Deakin University SEE710 Instrumentation: Sensor Technology Report
VerifiedAdded on 2022/10/06
|14
|2726
|29
Report
AI Summary
This report, prepared for SEE710 Instrumentation and Process Control, presents a feasibility study on sensor technology for an engineering process. The report begins by describing the principle of a suitable sensor technology, followed by a critical review of its specifications, including reasons for its selection and a comparison with other suitable technologies. The report then delves into a research component, analyzing journal articles related to digital and industrial control, focusing on applications, implementation aspects like sampling time selection, and hardware considerations. The core of the document is an essay that synthesizes the research findings, offering insights into the practical application and the selection of sensor technology for engineering automation, with a focus on hardware-efficient programmable deviation controllers for indirect energy transfer DC-DC converters. The report also discusses the advantages and disadvantages of the selected technology, and suggests solutions to improve the performance of the controller. The aim is to provide a comprehensive analysis for the client's consideration.
INSTRUMENTATION
By Name
Course
Instructor
Institution
Location
Date
By Name
Course
Instructor
Institution
Location
Date
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
HARDWARE-EFFICIENT PROGRAMMABLE-DEVIATION CONTROLLER FOR
INDIRECT ENERGY TRANSFER DC-DC CONVERTERS
Introduction
To lower the rate at which the components react, Switch-Mode Power Supplies (SMPS)
controllers are developed in a manner that they are highly sensitive to load transients alongside
other disturbances. Analog SMPS are predominantly preferred for power supply cases of low-to-
medium to multiply the number of watts putting into consideration the cost effectiveness as a
factor. In this instance, a relatively wide bandwidth control loop is preferred to obtain a fast
response. The current hardware digital controllers which are more efficient are in place to allow
installation of more developed nonlinear control techniques for the systems of low to medium
operations, enhancing dynamic operations and therefore minimizing the size of the output
capacitor by great percentage (Wang et al 2017).
From all the controllers, only minimum deviation and time optimal controllers have indicated
transient response composed of the lowest voltage deviation for the converters that operates on
direct transfer basis of energy like the forward and back topologies. I reality, the transient
response of the load is usually related with the lowest possible output voltage deviation resulting
into a smaller value in the output capacitance. This is however contrary as for the case of boost
converter which is an indirect energy transfer system. However, the voltage deviation that is
generated by time-optimal response is slightly higher than the minimum output voltage
deviation, and these results into an extensive current stress of the component (Monteiro 2016).
In addition to that, installation of optimal methods for the indirect systems of energy transfer
calls for an extensive use of hardware compared to converters that operate on direct transfer of
INDIRECT ENERGY TRANSFER DC-DC CONVERTERS
Introduction
To lower the rate at which the components react, Switch-Mode Power Supplies (SMPS)
controllers are developed in a manner that they are highly sensitive to load transients alongside
other disturbances. Analog SMPS are predominantly preferred for power supply cases of low-to-
medium to multiply the number of watts putting into consideration the cost effectiveness as a
factor. In this instance, a relatively wide bandwidth control loop is preferred to obtain a fast
response. The current hardware digital controllers which are more efficient are in place to allow
installation of more developed nonlinear control techniques for the systems of low to medium
operations, enhancing dynamic operations and therefore minimizing the size of the output
capacitor by great percentage (Wang et al 2017).
From all the controllers, only minimum deviation and time optimal controllers have indicated
transient response composed of the lowest voltage deviation for the converters that operates on
direct transfer basis of energy like the forward and back topologies. I reality, the transient
response of the load is usually related with the lowest possible output voltage deviation resulting
into a smaller value in the output capacitance. This is however contrary as for the case of boost
converter which is an indirect energy transfer system. However, the voltage deviation that is
generated by time-optimal response is slightly higher than the minimum output voltage
deviation, and these results into an extensive current stress of the component (Monteiro 2016).
In addition to that, installation of optimal methods for the indirect systems of energy transfer
calls for an extensive use of hardware compared to converters that operate on direct transfer of
energy. This is due to the demand of the controller responsible for providing solutions to a bit
complex equations depending on the point of operation. For that reason, the currently designed
time-optimal controllers are not common in their applications for the case of converters
operating in indirect transfer of energy.
This paper mainly aims at presenting a controller for the converters that operate in indirect
transfer of energy with smaller deviations in the output voltage compared to time-optimal
converters enabling a reduction in the output values of the capacitor. This new controller is
characterized by less implementations of hardware and at the same time capable of reducing
current stress of the component. A programmable deviation controller shown in the figure below
is basically developed for reactive capacitor and inductor converters with output filters and is just
a simple enhancement of the conventional mixed-signal peak system of Current Programmed
Mode (CPM). Just as for the case of conventional systems, the inner current loop assumes an
analog structure while the outer current loop is designed in a digital manner (Peretz et al 2014).
