Adaptation of Insect Tripod Gait for Robotics: A Review
VerifiedAdded on 2023/06/10
|12
|2828
|342
Report
AI Summary
This report delves into the biological inspiration behind robotic locomotion, focusing on the tripod gait of insects and its adaptation for robots. It begins with an introduction to the benefits of this gait, emphasizing its efficiency and stability in various terrains. The report examines the physical and sensory anatomy of insect legs, particularly highlighting the role of sensory organs in detecting movement and adapting to the environment. It then explores different approaches to robot design, including sensor-based and sensor-less methods, and discusses the advantages of tripod gait in hexapod robots. Furthermore, it explores the relevance of insects to human well-being, including pollination and the production of honey. The report also analyzes the gait mechanism and how it has been modeled mechanically through the universe kinematics through transfer phase and supports the phases, the CPG mechanism has been modified mechanically to control each locomotive stride and simply control the gait transition. Finally, the report concludes by highlighting the significant impact of the tripod gait on robotics, emphasizing its potential for future developments in the field and its benefits to mankind, including advances in medicine and food sources. The report is based on scientific journal articles and published books.

INSECTS’ TRIPOD-GAIT AND ITS ADAPTATION FOR ROBOTS
Name
Institution
Instructor
Course
Name
Institution
Instructor
Course
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
2
Introduction
In the recent years, a researcher in the field of robotics has been attempting to improve
the robotic locomotion especially in flight and walking. Modeling robots walking on insect have
the ability to have efficient and real-time motion with minimal computational supervision which
is termed as a major advantage. The ability of robotics to maintain locomotion with minimal
computational power has greatly been adopted in small autonomous hexapod robotics because
they contain their own computational targets. According to a recent research conducted it has
been confirmed that robotics gaits which are made based on biological schemes show great
responses to the gait trepidations which are caused by the environment or surrounding which
includes holes and objects in the robots way. Insects have been related to humankind by various
aspect which is either beneficial or harmful. Insects are termed as beneficial biological control
agents. They help in pollination as well as the production of honey which has some health
benefits to the human beings. On the other hand, the insect is termed as a pest which can destroy
agricultural products causing a lot of loses to the farmers. The nature of their lifestyle has helped
human being for the understanding of mechanical robots simply because of their tripod gait
walking mechanism. The world would have different if the insect were not present despite their
harmful effects as a pest. Insect inhabits various means of locomotion which can be aerial
locomotion in which they can fly and terrestrial locomotion. Their six-legged body structure
enables them to adopt this locomotion mechanism (Chen, Jin & Chen, 2017, p.1401). Been such
stable with their six-legged body structure and having an easy way to walk many researchers in
the world of robots have adopted their walking style as an appropriate model for robots. Just like
an insect, many other hexapod species have to need able to adopt this tripod-walking gait.
Introduction
In the recent years, a researcher in the field of robotics has been attempting to improve
the robotic locomotion especially in flight and walking. Modeling robots walking on insect have
the ability to have efficient and real-time motion with minimal computational supervision which
is termed as a major advantage. The ability of robotics to maintain locomotion with minimal
computational power has greatly been adopted in small autonomous hexapod robotics because
they contain their own computational targets. According to a recent research conducted it has
been confirmed that robotics gaits which are made based on biological schemes show great
responses to the gait trepidations which are caused by the environment or surrounding which
includes holes and objects in the robots way. Insects have been related to humankind by various
aspect which is either beneficial or harmful. Insects are termed as beneficial biological control
agents. They help in pollination as well as the production of honey which has some health
benefits to the human beings. On the other hand, the insect is termed as a pest which can destroy
agricultural products causing a lot of loses to the farmers. The nature of their lifestyle has helped
human being for the understanding of mechanical robots simply because of their tripod gait
walking mechanism. The world would have different if the insect were not present despite their
harmful effects as a pest. Insect inhabits various means of locomotion which can be aerial
locomotion in which they can fly and terrestrial locomotion. Their six-legged body structure
enables them to adopt this locomotion mechanism (Chen, Jin & Chen, 2017, p.1401). Been such
stable with their six-legged body structure and having an easy way to walk many researchers in
the world of robots have adopted their walking style as an appropriate model for robots. Just like
an insect, many other hexapod species have to need able to adopt this tripod-walking gait.
