University Project: Transient Response of 1 DoF System Analysis
VerifiedAdded on 2023/06/11
|19
|5903
|331
Homework Assignment
AI Summary
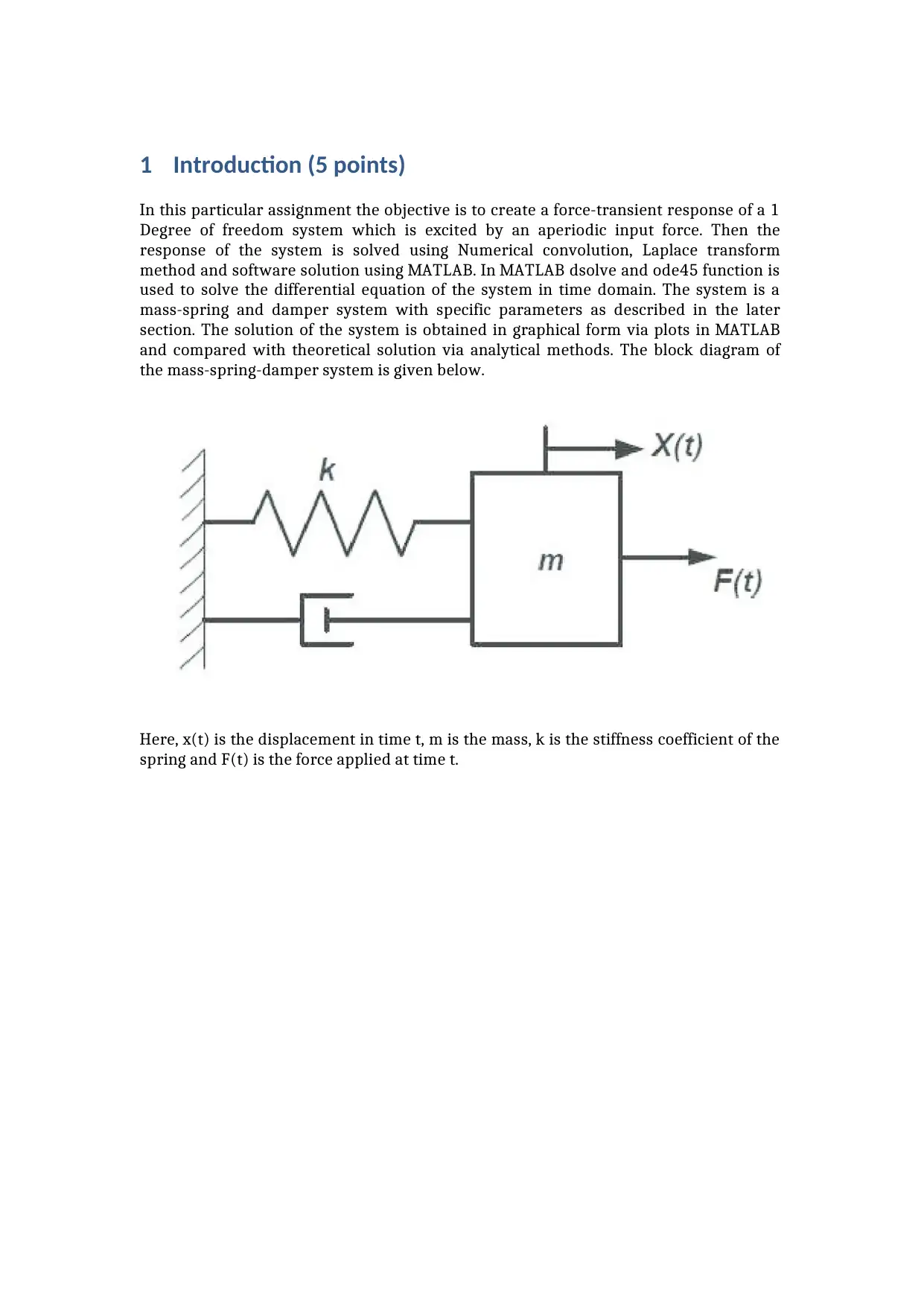
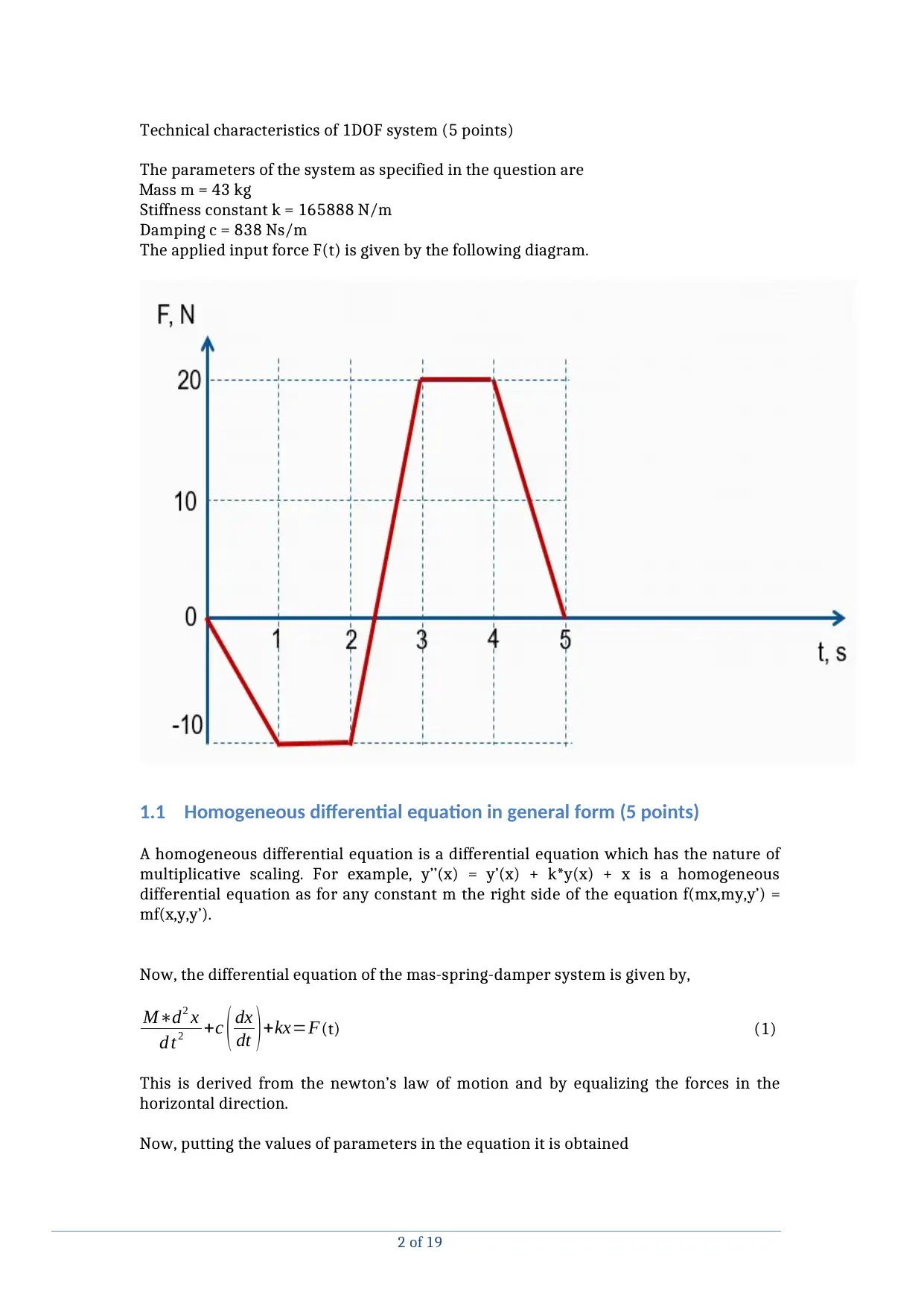
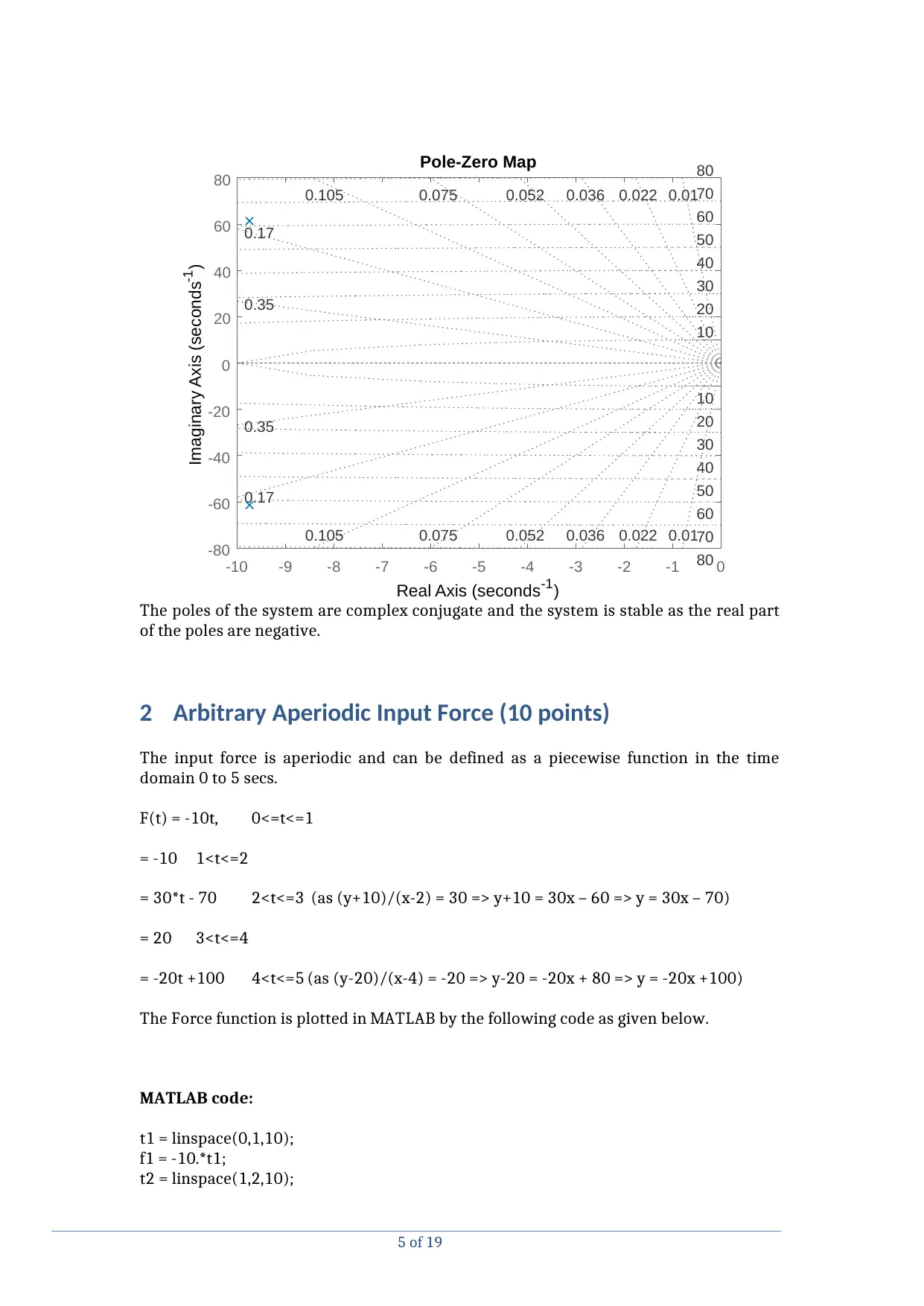