The voltage loop generates a digital peak or valley current value reference denoted by iref [n] after
which the value is converted to analog equivalent by use of digital-analog converter (DAC). At
steady conditions, calculation of the reference is done by a PI compensator in consideration to
the signal error of the voltage loop eV[n] and a comparison is made for the DAC output and the
value obtained from the inductor current RsiL (t), using a comparator I cpm. The comparator
output is then fed into S-R latch to generate a modulated signal pulse c (t) just as in other
solutions of CPM. The enhancement on the system involves addition of two novel blocks, output
current self-tuning estimator and transient suppression block.
On detecting the load transient, the blocks assumes the operation of generating modulated signal
pulse width from the conventional controller and also offers transient response of approximately
complex equations depending on the point of operation. For that reason, the currently designed
time-optimal controllers are not common in their applications for the case of converters
operating in indirect transfer of energy.
This paper mainly aims at presenting a controller for the converters that operate in indirect
transfer of energy with smaller deviations in the output voltage compared to time-optimal
converters enabling a reduction in the output values of the capacitor. This new controller is
characterized by less implementations of hardware and at the same time capable of reducing
current stress of the component. A programmable deviation controller shown in the figure below
is basically developed for reactive capacitor and inductor converters with output filters and is just
a simple enhancement of the conventional mixed-signal peak system of Current Programmed
Mode (CPM). Just as for the case of conventional systems, the inner current loop assumes an
analog structure while the outer current loop is designed in a digital manner (Peretz et al 2014).
The voltage loop generates a digital peak or valley current value reference denoted by iref [n] after
which the value is converted to analog equivalent by use of digital-analog converter (DAC). At
steady conditions, calculation of the reference is done by a PI compensator in consideration to
the signal error of the voltage loop eV[n] and a comparison is made for the DAC output and the
value obtained from the inductor current RsiL (t), using a comparator I cpm. The comparator
output is then fed into S-R latch to generate a modulated signal pulse c (t) just as in other
solutions of CPM. The enhancement on the system involves addition of two novel blocks, output
current self-tuning estimator and transient suppression block.
On detecting the load transient, the blocks assumes the operation of generating modulated signal
pulse width from the conventional controller and also offers transient response of approximately
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
lowest possible deviation in voltage. A new transient control system is developed by the transient
suppression block with dynamical change effects on the off and on periods of the transistor, with
regard to the induced valley/ peak current pre-set values and the highest possible pre-
programmed voltage deviation. The main role of the estimator is to offer a suppression logic with
approximate current values of the new conductor that the algorithm demands. After completion
of transient recovery, the controller assumes its original steady condition of operation.
Transient Mode Controller
Designing of the transient mode controller is facilitated by the concept of optimum deviation for
the converters that operate in the state of direct transfer of energy. For this case, a direct focus on
deviation is of interest rather than making an attempt to minimize the output voltage deviation by
reducing the period of recovery which is a direct technique. For the two-step mechanism
illustrated in the figure below, the current waveform of the conductor is modified to suit the
current steady state waveform that allows the compensator to recover the voltage at the stipulated
period of time. Though, following the complex relationships between the load currents, low
voltage deviation and the inductor, it is impossible to employ the above technique directly for
converters operating under indirect transfer of energy (Buso and Caldognetto 2014).
The programmable deviation controller presented in this paper together with the programming
reconstructions, the programming technique also involves the current value of the new inductor
(obtained by estimating the output current) and also the highest possible voltage deviation. These
values are both used to derive the estimates of the minimum possible deviation response while
the converter is operating under predetermined switching frequency range.
suppression block with dynamical change effects on the off and on periods of the transistor, with
regard to the induced valley/ peak current pre-set values and the highest possible pre-
programmed voltage deviation. The main role of the estimator is to offer a suppression logic with
approximate current values of the new conductor that the algorithm demands. After completion
of transient recovery, the controller assumes its original steady condition of operation.
Transient Mode Controller
Designing of the transient mode controller is facilitated by the concept of optimum deviation for
the converters that operate in the state of direct transfer of energy. For this case, a direct focus on
deviation is of interest rather than making an attempt to minimize the output voltage deviation by
reducing the period of recovery which is a direct technique. For the two-step mechanism
illustrated in the figure below, the current waveform of the conductor is modified to suit the
current steady state waveform that allows the compensator to recover the voltage at the stipulated
period of time. Though, following the complex relationships between the load currents, low
voltage deviation and the inductor, it is impossible to employ the above technique directly for
converters operating under indirect transfer of energy (Buso and Caldognetto 2014).
The programmable deviation controller presented in this paper together with the programming
reconstructions, the programming technique also involves the current value of the new inductor
(obtained by estimating the output current) and also the highest possible voltage deviation. These
values are both used to derive the estimates of the minimum possible deviation response while
the converter is operating under predetermined switching frequency range.
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
As illustrated in the entire work of this paper, this design technique has three major associated
advantages over the solutions of time-optimal for the converters operating under indirect transfer
of energy mechanism. These advantages include:
1. The complex computations related to time-optimal solutions is greatly reduced in this
case making the design to be simpler in terms of implementation of the controller and
efficiency of the hardware.
