-Torriti, M. & Flores-Calero, M., 2017, ‘Traffic sign detection system
for locating road intersections and roundabouts: the Chilean case’, Sensors, 17(6), p.1207.
Zeng, Y., Xu, X., Fang, Y. & Zhao, K., 2015, ‘Traffic sign recognition using deep convolutional
networks and extreme learning machine in Intelligence Science and Big Data Engineering’,
Image and Video Data Engineering. In 5th International Conference. IScIDE.
1 out of 11
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.