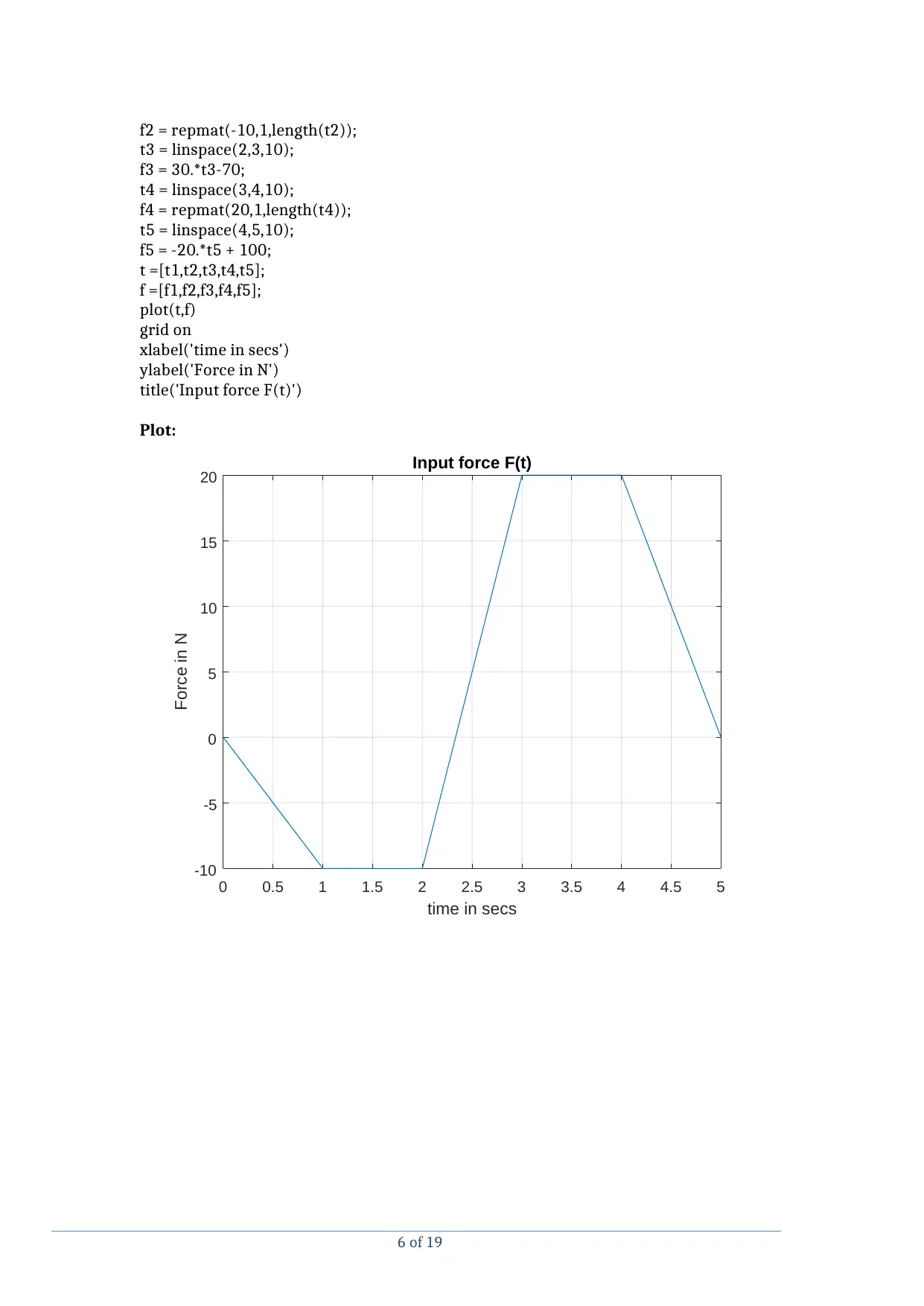
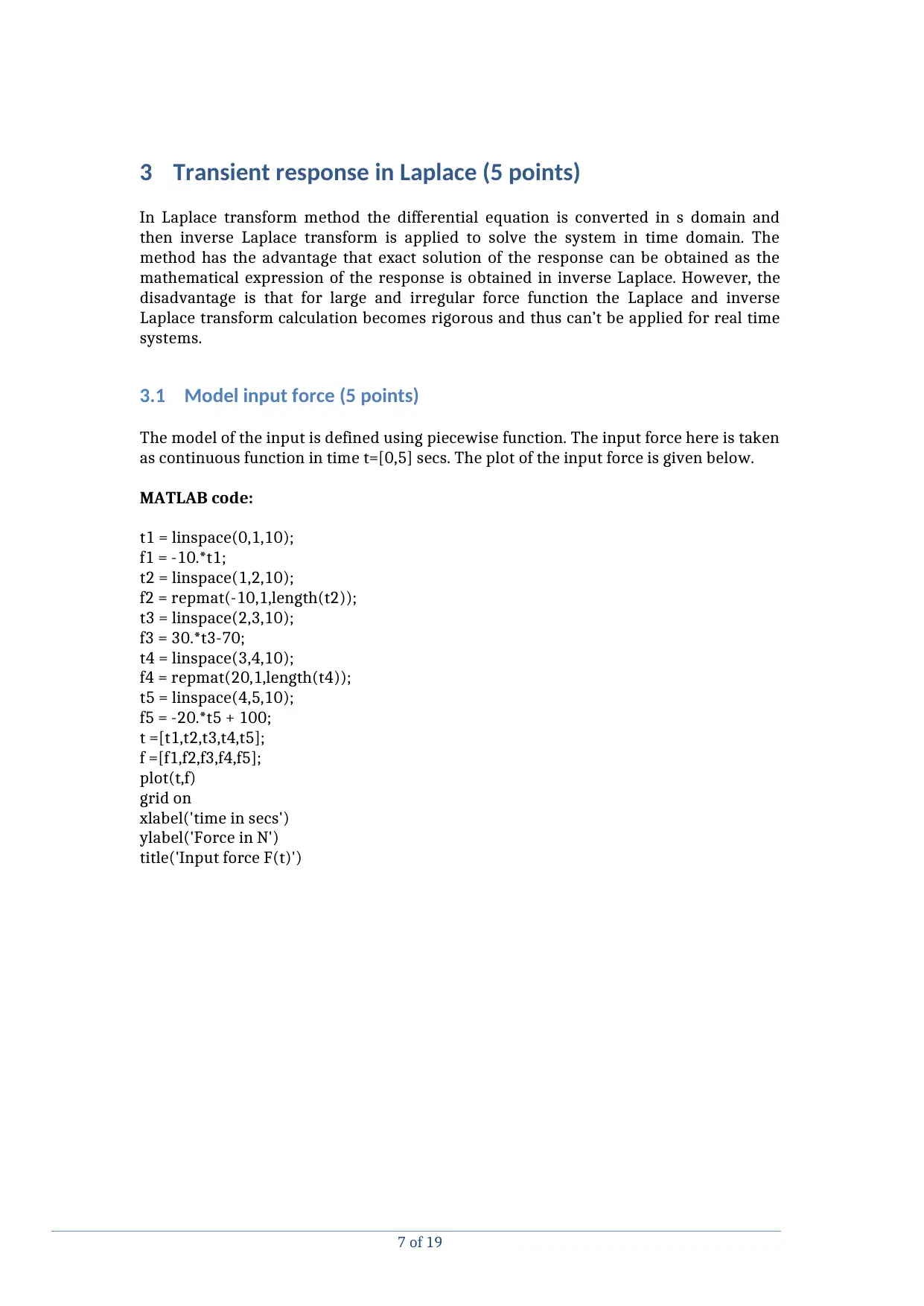
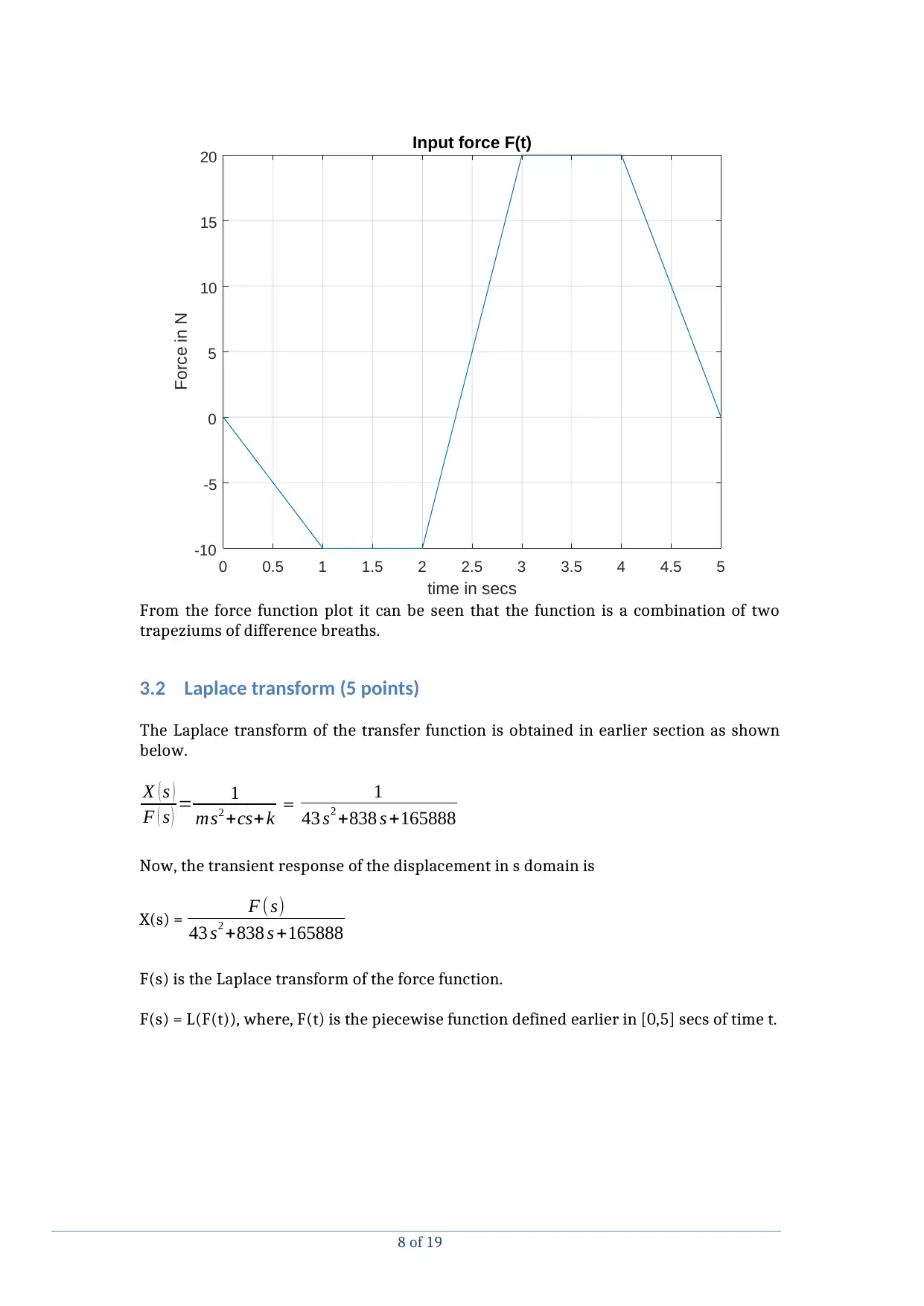
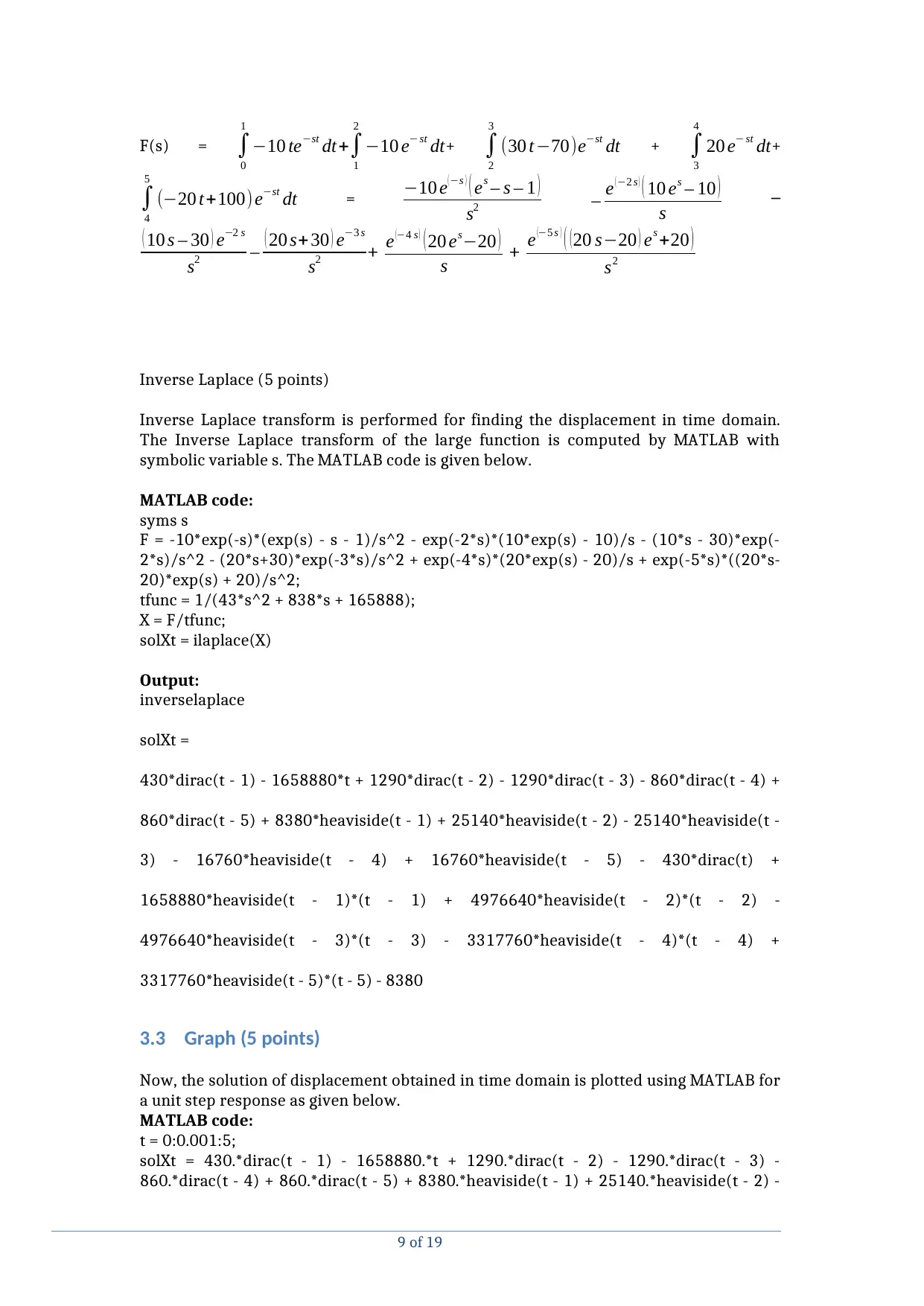
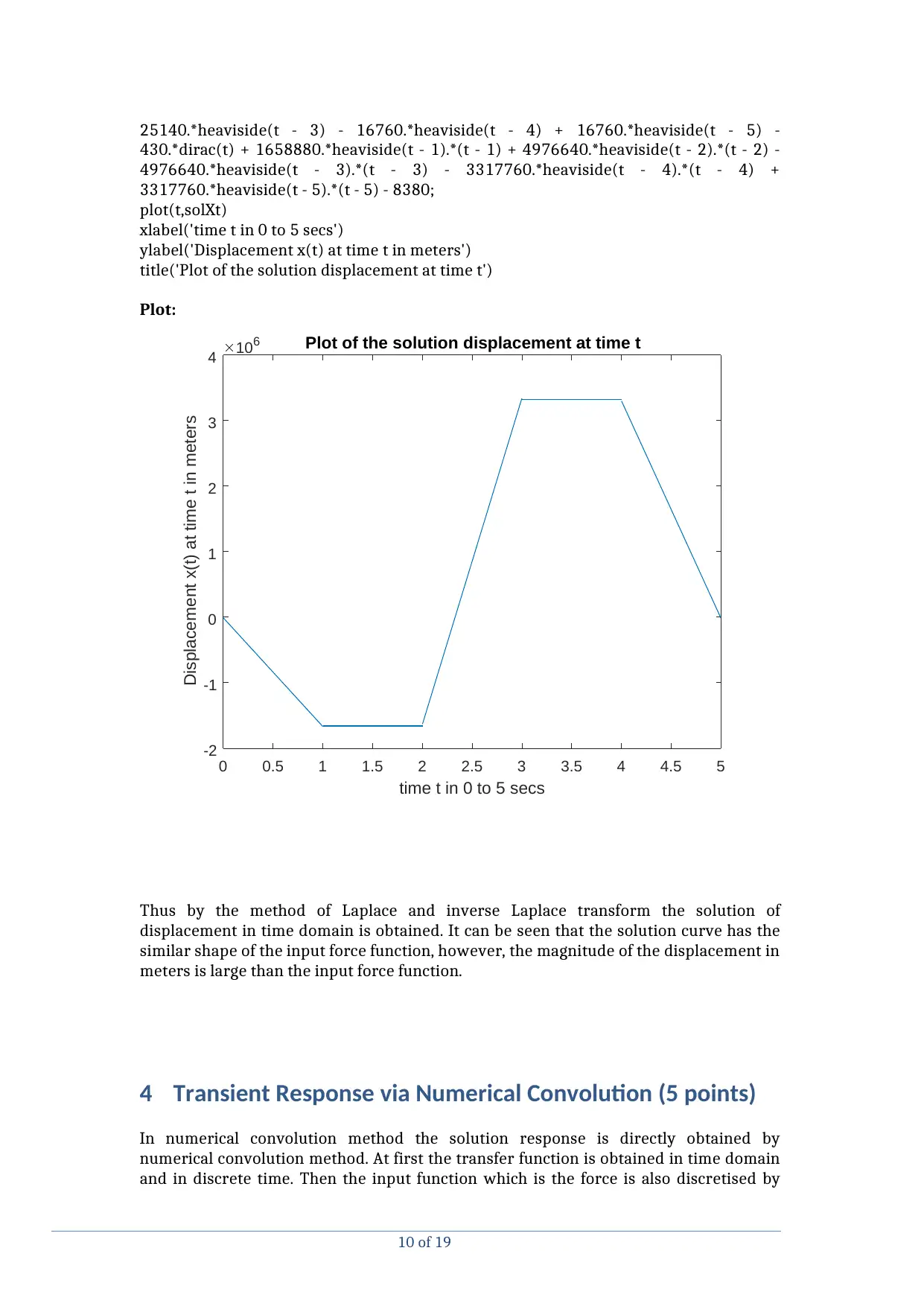
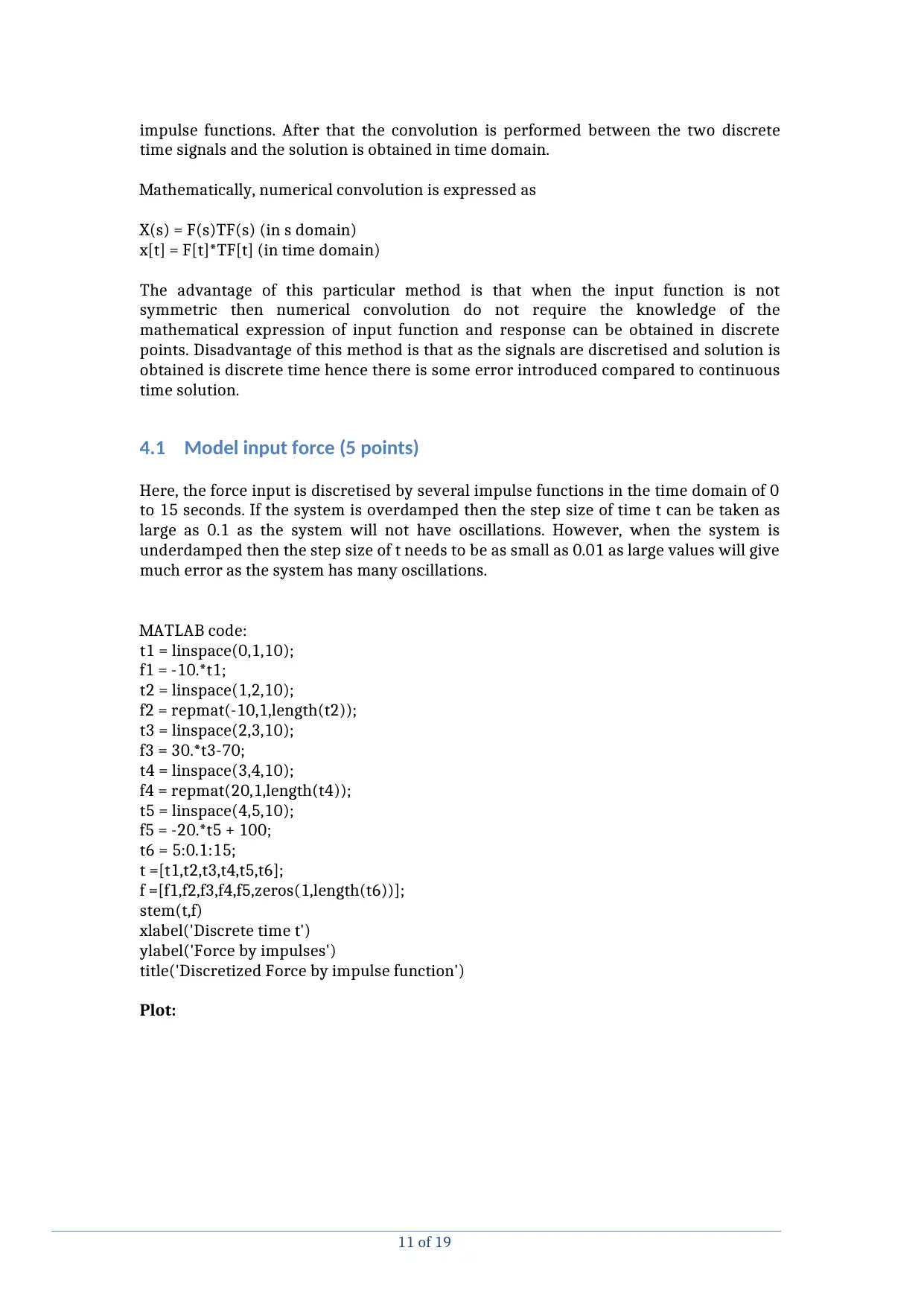
