Technical Report: Exploring the Technology of Driverless Cars
VerifiedAdded on 2023/06/13
|15
|3965
|128
Report
AI Summary
This technical report provides an overview of driverless car technology, focusing on Google's driverless car as a prime example. It delves into the constituents of such vehicles, including hardware sensors, LIDAR, video cameras, position estimators, computers, and aerial systems, highlighting the crucial role of artificial intelligence in decision-making. The report discusses the potential benefits of driverless cars, such as reduced traffic jams and increased safety, while also addressing potential drawbacks. It emphasizes the future need for this technology and its potential to revolutionize transportation, improve traffic management, and reduce environmental impact. The report concludes by summarizing the key findings and underscoring the transformative potential of driverless car technology.

Running head: PROFESSIONAL ENGINEERING
PROFESSIONAL ENGINEERING
Name of the Student
Name of the University
Authors Note:
PROFESSIONAL ENGINEERING
Name of the Student
Name of the University
Authors Note:
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser

1PROFESSIONAL ENGINEERING
Table of Contents
Introduction..........................................................................................................................3
Discussion............................................................................................................................3
Google Driverless Car.....................................................................................................3
Constituents of Driverless Car.........................................................................................4
Hardware sensor..............................................................................................................4
LIDAR.........................................................................................................................4
Video camera...............................................................................................................5
Position estimator........................................................................................................5
Computer.....................................................................................................................6
Aerial...........................................................................................................................6
Artificial Intelligence...................................................................................................6
Other technologies.......................................................................................................6
Working of Google Car...................................................................................................8
End of traffic Jams...........................................................................................................9
Need of Driverless car in future.......................................................................................9
Benefits of Driverless Car.............................................................................................10
Drawbacks of Driverless Car.........................................................................................11
Conclusion.........................................................................................................................11
References..........................................................................................................................12
Table of Contents
Introduction..........................................................................................................................3
Discussion............................................................................................................................3
Google Driverless Car.....................................................................................................3
Constituents of Driverless Car.........................................................................................4
Hardware sensor..............................................................................................................4
LIDAR.........................................................................................................................4
Video camera...............................................................................................................5
Position estimator........................................................................................................5
Computer.....................................................................................................................6
Aerial...........................................................................................................................6
Artificial Intelligence...................................................................................................6
Other technologies.......................................................................................................6
Working of Google Car...................................................................................................8
End of traffic Jams...........................................................................................................9
Need of Driverless car in future.......................................................................................9
Benefits of Driverless Car.............................................................................................10
Drawbacks of Driverless Car.........................................................................................11
Conclusion.........................................................................................................................11
References..........................................................................................................................12
2PROFESSIONAL ENGINEERING
Introduction
Driverless car can be considered as one of greatest innovation in 21st century. Having a
revolutionary transport sector will ultimately help in breakthrough, which will impact the life of
large number of individuals. Development of technology will help in triggering a series of in-
depth changes in various transport sector (Richtel and Dougherty, 2015). The changes can be
encountered from a series of passenger services ranging from operation to maintenance. This has
ultimately provided a list of changes in various automobile and transport sectors. Mobile tools
and application claims to provide various kinds of strategies which are known to be existing
model. Apart from new kind of technologies which have great impact on technology it set focus
to take technology to new level. Now a day’s vehicles are becoming autonomous in nature and
are connected wirelessly to each other (Claudel and Ratti, 2015). Daniel corporation should take
initiatives to implement driverless car technology in their organization as it can bring a lot
benefits to their organization. Some of the example of organization manufacturing driverless car
technology are Google and Tesla.
In the coming pages of the report an idea has been provided regarding google driverless
car. Google driverless can be considered as a best example for understanding the need of
driverless car in Daniel corporation. The constitutes of the car that is hardware sensor, Lidar,
video camera, position estimation, computers have been discussed in the report. After that
artificial intelligence and need of driverless car in future has been discussed in details.
