BAN402 Linear Programming Project: Production & Resource Optimization
VerifiedAdded on 2023/06/04
|13
|2669
|243
Project
AI Summary
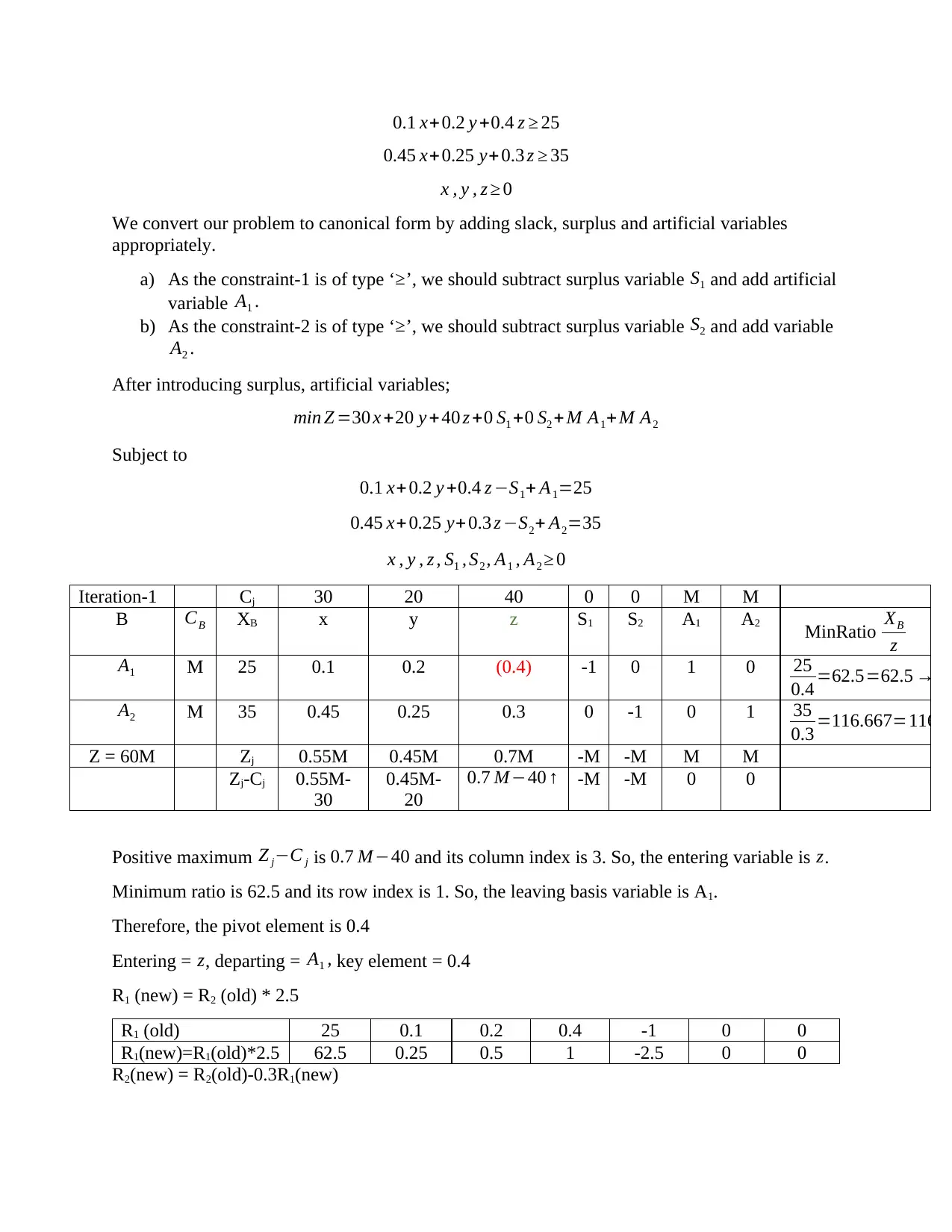
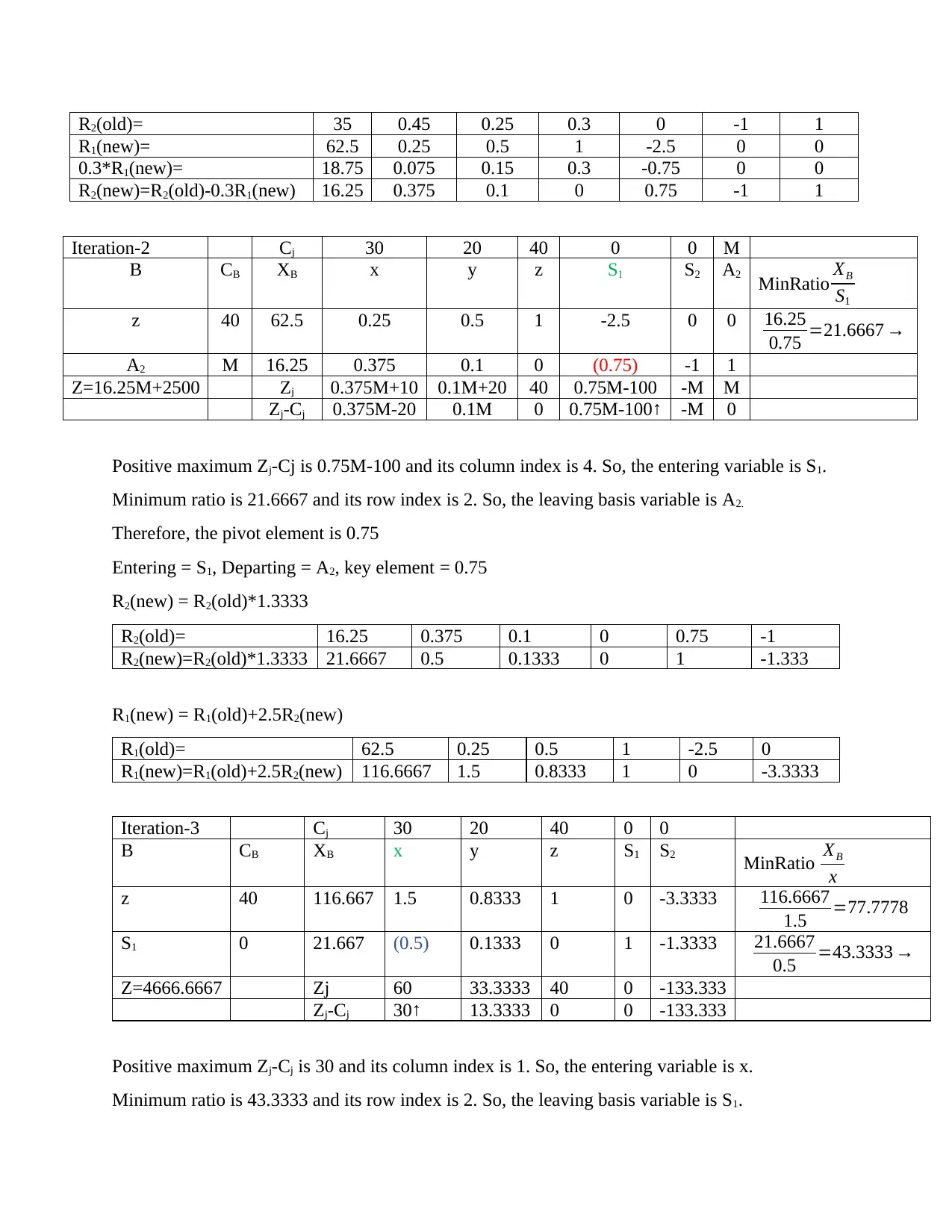
