ENG3104 Assignment 3: Numerical Methods for Engineering Simulation
VerifiedAdded on 2022/10/14
|23
|3294
|15
Homework Assignment
AI Summary
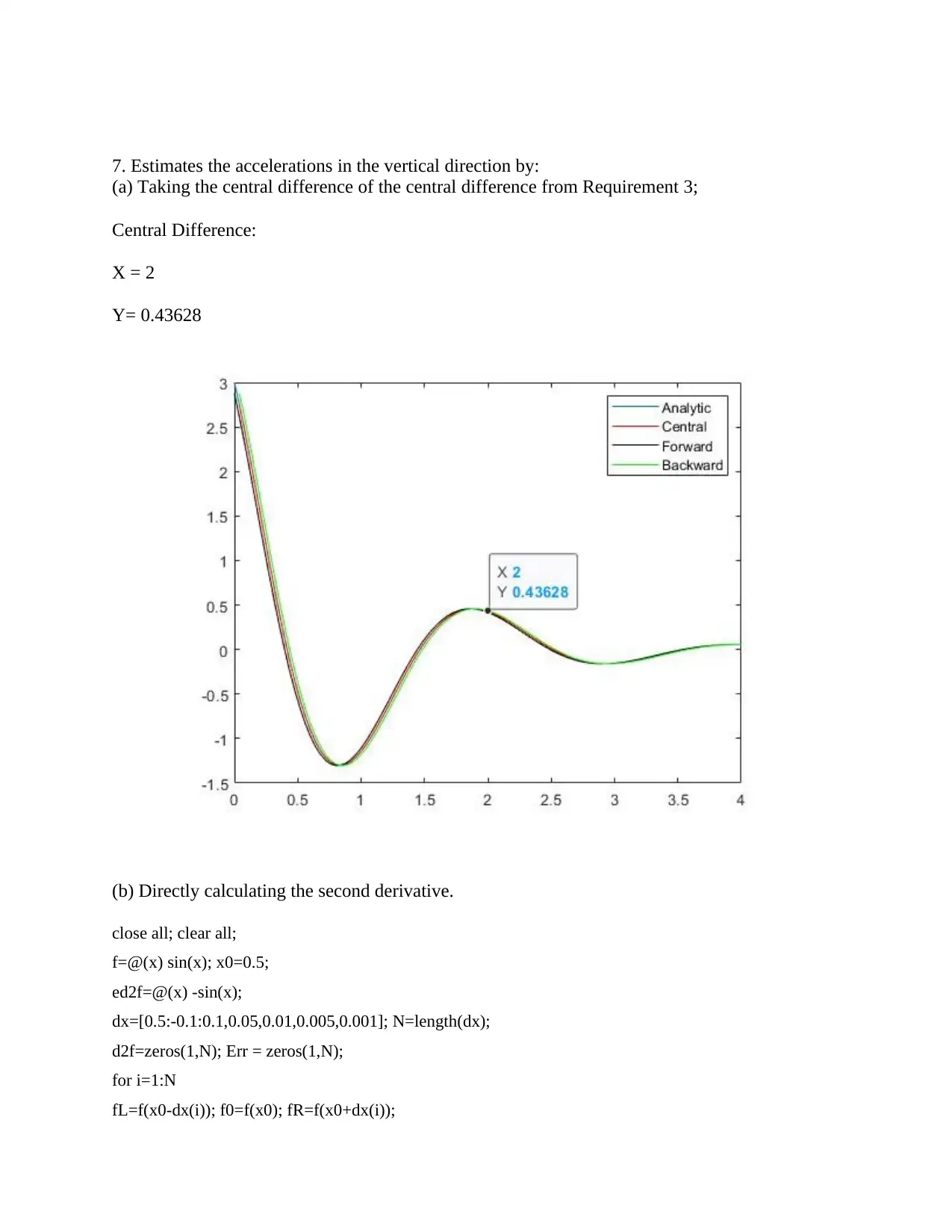
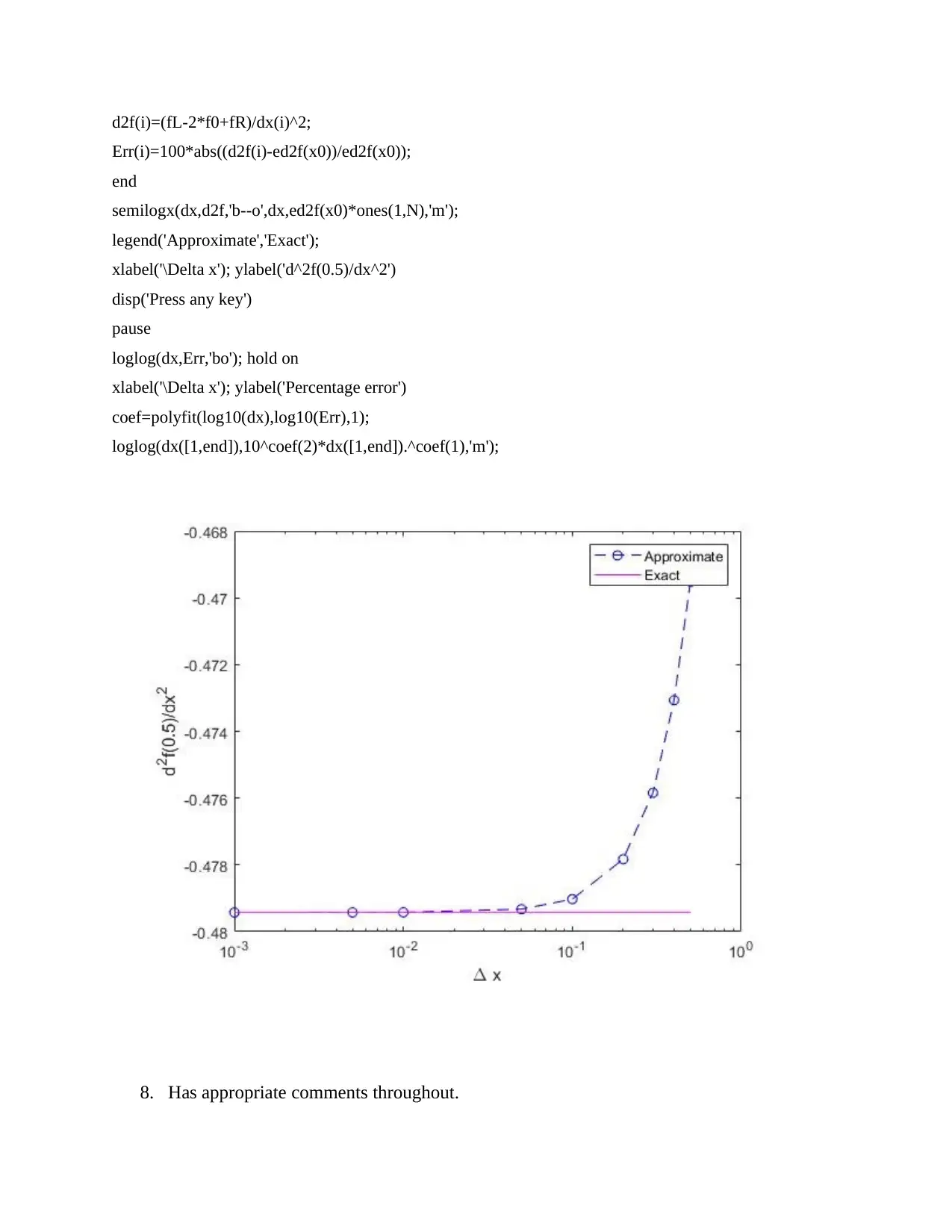
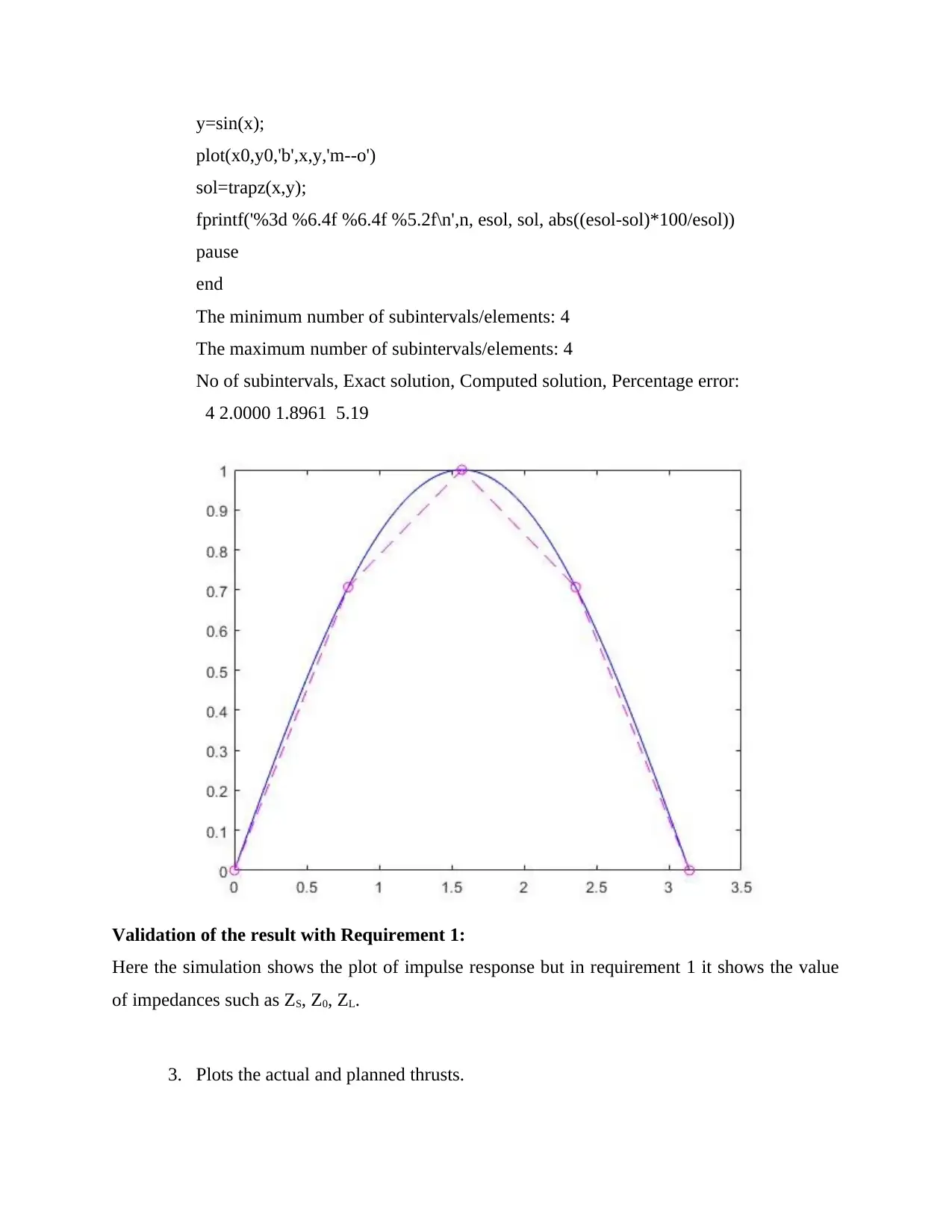