Introduction
Driverless car can be considered as one of greatest innovation in 21st century. Having a
revolutionary transport sector will ultimately help in breakthrough, which will impact the life of
large number of individuals. Development of technology will help in triggering a series of in-
depth changes in various transport sector (Richtel and Dougherty, 2015). The changes can be
encountered from a series of passenger services ranging from operation to maintenance. This has
ultimately provided a list of changes in various automobile and transport sectors. Mobile tools
and application claims to provide various kinds of strategies which are known to be existing
model. Apart from new kind of technologies which have great impact on technology it set focus
to take technology to new level. Now a day’s vehicles are becoming autonomous in nature and
are connected wirelessly to each other (Claudel and Ratti, 2015). Daniel corporation should take
initiatives to implement driverless car technology in their organization as it can bring a lot
benefits to their organization. Some of the example of organization manufacturing driverless car
technology are Google and Tesla.
In the coming pages of the report an idea has been provided regarding google driverless
car. Google driverless can be considered as a best example for understanding the need of
driverless car in Daniel corporation. The constitutes of the car that is hardware sensor, Lidar,
video camera, position estimation, computers have been discussed in the report. After that
artificial intelligence and need of driverless car in future has been discussed in details.
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
3PROFESSIONAL ENGINEERING
Discussion
Google Driverless Car
A driverless car is designed in robotic vehicle which is designed in such a way that it can
easily fulfil the capabilities of transportation without the need of any human operator (Mitchell
and van der Lee, 2017). Various kinds of technologies which are used in driverless car are anti-
lock brakes (ABS), electronic stability control (ESC), self-parking and automated guided vehicle
system. In the near future it is expected that driverless car will change whole model of
transportation. Google driverless car is designed in such a way it can easily control steering
during looking for large number of obstacles (Cui, 2016). Correction regarding speed limit can
be done can be easily done by car itself. On any kind of traffic condition, it can go or stop itself.
Constituents of Driverless Car
Three are mainly three part of driverless car technology that is Google map, sensors and
lastly artificial intelligence (Levy, 2015). A driverless car is computerized car which has been
designed by Google. It does not have any kind of wheel for steering, accelerator it just comes up
with start stop, pullover and computer screen by which route can be easily tracked. Google map
and Google GPS are mainly used for navigation. Google map provides the car with the
information of road. It generally interacts with GPS and acts in similar way like database.
Hardware sensor
Real time and dynamic kind of environment are generally attained by this particular car.
For attaining sensors are needed for creation of environment which is fully observed (Broggi et
al. 2015). Different kind of hardware sensor like Lidar, position estimator, distance sensor and
aerial computers has been discussed below.
Discussion
Google Driverless Car
A driverless car is designed in robotic vehicle which is designed in such a way that it can
easily fulfil the capabilities of transportation without the need of any human operator (Mitchell
and van der Lee, 2017). Various kinds of technologies which are used in driverless car are anti-
lock brakes (ABS), electronic stability control (ESC), self-parking and automated guided vehicle
system. In the near future it is expected that driverless car will change whole model of
transportation. Google driverless car is designed in such a way it can easily control steering
during looking for large number of obstacles (Cui, 2016). Correction regarding speed limit can
be done can be easily done by car itself. On any kind of traffic condition, it can go or stop itself.
Constituents of Driverless Car
Three are mainly three part of driverless car technology that is Google map, sensors and
lastly artificial intelligence (Levy, 2015). A driverless car is computerized car which has been
designed by Google. It does not have any kind of wheel for steering, accelerator it just comes up
with start stop, pullover and computer screen by which route can be easily tracked. Google map
and Google GPS are mainly used for navigation. Google map provides the car with the
information of road. It generally interacts with GPS and acts in similar way like database.
Hardware sensor
Real time and dynamic kind of environment are generally attained by this particular car.
For attaining sensors are needed for creation of environment which is fully observed (Broggi et
al. 2015). Different kind of hardware sensor like Lidar, position estimator, distance sensor and
aerial computers has been discussed below.
