EGB211 Computer Lab Assignment: Dynamics & Pendulum System Analysis
VerifiedAdded on 2023/06/13
|19
|2881
|481
Homework Assignment
AI Summary
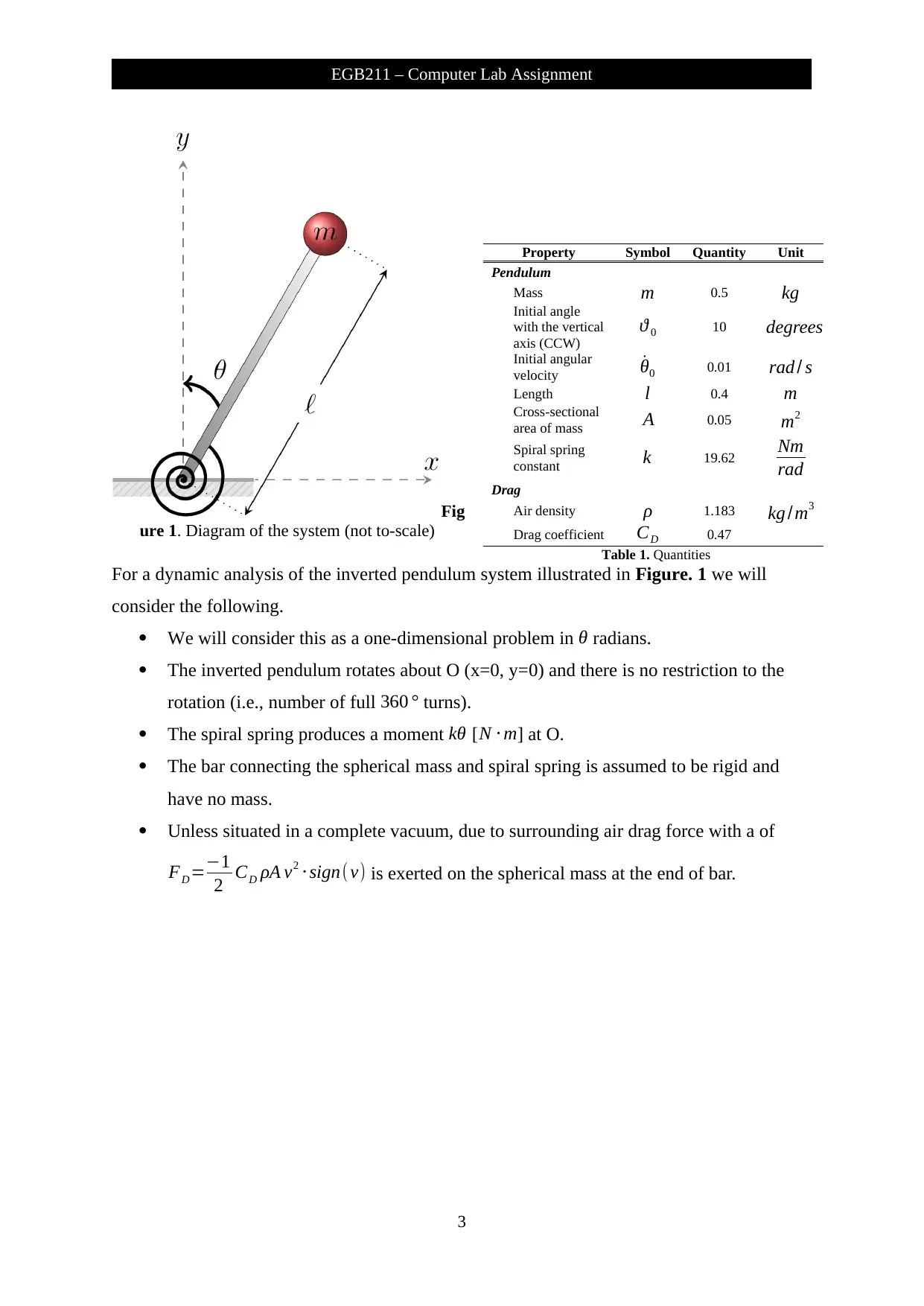
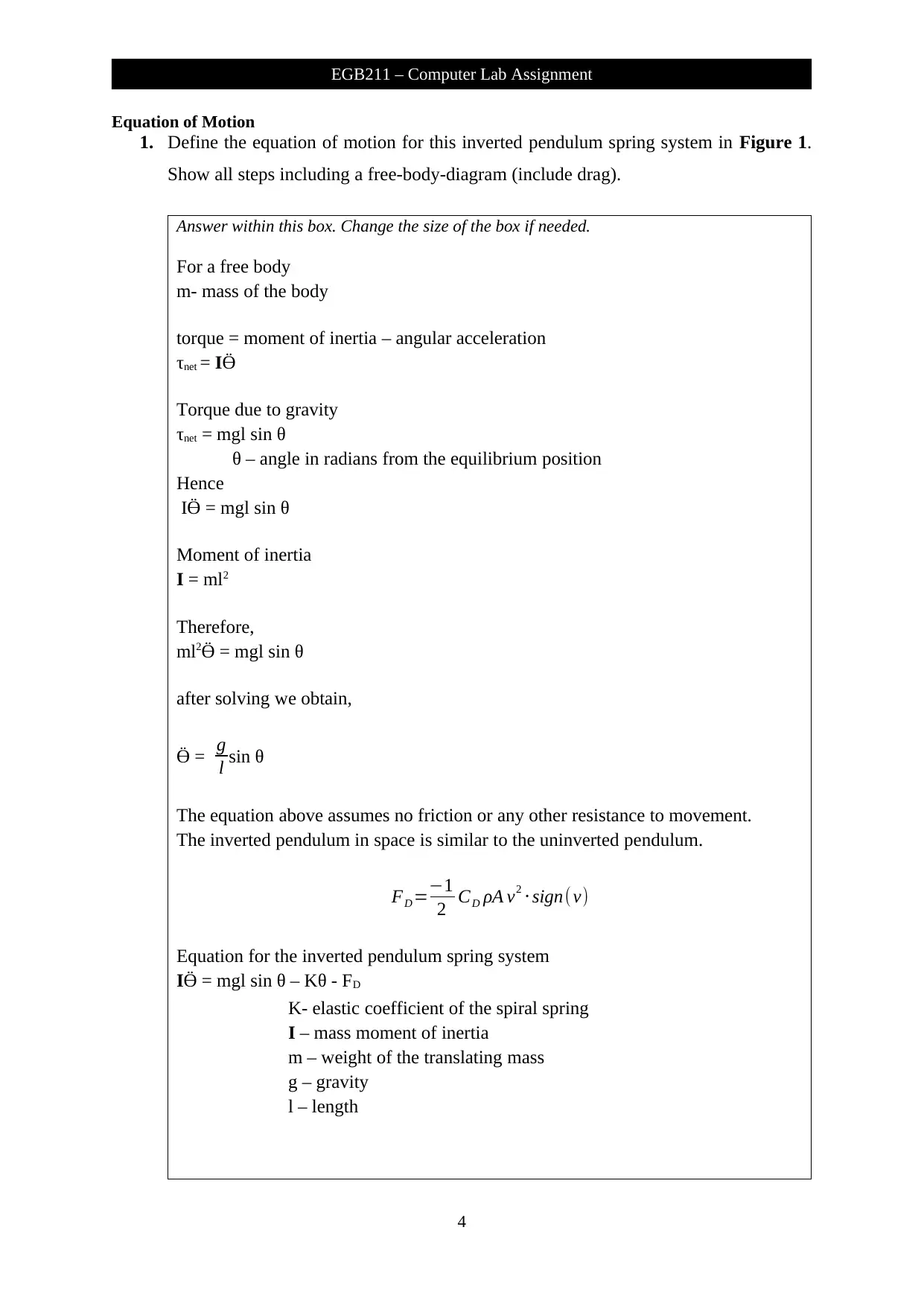
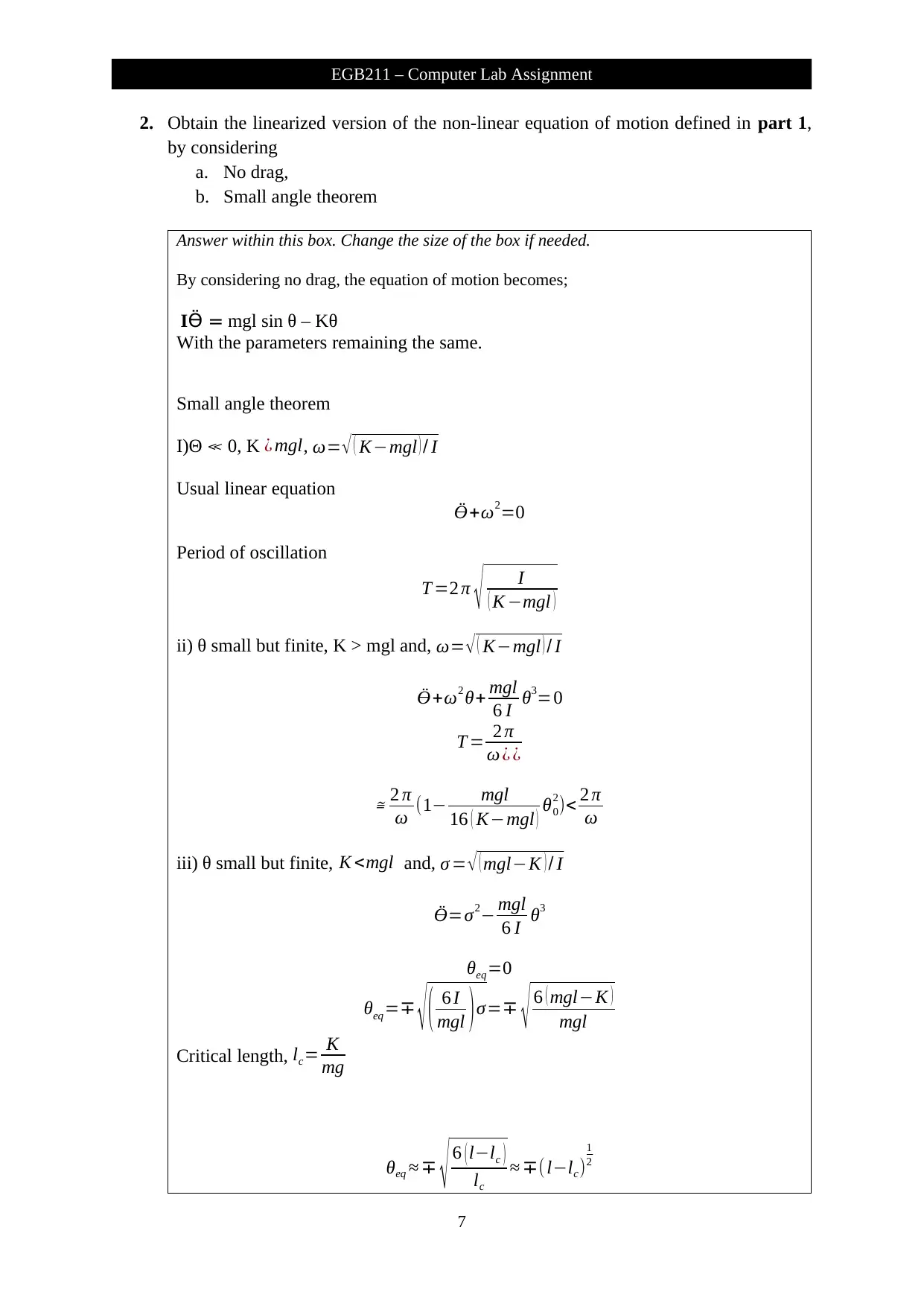
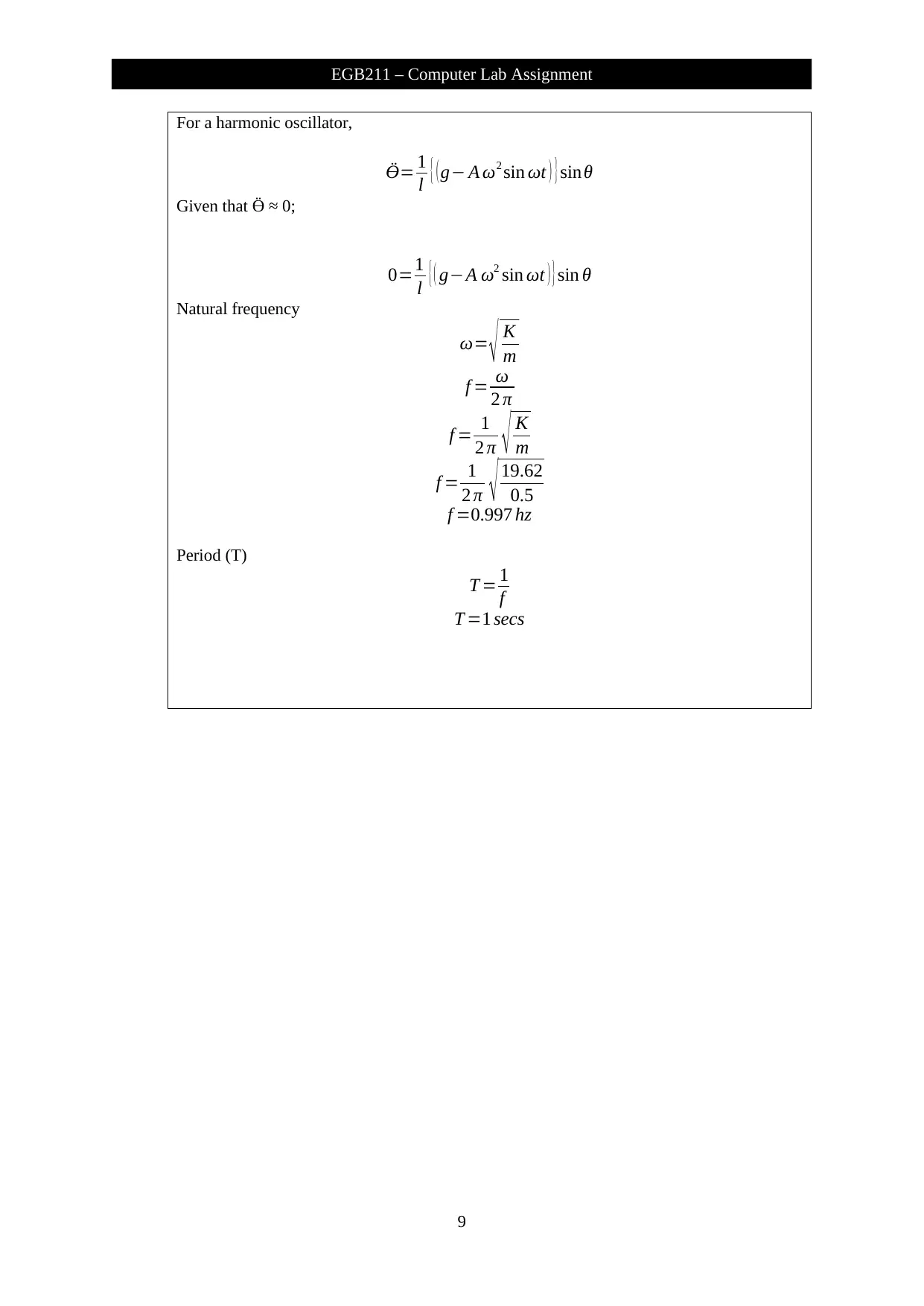
