Inverses of Matrices and Gauss-Jordan Elimination
VerifiedAdded on 2020/11/09
|29
|7729
|114
AI Summary
This assignment covers the concept of matrix inverses, including the hard way (using cofactors) and the easy way (Gauss-Jordan elimination). It explains how Gauss-Jordan elimination can be used to find the inverse of a matrix by transforming it into the identity matrix. The assignment also discusses why Gauss-Jordan elimination finds solutions to systems of linear equations and provides examples to illustrate these concepts.
Contribute Materials
Your contribution can guide someone’s learning journey. Share your
documents today.
Lecture 1
Subscript and summation notation
This materialis covered in Section 7 of the course notes.
The problem
How do we write an arbitrary quadratic?
What about a quartic?
Two equations in two unknowns?
Three equations in three unknowns?
What if we run out of letters?
A solution:subscripts
A better way to write a quartic might be
a4x4 + a3x3 + · · · + a1x + a0.
In the same vein, a better way to write our three equations could
be
Double-subscripts
To be truly efficient in describing a system of 3 equations in 4
unknowns, we’d like to use just three letters:one for the variables,
one for the coefficients, and one for the right-hand sides.How?
Double subscripts:
Now it doesn’t really matter how many equations or unknowns:m
equations in n unknowns becomes
Subscript and summation notation
This materialis covered in Section 7 of the course notes.
The problem
How do we write an arbitrary quadratic?
What about a quartic?
Two equations in two unknowns?
Three equations in three unknowns?
What if we run out of letters?
A solution:subscripts
A better way to write a quartic might be
a4x4 + a3x3 + · · · + a1x + a0.
In the same vein, a better way to write our three equations could
be
Double-subscripts
To be truly efficient in describing a system of 3 equations in 4
unknowns, we’d like to use just three letters:one for the variables,
one for the coefficients, and one for the right-hand sides.How?
Double subscripts:
Now it doesn’t really matter how many equations or unknowns:m
equations in n unknowns becomes
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.

More efficient:a quantified variable
We can stillbe a bit more efficient by describing, generically, the
jth equation and saying what values jis allowed to take:
Sigma notation
To get rid of the sums, we use shorthand.The sigma notation
nX
i=m
Ei
means Em + Em+1 + · · · + En and reads as “The sum as igoes
from m to n of Ei .”
5X
i=1
ai means
4X
j=−2
j2 means
4X
m=1
dm
m means
Sigma notation in action
So an efficient way to describe an arbitrary polynomialwould be
Or a really efficient way to write down m equations in n unknowns
would be
Lecture 2
Introducing matrices
This materialis covered in Workbook 7.1 of the course notes.
We can stillbe a bit more efficient by describing, generically, the
jth equation and saying what values jis allowed to take:
Sigma notation
To get rid of the sums, we use shorthand.The sigma notation
nX
i=m
Ei
means Em + Em+1 + · · · + En and reads as “The sum as igoes
from m to n of Ei .”
5X
i=1
ai means
4X
j=−2
j2 means
4X
m=1
dm
m means
Sigma notation in action
So an efficient way to describe an arbitrary polynomialwould be
Or a really efficient way to write down m equations in n unknowns
would be
Lecture 2
Introducing matrices
This materialis covered in Workbook 7.1 of the course notes.
Recap (Lecture 1)
◮ To organise multiple unknowns in a systematic way, we use
subscripted variables, like a1, a2, . . .
◮ The sigma notation fX
i =s
Ei
means Es + Es+1 + · · · + Ef −1 + Ef and reads “the sum as i
goes from s to fof Ei .”
Definition of matrices
Definition
A matrix is a rectangular grid of numbers.If the grid has m rows
and n columns, then we callit an m × n matrix (we say “m by n
matrix”).
Examples
Notation for matrices
Convention:the matrix is called A (capitalletter) and then the
numbers in the grid are called ai ,j (lower-case letter).
Examples
A =
1 0 −1
4 2 −5
1 −1 2
B = 1 0 π 0.1
2.7 ln(5) 3 2
Then A is × and B is × .