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
4PROFESSIONAL ENGINEERING
LIDAR
Lidar stands for Light detection and Ranging is nothing but an optical remote sensing
technology. It is mainly used for measuring the distance of target with the help of light in form of
laser pulsed. Lidar is a laser range finder which known as heart of the system and is mounted on
the top of spoiler (Luo, Yan and Wood, 2017). A detail map of the environment is generated by
the device name device VELODYNE 64 beam laser. It consists of sensor which is designed in
such that it can detect any kind of obstacle and can be easily used for navigation. It has a
scanning tool which is considered for scanning at a range of 60 meters (Babu et al. 2017). For
various kinds of 3D mobile and data collection and mapping collection this sensor is considered
to be best. It is considered to be best because of its durability, high rate data and also comes up
with 360-degree view. One piece of design makes use of 64 lasers which is fixed and mounted to
some kind of vertical angle. It is used for measuring the environment of the surrounding. Various
maps of high resolution are combined by car laser measurement unit. It is used in different kind
of car models which allow driving car on itself. It focusses on avoiding of obstacle and also
represent various kinds of traffic laws (Yigitcanlar, Currie and Kamruzzaman, 2017). A LIDAR
is well known instrument which consist of various kinds of things like laser, scanner and special
kind of GPS. For measuring the distance, the light reflected by the surface is measured by the
help of sensor.
Video camera
Sensor is a well-known equipment which is placed near rear view mirror. It helps in
detection of upcoming traffic light (Poczter and Jankovic, 2014). It performs the same kind of
functionality and is much interest in mildly interest traffic. It mainly reads various kinds of sign
and also keep an eye for various cyclist and motorists.
LIDAR
Lidar stands for Light detection and Ranging is nothing but an optical remote sensing
technology. It is mainly used for measuring the distance of target with the help of light in form of
laser pulsed. Lidar is a laser range finder which known as heart of the system and is mounted on
the top of spoiler (Luo, Yan and Wood, 2017). A detail map of the environment is generated by
the device name device VELODYNE 64 beam laser. It consists of sensor which is designed in
such that it can detect any kind of obstacle and can be easily used for navigation. It has a
scanning tool which is considered for scanning at a range of 60 meters (Babu et al. 2017). For
various kinds of 3D mobile and data collection and mapping collection this sensor is considered
to be best. It is considered to be best because of its durability, high rate data and also comes up
with 360-degree view. One piece of design makes use of 64 lasers which is fixed and mounted to
some kind of vertical angle. It is used for measuring the environment of the surrounding. Various
maps of high resolution are combined by car laser measurement unit. It is used in different kind
of car models which allow driving car on itself. It focusses on avoiding of obstacle and also
represent various kinds of traffic laws (Yigitcanlar, Currie and Kamruzzaman, 2017). A LIDAR
is well known instrument which consist of various kinds of things like laser, scanner and special
kind of GPS. For measuring the distance, the light reflected by the surface is measured by the
help of sensor.
Video camera
Sensor is a well-known equipment which is placed near rear view mirror. It helps in
detection of upcoming traffic light (Poczter and Jankovic, 2014). It performs the same kind of
functionality and is much interest in mildly interest traffic. It mainly reads various kinds of sign
and also keep an eye for various cyclist and motorists.
5PROFESSIONAL ENGINEERING
Position estimator
An ultrasonic sensor is also known as wheel encoder. It is generally placed on rear wheel
of the vehicle. It helps in understanding the location and keeping tracks of various kinds of
movements. By making use of this information of moving vehicle is automatically updated.
Computer
The central part of the car holds all kind of information and this fed from various kinds of
sensors for analyzing data (Aversa and Haefliger, 2016). In it steering, acceleration and brakes
are adjusted as per the need. Computer needs to have basic idea regarding the law along with
unsaid assumption of road.
Aerial
Aerial is known to be accurate positioning data which is used by self-driving car. Various
readings from the car instruments like gyroscope are generally combined with various kinds of
information which is received by GPS satellite. It helps in analyzing the actual position of the
car.