2. This technique results into much smaller deviation desired for the output voltage enabling
minimization on the output of the capacitor.
3. The minimum current value of the inductor is very low, somehow same as that of
nominal steady condition thereby minimizing current stress on the component enabling a
reduction on the output of the inductor (Abate et al 2017).
Such advantages are as a result of eliminating the convoluted calculations of the on and off
switching times and also from the self-dependence on state space variable amplitudes, which
does not appear difficult to obtain. How the programmable deviation controller operates is
clearly depicted by a sample of boost converter by relating it to standard time-optimal solution.
The figures below are the illustrations of load current, inductor current and the voltage output of
the capacitor at transients respectively, both in the domains of state-plane and time.
The boost converter was regulated by near-minimum-deviation operation at the time of light to
heavy load transient with output voltage at the middle, load and inductor current at the top and a
state-plane current and voltage representation at the bottom. The parameters of the system are
VIN = 12V, Vout = 48V, Iload – within the range of 1A to 4.5A (Bessa et al 2016).
advantages over the solutions of time-optimal for the converters operating under indirect transfer
of energy mechanism. These advantages include:
1. The complex computations related to time-optimal solutions is greatly reduced in this
case making the design to be simpler in terms of implementation of the controller and
efficiency of the hardware.
2. This technique results into much smaller deviation desired for the output voltage enabling
minimization on the output of the capacitor.
3. The minimum current value of the inductor is very low, somehow same as that of
nominal steady condition thereby minimizing current stress on the component enabling a
reduction on the output of the inductor (Abate et al 2017).
Such advantages are as a result of eliminating the convoluted calculations of the on and off
switching times and also from the self-dependence on state space variable amplitudes, which
does not appear difficult to obtain. How the programmable deviation controller operates is
clearly depicted by a sample of boost converter by relating it to standard time-optimal solution.
The figures below are the illustrations of load current, inductor current and the voltage output of
the capacitor at transients respectively, both in the domains of state-plane and time.
The boost converter was regulated by near-minimum-deviation operation at the time of light to
heavy load transient with output voltage at the middle, load and inductor current at the top and a
state-plane current and voltage representation at the bottom. The parameters of the system are
VIN = 12V, Vout = 48V, Iload – within the range of 1A to 4.5A (Bessa et al 2016).
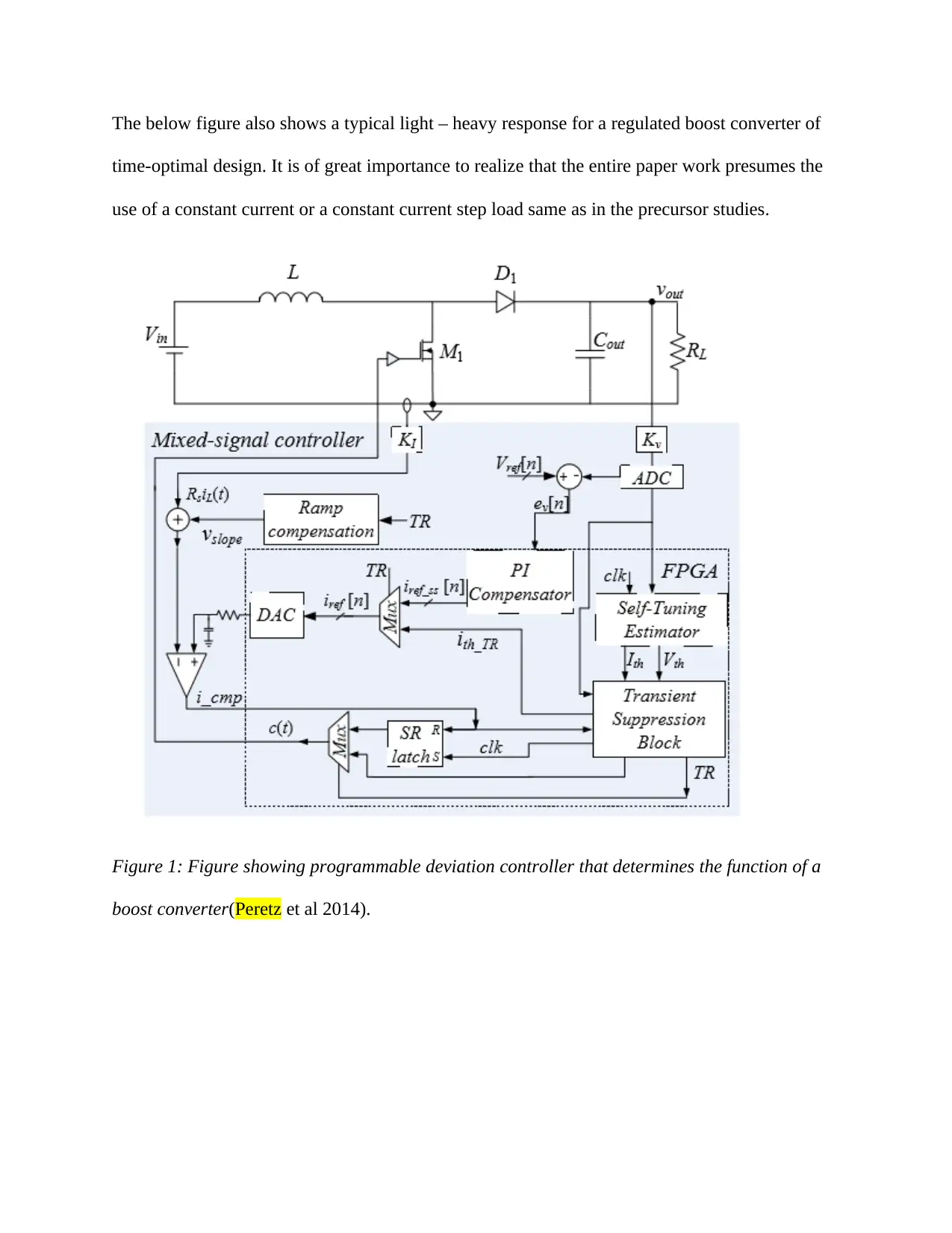
The below figure also shows a typical light – heavy response for a regulated boost converter of
time-optimal design. It is of great importance to realize that the entire paper work presumes the
use of a constant current or a constant current step load same as in the precursor studies.