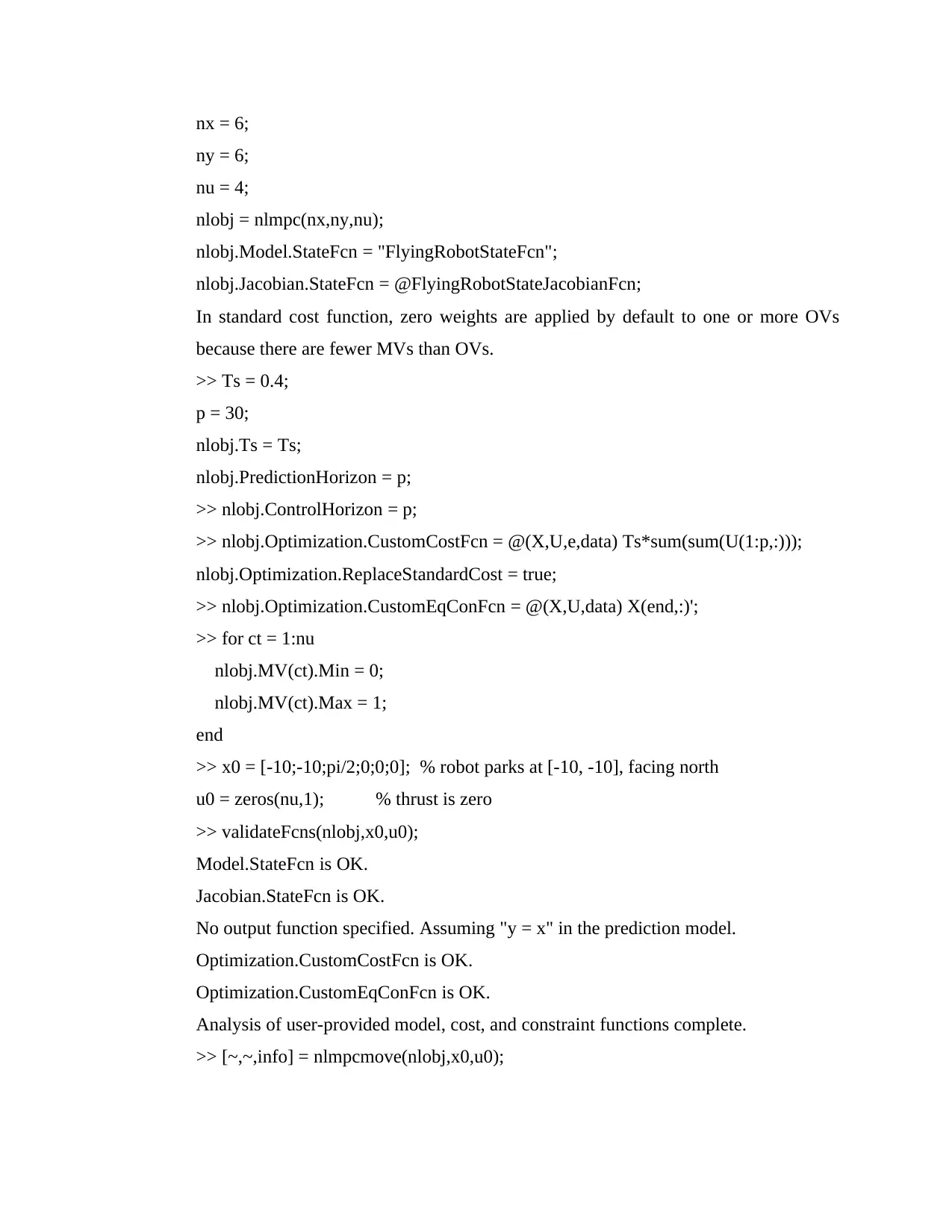
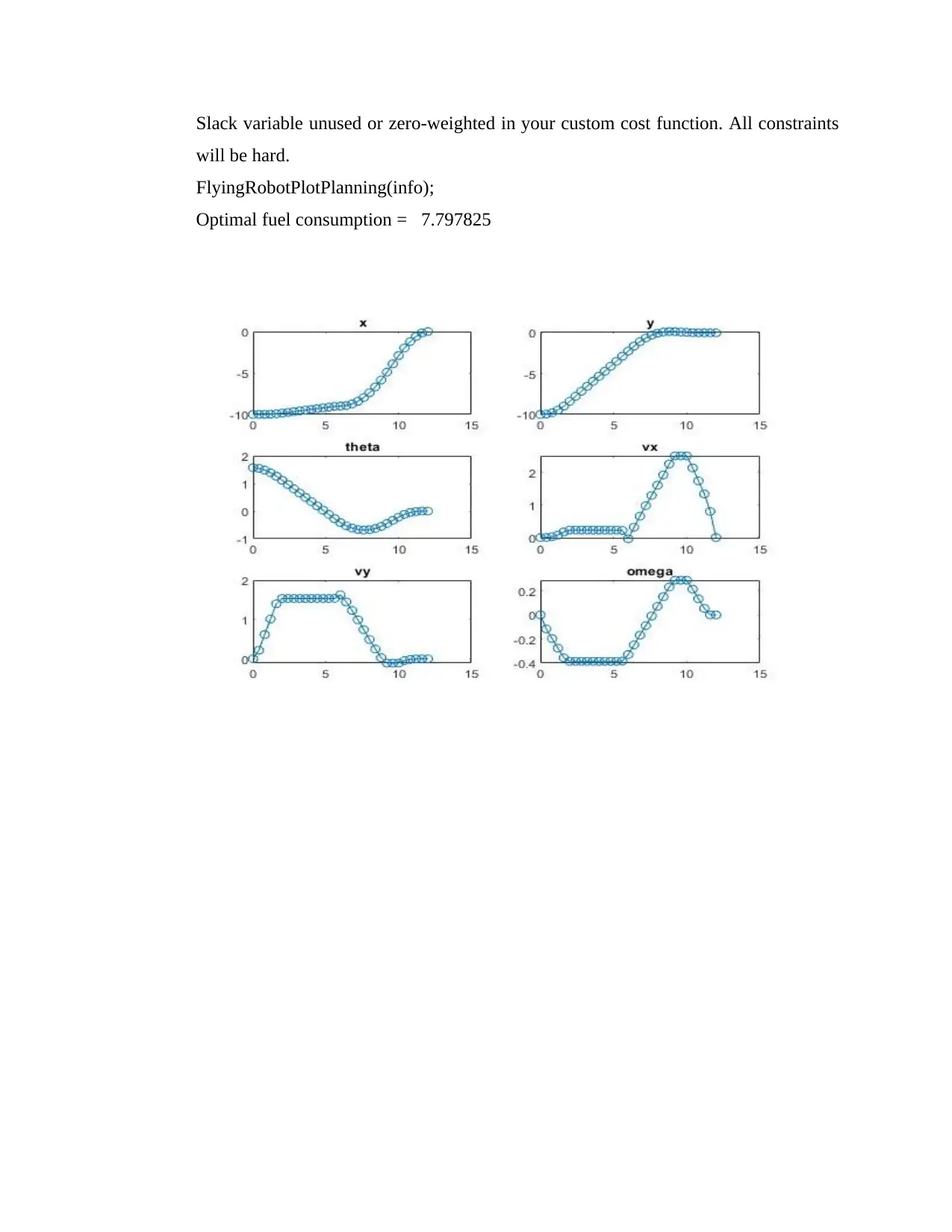
This assignment for ENG3104, Engineering Simulations and Computations, delves into numerical methods and their application in engineering contexts. The assignment requires students to estimate the value of dh/dt using backward, forward, and central differences, analyze the results, and determine the best method. It further involves estimating accelerations, finding the actual total impulse analytically using the trapezoidal method, and validating the results. Students are tasked with plotting results, conducting mesh-independence studies, and comparing planned versus actual fuel consumption in a simulation. The provided solution demonstrates the application of these methods using MATLAB, including code snippets, plots, and detailed explanations of each step. The assignment covers a wide range of numerical techniques essential for engineering analysis and simulation.
1 out of 23

Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.