IMAT5121 Mobile Robotics | Assignment
VerifiedAdded on 2022/08/30
|15
|2333
|19
AI Summary
Contribute Materials
Your contribution can guide someone’s learning journey. Share your
documents today.
[Company name] | [Company address]
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.
Table of Contents
Introduction............................................................................................................................1
Architecture design..................................................................................................................2
Behavior design.......................................................................................................................3
Experimental design................................................................................................................4
Results.....................................................................................................................................5
Conclusion.............................................................................................................................11
References:............................................................................................................................12
Appendix:..............................................................................................................................13
Introduction............................................................................................................................1
Architecture design..................................................................................................................2
Behavior design.......................................................................................................................3
Experimental design................................................................................................................4
Results.....................................................................................................................................5
Conclusion.............................................................................................................................11
References:............................................................................................................................12
Appendix:..............................................................................................................................13
Introduction
Portable robots can be found in numerous areas of activity, running from missions in threatening
conditions for individuals, (space investigation), to home assistance robots (self-running vacuum
cleaners). To grow new applications, it is important to have test stages. In this manner, portable
robots are generally utilized at re-search research facilities just as colleges. These days, there are
numerous business versatile robots accessible for this reason. Precise position estimation is basic
for a portable robot, particularly in an obscure domain. The traditional dead-retribution strategy
has the issue of amassing wheel slippage blunder (Clark, Rock & Latombe 2003). In this way
this technique isn't reasonable for object conveying tasks where an exact outright position is
required. Accordingly, to keep the mistake from being collected, numerous analysts have felt the
need of the total position estimation. Robot situating can be arranged into two basic strategies:
total and relative situating plans. Relative situating is typically founded on dead retribution like
estimating the wheel pivot edge to process the counterbalance from a known beginning position.
Dead retribution is straightforward, reasonable, and simple to execute continuously. The
weakness of dead retribution is its unbounded collection of blunders. Outright situating plans for
the most part depend on route reference points, dynamic or latent tourist spots, map coordinating,
or satellite-based route signals (Borenstein & Feng 1994).
The structure and progression of complex specialized frameworks is a test for developers. An
especially complex framework is the mechanical framework, as robots use broad capacities just
as a high number of actuators and sensors. Self-ruling robots need performance equipment to
perform complex programming algorithms. Past robots frequently utilized one PC as the
handling unit of the frameworks, actualizing programming without utilizing programming design
approaches appropriate for mechanical frameworks (Fletcher 1987). These product usages need
observing highlights which can be valuable because of safety reasons in mobile robots. Utilizing
a solitary preparing unit additionally denies the expansion of the framework for changing
framework requests in a secluded way. With the rise of single-board PCs (SBC) as more vitality
productive and progressively appropriate answers for handling units of a portable robot,
increasingly more SBCs are utilized. Various micro-controllers are consolidated to an
appropriated framework to acquire additionally figuring force or better steadfastness. Moreover,
particular versatile robots like the AMiRo (Autonomous Mini Robot) have been discharged
(Borenstein & Feng 1994). These particular robots can be expanded effectively and for the most
part utilize different preparing units.
The particular methodology and the utilization of different handling units lead to a disseminated
framework inside a solitary robot. The framework design of those disseminated frameworks
frequently needs answers for satisfy prerequisites required in apply autonomy e.g. ongoing
limitations (Zimmerman et al. 1997). Initial one SBC is utilized as a preparing unit, and later
different SBCs for various sensors, actuators, or Human–Machine Interfaces (HMI) are included.
Not concentrating on the engineering and intending to incorporate new parts for future tasks lead
to issues coordinating those new segments. Solace highlights, similar to perception apparatuses,
Portable robots can be found in numerous areas of activity, running from missions in threatening
conditions for individuals, (space investigation), to home assistance robots (self-running vacuum
cleaners). To grow new applications, it is important to have test stages. In this manner, portable
robots are generally utilized at re-search research facilities just as colleges. These days, there are
numerous business versatile robots accessible for this reason. Precise position estimation is basic
for a portable robot, particularly in an obscure domain. The traditional dead-retribution strategy
has the issue of amassing wheel slippage blunder (Clark, Rock & Latombe 2003). In this way
this technique isn't reasonable for object conveying tasks where an exact outright position is
required. Accordingly, to keep the mistake from being collected, numerous analysts have felt the
need of the total position estimation. Robot situating can be arranged into two basic strategies:
total and relative situating plans. Relative situating is typically founded on dead retribution like
estimating the wheel pivot edge to process the counterbalance from a known beginning position.
Dead retribution is straightforward, reasonable, and simple to execute continuously. The
weakness of dead retribution is its unbounded collection of blunders. Outright situating plans for
the most part depend on route reference points, dynamic or latent tourist spots, map coordinating,
or satellite-based route signals (Borenstein & Feng 1994).
The structure and progression of complex specialized frameworks is a test for developers. An
especially complex framework is the mechanical framework, as robots use broad capacities just
as a high number of actuators and sensors. Self-ruling robots need performance equipment to
perform complex programming algorithms. Past robots frequently utilized one PC as the
handling unit of the frameworks, actualizing programming without utilizing programming design
approaches appropriate for mechanical frameworks (Fletcher 1987). These product usages need
observing highlights which can be valuable because of safety reasons in mobile robots. Utilizing
a solitary preparing unit additionally denies the expansion of the framework for changing
framework requests in a secluded way. With the rise of single-board PCs (SBC) as more vitality
productive and progressively appropriate answers for handling units of a portable robot,
increasingly more SBCs are utilized. Various micro-controllers are consolidated to an
appropriated framework to acquire additionally figuring force or better steadfastness. Moreover,
particular versatile robots like the AMiRo (Autonomous Mini Robot) have been discharged
(Borenstein & Feng 1994). These particular robots can be expanded effectively and for the most
part utilize different preparing units.
The particular methodology and the utilization of different handling units lead to a disseminated
framework inside a solitary robot. The framework design of those disseminated frameworks
frequently needs answers for satisfy prerequisites required in apply autonomy e.g. ongoing
limitations (Zimmerman et al. 1997). Initial one SBC is utilized as a preparing unit, and later
different SBCs for various sensors, actuators, or Human–Machine Interfaces (HMI) are included.
Not concentrating on the engineering and intending to incorporate new parts for future tasks lead
to issues coordinating those new segments. Solace highlights, similar to perception apparatuses,
could be blended in with actuators which must satisfy hard continuous requirements in one
working framework or structure, for instance, in Robot Operating System (Kleeman 1992).
Subsequently, the engineering of those dispersed frameworks inside one robot turns out to be
significantly more significant.