3
Tripod-Walking Gait
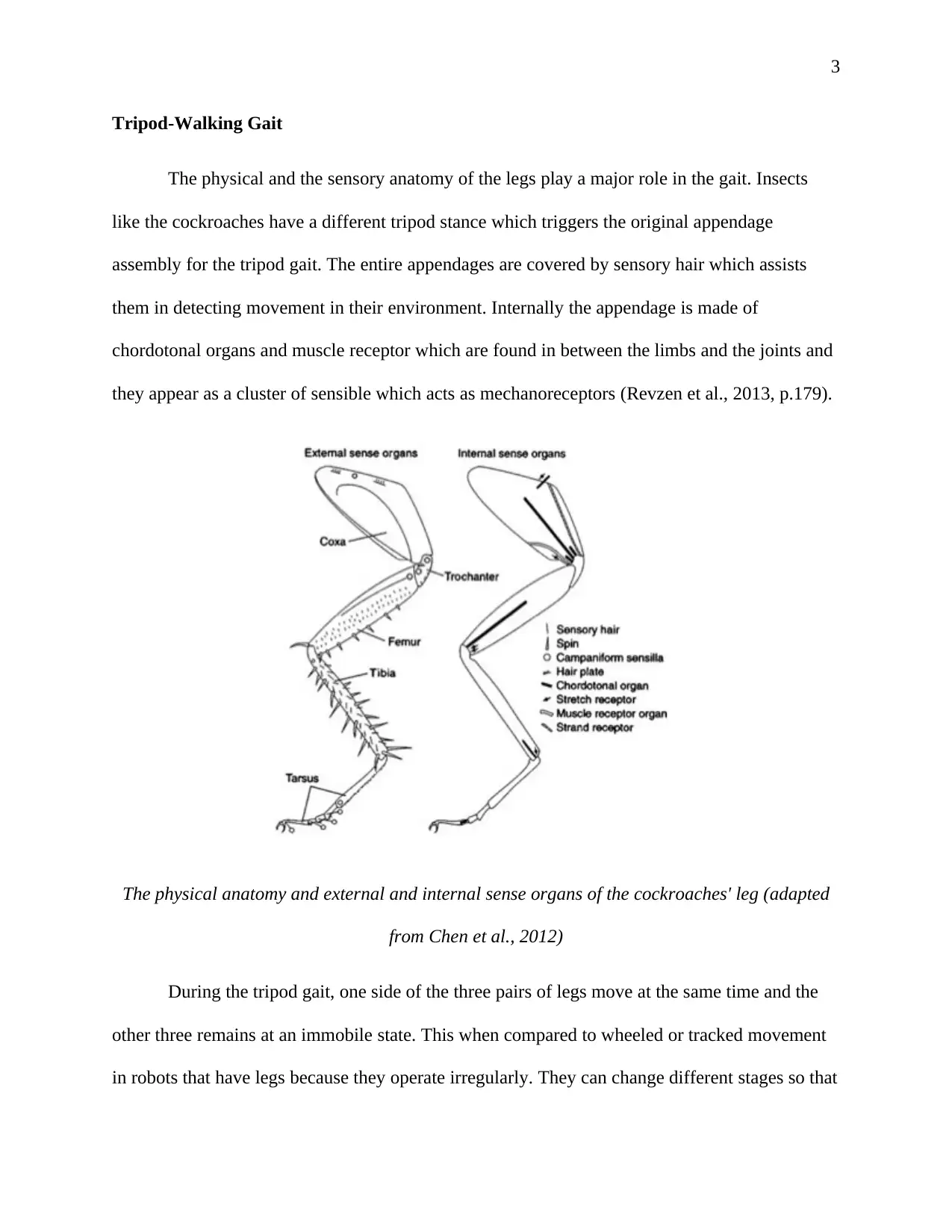
The physical and the sensory anatomy of the legs play a major role in the gait. Insects
like the cockroaches have a different tripod stance which triggers the original appendage
assembly for the tripod gait. The entire appendages are covered by sensory hair which assists
them in detecting movement in their environment. Internally the appendage is made of
chordotonal organs and muscle receptor which are found in between the limbs and the joints and
they appear as a cluster of sensible which acts as mechanoreceptors (Revzen et al., 2013, p.179).
The physical anatomy and external and internal sense organs of the cockroaches' leg (adapted
from Chen et al., 2012)
During the tripod gait, one side of the three pairs of legs move at the same time and the
other three remains at an immobile state. This when compared to wheeled or tracked movement
in robots that have legs because they operate irregularly. They can change different stages so that
Tripod-Walking Gait
The physical and the sensory anatomy of the legs play a major role in the gait. Insects
like the cockroaches have a different tripod stance which triggers the original appendage
assembly for the tripod gait. The entire appendages are covered by sensory hair which assists
them in detecting movement in their environment. Internally the appendage is made of
chordotonal organs and muscle receptor which are found in between the limbs and the joints and
they appear as a cluster of sensible which acts as mechanoreceptors (Revzen et al., 2013, p.179).
The physical anatomy and external and internal sense organs of the cockroaches' leg (adapted
from Chen et al., 2012)
During the tripod gait, one side of the three pairs of legs move at the same time and the
other three remains at an immobile state. This when compared to wheeled or tracked movement
in robots that have legs because they operate irregularly. They can change different stages so that
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
4
they can compensate for the irregular terrains. Robots with legs and methods of detection and
correction of events are highly recommended in cases where the risk of slippage is highly
expected. This is because when one leg slips it can affect the entire robot locomotion and hence
it requires some correction in the whole gait. There are two approaches which are highly
recommended in the design of an effective hexapod robot propulsion (Nolfi et al., 2016, p.2035).