Figure 1: Figure showing programmable deviation controller that determines the function of a
boost converter(Peretz et al 2014).
time-optimal design. It is of great importance to realize that the entire paper work presumes the
use of a constant current or a constant current step load same as in the precursor studies.
Figure 1: Figure showing programmable deviation controller that determines the function of a
boost converter(Peretz et al 2014).
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
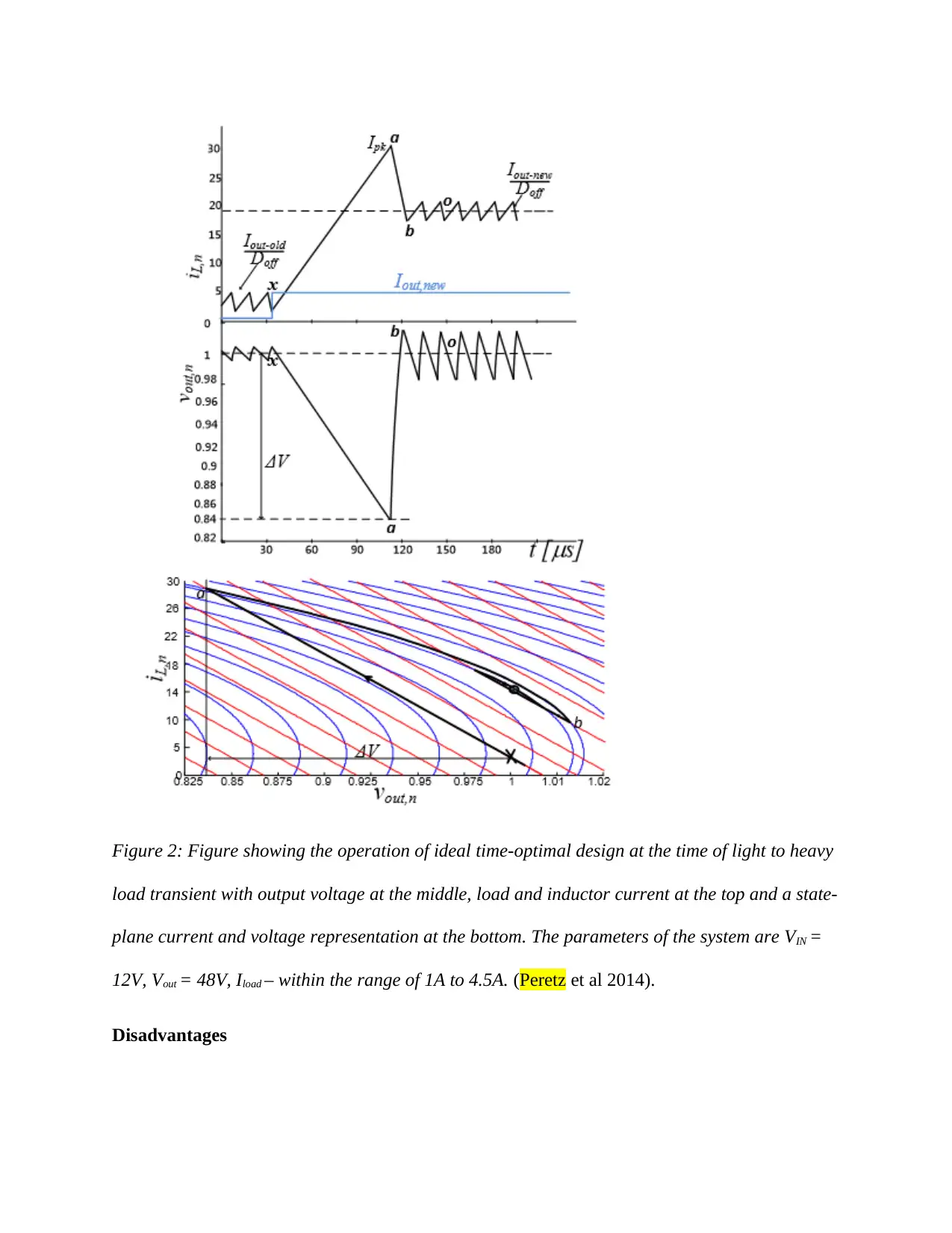
Figure 2: Figure showing the operation of ideal time-optimal design at the time of light to heavy
load transient with output voltage at the middle, load and inductor current at the top and a state-
plane current and voltage representation at the bottom. The parameters of the system are VIN =
12V, Vout = 48V, Iload – within the range of 1A to 4.5A. (Peretz et al 2014).