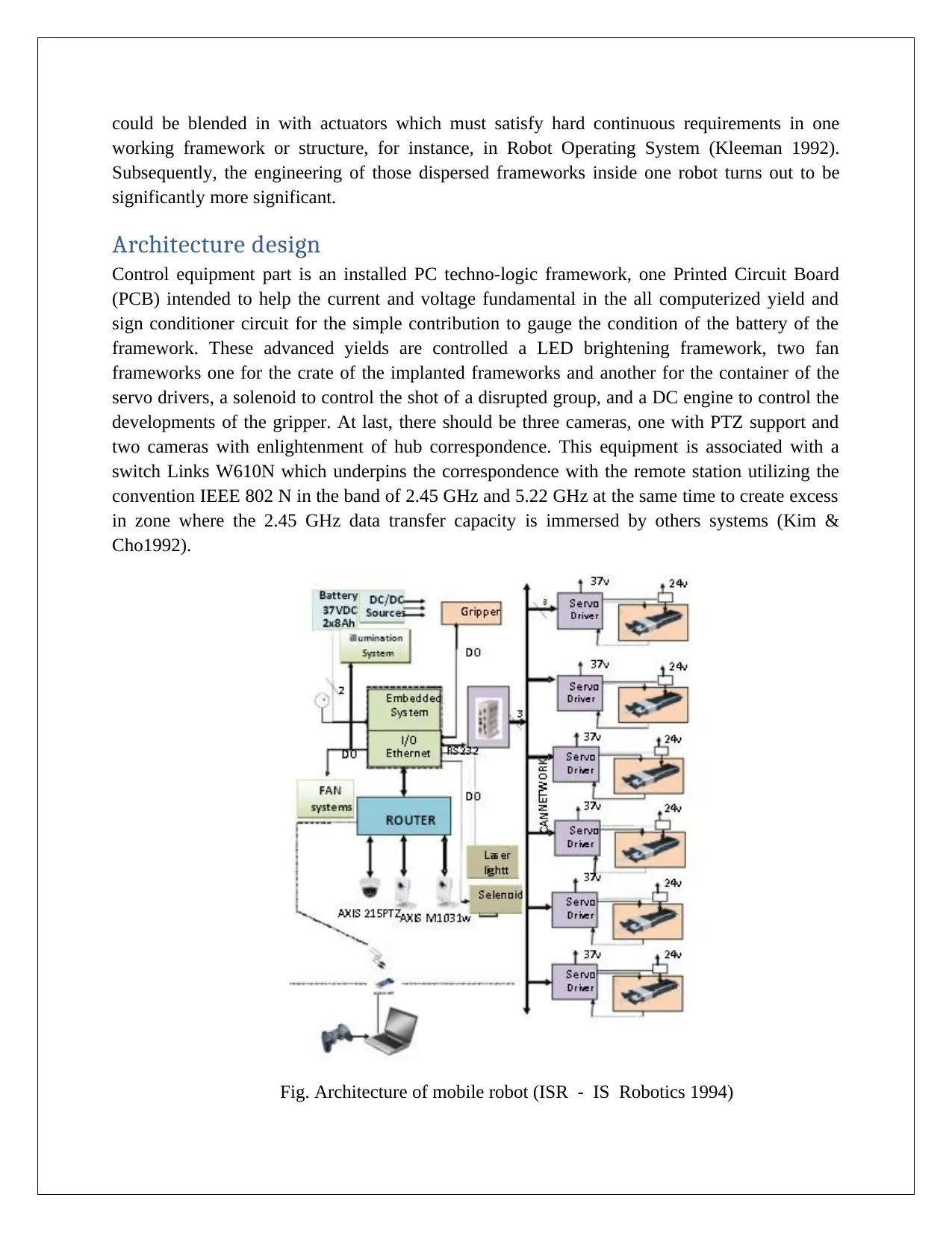
Architecture design
Control equipment part is an installed PC techno-logic framework, one Printed Circuit Board
(PCB) intended to help the current and voltage fundamental in the all computerized yield and
sign conditioner circuit for the simple contribution to gauge the condition of the battery of the
framework. These advanced yields are controlled a LED brightening framework, two fan
frameworks one for the crate of the implanted frameworks and another for the container of the
servo drivers, a solenoid to control the shot of a disrupted group, and a DC engine to control the
developments of the gripper. At last, there should be three cameras, one with PTZ support and
two cameras with enlightenment of hub correspondence. This equipment is associated with a
switch Links W610N which underpins the correspondence with the remote station utilizing the
convention IEEE 802 N in the band of 2.45 GHz and 5.22 GHz at the same time to create excess
in zone where the 2.45 GHz data transfer capacity is immersed by others systems (Kim &
Cho1992).
Fig. Architecture of mobile robot (ISR - IS Robotics 1994)
working framework or structure, for instance, in Robot Operating System (Kleeman 1992).
Subsequently, the engineering of those dispersed frameworks inside one robot turns out to be
significantly more significant.
Architecture design
Control equipment part is an installed PC techno-logic framework, one Printed Circuit Board
(PCB) intended to help the current and voltage fundamental in the all computerized yield and
sign conditioner circuit for the simple contribution to gauge the condition of the battery of the
framework. These advanced yields are controlled a LED brightening framework, two fan
frameworks one for the crate of the implanted frameworks and another for the container of the
servo drivers, a solenoid to control the shot of a disrupted group, and a DC engine to control the
developments of the gripper. At last, there should be three cameras, one with PTZ support and
two cameras with enlightenment of hub correspondence. This equipment is associated with a
switch Links W610N which underpins the correspondence with the remote station utilizing the
convention IEEE 802 N in the band of 2.45 GHz and 5.22 GHz at the same time to create excess
in zone where the 2.45 GHz data transfer capacity is immersed by others systems (Kim &
Cho1992).
Fig. Architecture of mobile robot (ISR - IS Robotics 1994)
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.
Servo engine equipment is incorporated by six servo drivers with military particular of the Elmo
Motion control in the line Hornet, which are mounted in a planned PCB by the gathering of the
undertaking with the circuit important to control the computerized yield and contribution of this
coordinated. These six servo drivers are associated with a CAN Network to a multi pivot
controller which conveys to the implanted framework through sequential port (Bar-Shalom and
Fortmann 1988).
Bolster equipment of the framework works with two batteries of 10 cell of lithium polymer that
give 37 volts and 8 ampere hour every one. These batteries are associated with the engines
legitimately, however different frameworks need 5V, 12V and 24V, so there are three DC-DC
converter which a limit of 100W every one.
Finally, remote station is a PC which has associated a gamepad to order the servomotor and
screen the entire framework with the three cameras address.