The first approach is built on the belief that no existing knowledge exists on terrain that the robot
travels and it highly depends on a reliable design in the gait with negligible sensing. For this
approach to be successful the robot should have the capacity to endure tripping and slippage
without amendment and it also depends purely on the gait pattern (Grzelczyk, Stanczyk &
Awrejcewicz, 2017, p.1740010). This approach makes the robot more susceptible to risky
environments which include steep and slippery terrains. The second techniques of designing
robots involve equipping them with sensors and thus allowing them to familiarize with their
surroundings. The footfalls need to be estimated to give maximum efficiency with reduced errors
and maximum stability. A hexapod insect tends to use tripod gait when it is waling at a rapid
speed (Zhu et al., 2017, p.125). Hexapod insects use ripple gait at a moderate speed and wave
gait at low speed. Among the three gait, tripod gait is the most recommended which is adopted
by hexapod robots as a result of its fast speed and stability. This is because with three legs at the
ground all the time tripod gait has high stability (Dev, 2017). If an insect with six legs losses a
leg it is still capable of successfully navigating through difficult terrain. In some stage of an
insect life cycle, it has to demonstrate this walking mechanism.
they can compensate for the irregular terrains. Robots with legs and methods of detection and
correction of events are highly recommended in cases where the risk of slippage is highly
expected. This is because when one leg slips it can affect the entire robot locomotion and hence
it requires some correction in the whole gait. There are two approaches which are highly
recommended in the design of an effective hexapod robot propulsion (Nolfi et al., 2016, p.2035).
The first approach is built on the belief that no existing knowledge exists on terrain that the robot
travels and it highly depends on a reliable design in the gait with negligible sensing. For this
approach to be successful the robot should have the capacity to endure tripping and slippage
without amendment and it also depends purely on the gait pattern (Grzelczyk, Stanczyk &
Awrejcewicz, 2017, p.1740010). This approach makes the robot more susceptible to risky
environments which include steep and slippery terrains. The second techniques of designing
robots involve equipping them with sensors and thus allowing them to familiarize with their
surroundings. The footfalls need to be estimated to give maximum efficiency with reduced errors
and maximum stability. A hexapod insect tends to use tripod gait when it is waling at a rapid
speed (Zhu et al., 2017, p.125). Hexapod insects use ripple gait at a moderate speed and wave
gait at low speed. Among the three gait, tripod gait is the most recommended which is adopted
by hexapod robots as a result of its fast speed and stability. This is because with three legs at the
ground all the time tripod gait has high stability (Dev, 2017). If an insect with six legs losses a
leg it is still capable of successfully navigating through difficult terrain. In some stage of an
insect life cycle, it has to demonstrate this walking mechanism.
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser

5
Modified PhantomX hexapod with additional computing and sensing (Hörger et al., Year
Unknown)
According to Kottege et al., (2015) recent research which has been conducted, a high
number of insects has become adaptive to various practical roles of the tripod gait. The gait is
primarily executed in the same way as the human sensory manner. Before taking each step
human beings makes sure the steps don’t land them in harsh surrounding which insects do as
well in a manner that the sensory organs on the other end of their tarsus ensure that the
surrounding is safe for the next stride. However, a number of insects do not require sensory input
for the gait mechanism as they are functionally adapted to fit in some environments. This has
enabled cockroaches to run in a high speed by applying high forces when unveiling the tripod
gait mechanism (Kottege et al., 2015, p.5140). Most insect require sensory mechanism which
enables them to retort from the substrate they are on prior to making their next step.
Modified PhantomX hexapod with additional computing and sensing (Hörger et al., Year
Unknown)
According to Kottege et al., (2015) recent research which has been conducted, a high
number of insects has become adaptive to various practical roles of the tripod gait. The gait is
primarily executed in the same way as the human sensory manner. Before taking each step
human beings makes sure the steps don’t land them in harsh surrounding which insects do as
well in a manner that the sensory organs on the other end of their tarsus ensure that the
surrounding is safe for the next stride. However, a number of insects do not require sensory input
for the gait mechanism as they are functionally adapted to fit in some environments. This has
enabled cockroaches to run in a high speed by applying high forces when unveiling the tripod
gait mechanism (Kottege et al., 2015, p.5140). Most insect require sensory mechanism which
enables them to retort from the substrate they are on prior to making their next step.