Artificial Intelligence
Artificial intelligence helps the autonomous car with various kinds of decision based on
real time decisions. Data which is obtained from various kinds of hardware sensors and google
map are generally sent to Artificial intelligence for understanding acceleration (Williams, 2016).
The ultimate aim of artificial intelligence is the safety of passengers and lastly destination.
Other technologies
Progress of driverless car technology is being made at various kinds of levels like
Position estimator
An ultrasonic sensor is also known as wheel encoder. It is generally placed on rear wheel
of the vehicle. It helps in understanding the location and keeping tracks of various kinds of
movements. By making use of this information of moving vehicle is automatically updated.
Computer
The central part of the car holds all kind of information and this fed from various kinds of
sensors for analyzing data (Aversa and Haefliger, 2016). In it steering, acceleration and brakes
are adjusted as per the need. Computer needs to have basic idea regarding the law along with
unsaid assumption of road.
Aerial
Aerial is known to be accurate positioning data which is used by self-driving car. Various
readings from the car instruments like gyroscope are generally combined with various kinds of
information which is received by GPS satellite. It helps in analyzing the actual position of the
car.
Artificial Intelligence
Artificial intelligence helps the autonomous car with various kinds of decision based on
real time decisions. Data which is obtained from various kinds of hardware sensors and google
map are generally sent to Artificial intelligence for understanding acceleration (Williams, 2016).
The ultimate aim of artificial intelligence is the safety of passengers and lastly destination.
Other technologies
Progress of driverless car technology is being made at various kinds of levels like
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
6PROFESSIONAL ENGINEERING
Data: The data storage capacity and various kinds of multiple sensors like (sensors and
user information) are used for improvisation of data which is available to user. It also focuses on
the fact like reservoir of data along with geographical and traffic data.
Analysis capacity: With various kinds of process like data mining and proper algorithm
is being made possible for going beyond the collection of data which mainly focus on power of
computing and proper capacity for storage.
Automation and artificial intelligence: Apart from data analysis, technology can be
used for various kinds of vehicle act as per needs of information which is processed (Bruun,
2018). It also focuses on making vehicle a bit more intelligent.
The growth of various innovation is creating a platform for various kinds of autonomous
vehicle. This particular technology is designed in such a way that it can take back control of car
in some cases like traffic jam (Dunne et al. 2015). Fully automated vehicle has been tested in
long and possible kind of solution is provided to it. In many cases it is seen that it is limited to
specific stretches that is short distance. Various kind of autonomy resulted in different levels of
autonomy and it is well defined by the society of Automotive engineers. Though there are
differences in model it is developed in such a way that it can provide autonomous kind of
mobility.
The development of driverless car technology will change current model of
transportation. It is will result in advancement in certain domains like management of traffic,
safety of roads and security, capacity of car parking and lastly footprint of environment (Boixo et
al. 2014). Autonomous mobility is not only development axis it is considered to be benefit from
various kinds of new technologies which can be used for changing the trend of vehicle. It will
Data: The data storage capacity and various kinds of multiple sensors like (sensors and
user information) are used for improvisation of data which is available to user. It also focuses on
the fact like reservoir of data along with geographical and traffic data.
Analysis capacity: With various kinds of process like data mining and proper algorithm
is being made possible for going beyond the collection of data which mainly focus on power of
computing and proper capacity for storage.
Automation and artificial intelligence: Apart from data analysis, technology can be
used for various kinds of vehicle act as per needs of information which is processed (Bruun,
2018). It also focuses on making vehicle a bit more intelligent.
The growth of various innovation is creating a platform for various kinds of autonomous
vehicle. This particular technology is designed in such a way that it can take back control of car
in some cases like traffic jam (Dunne et al. 2015). Fully automated vehicle has been tested in
long and possible kind of solution is provided to it. In many cases it is seen that it is limited to
specific stretches that is short distance. Various kind of autonomy resulted in different levels of
autonomy and it is well defined by the society of Automotive engineers. Though there are
differences in model it is developed in such a way that it can provide autonomous kind of
mobility.