Behavior design
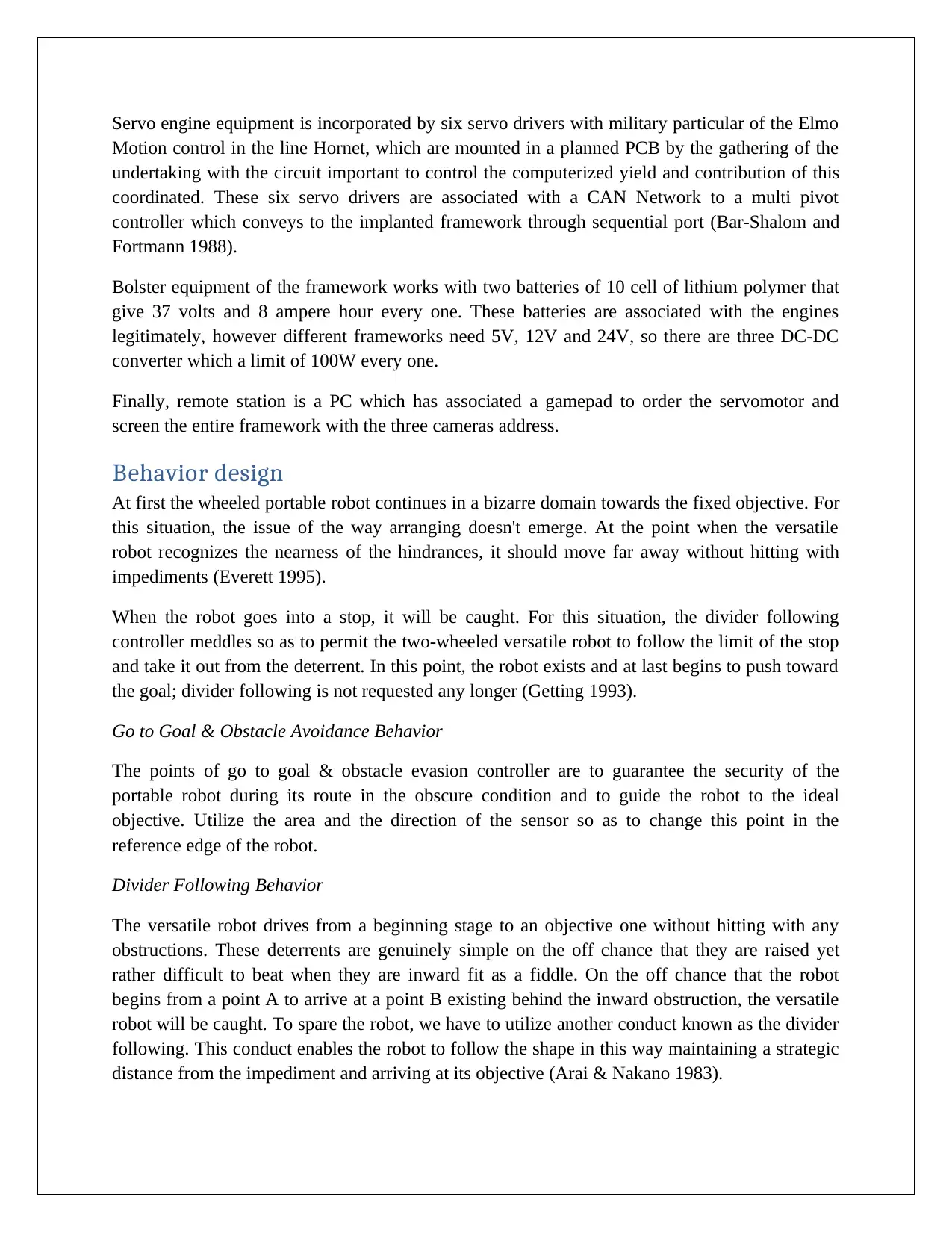
At first the wheeled portable robot continues in a bizarre domain towards the fixed objective. For
this situation, the issue of the way arranging doesn't emerge. At the point when the versatile
robot recognizes the nearness of the hindrances, it should move far away without hitting with
impediments (Everett 1995).
When the robot goes into a stop, it will be caught. For this situation, the divider following
controller meddles so as to permit the two-wheeled versatile robot to follow the limit of the stop
and take it out from the deterrent. In this point, the robot exists and at last begins to push toward
the goal; divider following is not requested any longer (Getting 1993).
Go to Goal & Obstacle Avoidance Behavior
The points of go to goal & obstacle evasion controller are to guarantee the security of the
portable robot during its route in the obscure condition and to guide the robot to the ideal
objective. Utilize the area and the direction of the sensor so as to change this point in the
reference edge of the robot.
Divider Following Behavior
The versatile robot drives from a beginning stage to an objective one without hitting with any
obstructions. These deterrents are genuinely simple on the off chance that they are raised yet
rather difficult to beat when they are inward fit as a fiddle. On the off chance that the robot
begins from a point A to arrive at a point B existing behind the inward obstruction, the versatile
robot will be caught. To spare the robot, we have to utilize another conduct known as the divider
following. This conduct enables the robot to follow the shape in this way maintaining a strategic
distance from the impediment and arriving at its objective (Arai & Nakano 1983).
Motion control in the line Hornet, which are mounted in a planned PCB by the gathering of the
undertaking with the circuit important to control the computerized yield and contribution of this
coordinated. These six servo drivers are associated with a CAN Network to a multi pivot
controller which conveys to the implanted framework through sequential port (Bar-Shalom and
Fortmann 1988).
Bolster equipment of the framework works with two batteries of 10 cell of lithium polymer that
give 37 volts and 8 ampere hour every one. These batteries are associated with the engines
legitimately, however different frameworks need 5V, 12V and 24V, so there are three DC-DC
converter which a limit of 100W every one.
Finally, remote station is a PC which has associated a gamepad to order the servomotor and
screen the entire framework with the three cameras address.
Behavior design
At first the wheeled portable robot continues in a bizarre domain towards the fixed objective. For
this situation, the issue of the way arranging doesn't emerge. At the point when the versatile
robot recognizes the nearness of the hindrances, it should move far away without hitting with
impediments (Everett 1995).
When the robot goes into a stop, it will be caught. For this situation, the divider following
controller meddles so as to permit the two-wheeled versatile robot to follow the limit of the stop
and take it out from the deterrent. In this point, the robot exists and at last begins to push toward
the goal; divider following is not requested any longer (Getting 1993).
Go to Goal & Obstacle Avoidance Behavior
The points of go to goal & obstacle evasion controller are to guarantee the security of the
portable robot during its route in the obscure condition and to guide the robot to the ideal
objective. Utilize the area and the direction of the sensor so as to change this point in the
reference edge of the robot.
Divider Following Behavior
The versatile robot drives from a beginning stage to an objective one without hitting with any
obstructions. These deterrents are genuinely simple on the off chance that they are raised yet
rather difficult to beat when they are inward fit as a fiddle. On the off chance that the robot
begins from a point A to arrive at a point B existing behind the inward obstruction, the versatile
robot will be caught. To spare the robot, we have to utilize another conduct known as the divider
following. This conduct enables the robot to follow the shape in this way maintaining a strategic
distance from the impediment and arriving at its objective (Arai & Nakano 1983).