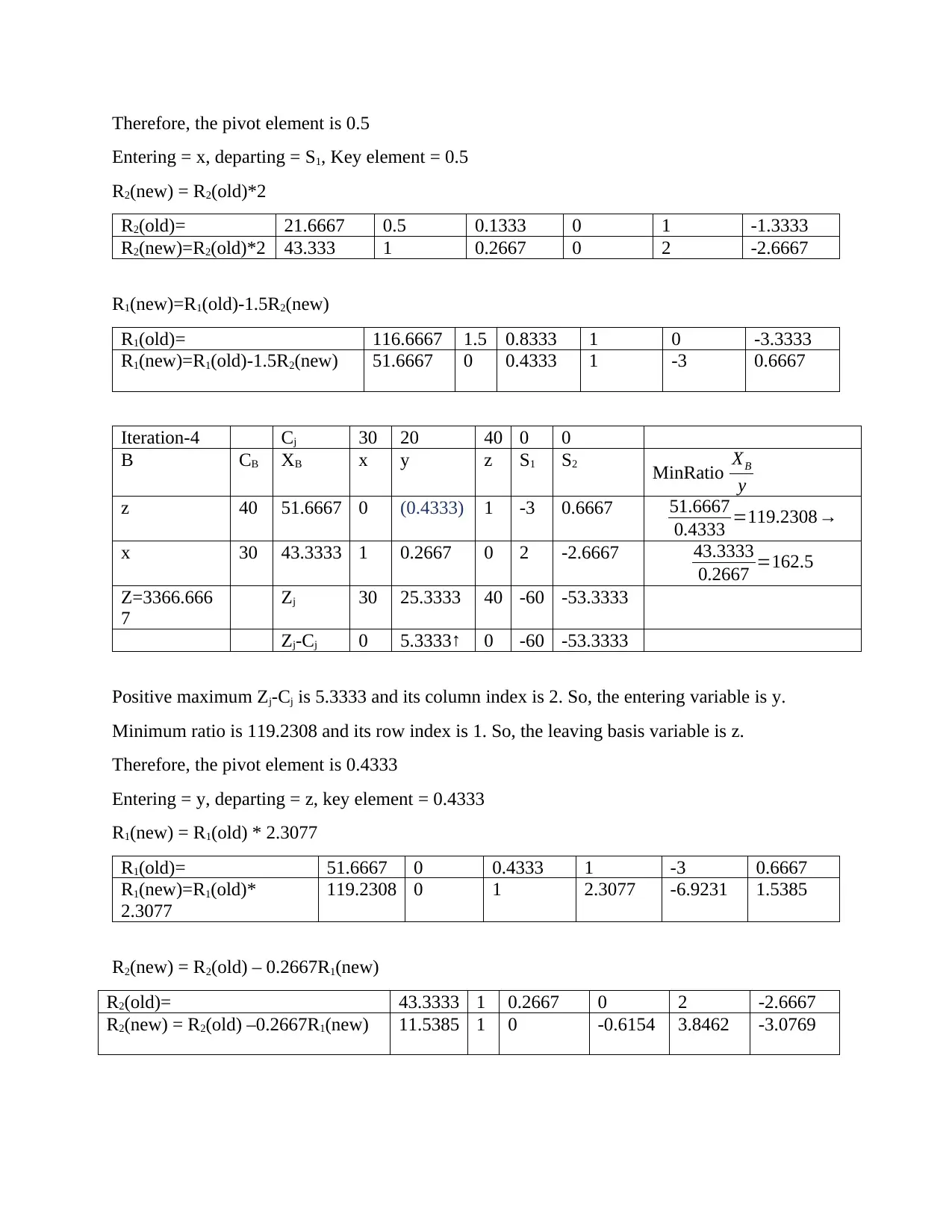
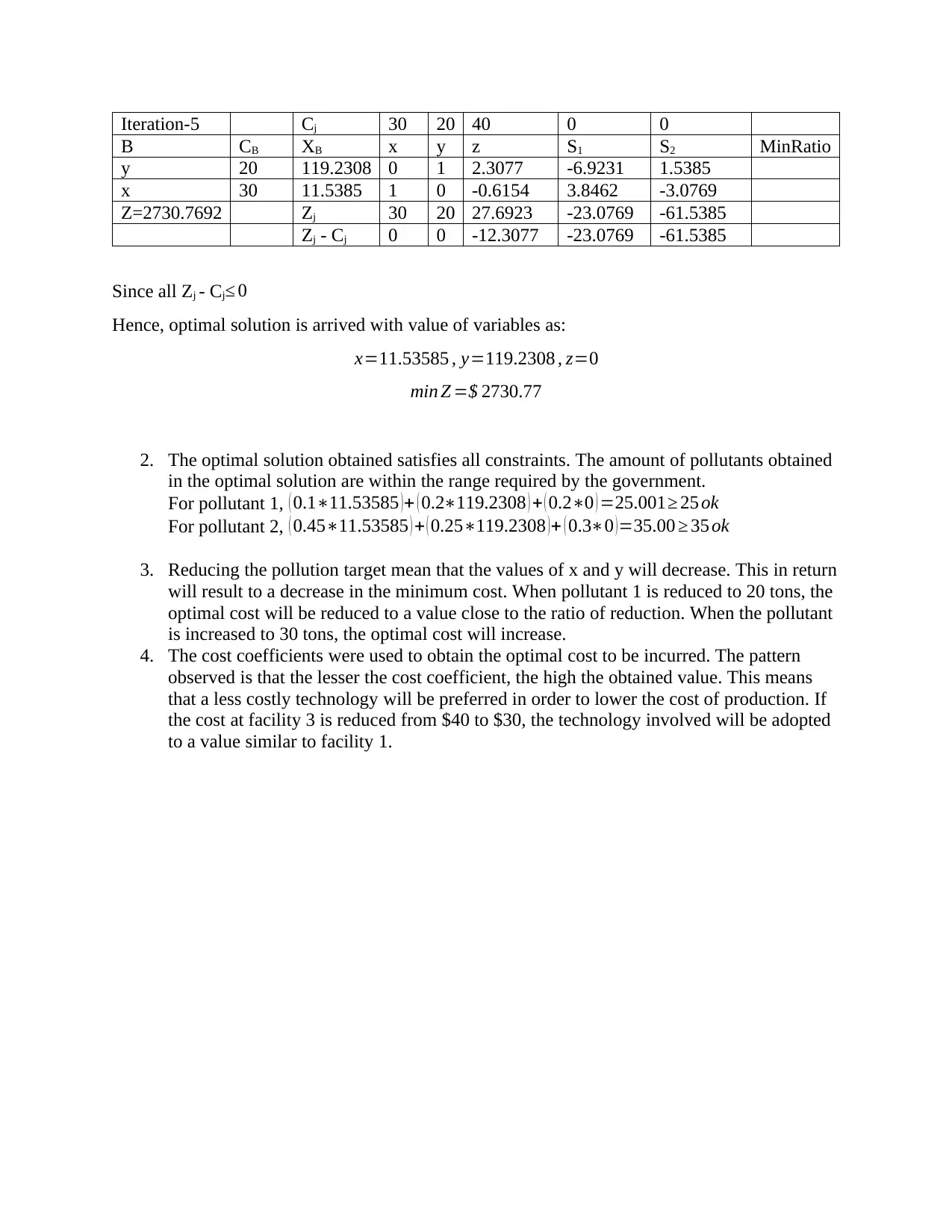
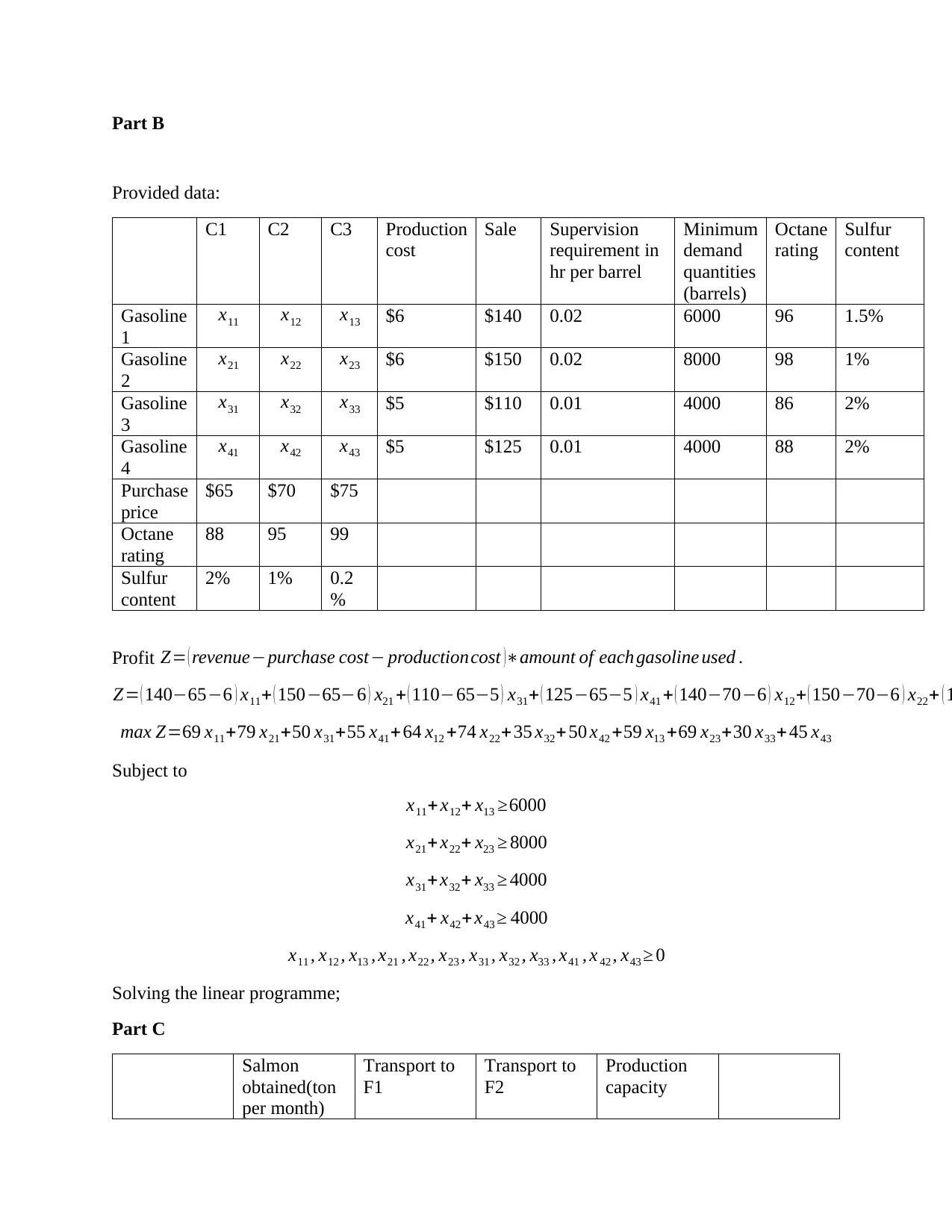
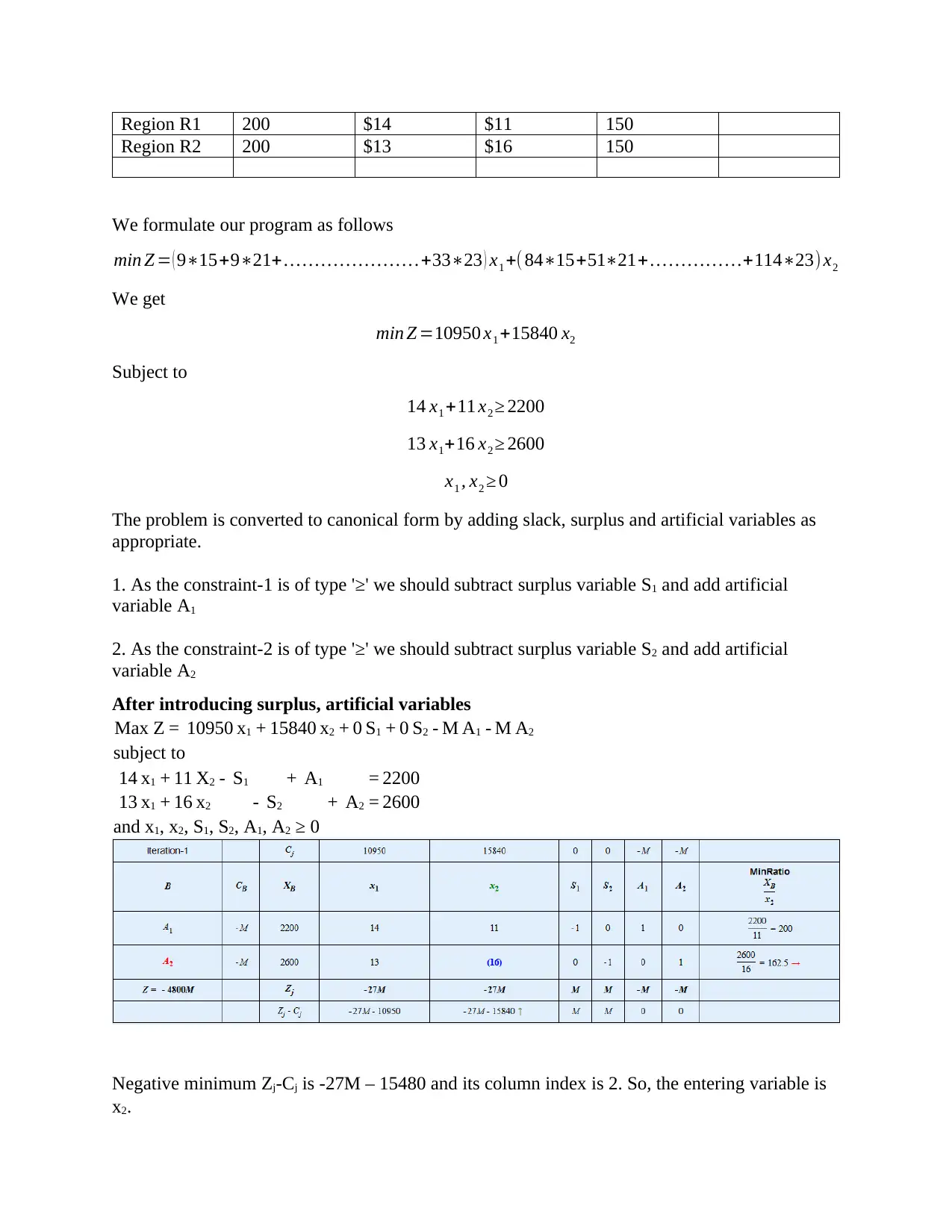
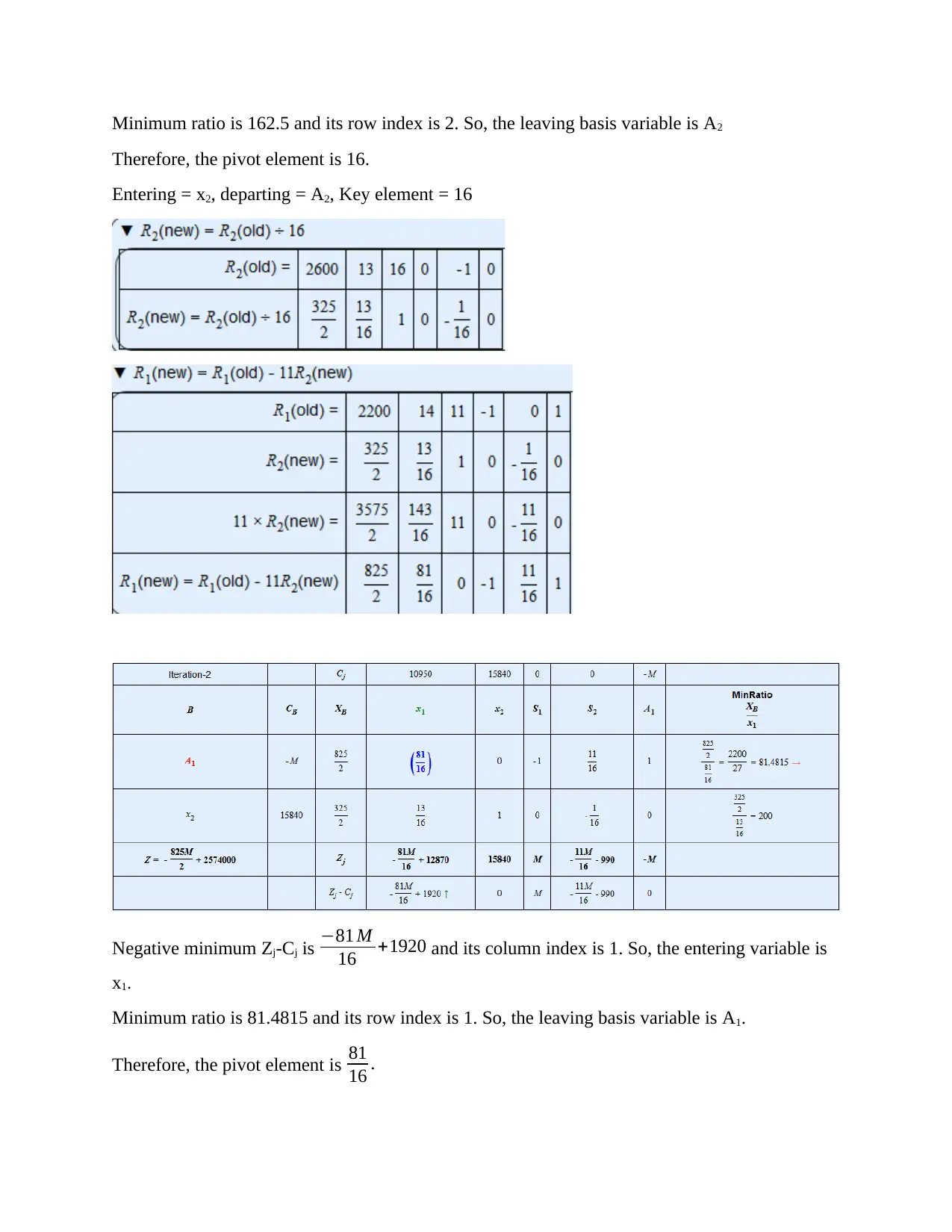