Disadvantages
load transient with output voltage at the middle, load and inductor current at the top and a state-
plane current and voltage representation at the bottom. The parameters of the system are VIN =
12V, Vout = 48V, Iload – within the range of 1A to 4.5A. (Peretz et al 2014).
Disadvantages
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
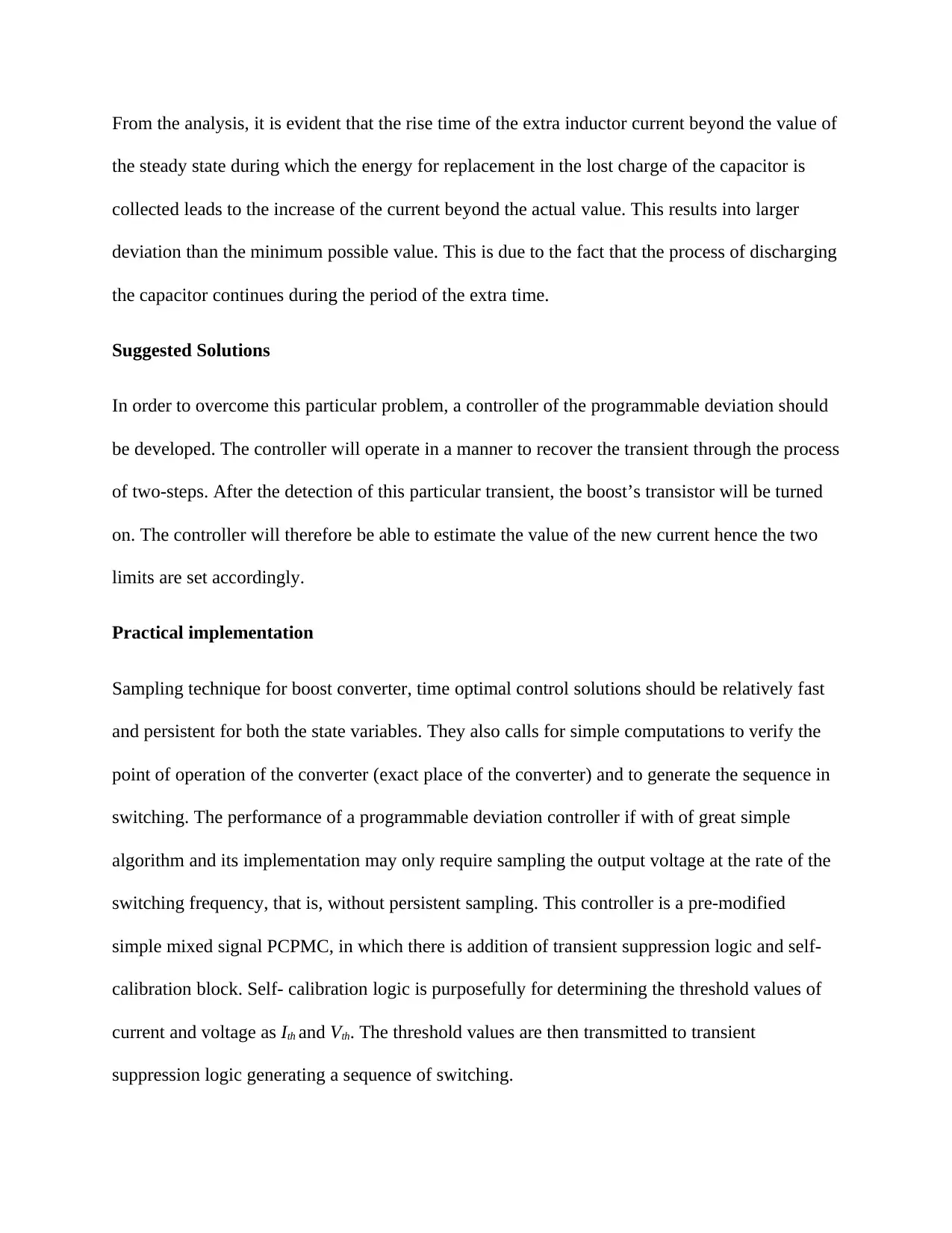
From the analysis, it is evident that the rise time of the extra inductor current beyond the value of
the steady state during which the energy for replacement in the lost charge of the capacitor is
collected leads to the increase of the current beyond the actual value. This results into larger
deviation than the minimum possible value. This is due to the fact that the process of discharging
the capacitor continues during the period of the extra time.