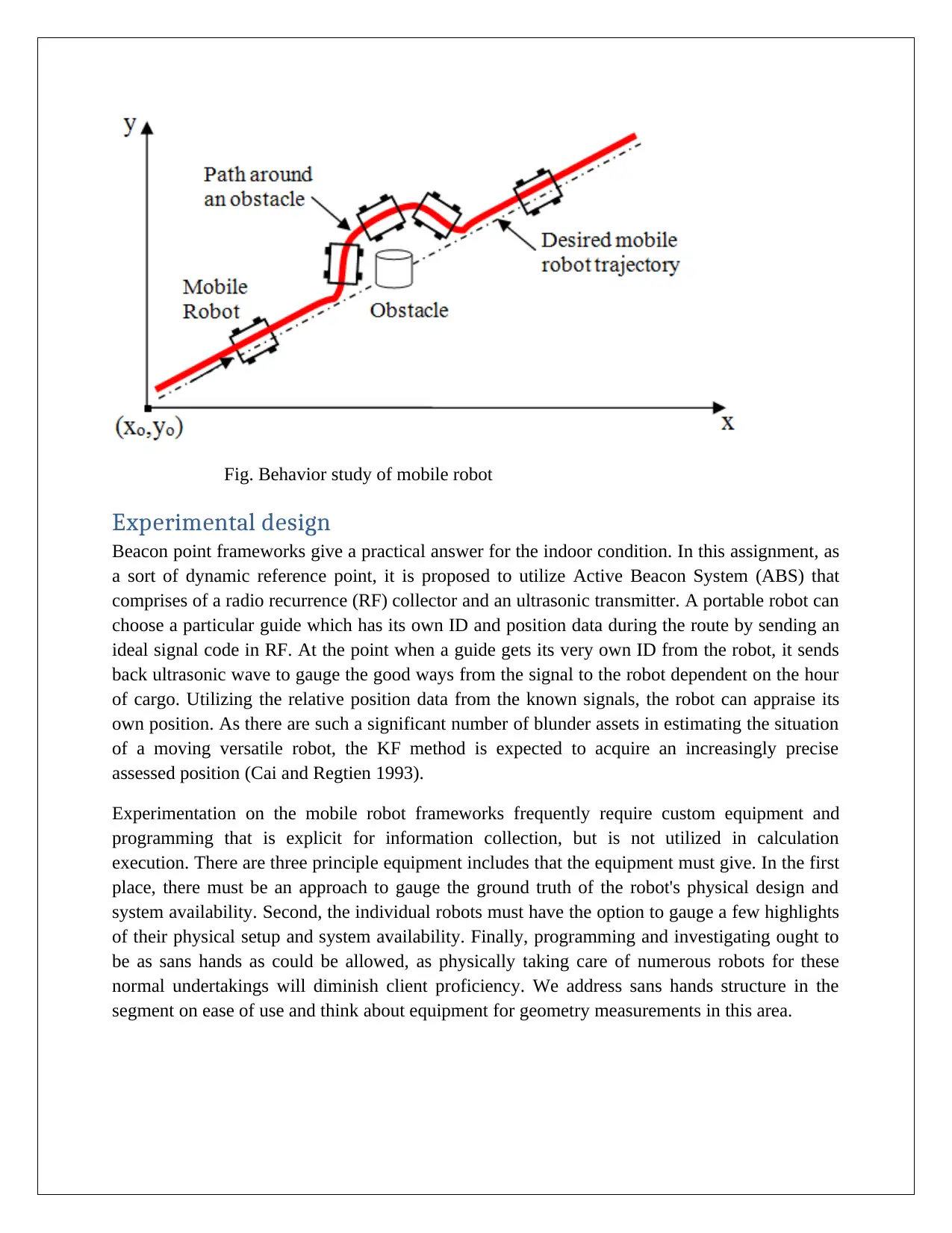
Fig. Behavior study of mobile robot
Experimental design
Beacon point frameworks give a practical answer for the indoor condition. In this assignment, as
a sort of dynamic reference point, it is proposed to utilize Active Beacon System (ABS) that
comprises of a radio recurrence (RF) collector and an ultrasonic transmitter. A portable robot can
choose a particular guide which has its own ID and position data during the route by sending an
ideal signal code in RF. At the point when a guide gets its very own ID from the robot, it sends
back ultrasonic wave to gauge the good ways from the signal to the robot dependent on the hour
of cargo. Utilizing the relative position data from the known signals, the robot can appraise its
own position. As there are such a significant number of blunder assets in estimating the situation
of a moving versatile robot, the KF method is expected to acquire an increasingly precise
assessed position (Cai and Regtien 1993).
Experimentation on the mobile robot frameworks frequently require custom equipment and
programming that is explicit for information collection, but is not utilized in calculation
execution. There are three principle equipment includes that the equipment must give. In the first
place, there must be an approach to gauge the ground truth of the robot's physical design and
system availability. Second, the individual robots must have the option to gauge a few highlights
of their physical setup and system availability. Finally, programming and investigating ought to
be as sans hands as could be allowed, as physically taking care of numerous robots for these
normal undertakings will diminish client proficiency. We address sans hands structure in the
segment on ease of use and think about equipment for geometry measurements in this area.
Experimental design
Beacon point frameworks give a practical answer for the indoor condition. In this assignment, as
a sort of dynamic reference point, it is proposed to utilize Active Beacon System (ABS) that
comprises of a radio recurrence (RF) collector and an ultrasonic transmitter. A portable robot can
choose a particular guide which has its own ID and position data during the route by sending an
ideal signal code in RF. At the point when a guide gets its very own ID from the robot, it sends
back ultrasonic wave to gauge the good ways from the signal to the robot dependent on the hour
of cargo. Utilizing the relative position data from the known signals, the robot can appraise its
own position. As there are such a significant number of blunder assets in estimating the situation
of a moving versatile robot, the KF method is expected to acquire an increasingly precise
assessed position (Cai and Regtien 1993).
Experimentation on the mobile robot frameworks frequently require custom equipment and
programming that is explicit for information collection, but is not utilized in calculation
execution. There are three principle equipment includes that the equipment must give. In the first
place, there must be an approach to gauge the ground truth of the robot's physical design and
system availability. Second, the individual robots must have the option to gauge a few highlights
of their physical setup and system availability. Finally, programming and investigating ought to
be as sans hands as could be allowed, as physically taking care of numerous robots for these
normal undertakings will diminish client proficiency. We address sans hands structure in the
segment on ease of use and think about equipment for geometry measurements in this area.
