Wind Turbine Gearbox Design Project Report - Mechanical Engineering
VerifiedAdded on 2023/05/30
|10
|1907
|128
Report
AI Summary
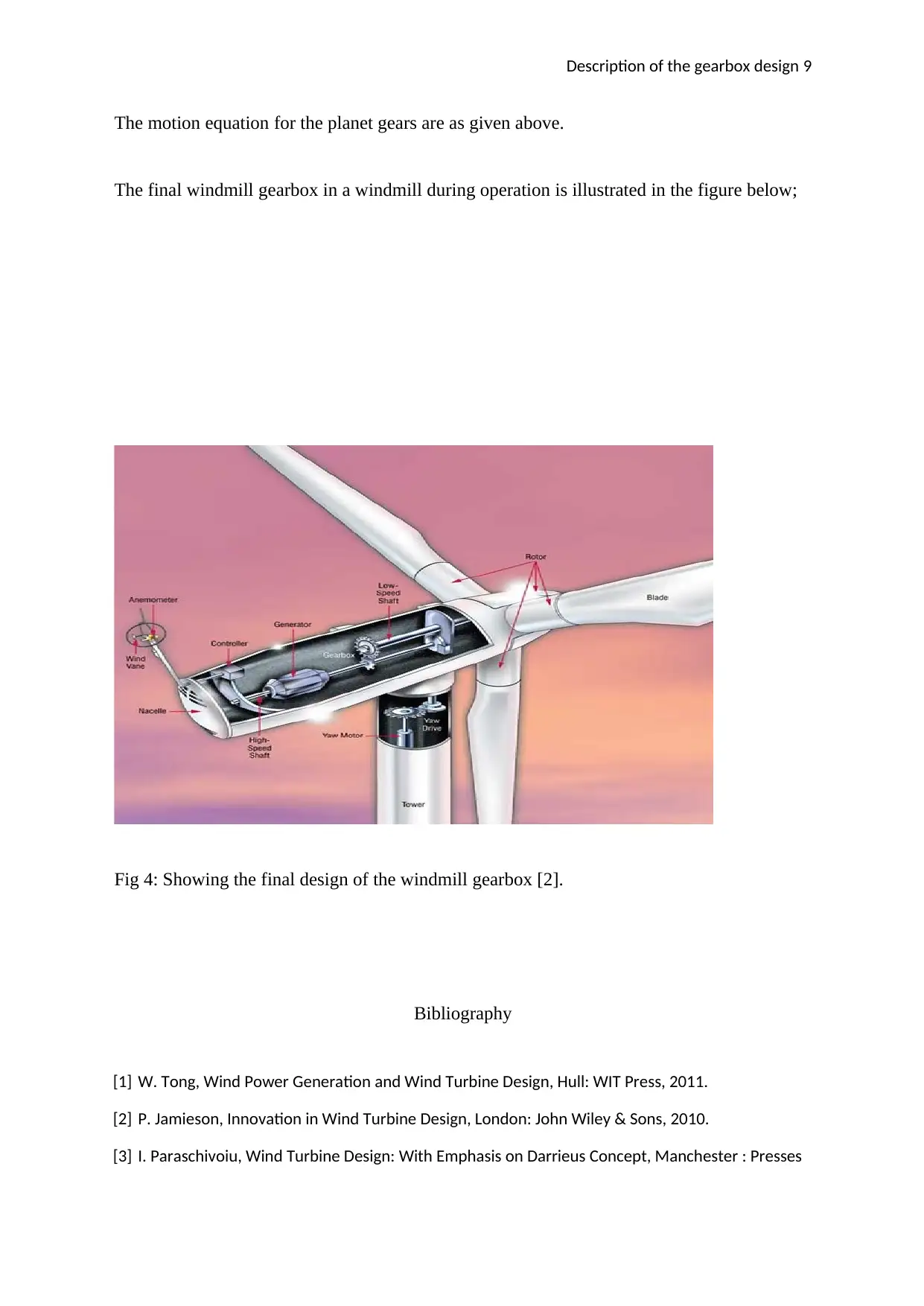
This report presents a comprehensive analysis of a wind turbine gearbox design project, focusing on the mechanical engineering aspects. It begins with an introduction to wind turbine technology and the critical role of the gearbox in converting wind energy into electricity. The report details the design specifications, including gear configuration, shaft design, and the components involved in the gearbox. It explores the use of a compound epicyclical gear configuration with three planetary gears meshing with a central sun gear, detailing torque calculations and the significance of shaft design using steel for its strength and corrosion resistance. The report includes diagrams illustrating the gearbox and its components, emphasizing the importance of gearbox specifications for optimizing wind turbine performance and minimizing maintenance costs. It further describes the components and structures of the gearbox, including the planetary and parallel gear stages, and the dynamic responses of the components. The report also provides equations used to calculate relative displacements and mesh forces within the gearbox, considering factors like backlash and errors in static transmission. Newton's law is applied to derive motion equations for the planet carrier, sun pinions, and planet gears. The report concludes with a final design illustration and a bibliography of relevant resources.


1 out of 10
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.