◮ a2,3 =
◮ a1,2 =
◮ b1,3 =
◮ b2,2 =
Terminology.
We callthe numbers in a matrix its entries.
If we want to single out the entry in the 4th row and 7th column,
we callit the 4, 7-entry.
We callthe entry in the ith row and jth column the i , j -entry.
◮ To organise multiple unknowns in a systematic way, we use
subscripted variables, like a1, a2, . . .
◮ The sigma notation fX
i =s
Ei
means Es + Es+1 + · · · + Ef −1 + Ef and reads “the sum as i
goes from s to fof Ei .”
Definition of matrices
Definition
A matrix is a rectangular grid of numbers.If the grid has m rows
and n columns, then we callit an m × n matrix (we say “m by n
matrix”).
Examples
Notation for matrices
Convention:the matrix is called A (capitalletter) and then the
numbers in the grid are called ai ,j (lower-case letter).
Examples
A =
1 0 −1
4 2 −5
1 −1 2
B = 1 0 π 0.1
2.7 ln(5) 3 2
Then A is × and B is × .
◮ a2,3 =
◮ a1,2 =
◮ b1,3 =
◮ b2,2 =
Terminology.
We callthe numbers in a matrix its entries.
If we want to single out the entry in the 4th row and 7th column,
we callit the 4, 7-entry.
We callthe entry in the ith row and jth column the i , j -entry.
Using matrices:systems of equations
Consider the system of equations
7x1 − 3x2 + 5x3 = 8
4x1 + 4x2 + x3 = −1
x1 + x3 = 5.
We can encode allthe important information in this system in a
3 × 4 matrix:
Types of matrices:row and column
A row matrix or row vector is a matrix with just one row, so it’s
1 × n.
Eg:
A column matrix or column vector is a matrix with just one
column, so it’s n × 1.
Eg:
Types of matrices:square
A square matrix is one that has the same number of rows as
columns.It is n × n.
Eg:
The number of rows (and columns) n is called the size or order of
the square matrix.
Square matrices:Leading diagonaland trace
The leading diagonalin a square matrix is the entries from top left
— — to bottom right — .
1 −1
2 3
2 4 5
0 1 1
5 2 7
The trace of a square matrix of order n is the sum of the entries on
the leading diagonal.That is
tr(A) = .
You cannot take the trace of a matrix that isn’t square.
Consider the system of equations
7x1 − 3x2 + 5x3 = 8
4x1 + 4x2 + x3 = −1
x1 + x3 = 5.
We can encode allthe important information in this system in a
3 × 4 matrix:
Types of matrices:row and column
A row matrix or row vector is a matrix with just one row, so it’s
1 × n.
Eg:
A column matrix or column vector is a matrix with just one
column, so it’s n × 1.
Eg:
Types of matrices:square
A square matrix is one that has the same number of rows as
columns.It is n × n.
Eg:
The number of rows (and columns) n is called the size or order of
the square matrix.
Square matrices:Leading diagonaland trace
The leading diagonalin a square matrix is the entries from top left
— — to bottom right — .
1 −1
2 3
2 4 5
0 1 1
5 2 7
The trace of a square matrix of order n is the sum of the entries on
the leading diagonal.That is
tr(A) = .
You cannot take the trace of a matrix that isn’t square.
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.
Triangular matrices
A square matrix is upper triangular if allthe entries below the
leading diagonalare zero.
A square matrix is lower triangular if allthe entries above the
leading diagonalare zero.
Diagonalmatrices and the zero matrix
A square matrix is diagonalif the only nonzero entries are on the
leading diagonal.This is the same as saying it is both
and .
For any m and n the m × n zero matrix 0m,n is the matrix
. . .
. . .
... ...
We write 0m instead of 0m,m.
Describe these matrices (give the trace if possible).