Results
Task 1
The map is formed of boundary walls and a room in the center of the map with a doorway as
shown in figure below
The robot is placed at the corner of the room as shown in the figure below
Task 1
The map is formed of boundary walls and a room in the center of the map with a doorway as
shown in figure below
The robot is placed at the corner of the room as shown in the figure below
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
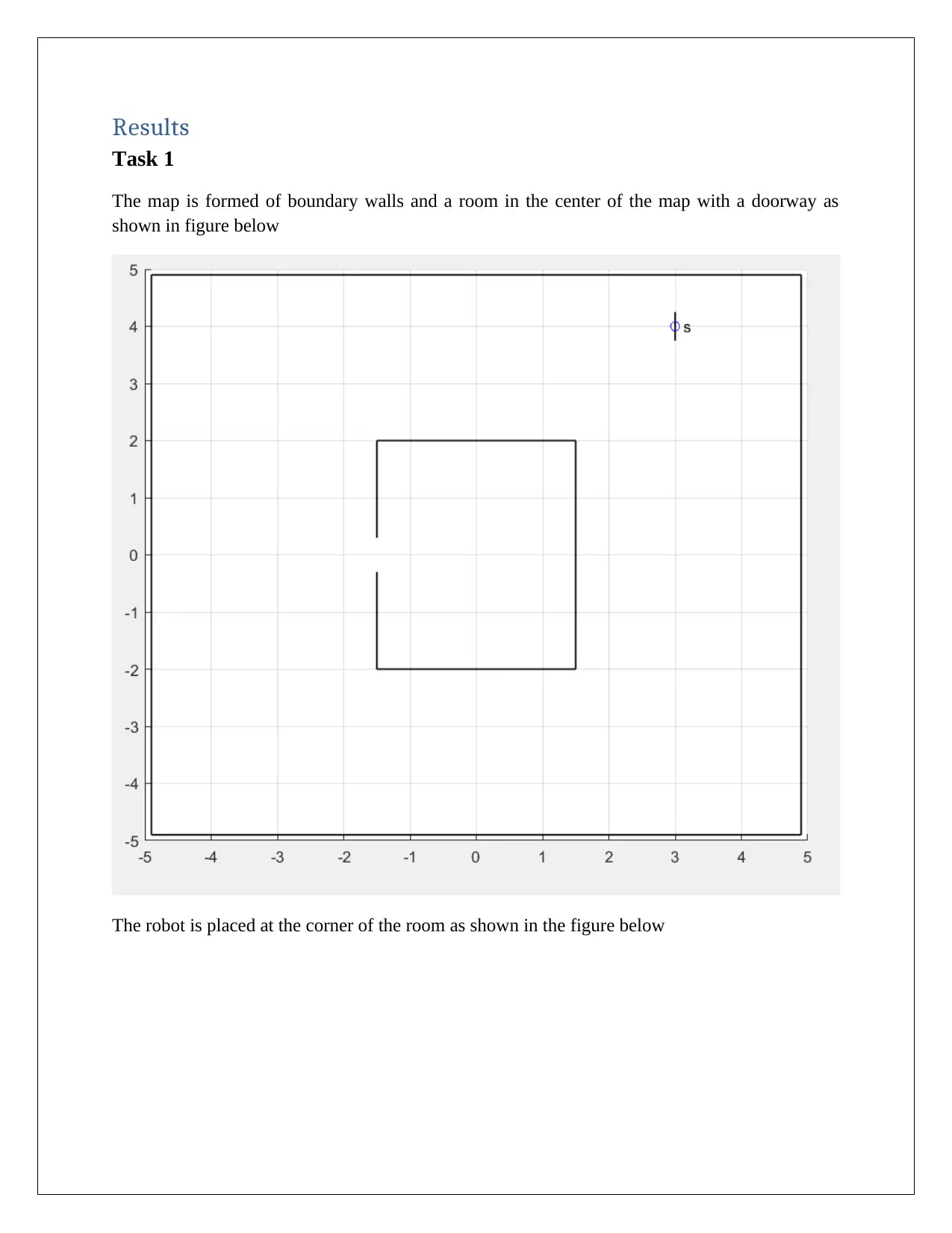
The robot should start exploring the environment to find the beacon, avoiding objects. A beacon
b1 is placed in the environment as shown in the figure