6
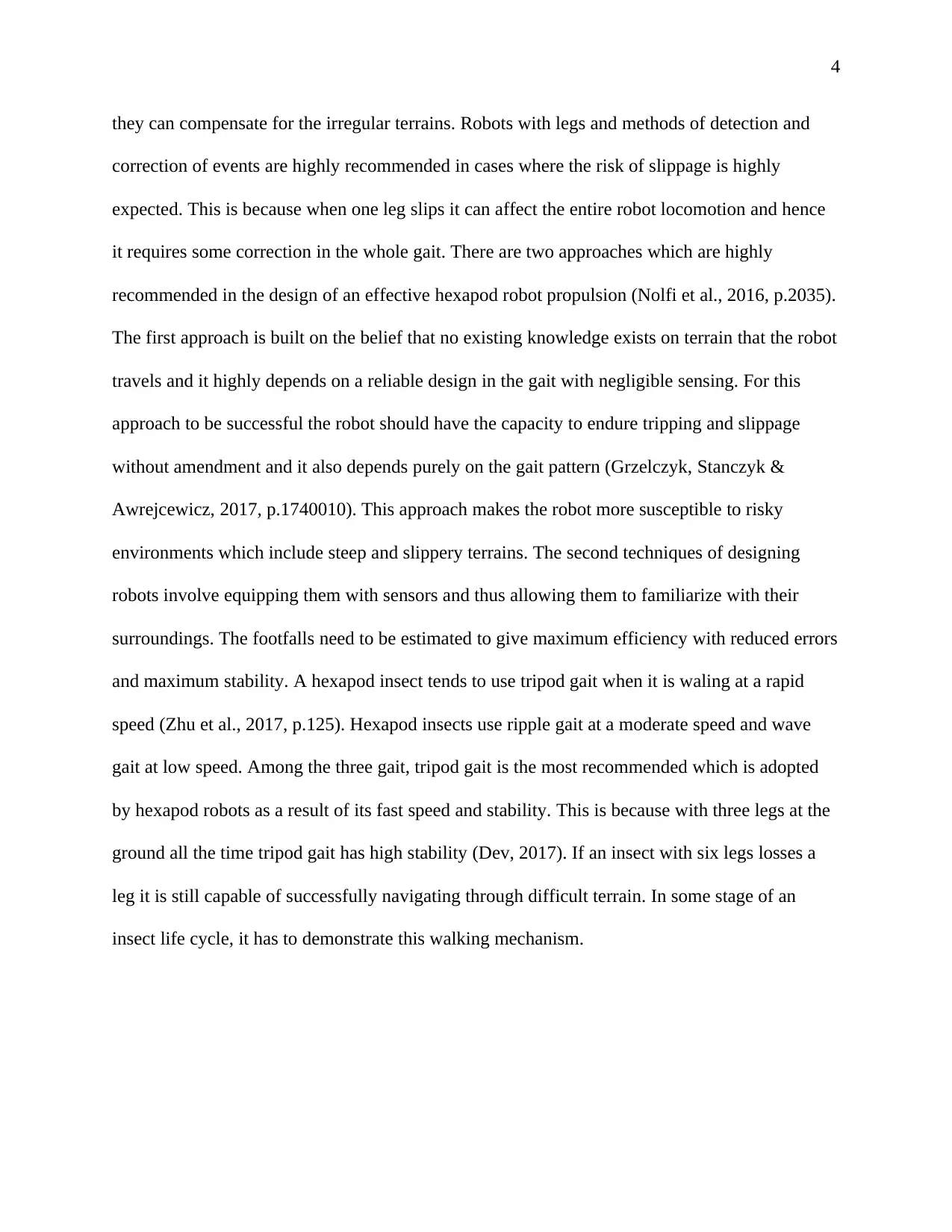
Alexander Wild, 2012
Cockroaches have the ability to move for long distances without the requirement of
sensory mechanism are able to move long distances without the need of sensory mechanism on
their appendages due to the fact that they have a low sensory feedback as compared to the
cockroach pace of swiftness (Sato & Inoue, 2015, p.185). This has enabled this kind of insects to
be in position to move at very high speed and turn quick corners especially when they are
running away from their predators or when they want to catch their prey (Duan et al., 2018,
p.68). This ability of cockroaches to gait at fast speed has impacted and motivated scientists in
the world of robotics to design robots whose structures are based on biomechanics of the six-
legged configuration. The nervous system of the cockroach applies a major role in locomotion
most specifically during lateral perturbation (Cully et al., 2015, p.503).
Alexander Wild, 2012
Cockroaches have the ability to move for long distances without the requirement of
sensory mechanism are able to move long distances without the need of sensory mechanism on
their appendages due to the fact that they have a low sensory feedback as compared to the
cockroach pace of swiftness (Sato & Inoue, 2015, p.185). This has enabled this kind of insects to
be in position to move at very high speed and turn quick corners especially when they are
running away from their predators or when they want to catch their prey (Duan et al., 2018,
p.68). This ability of cockroaches to gait at fast speed has impacted and motivated scientists in
the world of robotics to design robots whose structures are based on biomechanics of the six-
legged configuration. The nervous system of the cockroach applies a major role in locomotion
most specifically during lateral perturbation (Cully et al., 2015, p.503).