The development of driverless car technology will change current model of
transportation. It is will result in advancement in certain domains like management of traffic,
safety of roads and security, capacity of car parking and lastly footprint of environment (Boixo et
al. 2014). Autonomous mobility is not only development axis it is considered to be benefit from
various kinds of new technologies which can be used for changing the trend of vehicle. It will
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
7PROFESSIONAL ENGINEERING
focus on emerging of new car ownership models which ultimately increases the transport
services. Increases in vehicle occupancy rates will ultimately reduce the number of private
vehicle on roads (Rønnow et al. 2014). Rate of occupation of car can be considered to be a
parameter which is generally taken into account of mobility services. It also focuses on
obligation of various kinds of transport service.
It focuses on the efficient management of traffic. Apart from urban and traffic
management flow optimization of traffic management by group management can easily reduce
the fuel consumption around 25%. It will also reduce the level of greenhouse gas emission. It
also focuses on better kind of car management with possibility of car parking. It comes up with
dedicated car parking which are not much close to cars in close proximity of driver’s destination
(Albash et al. 2015). There are some kind of needs regarding autonomous mobility of segment.
Working of Google Car
In Google driverless car the destination is set by the driver and software of the car checks
the possible route and after that start is made on the way (Venuti et al. 2016). LIDAR is a roof
mounted sensor monitor and it generally scans a range of 60 meter around the surrounding of the
car. It generally creates a detailed map in 3D of the intermediate area. It consists of ultrasonic
sensor which is mounted on front and bumpers present on the rear for distancing to various
obstacles. Various kinds of sensors are connected to Artificial intelligence software in the car
and makes an input from Google video cars and various kinds of video cameras and street view.
Artificial intelligence helps in having real time decision and human perception which controls
various kinds like acceleration and brakes (Pudenz, Albash and Lidar, 2015). The surface which
is installed in the car makes a consultation with Google Maps for various kinds of advanced
focus on emerging of new car ownership models which ultimately increases the transport
services. Increases in vehicle occupancy rates will ultimately reduce the number of private
vehicle on roads (Rønnow et al. 2014). Rate of occupation of car can be considered to be a
parameter which is generally taken into account of mobility services. It also focuses on
obligation of various kinds of transport service.
It focuses on the efficient management of traffic. Apart from urban and traffic
management flow optimization of traffic management by group management can easily reduce
the fuel consumption around 25%. It will also reduce the level of greenhouse gas emission. It
also focuses on better kind of car management with possibility of car parking. It comes up with
dedicated car parking which are not much close to cars in close proximity of driver’s destination
(Albash et al. 2015). There are some kind of needs regarding autonomous mobility of segment.
Working of Google Car
In Google driverless car the destination is set by the driver and software of the car checks
the possible route and after that start is made on the way (Venuti et al. 2016). LIDAR is a roof
mounted sensor monitor and it generally scans a range of 60 meter around the surrounding of the
car. It generally creates a detailed map in 3D of the intermediate area. It consists of ultrasonic
sensor which is mounted on front and bumpers present on the rear for distancing to various
obstacles. Various kinds of sensors are connected to Artificial intelligence software in the car
and makes an input from Google video cars and various kinds of video cameras and street view.