Suggested Solutions
In order to overcome this particular problem, a controller of the programmable deviation should
be developed. The controller will operate in a manner to recover the transient through the process
of two-steps. After the detection of this particular transient, the boost’s transistor will be turned
on. The controller will therefore be able to estimate the value of the new current hence the two
limits are set accordingly.
Practical implementation
Sampling technique for boost converter, time optimal control solutions should be relatively fast
and persistent for both the state variables. They also calls for simple computations to verify the
point of operation of the converter (exact place of the converter) and to generate the sequence in
switching. The performance of a programmable deviation controller if with of great simple
algorithm and its implementation may only require sampling the output voltage at the rate of the
switching frequency, that is, without persistent sampling. This controller is a pre-modified
simple mixed signal PCPMC, in which there is addition of transient suppression logic and self-
calibration block. Self- calibration logic is purposefully for determining the threshold values of
current and voltage as Ith and Vth. The threshold values are then transmitted to transient
suppression logic generating a sequence of switching.
the steady state during which the energy for replacement in the lost charge of the capacitor is
collected leads to the increase of the current beyond the actual value. This results into larger
deviation than the minimum possible value. This is due to the fact that the process of discharging
the capacitor continues during the period of the extra time.
Suggested Solutions
In order to overcome this particular problem, a controller of the programmable deviation should
be developed. The controller will operate in a manner to recover the transient through the process
of two-steps. After the detection of this particular transient, the boost’s transistor will be turned
on. The controller will therefore be able to estimate the value of the new current hence the two
limits are set accordingly.
Practical implementation
Sampling technique for boost converter, time optimal control solutions should be relatively fast
and persistent for both the state variables. They also calls for simple computations to verify the
point of operation of the converter (exact place of the converter) and to generate the sequence in
switching. The performance of a programmable deviation controller if with of great simple
algorithm and its implementation may only require sampling the output voltage at the rate of the
switching frequency, that is, without persistent sampling. This controller is a pre-modified
simple mixed signal PCPMC, in which there is addition of transient suppression logic and self-
calibration block. Self- calibration logic is purposefully for determining the threshold values of
current and voltage as Ith and Vth. The threshold values are then transmitted to transient
suppression logic generating a sequence of switching.
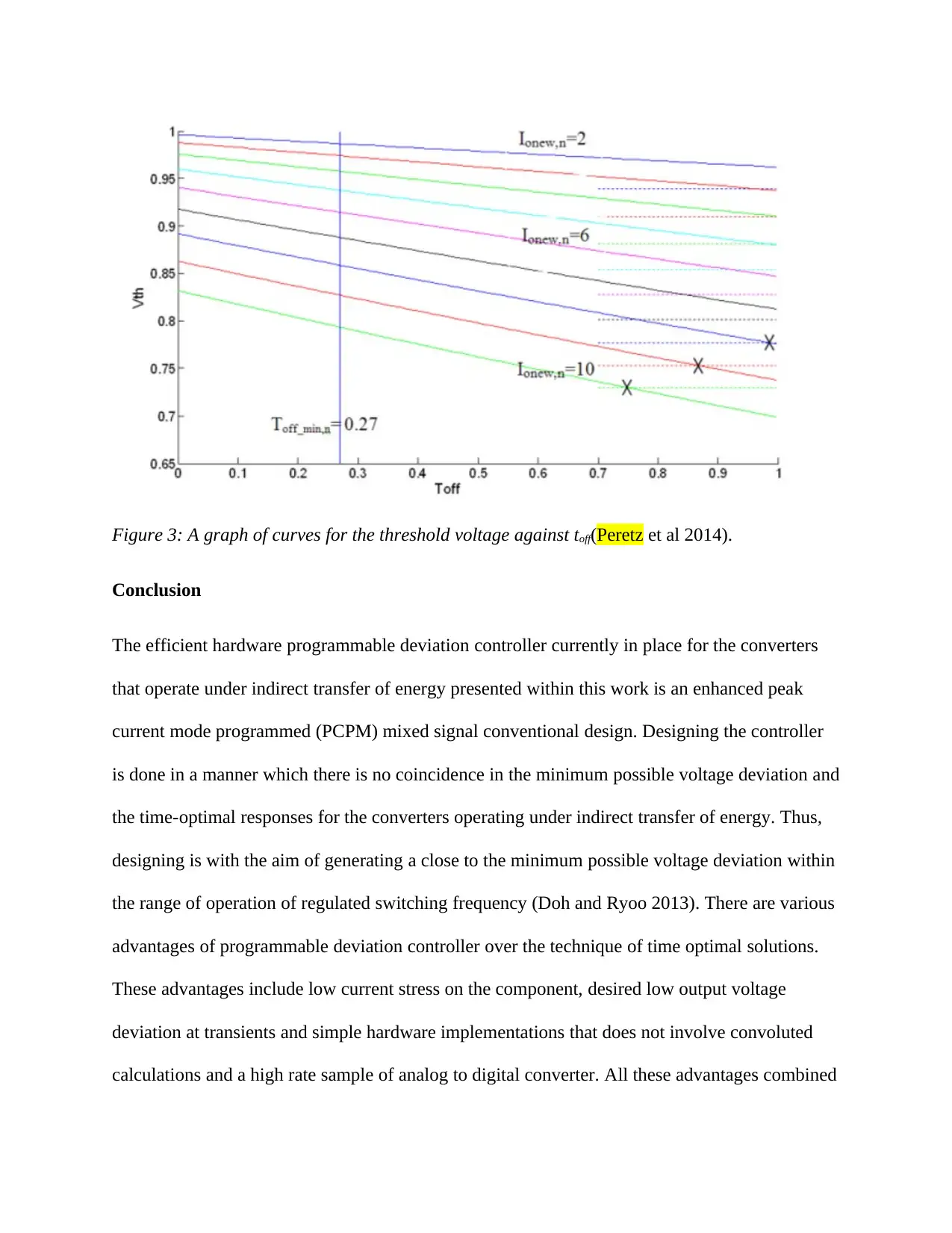
Figure 3: A graph of curves for the threshold voltage against toff(Peretz et al 2014).
Conclusion
The efficient hardware programmable deviation controller currently in place for the converters
that operate under indirect transfer of energy presented within this work is an enhanced peak
current mode programmed (PCPM) mixed signal conventional design. Designing the controller
is done in a manner which there is no coincidence in the minimum possible voltage deviation and
the time-optimal responses for the converters operating under indirect transfer of energy. Thus,