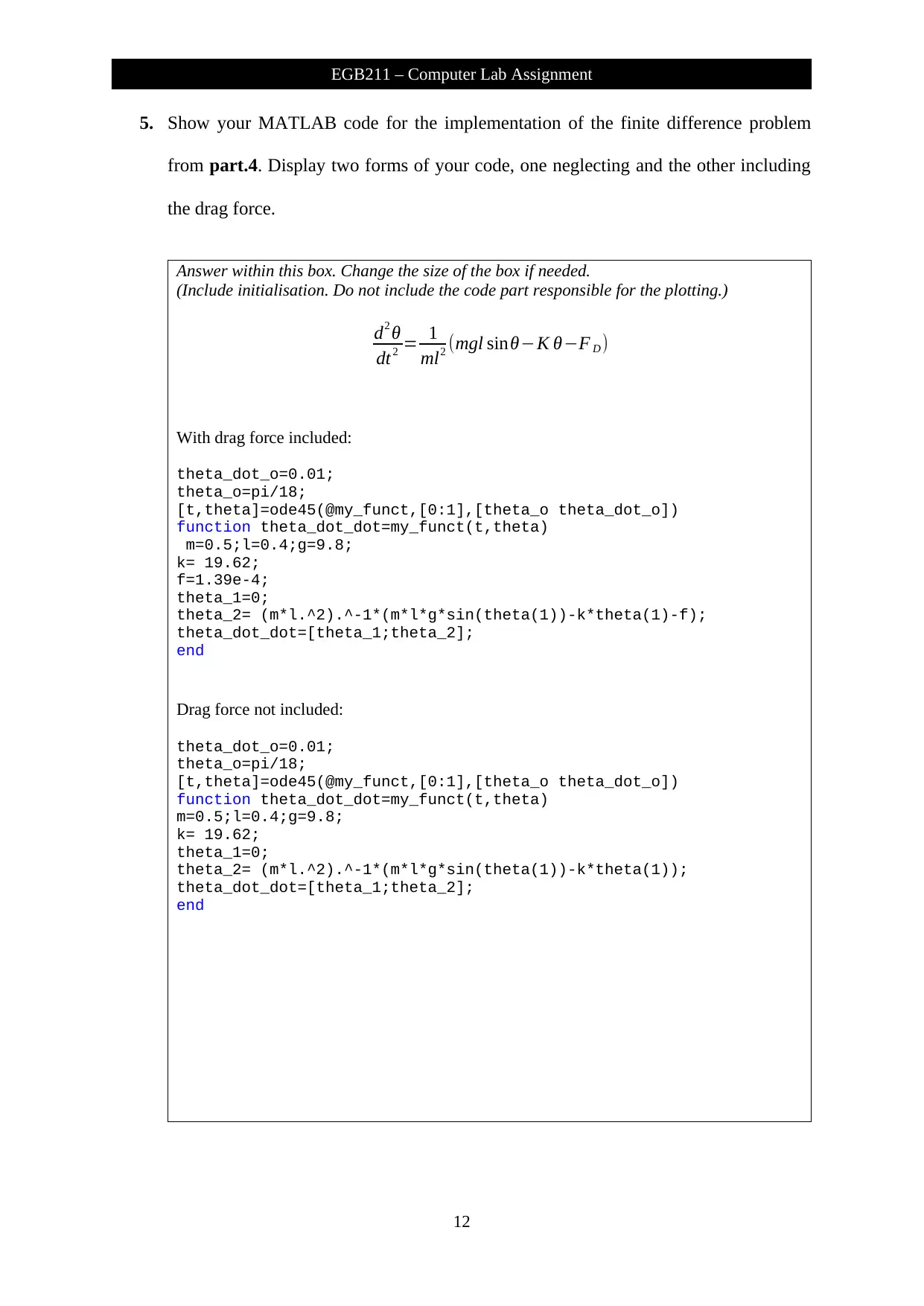
This EGB211 computer lab assignment delves into the dynamics of an inverted pendulum system, comparing analytical and numerical solutions. The assignment begins by deriving the equation of motion for the system, considering factors like gravity, spring force, and drag. It then linearizes the equation using the small angle theorem and develops an analytical solution based on harmonic oscillator principles. The assignment further explores numerical solutions using the finite difference method implemented in MATLAB, with and without considering drag force. The impact of the time-step on the accuracy of the numerical solution is analyzed, and the results from the analytical and numerical methods are compared graphically for angle, angular speed and angular acceleration. The MATLAB code for implementing the finite difference method is also provided. This comprehensive analysis provides insights into the behavior of non-linear dynamic systems and the application of numerical methods in solving complex engineering problems. Desklib provides a variety of assignment solutions and study tools for students.





1 out of 19
Related Documents





Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2025 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.