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
7
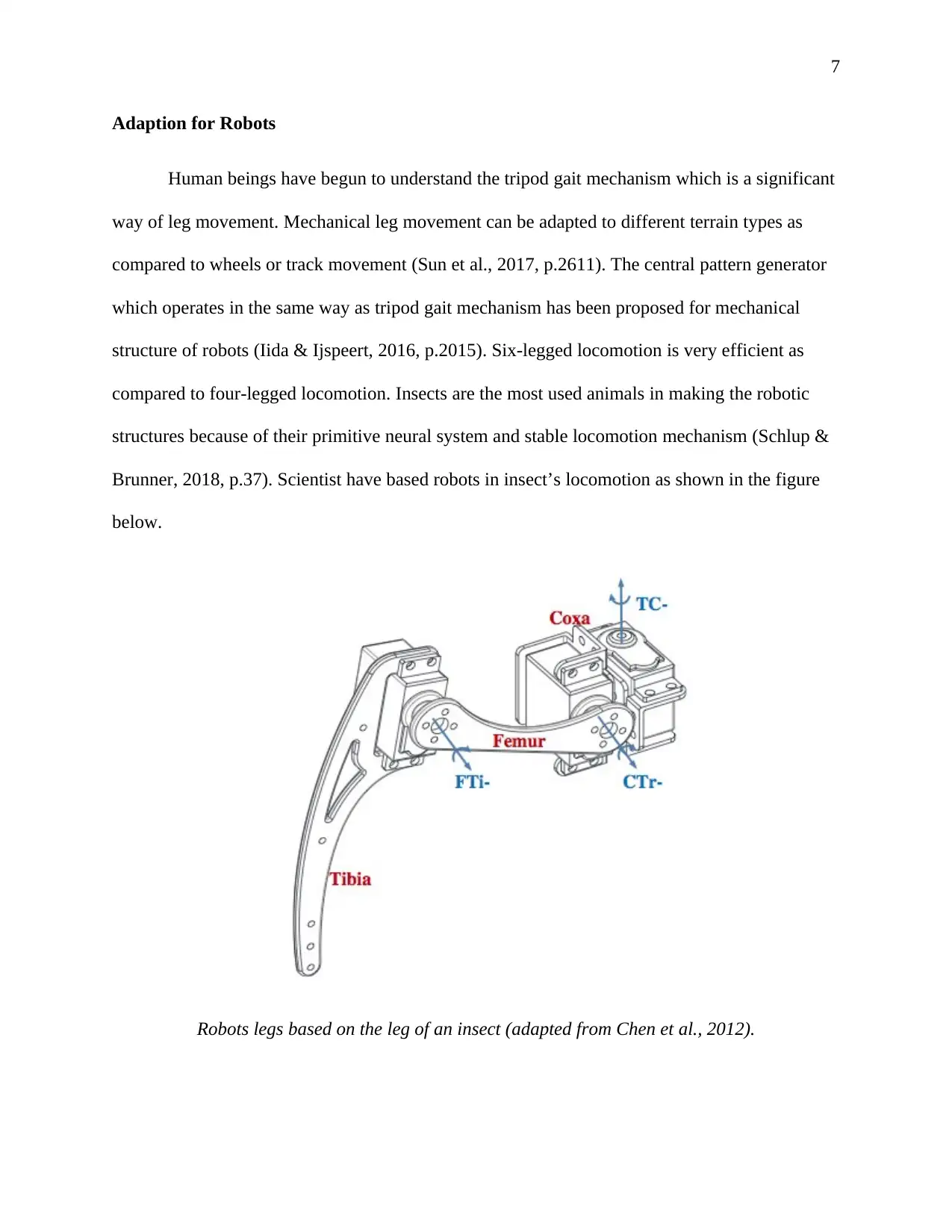
Adaption for Robots
Human beings have begun to understand the tripod gait mechanism which is a significant
way of leg movement. Mechanical leg movement can be adapted to different terrain types as
compared to wheels or track movement (Sun et al., 2017, p.2611). The central pattern generator
which operates in the same way as tripod gait mechanism has been proposed for mechanical
structure of robots (Iida & Ijspeert, 2016, p.2015). Six-legged locomotion is very efficient as
compared to four-legged locomotion. Insects are the most used animals in making the robotic
structures because of their primitive neural system and stable locomotion mechanism (Schlup &
Brunner, 2018, p.37). Scientist have based robots in insect’s locomotion as shown in the figure
below.
Robots legs based on the leg of an insect (adapted from Chen et al., 2012).
Adaption for Robots
Human beings have begun to understand the tripod gait mechanism which is a significant
way of leg movement. Mechanical leg movement can be adapted to different terrain types as
compared to wheels or track movement (Sun et al., 2017, p.2611). The central pattern generator
which operates in the same way as tripod gait mechanism has been proposed for mechanical
structure of robots (Iida & Ijspeert, 2016, p.2015). Six-legged locomotion is very efficient as
compared to four-legged locomotion. Insects are the most used animals in making the robotic
structures because of their primitive neural system and stable locomotion mechanism (Schlup &
Brunner, 2018, p.37). Scientist have based robots in insect’s locomotion as shown in the figure
below.