designing is with the aim of generating a close to the minimum possible voltage deviation within
the range of operation of regulated switching frequency (Doh and Ryoo 2013). There are various
advantages of programmable deviation controller over the technique of time optimal solutions.
These advantages include low current stress on the component, desired low output voltage
deviation at transients and simple hardware implementations that does not involve convoluted
calculations and a high rate sample of analog to digital converter. All these advantages combined
Conclusion
The efficient hardware programmable deviation controller currently in place for the converters
that operate under indirect transfer of energy presented within this work is an enhanced peak
current mode programmed (PCPM) mixed signal conventional design. Designing the controller
is done in a manner which there is no coincidence in the minimum possible voltage deviation and
the time-optimal responses for the converters operating under indirect transfer of energy. Thus,
designing is with the aim of generating a close to the minimum possible voltage deviation within
the range of operation of regulated switching frequency (Doh and Ryoo 2013). There are various
advantages of programmable deviation controller over the technique of time optimal solutions.
These advantages include low current stress on the component, desired low output voltage
deviation at transients and simple hardware implementations that does not involve convoluted
calculations and a high rate sample of analog to digital converter. All these advantages combined
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
enable great minimization of reactive converter components leading to reduced current stress on
the switches of the semiconductor material. The paper also presents performance of the
controller for consecutive transient cases which is of great consideration for the converters
operating under indirect transfer of energy. An intensive research has been employed to cover
the issues of nested transients.
The performance of controller in a steady state assumes a simple output regulator of PCPM. The
controller sets limits for the output voltage as well as the inductor current during transients to
obtain the closest minimum deviation in voltage for an encoded range of frequency and also to
ascertain a merge to the new steady state of operation. The generated boundaries are on the
consideration that, for boost converter, the ideal minimum deviation calls for an equality in the
current traversing the boundary to that of the new steady state and the voltage within the
boundary be equal to the minimum deviation. Due to that, the converter acquires the new steady
state of performance at a high switching frequency. To lower such high switching frequency,
minimum value of the boundary voltage is analyzed and appropriately applied within the control
algorithm.
An experimental verification is done to determine whether the newly devised controller is
effective or not. This is achieved by comparing the controller with the conventional PCMP and
time optimal solutions. Findings indicate that the modified PCMP system has better transient
operation features compared to other presented solutions like time optimum ignoring the
convoluted computations and the need for the high sampling rate of analog-digital converters.
the switches of the semiconductor material. The paper also presents performance of the
controller for consecutive transient cases which is of great consideration for the converters
operating under indirect transfer of energy. An intensive research has been employed to cover
the issues of nested transients.