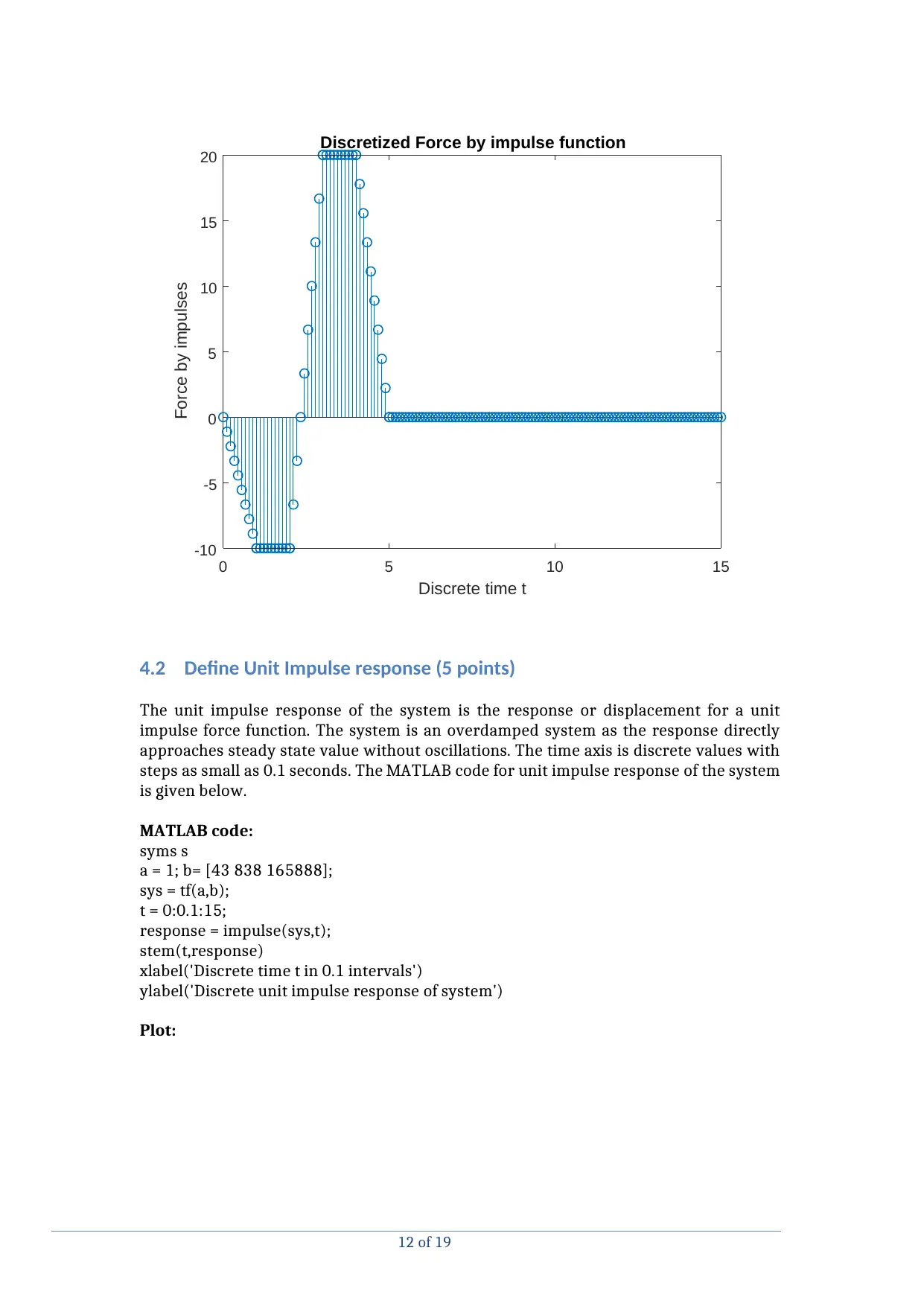
This assignment analyzes the forced transient response of a 1 Degree of Freedom (1 DoF) system subjected to an aperiodic input force. The solution begins by establishing the homogeneous differential equation of the mass-spring-damper system and determining its natural frequency, damping ratio, and damped frequency. The transfer function is defined, and a pole-zero plot is generated to analyze system stability. The aperiodic input force is then defined, and the transient response is solved using three methods: Laplace transform, numerical convolution, and MATLAB. The Laplace transform method involves transforming the differential equation into the s-domain, solving for the displacement, and performing an inverse Laplace transform to obtain the time-domain solution. The numerical convolution method calculates the response directly in the time domain by convolving the system's impulse response with the input force. Finally, MATLAB is used to solve the differential equation using dsolve and ode45 functions, providing a graphical representation of the system's response. The assignment compares the results obtained from these different methods. The assignment also includes MATLAB codes and plots to visualize the input force and the system's displacement response.

1 out of 19
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2025 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.