A =
1 3 2
1 1 −1
4 3 0
B = 1 1 0
0 −1 1 C = 1 2
0 3
D =
1 0 0
0 0 0
1 2 0
E =
1 0 0
0 3 0
0 0 −1
F =
1 1 1
1 1 1
1 1 1
(A)
(B)
(C)
(D)
(E)
(F)
Equality of matrices
We say that matrices A and B are equaland write A = B if:
◮ They are the same shape (both m × n, say), and
◮ Each entry of A is equalto the corresponding entry of B.
Examples:
1 3
3 −1
a 3
3 b
1 3
3 −1
a 2
3 b
1 3 4
3 −1 2
a 3
3 b
A square matrix is upper triangular if allthe entries below the
leading diagonalare zero.
A square matrix is lower triangular if allthe entries above the
leading diagonalare zero.
Diagonalmatrices and the zero matrix
A square matrix is diagonalif the only nonzero entries are on the
leading diagonal.This is the same as saying it is both
and .
For any m and n the m × n zero matrix 0m,n is the matrix
. . .
. . .
... ...
We write 0m instead of 0m,m.
Describe these matrices (give the trace if possible).
A =
1 3 2
1 1 −1
4 3 0
B = 1 1 0
0 −1 1 C = 1 2
0 3
D =
1 0 0
0 0 0
1 2 0
E =
1 0 0
0 3 0
0 0 −1
F =
1 1 1
1 1 1
1 1 1
(A)
(B)
(C)
(D)
(E)
(F)
Equality of matrices
We say that matrices A and B are equaland write A = B if:
◮ They are the same shape (both m × n, say), and
◮ Each entry of A is equalto the corresponding entry of B.
Examples:
1 3
3 −1
a 3
3 b
1 3
3 −1
a 2
3 b
1 3 4
3 −1 2
a 3
3 b
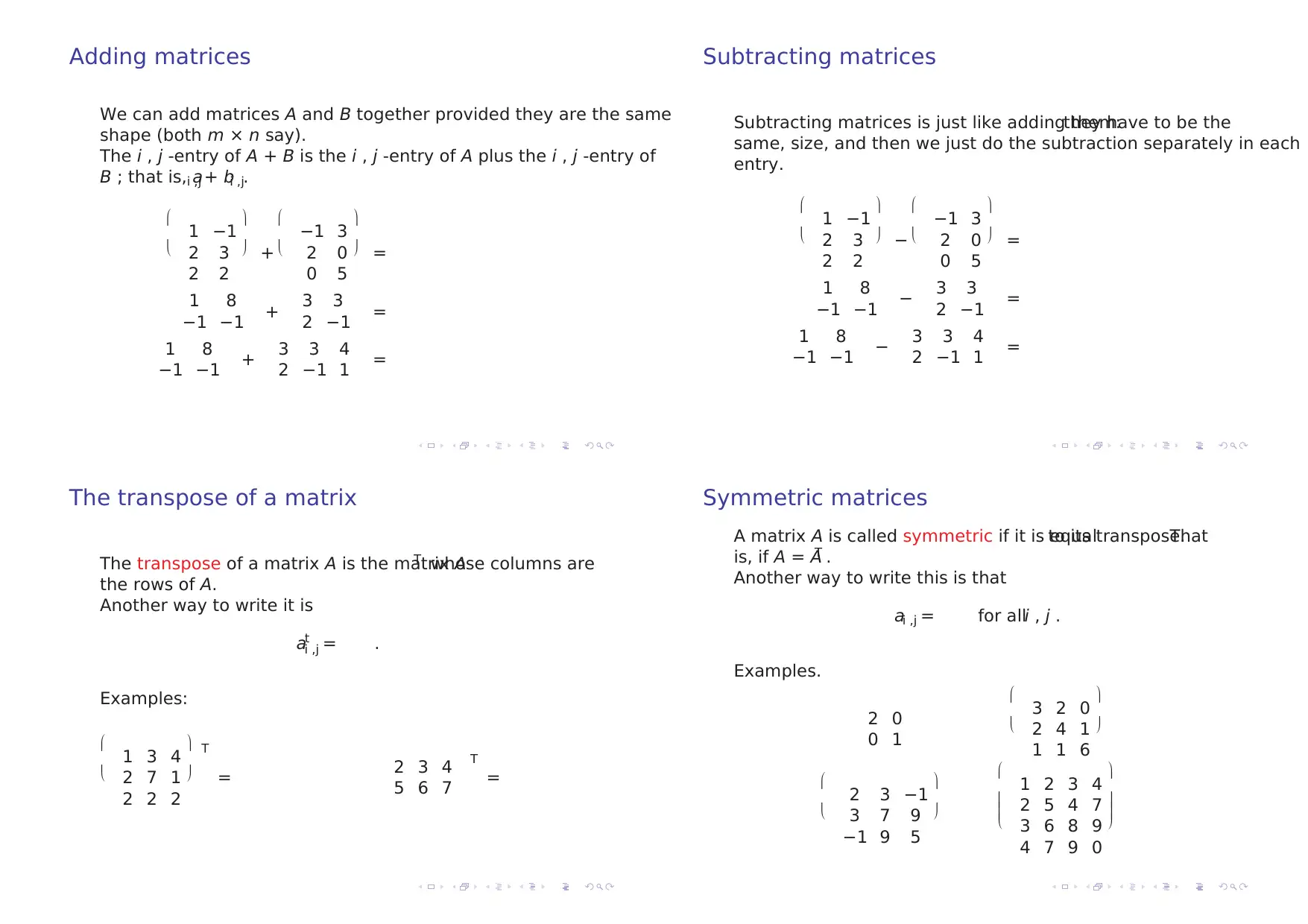
Adding matrices
We can add matrices A and B together provided they are the same
shape (both m × n say).
The i , j -entry of A + B is the i , j -entry of A plus the i , j -entry of
B ; that is, ai ,j + bi ,j.
1 −1
2 3