Artificial intelligence helps in having real time decision and human perception which controls
various kinds like acceleration and brakes (Pudenz, Albash and Lidar, 2015). The surface which
is installed in the car makes a consultation with Google Maps for various kinds of advanced
8PROFESSIONAL ENGINEERING
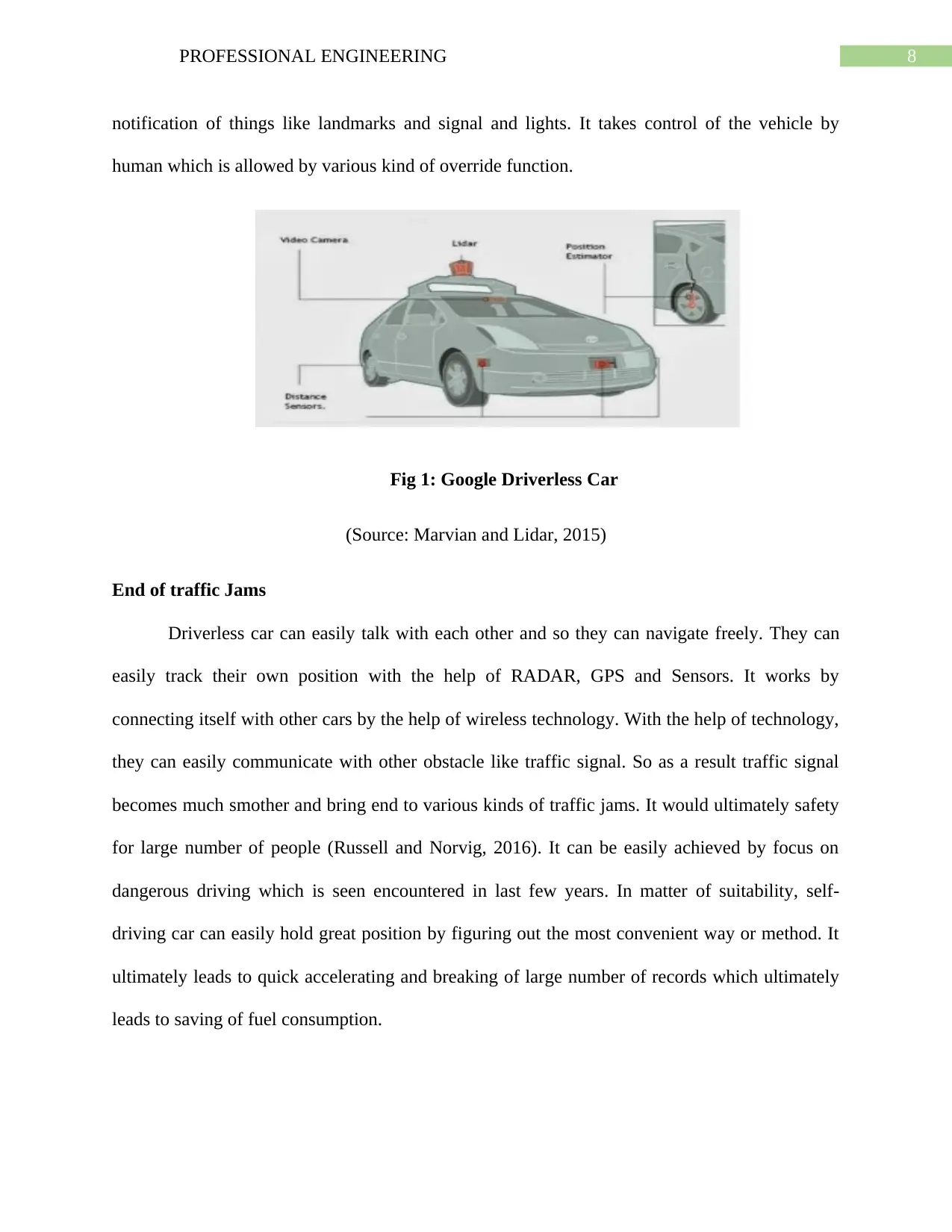
notification of things like landmarks and signal and lights. It takes control of the vehicle by
human which is allowed by various kind of override function.
Fig 1: Google Driverless Car
(Source: Marvian and Lidar, 2015)
End of traffic Jams
Driverless car can easily talk with each other and so they can navigate freely. They can
easily track their own position with the help of RADAR, GPS and Sensors. It works by
connecting itself with other cars by the help of wireless technology. With the help of technology,
they can easily communicate with other obstacle like traffic signal. So as a result traffic signal
becomes much smother and bring end to various kinds of traffic jams. It would ultimately safety
for large number of people (Russell and Norvig, 2016). It can be easily achieved by focus on
dangerous driving which is seen encountered in last few years. In matter of suitability, self-
driving car can easily hold great position by figuring out the most convenient way or method. It
ultimately leads to quick accelerating and breaking of large number of records which ultimately
leads to saving of fuel consumption.
notification of things like landmarks and signal and lights. It takes control of the vehicle by
human which is allowed by various kind of override function.
