Ask a question from expert
ENEM14015 - Dynamic System Modelling and Control
CQUniversity Australia
Dynamic System Modelling and Control (ENEM14015)
Added on 2020-03-02
About This Document
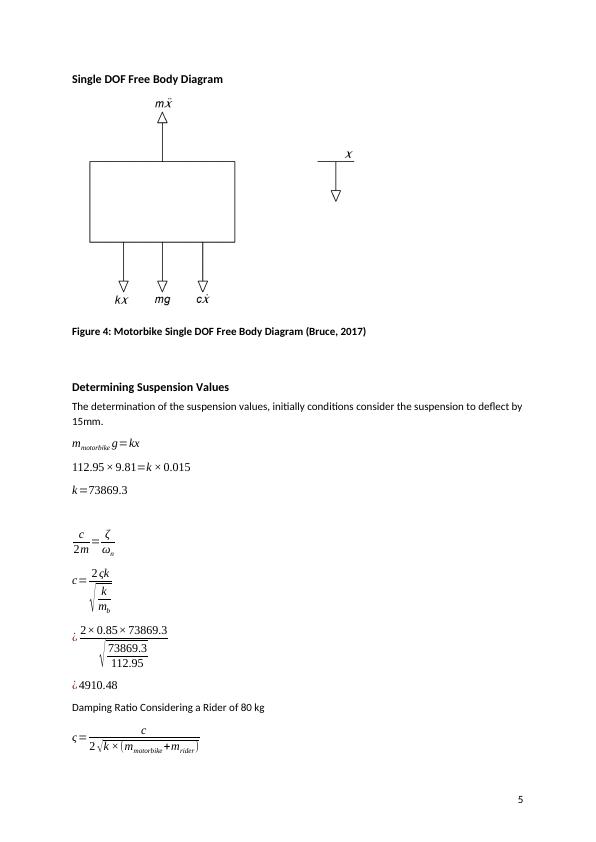
In this document, we will discuss models of the suspension of a motorbike using spring and dampers which have to be developed and the business models have to be analyzed to understand the performance of the system. Also, we cover the Suitable assumptions which have been made to design the system and the performance of the system under various parameters. Calculations have been carried out to find the damping factors and spring constants of the suspension and the results.
ENEM14015 - Dynamic System Modelling and Control
CQUniversity Australia
Dynamic System Modelling and Control (ENEM14015)
Added on 2020-03-02

End of preview
Want to access all the pages? Upload your documents or become a member.