2 2
+
−1 3
2 0
0 5
=
1 8
−1 −1 + 3 3
2 −1 =
1 8
−1 −1 + 3 3 4
2 −1 1 =
Subtracting matrices
Subtracting matrices is just like adding them:they have to be the
same, size, and then we just do the subtraction separately in each
entry.
1 −1
2 3
2 2
−
−1 3
2 0
0 5
=
1 8
−1 −1 − 3 3
2 −1 =
1 8
−1 −1 − 3 3 4
2 −1 1 =
The transpose of a matrix
The transpose of a matrix A is the matrix AT whose columns are
the rows of A.
Another way to write it is
at
i ,j = .
Examples:
1 3 4
2 7 1
2 2 2
T
= 2 3 4
5 6 7
T
=
Symmetric matrices
A matrix A is called symmetric if it is equalto its transpose.That
is, if A = AT .
Another way to write this is that
ai ,j = for alli , j .
Examples.
2 0
0 1
3 2 0
2 4 1
1 1 6
2 3 −1
3 7 9
−1 9 5
1 2 3 4
2 5 4 7
3 6 8 9
4 7 9 0
We can add matrices A and B together provided they are the same
shape (both m × n say).
The i , j -entry of A + B is the i , j -entry of A plus the i , j -entry of
B ; that is, ai ,j + bi ,j.
1 −1
2 3
2 2
+
−1 3
2 0
0 5
=
1 8
−1 −1 + 3 3
2 −1 =
1 8
−1 −1 + 3 3 4
2 −1 1 =
Subtracting matrices
Subtracting matrices is just like adding them:they have to be the
same, size, and then we just do the subtraction separately in each
entry.
1 −1
2 3
2 2
−
−1 3
2 0
0 5
=
1 8
−1 −1 − 3 3
2 −1 =
1 8
−1 −1 − 3 3 4
2 −1 1 =
The transpose of a matrix
The transpose of a matrix A is the matrix AT whose columns are
the rows of A.
Another way to write it is
at
i ,j = .
Examples:
1 3 4
2 7 1
2 2 2
T
= 2 3 4
5 6 7
T
=
Symmetric matrices
A matrix A is called symmetric if it is equalto its transpose.That
is, if A = AT .