b1 is placed in the environment as shown in the figure
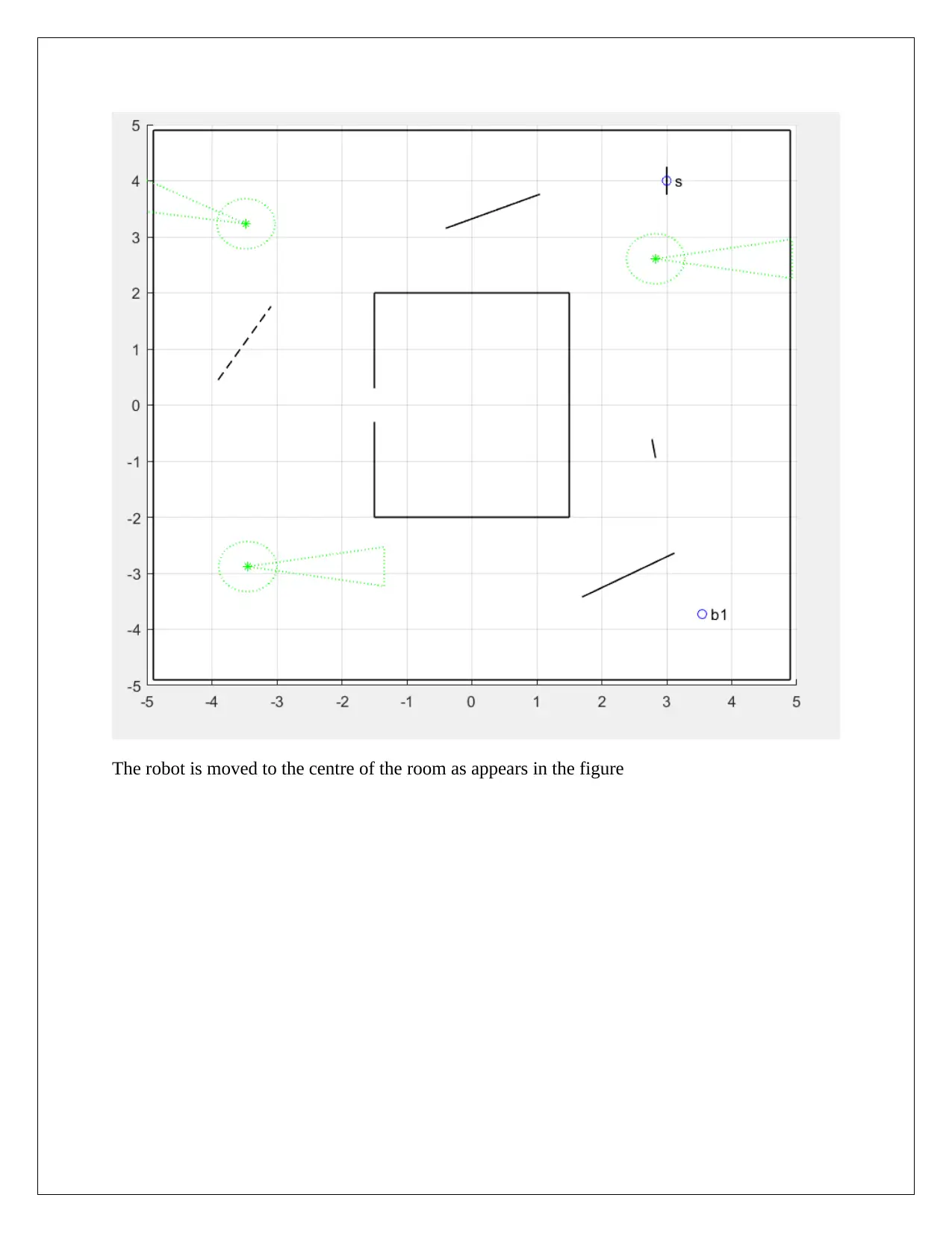
The robot is moved to the centre of the room as appears in the figure
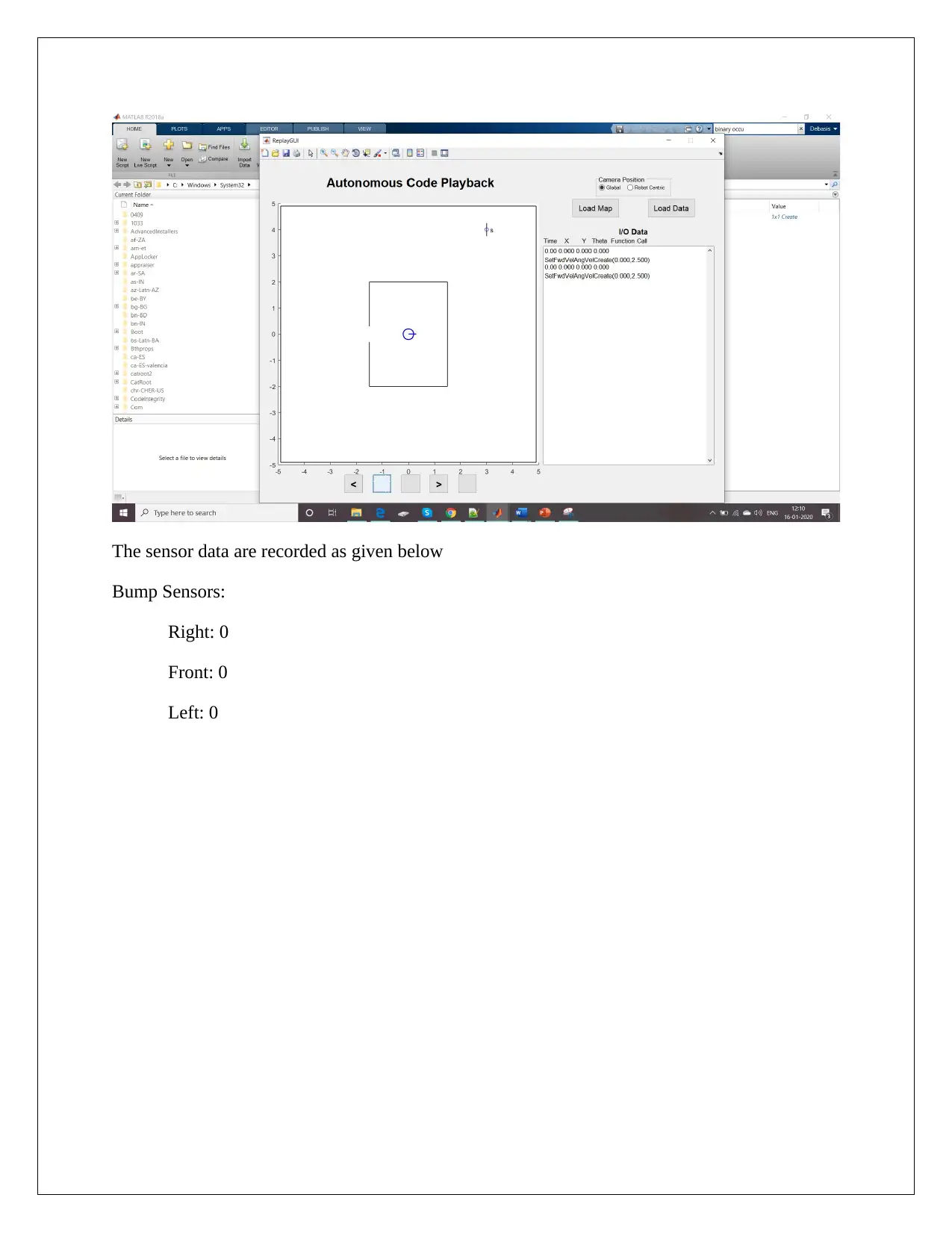
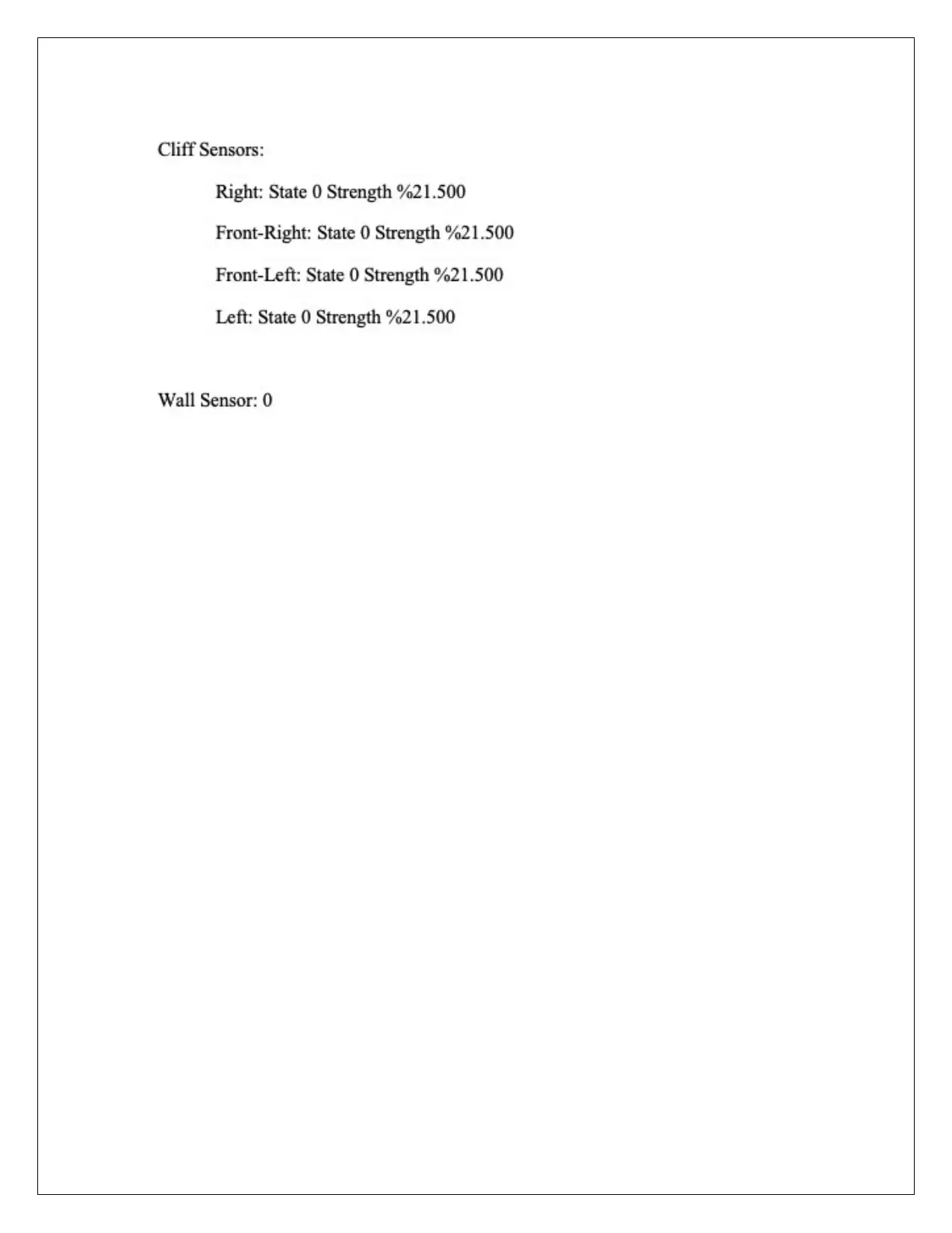
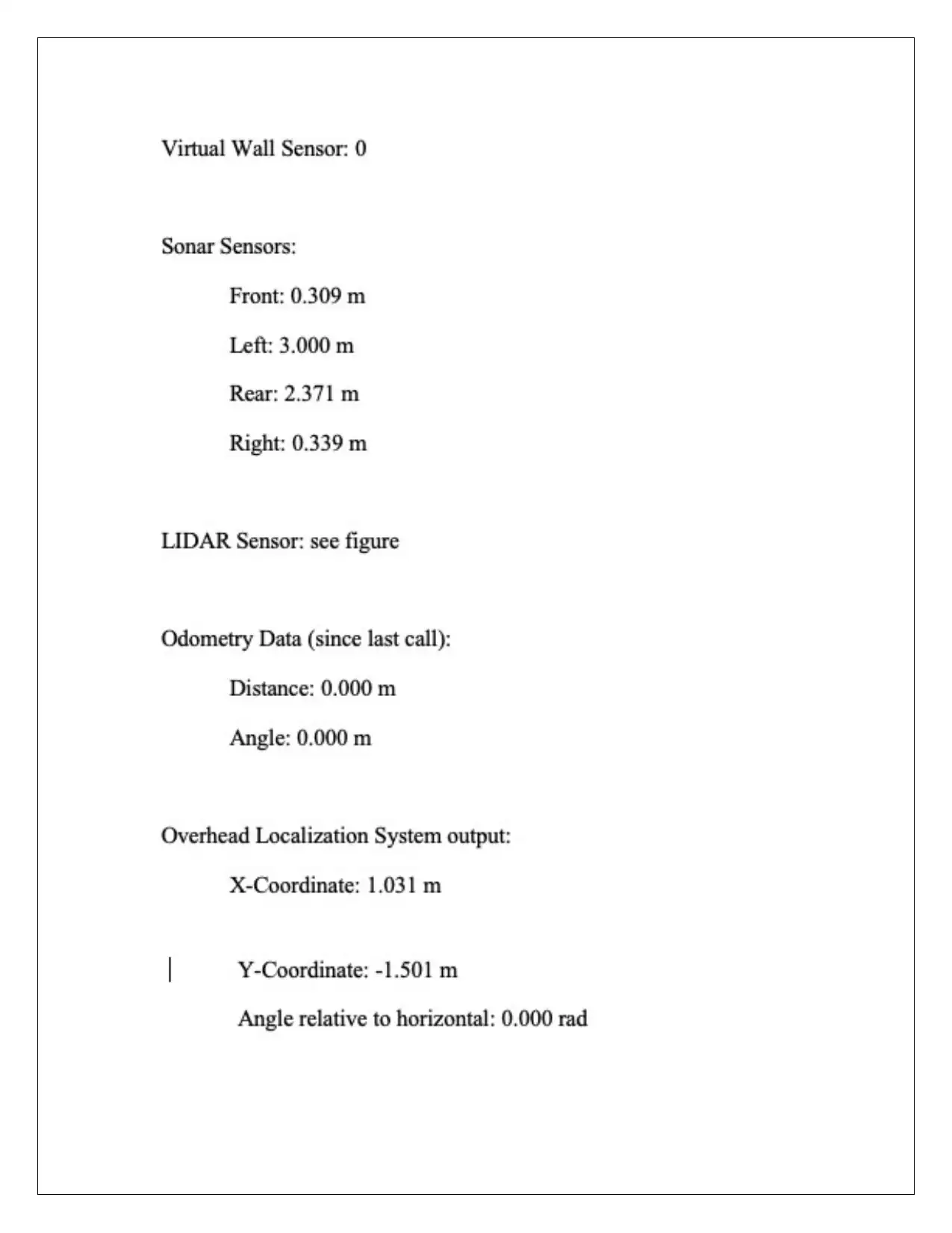
The sensor data are recorded as given below
Bump Sensors:
Right: 0
Front: 0
Left: 0
Bump Sensors:
Right: 0
Front: 0
Left: 0
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.
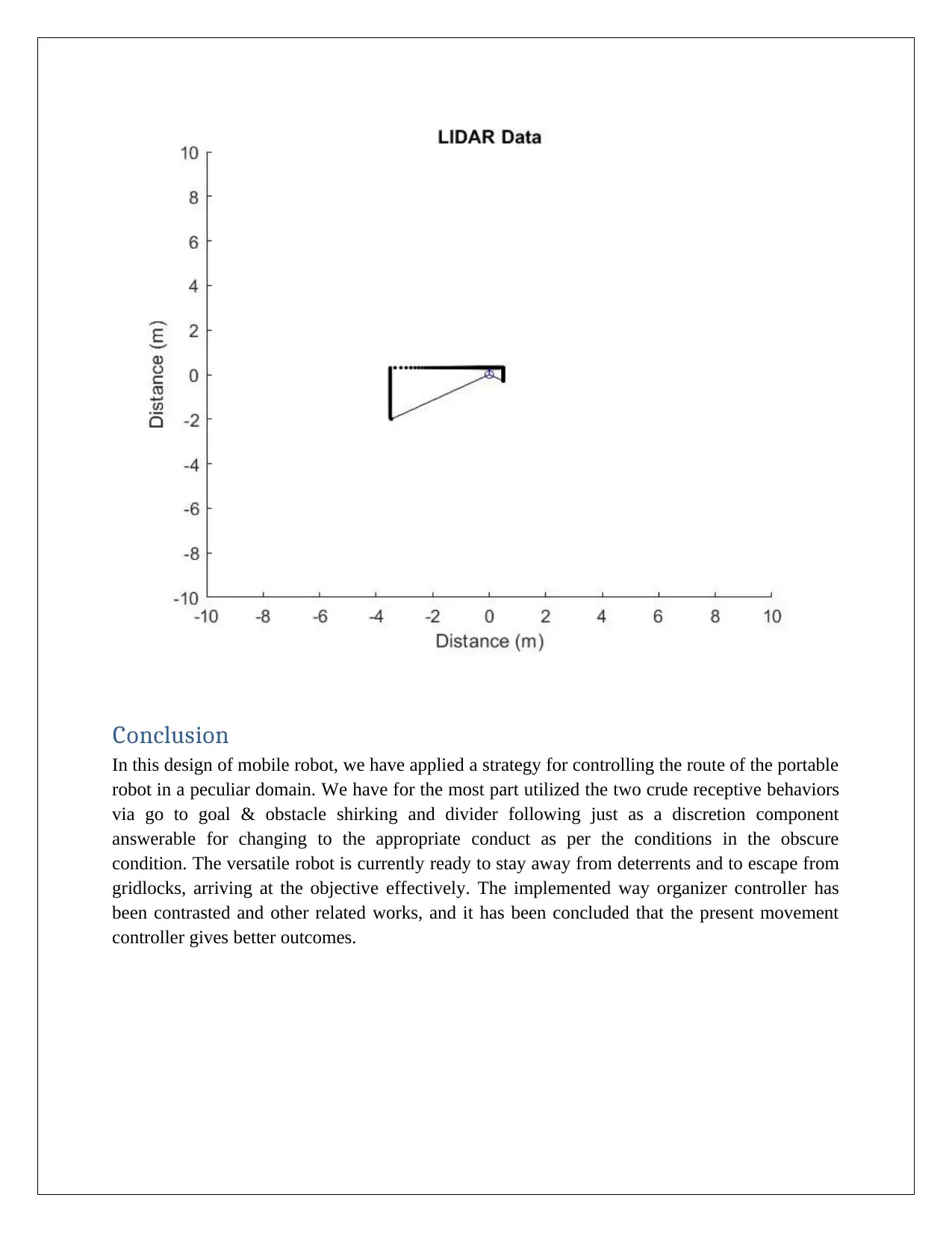
Conclusion
In this design of mobile robot, we have applied a strategy for controlling the route of the portable
robot in a peculiar domain. We have for the most part utilized the two crude receptive behaviors
via go to goal & obstacle shirking and divider following just as a discretion component
answerable for changing to the appropriate conduct as per the conditions in the obscure
condition. The versatile robot is currently ready to stay away from deterrents and to escape from
gridlocks, arriving at the objective effectively. The implemented way organizer controller has
been contrasted and other related works, and it has been concluded that the present movement
controller gives better outcomes.