Robots legs based on the leg of an insect (adapted from Chen et al., 2012).
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
8
The tripod gait mechanism has been modeled mechanically through the universe
kinematics through transfer phase and supports the phases. Kinematics has to be recalculated in
cases where the tripod gait (Zhong et al., 2018, p.624). The insects CPG mechanism has to be
modified mechanically to control each locomotive stride and simply control the gait transition
(Ritzmann & Zill, 2017). Robots which are modified in the tripod structure have excellent
mobility and stability which is highly recommended by a scientist. Robots of this model have the
capability to walk forward and backward by simply undertaking these unique simple
characteristics of a six-legged insect (Guedes et al., 2016, p.61). The characteristics also enable
them to be able to escape barriers in their way.
Relevance of insects to human well-being
Scientists have gained a huge understanding of the future of robotics with the aid of
tripod gaits. Tripod gait mechanism is not limited to rough or patchy parts of the environment as
compared to traced and wheeled transport forms. Tripod gait mechanism has the ability to select
the best placement for the foothold (Ramdya et al., 2017, p.14494). The six-legged system of
locomotion enables the robots adaptive to uneven terrain therefore been able to arrange their legs
shortening and lengthening in the relation of the surface levels (Tallis, 2016). This adaptive
characteristic gives the ability to jump and avoid obstacles which may be blocking their way.
Having a tripod walking mechanism robots have active suspension as compared to the other
means of transport enabling this mechanism of locomotion to force control through the foothold
points (Reches et al., 2018). Apart from the tripod gait mechanism which has been adapted from
insects and been used in designing of robots, human being have also benefited largely from
insects. Insects like bees have helped in pollination which helps in crop production as a large
percentage of flowering plants depend on pollination from insects (Bateman & Rudall, 2014,
The tripod gait mechanism has been modeled mechanically through the universe
kinematics through transfer phase and supports the phases. Kinematics has to be recalculated in
cases where the tripod gait (Zhong et al., 2018, p.624). The insects CPG mechanism has to be
modified mechanically to control each locomotive stride and simply control the gait transition
(Ritzmann & Zill, 2017). Robots which are modified in the tripod structure have excellent
mobility and stability which is highly recommended by a scientist. Robots of this model have the
capability to walk forward and backward by simply undertaking these unique simple
characteristics of a six-legged insect (Guedes et al., 2016, p.61). The characteristics also enable
them to be able to escape barriers in their way.
Relevance of insects to human well-being
Scientists have gained a huge understanding of the future of robotics with the aid of
tripod gaits. Tripod gait mechanism is not limited to rough or patchy parts of the environment as
compared to traced and wheeled transport forms. Tripod gait mechanism has the ability to select
the best placement for the foothold (Ramdya et al., 2017, p.14494). The six-legged system of
locomotion enables the robots adaptive to uneven terrain therefore been able to arrange their legs
shortening and lengthening in the relation of the surface levels (Tallis, 2016). This adaptive
characteristic gives the ability to jump and avoid obstacles which may be blocking their way.
Having a tripod walking mechanism robots have active suspension as compared to the other
means of transport enabling this mechanism of locomotion to force control through the foothold
points (Reches et al., 2018). Apart from the tripod gait mechanism which has been adapted from
insects and been used in designing of robots, human being have also benefited largely from
insects. Insects like bees have helped in pollination which helps in crop production as a large
percentage of flowering plants depend on pollination from insects (Bateman & Rudall, 2014,
9
p.122). Bees also helps in making honey which can be used as food by people for some health
benefits. Many various species of insects are edible like the termites and crickets (Gaugler, 2017,
p.43). Without the existence of insect some commercial product like silk from silk worm could
not be available.
Conclusion
Despite the fact that this kind of locomotion is not very much recognized in our society
today, tripod gait insect structure has very much impacted and influenced our way of scientific
thinking as of the present and the future development of robots in the robotic world. Insects have
given a lot of benefits to human kinds despite the fact that some are termed as a pest as they have
harmful effects to agricultural production and people. Insects have continuously given rise to
beneficial innovation to mankind from medicine and food staff as honey which is made by bees
to robotics which has adapted it tripod gait transport mechanism as it is stable and rapid.as
mankind continuous to recover more species of insects and understand their nature more, insect
will continue to benefit human beings.
p.122). Bees also helps in making honey which can be used as food by people for some health
benefits. Many various species of insects are edible like the termites and crickets (Gaugler, 2017,
p.43). Without the existence of insect some commercial product like silk from silk worm could
not be available.
