Kinematics and Kinetics of Machines Report: Experiments and Analysis
VerifiedAdded on 2022/11/14
|20
|1489
|285
Report
AI Summary
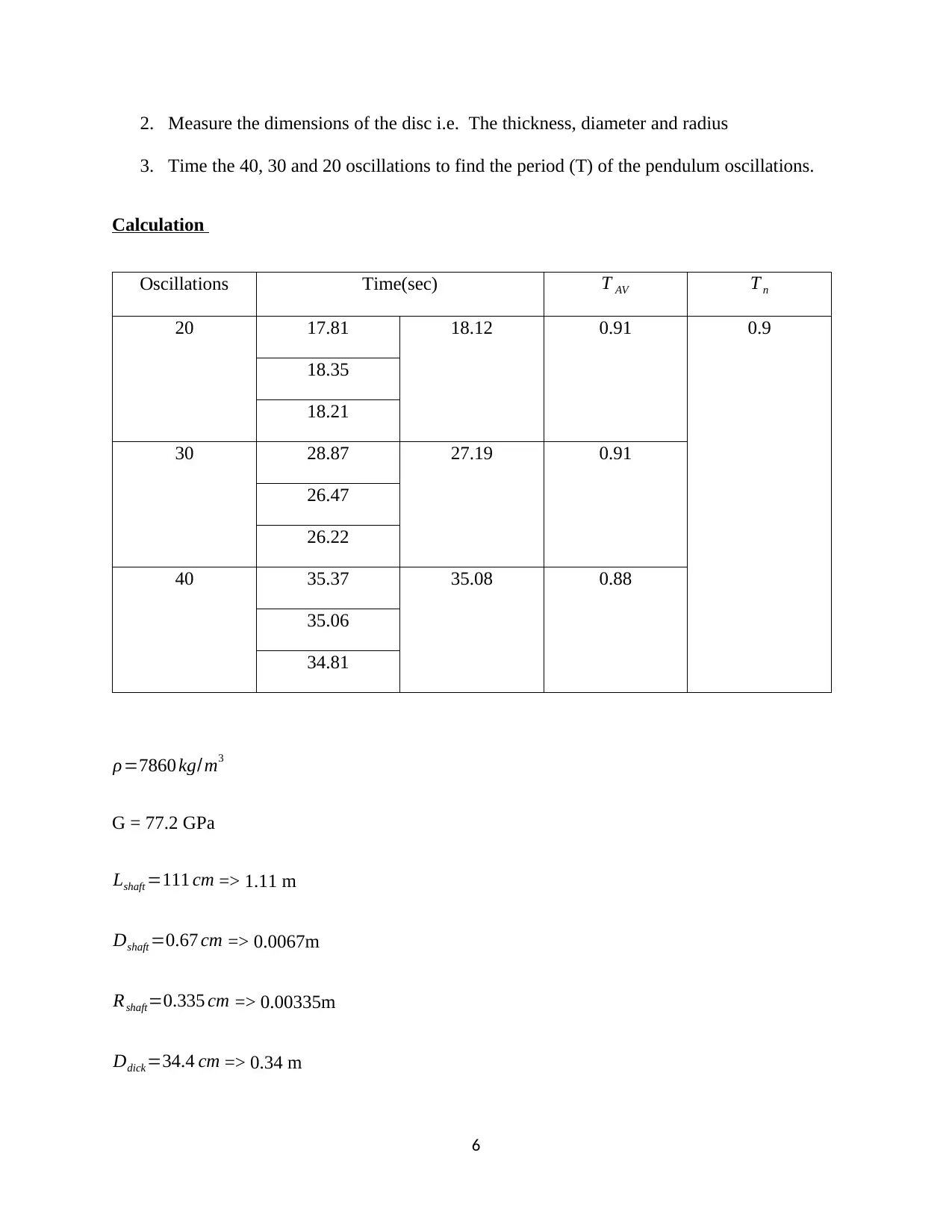
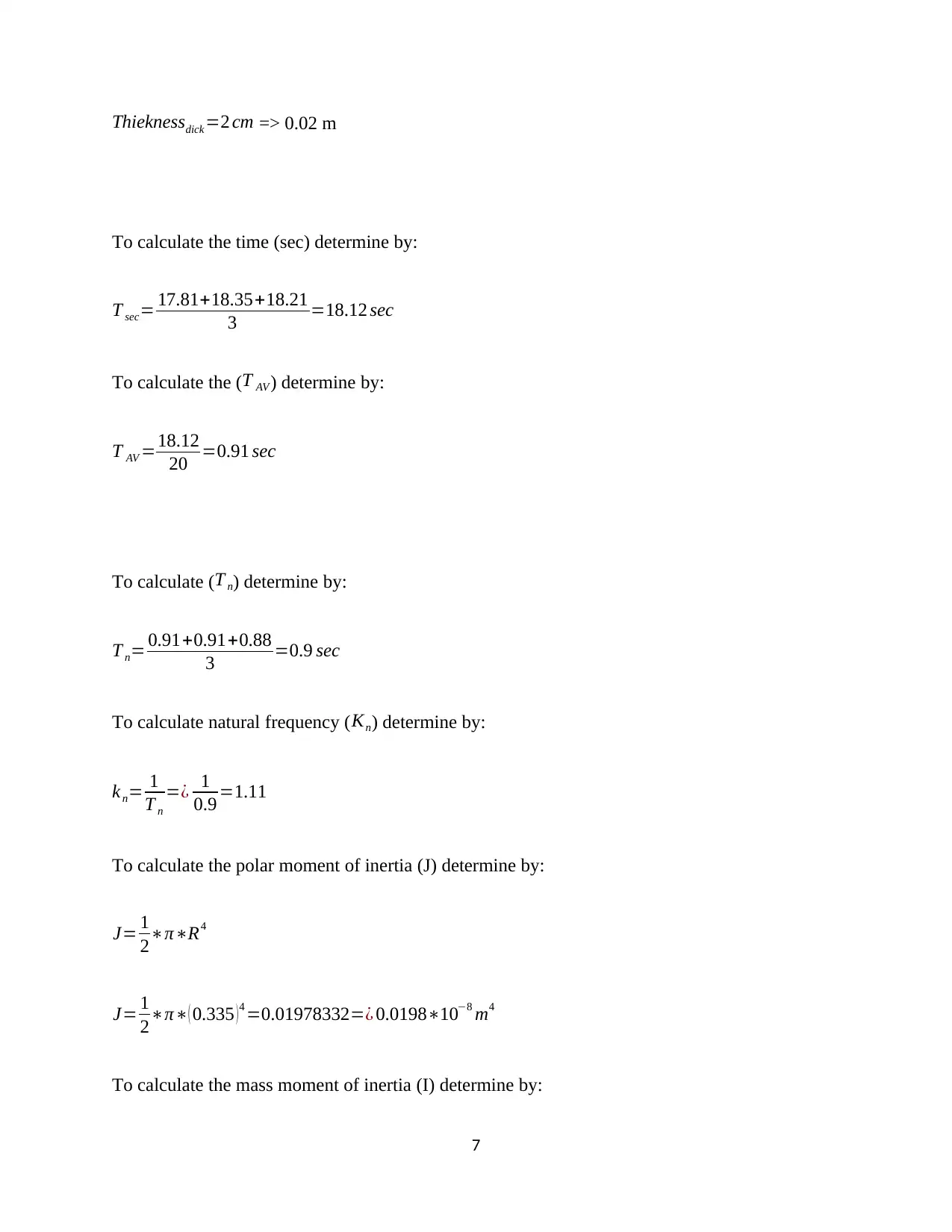
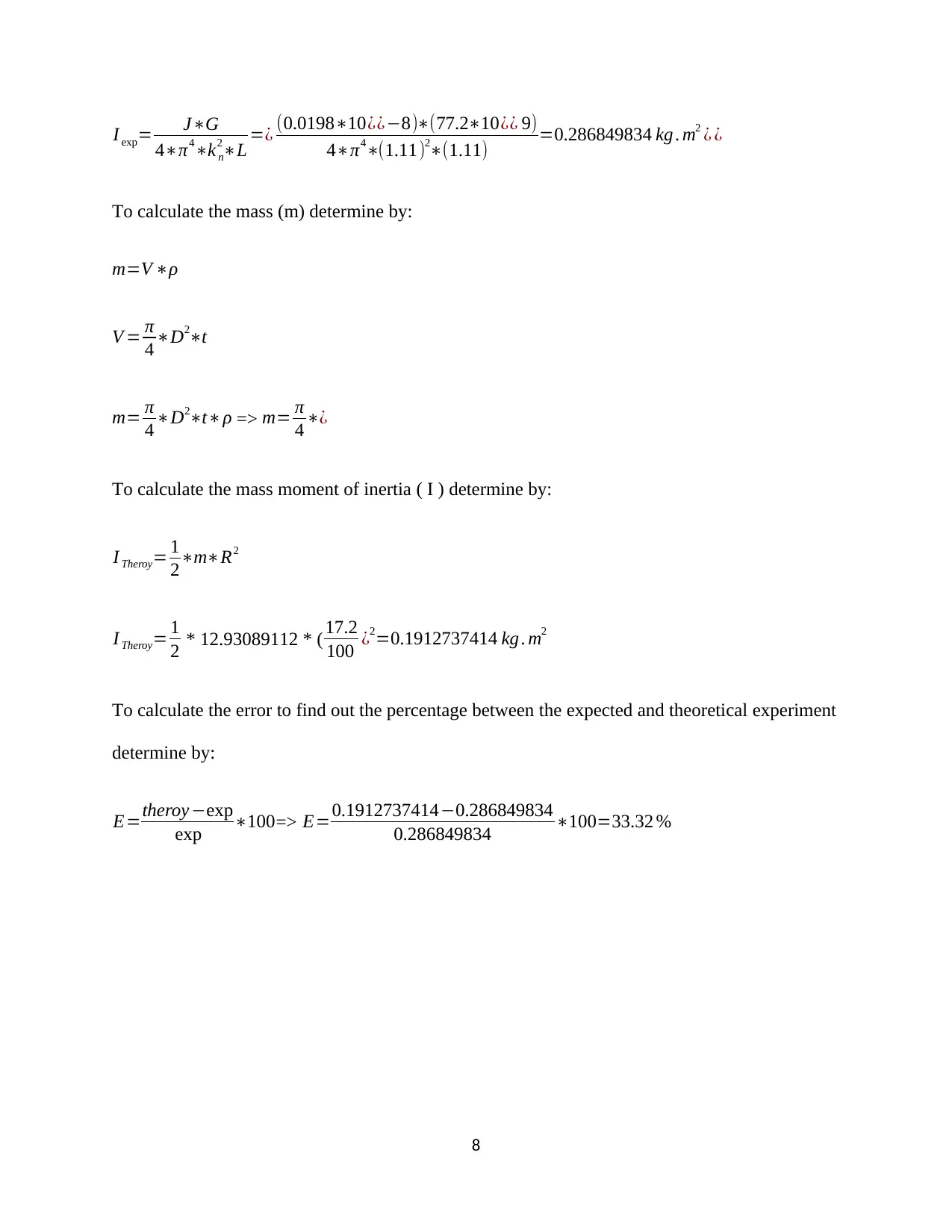