The performance of controller in a steady state assumes a simple output regulator of PCPM. The
controller sets limits for the output voltage as well as the inductor current during transients to
obtain the closest minimum deviation in voltage for an encoded range of frequency and also to
ascertain a merge to the new steady state of operation. The generated boundaries are on the
consideration that, for boost converter, the ideal minimum deviation calls for an equality in the
current traversing the boundary to that of the new steady state and the voltage within the
boundary be equal to the minimum deviation. Due to that, the converter acquires the new steady
state of performance at a high switching frequency. To lower such high switching frequency,
minimum value of the boundary voltage is analyzed and appropriately applied within the control
algorithm.
An experimental verification is done to determine whether the newly devised controller is
effective or not. This is achieved by comparing the controller with the conventional PCMP and
time optimal solutions. Findings indicate that the modified PCMP system has better transient
operation features compared to other presented solutions like time optimum ignoring the
convoluted computations and the need for the high sampling rate of analog-digital converters.
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
REFERENCES
Abate, A., Bessa, I., Cattaruzza, D., Cordeiro, L., David, C., Kesseli, P., Kroening, D. and
Polgreen, E., 2017, July. Automated formal synthesis of digital controllers for state-space
physical plants. In International Conference on Computer Aided Verification (pp. 462-482).
Springer, Cham.
Bessa, I.V., Ismail, H.I., Cordeiro, L.C. and Joao Filho, E.C., 2016. Verification of fixed-point
digital controllers using direct and delta forms realizations. Design Automation for Embedded
Systems, 20(2), pp.95-126.
Buso, S. and Caldognetto, T., 2014. Rapid prototyping of digital controllers for microgrid
inverters. IEEE Journal of Emerging and Selected Topics in Power Electronics, 3(2), pp.440-
450.
Chang, W.H. and Liu, C.Y., Flexiworld Tech Inc, 2017. Mobile information apparatus that
includes intelligent wireless display, wireless direct display, or transfer of digital content for
playing over air the digital content at smart televisions, television controllers, or audio output
devices. U.S. Patent 9,836,257.
Doh, T.Y. and Ryoo, J.R., 2013. Improvement of the transient response by partially
compensating initial values of digital controllers. Journal of Institute of Control, Robotics and
Systems, 19(4), pp.285-289.
Monteiro, F.R., 2016, November. Bounded model checking of state-space digital systems: the
impact of finite word-length effects on the implementation of fixed-point digital controllers
Abate, A., Bessa, I., Cattaruzza, D., Cordeiro, L., David, C., Kesseli, P., Kroening, D. and
Polgreen, E., 2017, July. Automated formal synthesis of digital controllers for state-space
physical plants. In International Conference on Computer Aided Verification (pp. 462-482).
Springer, Cham.
Bessa, I.V., Ismail, H.I., Cordeiro, L.C. and Joao Filho, E.C., 2016. Verification of fixed-point
digital controllers using direct and delta forms realizations. Design Automation for Embedded
Systems, 20(2), pp.95-126.
Buso, S. and Caldognetto, T., 2014. Rapid prototyping of digital controllers for microgrid
inverters. IEEE Journal of Emerging and Selected Topics in Power Electronics, 3(2), pp.440-
450.
Chang, W.H. and Liu, C.Y., Flexiworld Tech Inc, 2017. Mobile information apparatus that
includes intelligent wireless display, wireless direct display, or transfer of digital content for
playing over air the digital content at smart televisions, television controllers, or audio output
devices. U.S. Patent 9,836,257.
Doh, T.Y. and Ryoo, J.R., 2013. Improvement of the transient response by partially
compensating initial values of digital controllers. Journal of Institute of Control, Robotics and
Systems, 19(4), pp.285-289.
Monteiro, F.R., 2016, November. Bounded model checking of state-space digital systems: the
impact of finite word-length effects on the implementation of fixed-point digital controllers
based on state-space modeling. In Proceedings of the 2016 24th ACM SIGSOFT International
Symposium on Foundations of Software Engineering (pp. 1151-1153). ACM.
Peretz, M.M., Mahdavikhah, B. and Prodić, A., 2014. Hardware-efficient programmable-
deviation controller for indirect energy transfer DC–DC converters. IEEE Transactions on
Power Electronics, 30(6), pp.3376-3388.
Wang, G., Cheng, J., Chen, J. and He, Y., 2017. Multi-resonant piezoelectric shunting induced
by digital controllers for subwavelength elastic wave attenuation in smart metamaterial. Smart
Materials and Structures, 26(2), p.025031.
Symposium on Foundations of Software Engineering (pp. 1151-1153). ACM.
Peretz, M.M., Mahdavikhah, B. and Prodić, A., 2014. Hardware-efficient programmable-
deviation controller for indirect energy transfer DC–DC converters. IEEE Transactions on
Power Electronics, 30(6), pp.3376-3388.
Wang, G., Cheng, J., Chen, J. and He, Y., 2017. Multi-resonant piezoelectric shunting induced
by digital controllers for subwavelength elastic wave attenuation in smart metamaterial. Smart
Materials and Structures, 26(2), p.025031.
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
1 out of 14
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.