Fig 1: Google Driverless Car
(Source: Marvian and Lidar, 2015)
End of traffic Jams
Driverless car can easily talk with each other and so they can navigate freely. They can
easily track their own position with the help of RADAR, GPS and Sensors. It works by
connecting itself with other cars by the help of wireless technology. With the help of technology,
they can easily communicate with other obstacle like traffic signal. So as a result traffic signal
becomes much smother and bring end to various kinds of traffic jams. It would ultimately safety
for large number of people (Russell and Norvig, 2016). It can be easily achieved by focus on
dangerous driving which is seen encountered in last few years. In matter of suitability, self-
driving car can easily hold great position by figuring out the most convenient way or method. It
ultimately leads to quick accelerating and breaking of large number of records which ultimately
leads to saving of fuel consumption.
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
9PROFESSIONAL ENGINEERING
Need of Driverless car in future
Driverless car will eliminate various kinds of issues in the near future. Any kind of
changes especially the major can easily remove obstacles which is encountered by the player.
This kind of obstacle cannot hamper reflection and generation of idea (Nilsson, 2014). They
must not be altered or anticipated anyhow. Various kinds of technologies can be considered to be
vulnerable. This merely focus on increasing and driving function can be easily exposed to
tampering. Some Chinese organization analyzed the various kinds weak points which can
exploited by various kinds of hackers (Wagner and Choset, 2015). Hijacking of various car can
easily cause a large number of accidents. Connected cars and autonomous vehicle offer a large
number of opportunity in the matters of safety and security of road. So the idea is not limited to
detection of initial risk of vehicle but it also focuses on numerous kind of opportunities in terms
of safety and security (Wenger, 2014). This idea is not limited to exercise of detection of vehicle
initial risk potential but it rather focuses on detection of initial potential risk. It stresses on
examine of possible solution which is available and addressing of cyber risk by analyzing cyber
security.
It is expected that autonomous car will focus on 70% to 90% of taxi road in the coming
future (Skowron, Faliszewski and Lang, 2016). Driverless car will ultimately result in loss of
large number of jobs. This particular trend will ultimately result in emergence of new kind of
profession in different levels like production, maintenance and lastly new kind of service.
New technologies are considered to be much more expensive before it reaches the stage
of mass marketing. It has ultimately led to changes of expected changes in the domain of buying
and ownership related to it (Ghahramani, 2015). Vehicle transport will ultimately result in less
expensive other the period of time and provides a new kind of segment for the population.
Need of Driverless car in future
Driverless car will eliminate various kinds of issues in the near future. Any kind of
changes especially the major can easily remove obstacles which is encountered by the player.
This kind of obstacle cannot hamper reflection and generation of idea (Nilsson, 2014). They
must not be altered or anticipated anyhow. Various kinds of technologies can be considered to be
vulnerable. This merely focus on increasing and driving function can be easily exposed to
tampering. Some Chinese organization analyzed the various kinds weak points which can
exploited by various kinds of hackers (Wagner and Choset, 2015). Hijacking of various car can
easily cause a large number of accidents. Connected cars and autonomous vehicle offer a large
number of opportunity in the matters of safety and security of road. So the idea is not limited to
detection of initial risk of vehicle but it also focuses on numerous kind of opportunities in terms
of safety and security (Wenger, 2014). This idea is not limited to exercise of detection of vehicle
initial risk potential but it rather focuses on detection of initial potential risk. It stresses on
examine of possible solution which is available and addressing of cyber risk by analyzing cyber
security.
It is expected that autonomous car will focus on 70% to 90% of taxi road in the coming
future (Skowron, Faliszewski and Lang, 2016). Driverless car will ultimately result in loss of
large number of jobs. This particular trend will ultimately result in emergence of new kind of
profession in different levels like production, maintenance and lastly new kind of service.