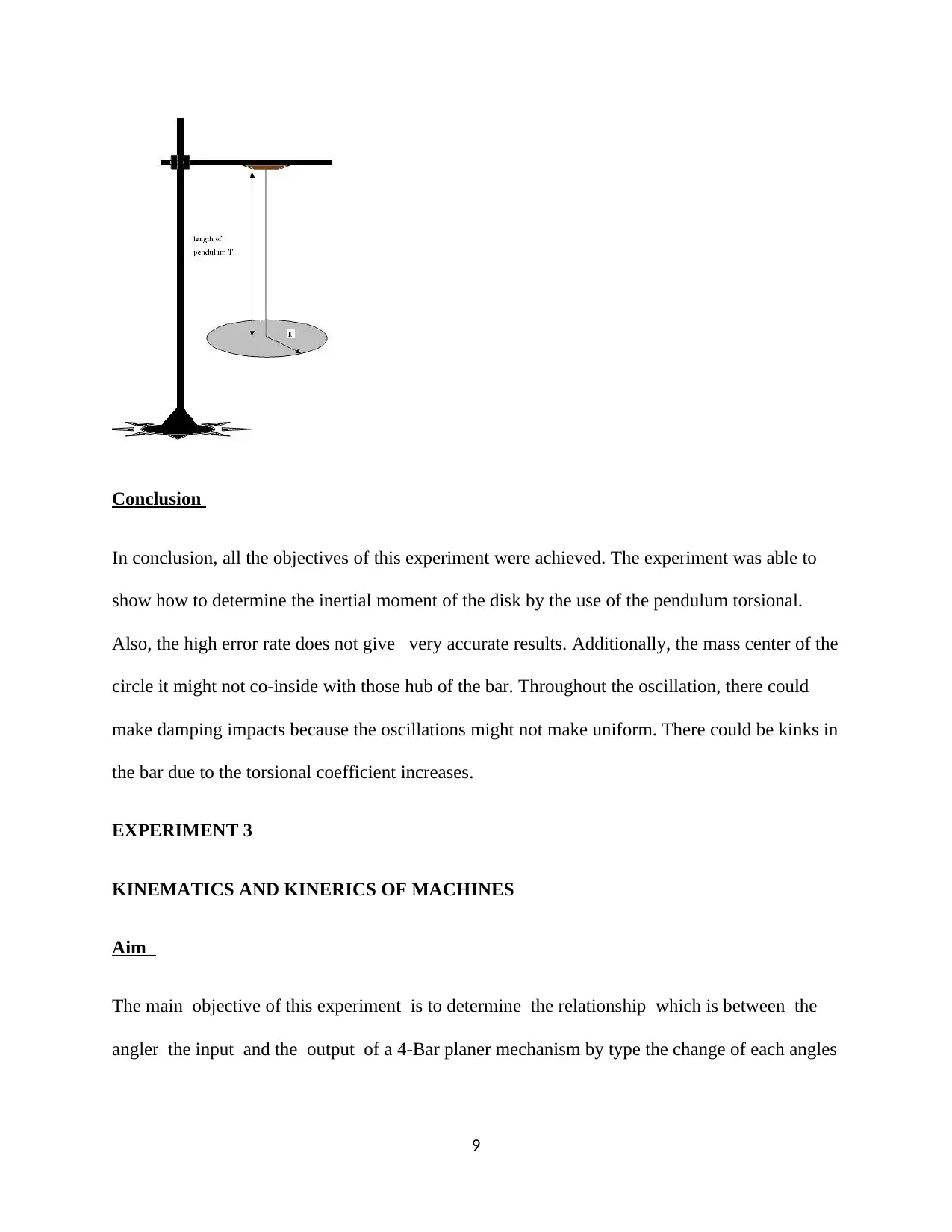
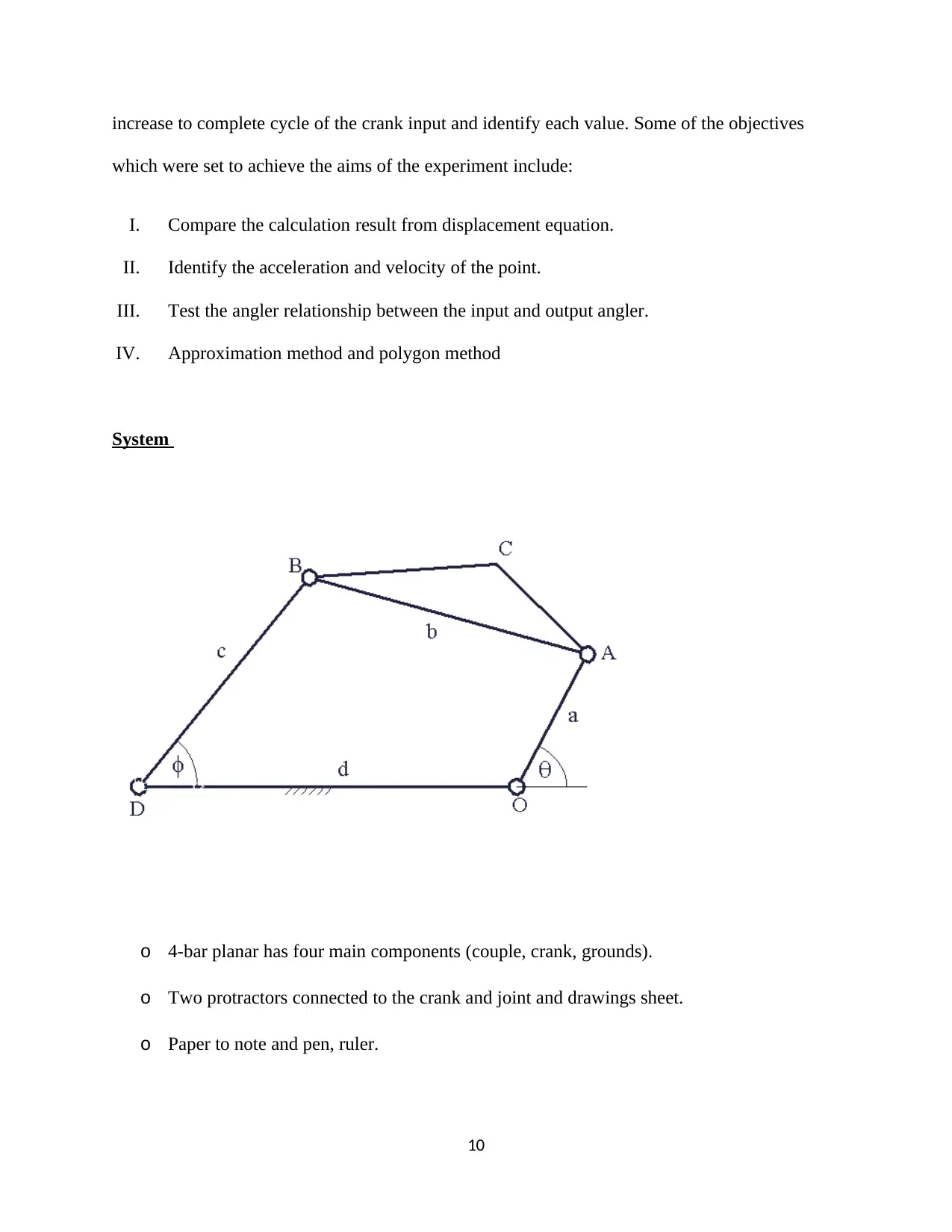
This report presents three experiments focused on the kinematics and kinetics of machines. Experiment 1 aims to determine the mass moment of inertia of a connecting rod using the parallel axes theorem, detailing procedures for weight measurement, oscillation analysis, and calculations. Experiment 2 investigates the application of a torsional pendulum to measure the rotational inertia of a disk, including measurements of dimensions, oscillation times, and calculations for time, natural frequency, and mass moment of inertia, with error analysis. Experiment 3 explores the relationship between input and output angles of a 4-bar planar mechanism, comparing experimental and theoretical results using displacement approximation and polygon methods, and calculating velocity and acceleration at different points, providing a comprehensive analysis of the mechanism's behavior.


1 out of 20

Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.