Conclusion
Despite the fact that this kind of locomotion is not very much recognized in our society
today, tripod gait insect structure has very much impacted and influenced our way of scientific
thinking as of the present and the future development of robots in the robotic world. Insects have
given a lot of benefits to human kinds despite the fact that some are termed as a pest as they have
harmful effects to agricultural production and people. Insects have continuously given rise to
beneficial innovation to mankind from medicine and food staff as honey which is made by bees
to robotics which has adapted it tripod gait transport mechanism as it is stable and rapid.as
mankind continuous to recover more species of insects and understand their nature more, insect
will continue to benefit human beings.
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
10
References
Bateman, R.M. and Rudall, P.J., 2014. Bumblebee-mediated pollination of English populations
of the Military Orchid (Orchis militaris): its possible relevance to functional morphology,
life history and climate change. New Journal of Botany, 4(3), pp.122-133.
Chen, G., Jin, B. and Chen, Y., 2017. Tripod gait-based turning gait of a six-legged walking
robot. Journal of Mechanical Science and Technology, 31(3), pp.1401-1411.
Cully, A., Clune, J., Tarapore, D. and Mouret, J.B., 2015. Robots that can adapt like
animals. Nature, 521(7553), p.503.
Duan, W., Hou, J., Liu, H., Hu, B., Yan, W. and Duan, H., 2018, February. Gait Planning of one
Amphibious Robot with Six Arc Legs. In Proceedings of the 2018 4th International
Conference on Mechatronics and Robotics Engineering (pp. 68-72). ACM.
Gaugler, R., 2017. Entomopathogenic Nematodes in Biological Control: 0. CRC press..43-62.
Grzelczyk, D., Stanczyk, B. and Awrejcewicz, J., 2017. Kinematics, dynamics and power
consumption analysis of the hexapod robot during walking with tripod gait. International
Journal of Structural Stability and Dynamics, 17(05), p.1740010.
Guedes, R.N.C., Smagghe, G., Stark, J.D. and Desneux, N., 2016. Pesticide-induced stress in
arthropod pests for optimized integrated pest management programs. Annual review of
entomology, 61, pp
Iida, F. and Ijspeert, A.J., 2016. Biologically inspired robotics. In Springer Handbook of
Robotics (pp. 2015-2034). Springer, Cham.
References
Bateman, R.M. and Rudall, P.J., 2014. Bumblebee-mediated pollination of English populations
of the Military Orchid (Orchis militaris): its possible relevance to functional morphology,
life history and climate change. New Journal of Botany, 4(3), pp.122-133.
Chen, G., Jin, B. and Chen, Y., 2017. Tripod gait-based turning gait of a six-legged walking
robot. Journal of Mechanical Science and Technology, 31(3), pp.1401-1411.
Cully, A., Clune, J., Tarapore, D. and Mouret, J.B., 2015. Robots that can adapt like
animals. Nature, 521(7553), p.503.
Duan, W., Hou, J., Liu, H., Hu, B., Yan, W. and Duan, H., 2018, February. Gait Planning of one
Amphibious Robot with Six Arc Legs. In Proceedings of the 2018 4th International
Conference on Mechatronics and Robotics Engineering (pp. 68-72). ACM.
Gaugler, R., 2017. Entomopathogenic Nematodes in Biological Control: 0. CRC press..43-62.
Grzelczyk, D., Stanczyk, B. and Awrejcewicz, J., 2017. Kinematics, dynamics and power
consumption analysis of the hexapod robot during walking with tripod gait. International
Journal of Structural Stability and Dynamics, 17(05), p.1740010.
Guedes, R.N.C., Smagghe, G., Stark, J.D. and Desneux, N., 2016. Pesticide-induced stress in
arthropod pests for optimized integrated pest management programs. Annual review of
entomology, 61, pp
Iida, F. and Ijspeert, A.J., 2016. Biologically inspired robotics. In Springer Handbook of
Robotics (pp. 2015-2034). Springer, Cham.
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
11
Kottege, N., Parkinson, C., Moghadam, P., Elfes, A. and Singh, S.P., 2015, May. Energetics-
informed hexapod gait transitions across terrains. In Robotics and Automation (ICRA),
2015 IEEE International Conference on (pp. 5140-5147). IEEE.
Nolfi, S., Bongard, J., Husbands, P. and Floreano, D., 2016. Evolutionary robotics. In Springer
Handbook of Robotics (pp. 2035-2068). Springer, Cham.
Ramdya, P., Thandiackal, R., Cherney, R., Asselborn, T., Benton, R., Ijspeert, A.J. and Floreano,
D., 2017. Climbing favours the tripod gait over alternative faster insect gaits. Nature
communications, 8, p.14494.
Reches, E., Knebel, D., Rillich, J., Ayali, A. and Barzel, B., 2018. The Metastability of the
Double-Tripod Gait in Locust Locomotion. Available at SSRN 3214881.
Revzen, S., Burden, S., Moore, T., Mongeau, J., and Full, R. (2013). Instantaneous kinematic
phase reflects neuromechanical response to lateral perturbations of running cockroaches.
