Analysis of Equilibrium Speed in Vehicle Dynamics Project
VerifiedAdded on 2020/04/15
|6
|746
|86
Project
AI Summary
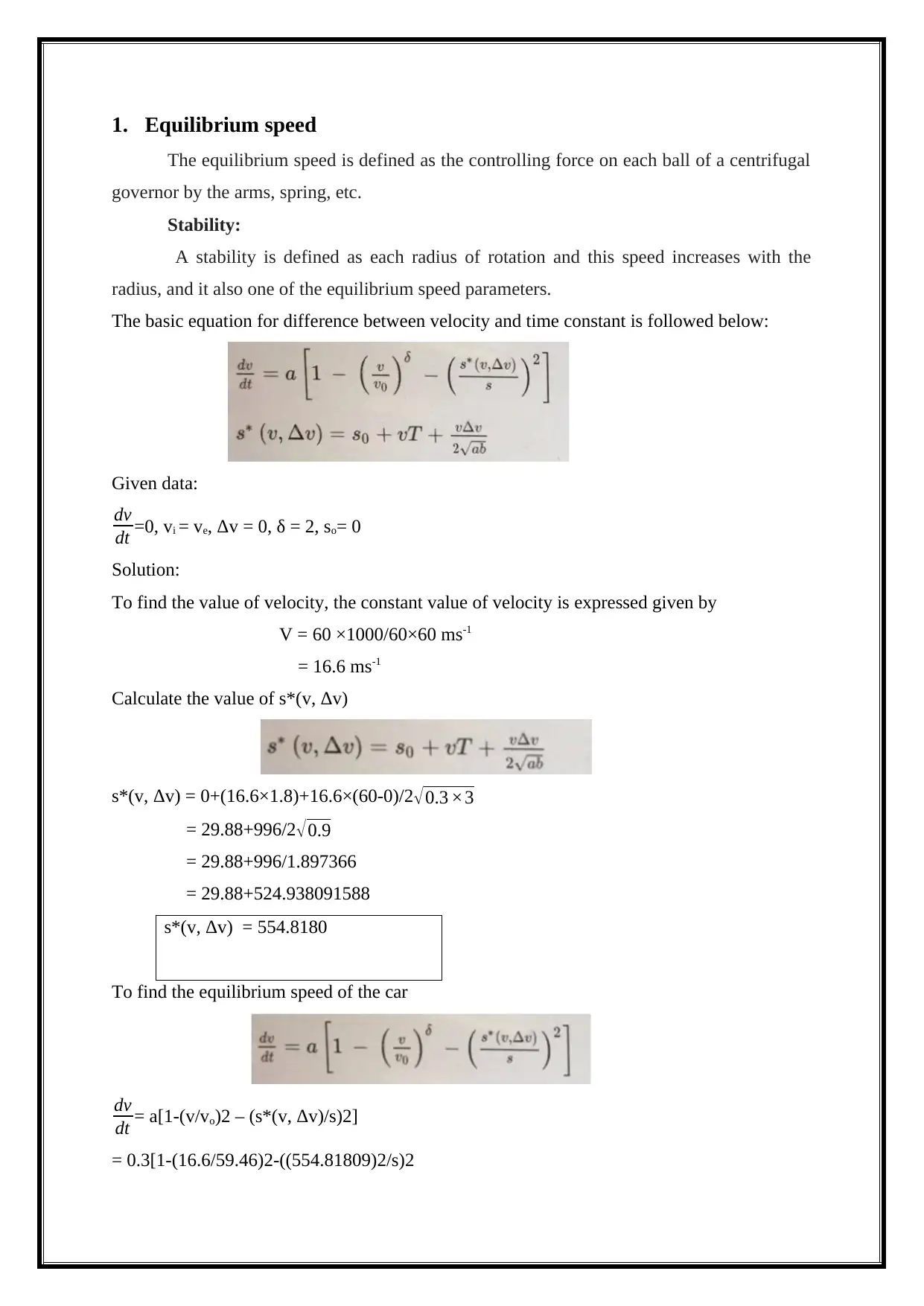
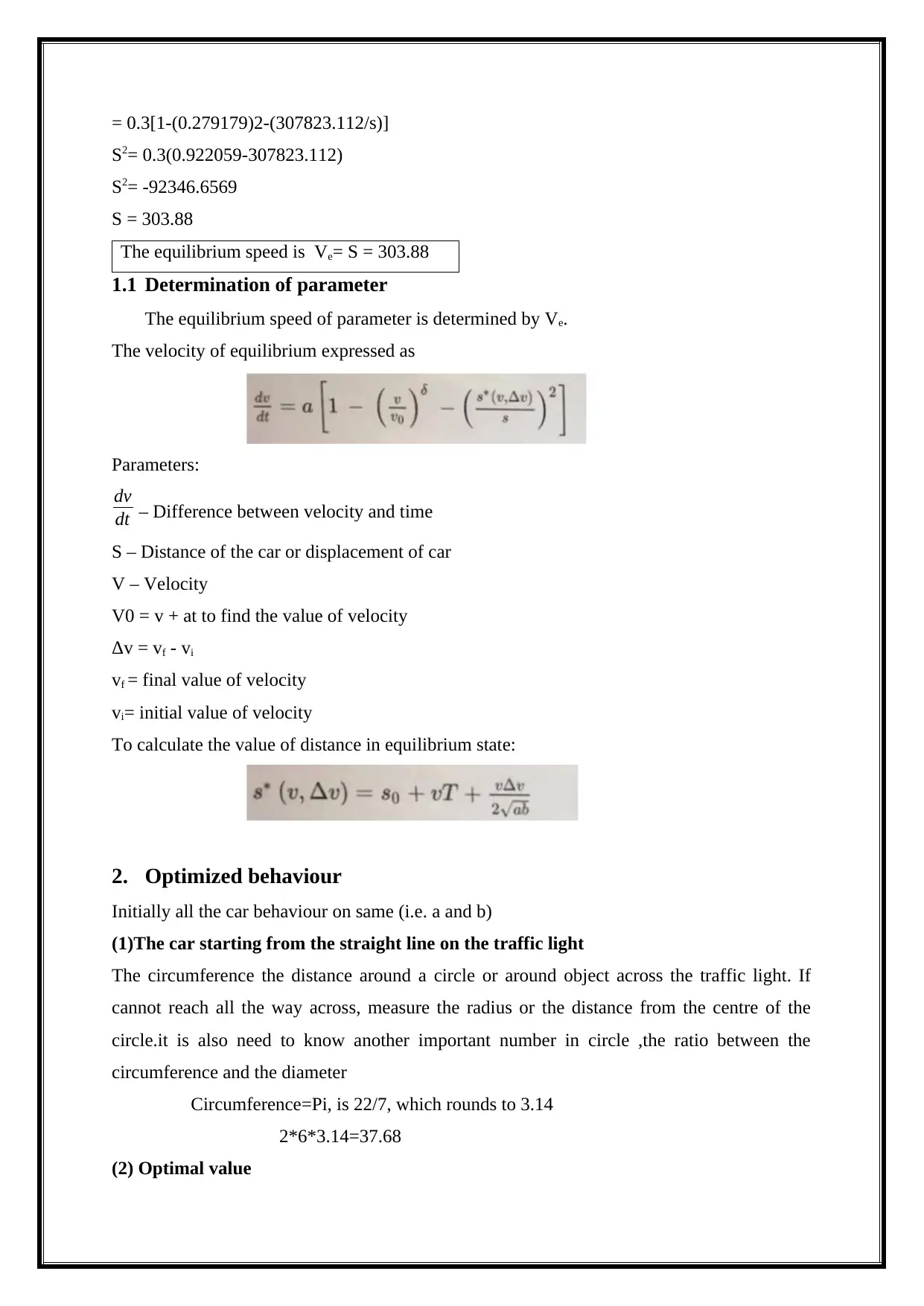
This project delves into the analysis of equilibrium speed in vehicle dynamics, exploring the factors that influence it, such as the controlling forces of a centrifugal governor. It calculates equilibrium speed using provided data and equations, considering parameters like velocity, time, and displacement. The project then examines optimized car behavior, including circular motion and acceleration calculations. Furthermore, it addresses the implications of mixed car scenarios, comparing the behaviors of traditional and self-driving cars, including the impact of adaptive cruise control and the challenges of integrating both types of vehicles on the road. The project uses equations to find the value of velocity and equilibrium speed, and also considers the circumference and motion of cars in a circular road.
1 out of 6
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.