Ask a question from expert
MECH3422 - Dynamic System Modelling and Control
10 Pages1352 Words258 Views
Ishik University
Building Services Engineering (MECH 3422)
Added on 2020-03-07
About This Document
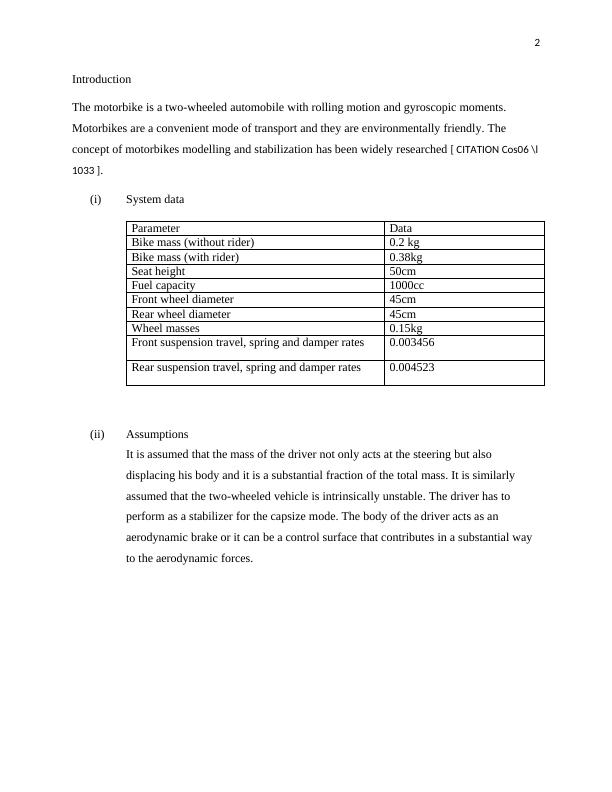
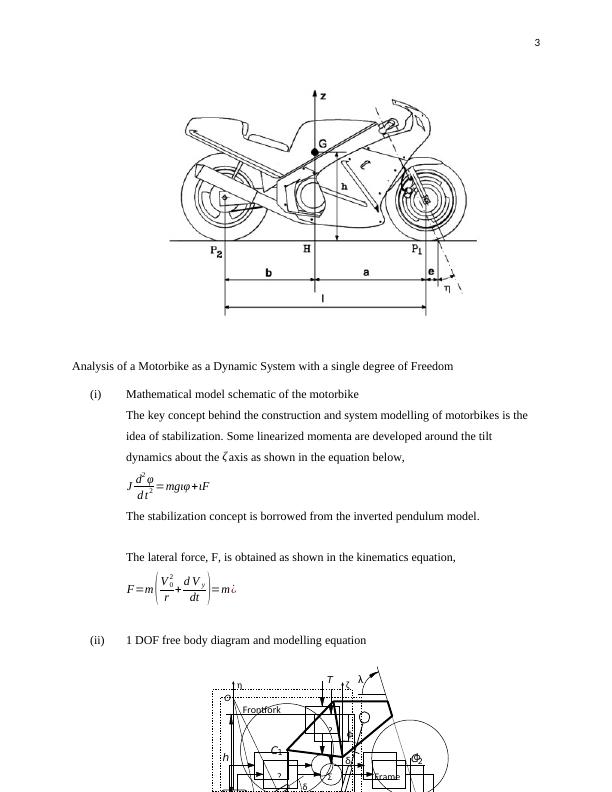
Dynamic System Modelling and Control: The motorbike is a two-wheeled automobile with a rolling motion and gyroscopic moments. Motorbikes are a convenient mode of transport and they are environmentally friendly.
MECH3422 - Dynamic System Modelling and Control
Ishik University
Building Services Engineering (MECH 3422)
Added on 2020-03-07
BookmarkShareRelated Documents

End of preview
Want to access all the pages? Upload your documents or become a member.
Advanced Dynamic Modeling, Simulation and Control of Quad Bike's Engine and Drive Train Performance
|15
|1301
|293