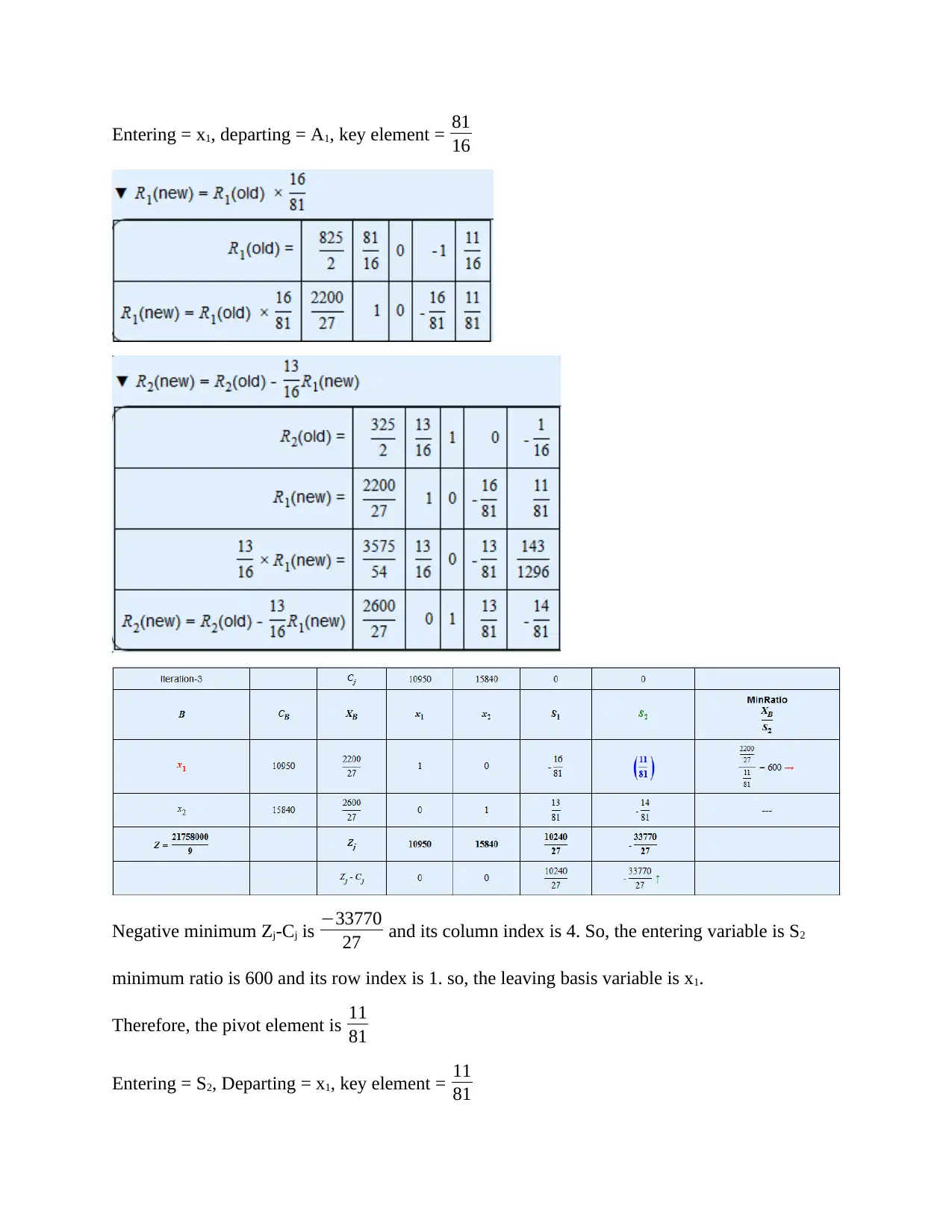
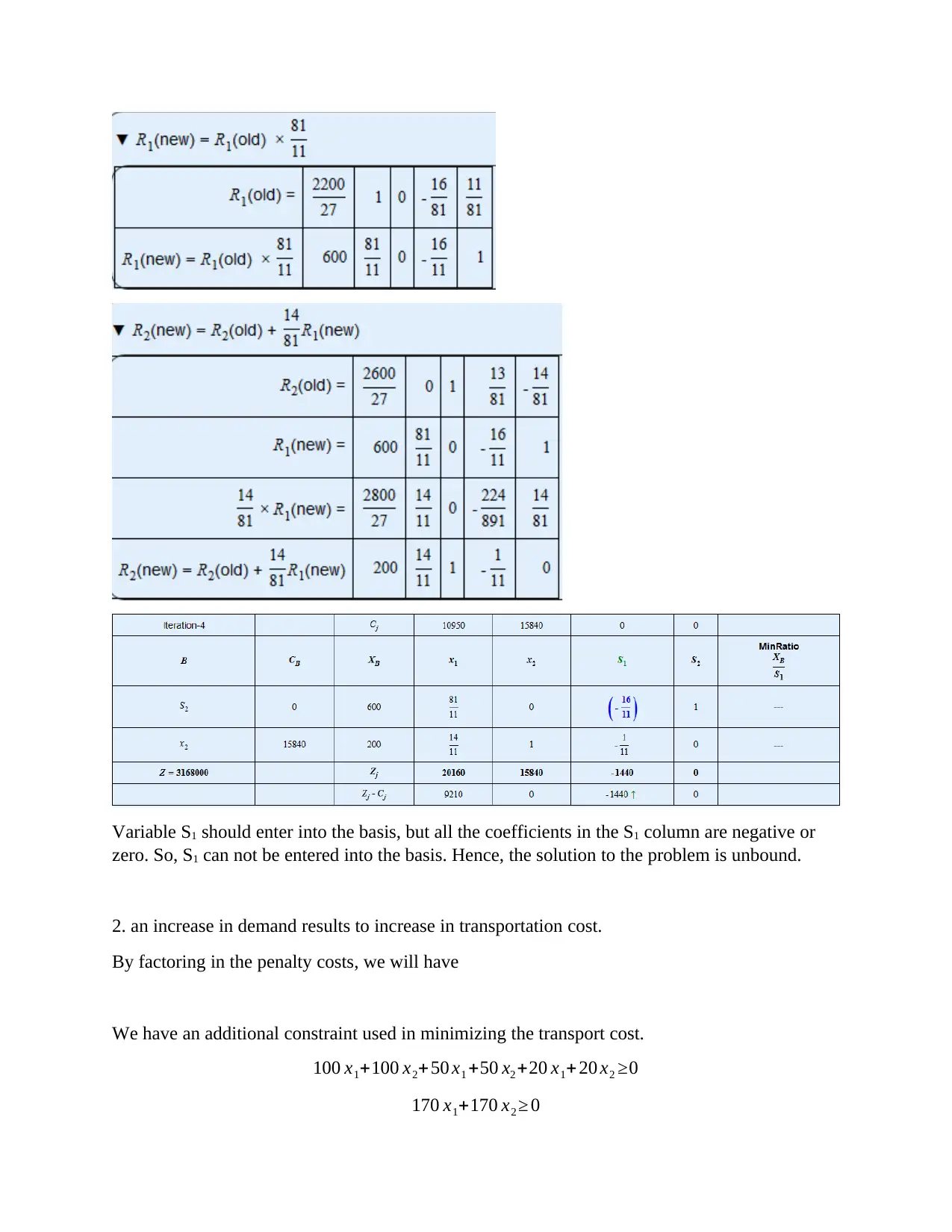
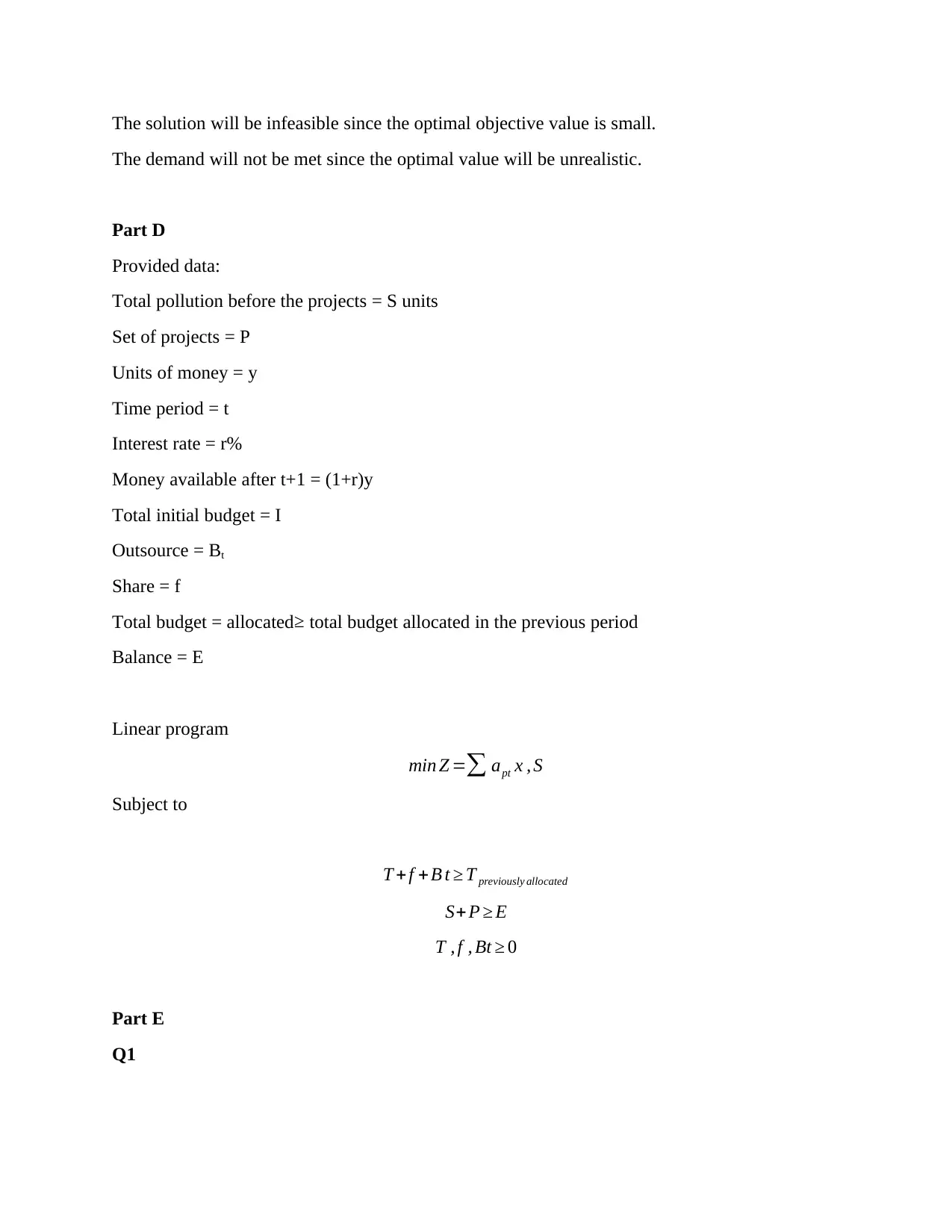
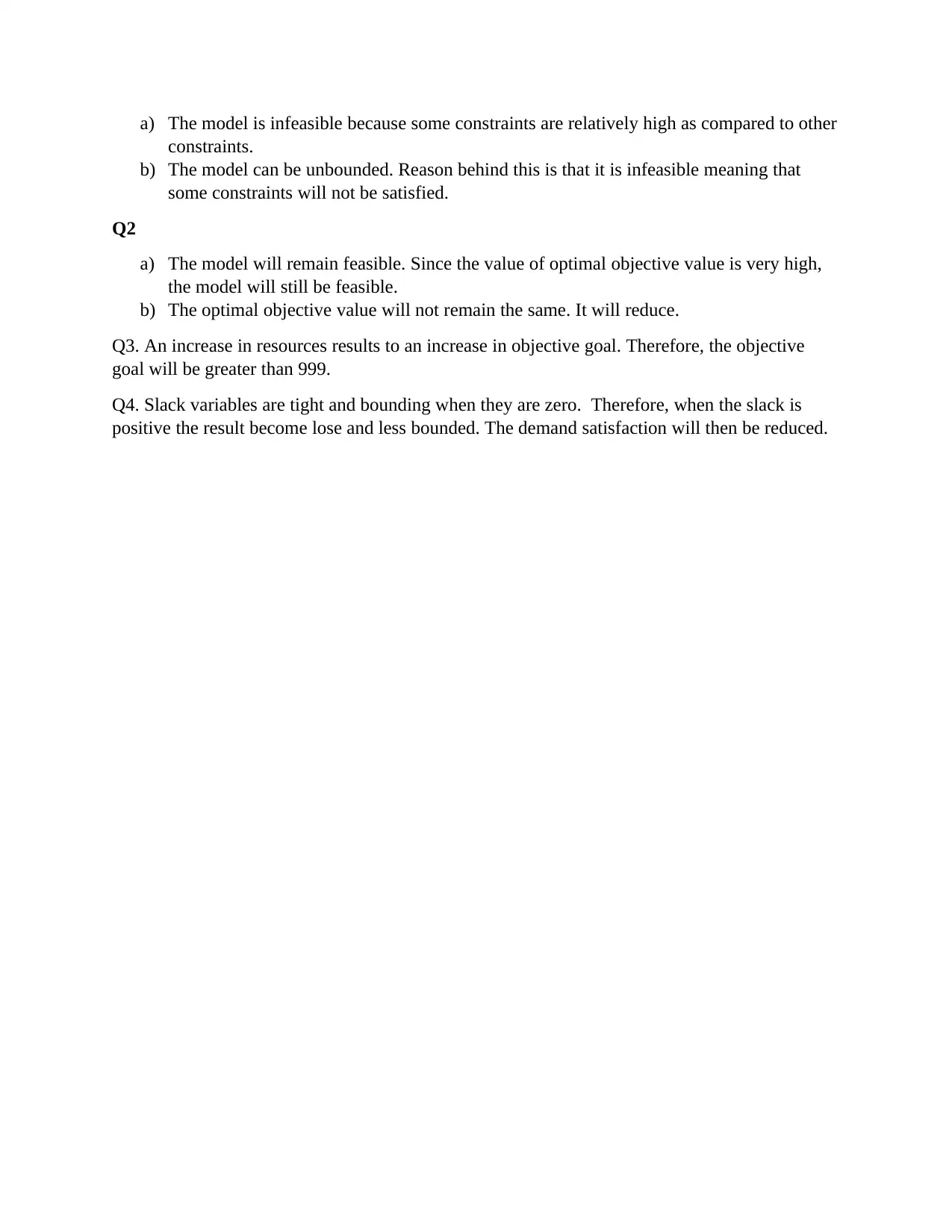
This document presents a solved Linear Programming project, likely completed for a course such as BAN402. The project addresses optimization problems across three distinct scenarios (Parts A, B, and C), involving production facility upgrades to minimize pollution costs, gasoline production optimization based on sales costs and octane/sulfur content, and salmon transportation optimization with production capacity considerations. Each part involves formulating linear programming models, converting them to canonical form, and solving them using techniques like introducing slack, surplus, and artificial variables. The solutions provide insights into optimal resource allocation, cost minimization, and the impact of changing constraints or parameters on the overall outcome. Part D also explores a linear program for pollution reduction projects. Desklib provides a platform for students to access solved assignments and past papers, aiding in their understanding and learning process.

1 out of 13
Related Documents




Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2025 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.