Biological cybernetics 107(2), 179-200. Dev, S., 2017. Insecticides of natural origin.
Routledge.
Ritzmann, R.E. and Zill, S.N., 2017. Control of Locomotion in Hexapods. In The Oxford
Handbook of Invertebrate Neurobiology.
Sato, Y. and Inoue, K., 2015, December. Tripod Gait for Six-Legged Robots on Deeply
Undulating Terrain. In The Abstracts of the international conference on advanced
mechatronics: toward evolutionary fusion of IT and mechatronics: ICAM 2015.6 (pp.
185-186). The Japan Society of Mechanical Engineers.
Kottege, N., Parkinson, C., Moghadam, P., Elfes, A. and Singh, S.P., 2015, May. Energetics-
informed hexapod gait transitions across terrains. In Robotics and Automation (ICRA),
2015 IEEE International Conference on (pp. 5140-5147). IEEE.
Nolfi, S., Bongard, J., Husbands, P. and Floreano, D., 2016. Evolutionary robotics. In Springer
Handbook of Robotics (pp. 2035-2068). Springer, Cham.
Ramdya, P., Thandiackal, R., Cherney, R., Asselborn, T., Benton, R., Ijspeert, A.J. and Floreano,
D., 2017. Climbing favours the tripod gait over alternative faster insect gaits. Nature
communications, 8, p.14494.
Reches, E., Knebel, D., Rillich, J., Ayali, A. and Barzel, B., 2018. The Metastability of the
Double-Tripod Gait in Locust Locomotion. Available at SSRN 3214881.
Revzen, S., Burden, S., Moore, T., Mongeau, J., and Full, R. (2013). Instantaneous kinematic
phase reflects neuromechanical response to lateral perturbations of running cockroaches.
Biological cybernetics 107(2), 179-200. Dev, S., 2017. Insecticides of natural origin.
Routledge.
Ritzmann, R.E. and Zill, S.N., 2017. Control of Locomotion in Hexapods. In The Oxford
Handbook of Invertebrate Neurobiology.
Sato, Y. and Inoue, K., 2015, December. Tripod Gait for Six-Legged Robots on Deeply
Undulating Terrain. In The Abstracts of the international conference on advanced
mechatronics: toward evolutionary fusion of IT and mechatronics: ICAM 2015.6 (pp.
185-186). The Japan Society of Mechanical Engineers.
12
Schlup, Y. and Brunner, T., 2018. Prospects for insects as food in Switzerland: A tobit
regression. Food Quality and Preference, 64, pp.37-46.
Sun, J., Ren, J., Jin, Y., Wang, B. and Chen, D., 2017, December. Hexapod robot kinematics
modeling and tripod gait design based on the foot end trajectory. In Robotics and
Biomimetics (ROBIO), 2017 IEEE International Conference on(pp. 2611-2616). IEEE.
Tallis, R., 2016. Aping mankind. Routledge.
Weihmann, T., Brun, P.G. and Pycroft, E., 2017. Speed dependent phase shifts and gait changes
in cockroaches running on substrates of different slipperiness. Frontiers in
zoology, 14(1), p.54.
Zhong, G., Chen, L., Jiao, Z., Li, J. and Deng, H., 2018. Locomotion control and gait planning of
a novel hexapod robot using biomimetic neurons. IEEE Transactions on Control Systems
Technology, 26(2), pp.624-636.
Zhu, Y., Guo, T., Liu, Q., Li, Q. and Yan, R., 2017. A study of arbitrary gait pattern generation
for turning of a bio-inspired hexapod robot. Robotics and Autonomous Systems, 97,
pp.125-135.
Schlup, Y. and Brunner, T., 2018. Prospects for insects as food in Switzerland: A tobit
regression. Food Quality and Preference, 64, pp.37-46.
Sun, J., Ren, J., Jin, Y., Wang, B. and Chen, D., 2017, December. Hexapod robot kinematics
modeling and tripod gait design based on the foot end trajectory. In Robotics and
Biomimetics (ROBIO), 2017 IEEE International Conference on(pp. 2611-2616). IEEE.
Tallis, R., 2016. Aping mankind. Routledge.
Weihmann, T., Brun, P.G. and Pycroft, E., 2017. Speed dependent phase shifts and gait changes
in cockroaches running on substrates of different slipperiness. Frontiers in
zoology, 14(1), p.54.
Zhong, G., Chen, L., Jiao, Z., Li, J. and Deng, H., 2018. Locomotion control and gait planning of
a novel hexapod robot using biomimetic neurons. IEEE Transactions on Control Systems
Technology, 26(2), pp.624-636.
Zhu, Y., Guo, T., Liu, Q., Li, Q. and Yan, R., 2017. A study of arbitrary gait pattern generation
for turning of a bio-inspired hexapod robot. Robotics and Autonomous Systems, 97,
pp.125-135.
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
1 out of 12
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
Copyright © 2020–2025 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.