New technologies are considered to be much more expensive before it reaches the stage
of mass marketing. It has ultimately led to changes of expected changes in the domain of buying
and ownership related to it (Ghahramani, 2015). Vehicle transport will ultimately result in less
expensive other the period of time and provides a new kind of segment for the population.
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
10PROFESSIONAL ENGINEERING
Seamless solution of mobility can be offered to person which will reduce mobility. Stance which
is adopted here can be considered to opportunity for creating value (Glymour, Scheines and
Spirtes, 2014). This does not mean that driverless cars are flawless. The above report is presented
by negative impact of driverless car.
Benefits of Driverless Car
Lesser number of traffic.
Increase safety.
It will result in more kind of free time.
It will provide better transport service.
It will reduce emission of harmful gases.
It will increase the demand for new jobs.
Drawbacks of Driverless Car
Self-driving cars are costlier than normal car.
Possibility of crash due to minor computer malfunction.
Problems can arise due to bad kind of weather
Driverless car will change the system of road.
Driverless car can be easily used by terrorists.
It will be difficult for autonomous car to understand hand signal.
Conclusion
From the above discussion it can be easily concluded that this report is all about
implementation of driverless car in Daniel corporation. An analysis has been done on Google
Seamless solution of mobility can be offered to person which will reduce mobility. Stance which
is adopted here can be considered to opportunity for creating value (Glymour, Scheines and
Spirtes, 2014). This does not mean that driverless cars are flawless. The above report is presented
by negative impact of driverless car.
Benefits of Driverless Car
Lesser number of traffic.
Increase safety.
It will result in more kind of free time.
It will provide better transport service.
It will reduce emission of harmful gases.
It will increase the demand for new jobs.
Drawbacks of Driverless Car
Self-driving cars are costlier than normal car.
Possibility of crash due to minor computer malfunction.
Problems can arise due to bad kind of weather
Driverless car will change the system of road.
Driverless car can be easily used by terrorists.
It will be difficult for autonomous car to understand hand signal.
Conclusion
From the above discussion it can be easily concluded that this report is all about
implementation of driverless car in Daniel corporation. An analysis has been done on Google
11PROFESSIONAL ENGINEERING
driverless car in the above pages of the report. Three important element of driverless car
technology that is Google map, Sensor and lastly artificial intelligence has been discussed in
details. Various kinds of hardware sensors like distance sensors, aerial, computers have been
discussed briefly. An idea has been provided regarding LIDAR in the above pages of the report.
The need of video camera in driverless car has been described in details. After that the need of
position estimator, computers, aerial, artificial intelligence and other kinds of technologies has
been described in details. The working of Google Car along with image has been described in
details in the above pages of the report. An idea has been provided regarding the fact how
driverless car will help in removal of traffic jams. After that an idea has been provided regarding
the need of driverless in the upcoming future. Various kinds of benefits and drawbacks of
driverless car has been described in details in the above pages of the car. Various kinds of
technologies like anti-lock brakes (ABS) and electronic stability (ESC) has been discussed in
details.
driverless car in the above pages of the report. Three important element of driverless car
technology that is Google map, Sensor and lastly artificial intelligence has been discussed in
details. Various kinds of hardware sensors like distance sensors, aerial, computers have been
discussed briefly. An idea has been provided regarding LIDAR in the above pages of the report.
The need of video camera in driverless car has been described in details. After that the need of
position estimator, computers, aerial, artificial intelligence and other kinds of technologies has
been described in details. The working of Google Car along with image has been described in
details in the above pages of the report. An idea has been provided regarding the fact how
driverless car will help in removal of traffic jams. After that an idea has been provided regarding
the need of driverless in the upcoming future. Various kinds of benefits and drawbacks of
driverless car has been described in details in the above pages of the car. Various kinds of
technologies like anti-lock brakes (ABS) and electronic stability (ESC) has been discussed in
details.
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
1 out of 15
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.