In this design of mobile robot, we have applied a strategy for controlling the route of the portable
robot in a peculiar domain. We have for the most part utilized the two crude receptive behaviors
via go to goal & obstacle shirking and divider following just as a discretion component
answerable for changing to the appropriate conduct as per the conditions in the obscure
condition. The versatile robot is currently ready to stay away from deterrents and to escape from
gridlocks, arriving at the objective effectively. The implemented way organizer controller has
been contrasted and other related works, and it has been concluded that the present movement
controller gives better outcomes.
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
References:
Arai, T., Nakano, E. (1983). Development of measuring equipment for location and direction
(MELODI) using ultrasonic waves. Trans. ASME. Journal of dynamic systems Measurement and
control, 152–156.
Borenstein, J., Feng, L. (1994). A Method for Measuring, Comparing, and Correcting Dead-
reckoning Errors in Mobile Robots. The University of Michigan. Technical Report UM-MEAM-
94-22.
Bar-Shalom, Y., and Fortmann, T.E., (1988). Tracking and Data Association. Academic Press.
Borenstein, J., Everett, H. R., and Feng, L., (1996). Navigating Mobile Robots: Sensors
and Techniques,Wellesley, MA: A. K. Peters, Ltd.
Clark, C.M., Rock, S.M., Latombe, J.C. (2003). Motion Planning for Multiple Mobile Robot
Systems Using Dynamic Networks. IEEE Int. Conference on Robotics and Automation, Taipei,
Taiwan.
Cai, C., and Regtien, P.L. (1993). Accurate Digital time-of-flight Measurements using
Self-Interference. IEEE Transactions on Instrumentation and Measurement. Vol.42, No. 6.
pp.990-994.
Everett, H.R. (1995). Understanding Ultrasonic Ranging Sensors. The Robotics Practitioner.
Fall, pp. 27-38.
Fletcher, R. (1987). Practical methods of optimization (secondedition). New York, NJ: J. Wiley
& Sons, Ltd.
Getting, I. A. (1993). The Global Positioning System. IEEESpectrum, December, pp. 36-47
ISR - IS Robotics, Inc., (1994). RR-1/BS-1 System forCommunications and Positioning -
Preliminary Data Sheet. IS Robotics, Twin City Office Center, Suite 6, 22 McGrathHighway,
Somerville, MA 02143, 617-629-0055.
Kleeman, L. (1992). Optimal estimation of position and heading for mobile robots using
ultrasonic beacons and dead reckoning. IEEE International conference on Robotics and
Automation, May 1992, pp. 2582–2587.
Kim, J.H., Cho, H.S. (1992). Real time determination of a mobile robot‘s position by linear
scanning of a landmark. In: Robotica, vol. 10, pp. 309–319.
Zimmerman, et al. (1997). Experimental Development of an Indoor GPS Based sensing system
for Robotic Applications. Navigation, 43(4), 375–395.
Arai, T., Nakano, E. (1983). Development of measuring equipment for location and direction
(MELODI) using ultrasonic waves. Trans. ASME. Journal of dynamic systems Measurement and
control, 152–156.
Borenstein, J., Feng, L. (1994). A Method for Measuring, Comparing, and Correcting Dead-
reckoning Errors in Mobile Robots. The University of Michigan. Technical Report UM-MEAM-
94-22.
Bar-Shalom, Y., and Fortmann, T.E., (1988). Tracking and Data Association. Academic Press.
Borenstein, J., Everett, H. R., and Feng, L., (1996). Navigating Mobile Robots: Sensors
and Techniques,Wellesley, MA: A. K. Peters, Ltd.
Clark, C.M., Rock, S.M., Latombe, J.C. (2003). Motion Planning for Multiple Mobile Robot
Systems Using Dynamic Networks. IEEE Int. Conference on Robotics and Automation, Taipei,
Taiwan.
Cai, C., and Regtien, P.L. (1993). Accurate Digital time-of-flight Measurements using
Self-Interference. IEEE Transactions on Instrumentation and Measurement. Vol.42, No. 6.
pp.990-994.
Everett, H.R. (1995). Understanding Ultrasonic Ranging Sensors. The Robotics Practitioner.
Fall, pp. 27-38.
Fletcher, R. (1987). Practical methods of optimization (secondedition). New York, NJ: J. Wiley
& Sons, Ltd.
Getting, I. A. (1993). The Global Positioning System. IEEESpectrum, December, pp. 36-47
ISR - IS Robotics, Inc., (1994). RR-1/BS-1 System forCommunications and Positioning -
Preliminary Data Sheet. IS Robotics, Twin City Office Center, Suite 6, 22 McGrathHighway,
Somerville, MA 02143, 617-629-0055.
Kleeman, L. (1992). Optimal estimation of position and heading for mobile robots using
ultrasonic beacons and dead reckoning. IEEE International conference on Robotics and
Automation, May 1992, pp. 2582–2587.
Kim, J.H., Cho, H.S. (1992). Real time determination of a mobile robot‘s position by linear
scanning of a landmark. In: Robotica, vol. 10, pp. 309–319.
Zimmerman, et al. (1997). Experimental Development of an Indoor GPS Based sensing system
for Robotic Applications. Navigation, 43(4), 375–395.
Appendix:
1 out of 15
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
© 2024 | Zucol Services PVT LTD | All rights reserved.