Another way to write this is that
ai ,j = for alli , j .
Examples.
2 0
0 1
3 2 0
2 4 1
1 1 6
2 3 −1
3 7 9
−1 9 5
1 2 3 4
2 5 4 7
3 6 8 9
4 7 9 0

Scalars and scalar multiplication
A scalar is just a number.We callit that because it scales things.
If k is a scalar and A is any matrix, we can always multiply A by k
to get kA.This is called scalar multiplication.
To calculate kA, we multiply each entry of A in turn by k.So the
i , j -entry of kA is equalto .
For example,
3
1 2
3 4
5 6
= 2
3
1 −1 −1
1 1 −1 =
−2 1 2
3 4 = π 2 1
3 1 =
Properties of matrix arithmetic
◮ Matrix addition is commutative:A + B = B + A.
◮ Matrix addition is associative:A + (B + C) = (A + B) + C.
◮ Scalar multiplication distributes over matrix addition:
k(A + B) = kA + kB.
◮ Transposition preserves sums:(A + B)T = AT + BT .
◮ Transposition preserves scalar multiplication:(kA)T = kAT .
◮ The second transpose is the originalmatrix:(AT )T = A.
Lecture 3
Matrix Multiplication
This materialis covered in Workbook 7.2 of the course notes.
Recap (Lecture 2)
◮ m × n matrix:a grid of numbers — m rows, n columns.
◮ Specialtypes of matrix:square, upper- or lower-triangular,
diagonal.
◮ the leading diagonalin a square matrices is the entries ai ,i.
◮ 0m,n is the m × n matrix with allentries 0.
◮ to add matrices, they must be the same size; then we add
corresponding entries.
◮ the transpose AT of an m × n is the n × m matrix whose
columns are the rows of A.
◮ A is symmetric if A = AT .
◮ to multiply a matrix by a constant, we multiply each entry.
◮ A + B = B + A.
◮ A + (B + C) = (A + B) + C.
◮ k(A + B) = kA + kB.
◮ (A + B)T = AT + BT .
◮ (kA)T = kAT .
◮ (AT )T = A.
A scalar is just a number.We callit that because it scales things.
If k is a scalar and A is any matrix, we can always multiply A by k
to get kA.This is called scalar multiplication.
To calculate kA, we multiply each entry of A in turn by k.So the
i , j -entry of kA is equalto .
For example,
3
1 2
3 4
5 6
= 2
3
1 −1 −1
1 1 −1 =
−2 1 2
3 4 = π 2 1
3 1 =
Properties of matrix arithmetic
◮ Matrix addition is commutative:A + B = B + A.
◮ Matrix addition is associative:A + (B + C) = (A + B) + C.
◮ Scalar multiplication distributes over matrix addition:
k(A + B) = kA + kB.
◮ Transposition preserves sums:(A + B)T = AT + BT .
◮ Transposition preserves scalar multiplication:(kA)T = kAT .
◮ The second transpose is the originalmatrix:(AT )T = A.
Lecture 3
Matrix Multiplication
This materialis covered in Workbook 7.2 of the course notes.
Recap (Lecture 2)
◮ m × n matrix:a grid of numbers — m rows, n columns.
◮ Specialtypes of matrix:square, upper- or lower-triangular,
diagonal.
◮ the leading diagonalin a square matrices is the entries ai ,i.
◮ 0m,n is the m × n matrix with allentries 0.
◮ to add matrices, they must be the same size; then we add
corresponding entries.
◮ the transpose AT of an m × n is the n × m matrix whose
columns are the rows of A.
◮ A is symmetric if A = AT .
◮ to multiply a matrix by a constant, we multiply each entry.
◮ A + B = B + A.
◮ A + (B + C) = (A + B) + C.
◮ k(A + B) = kA + kB.
◮ (A + B)T = AT + BT .
◮ (kA)T = kAT .
◮ (AT )T = A.
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
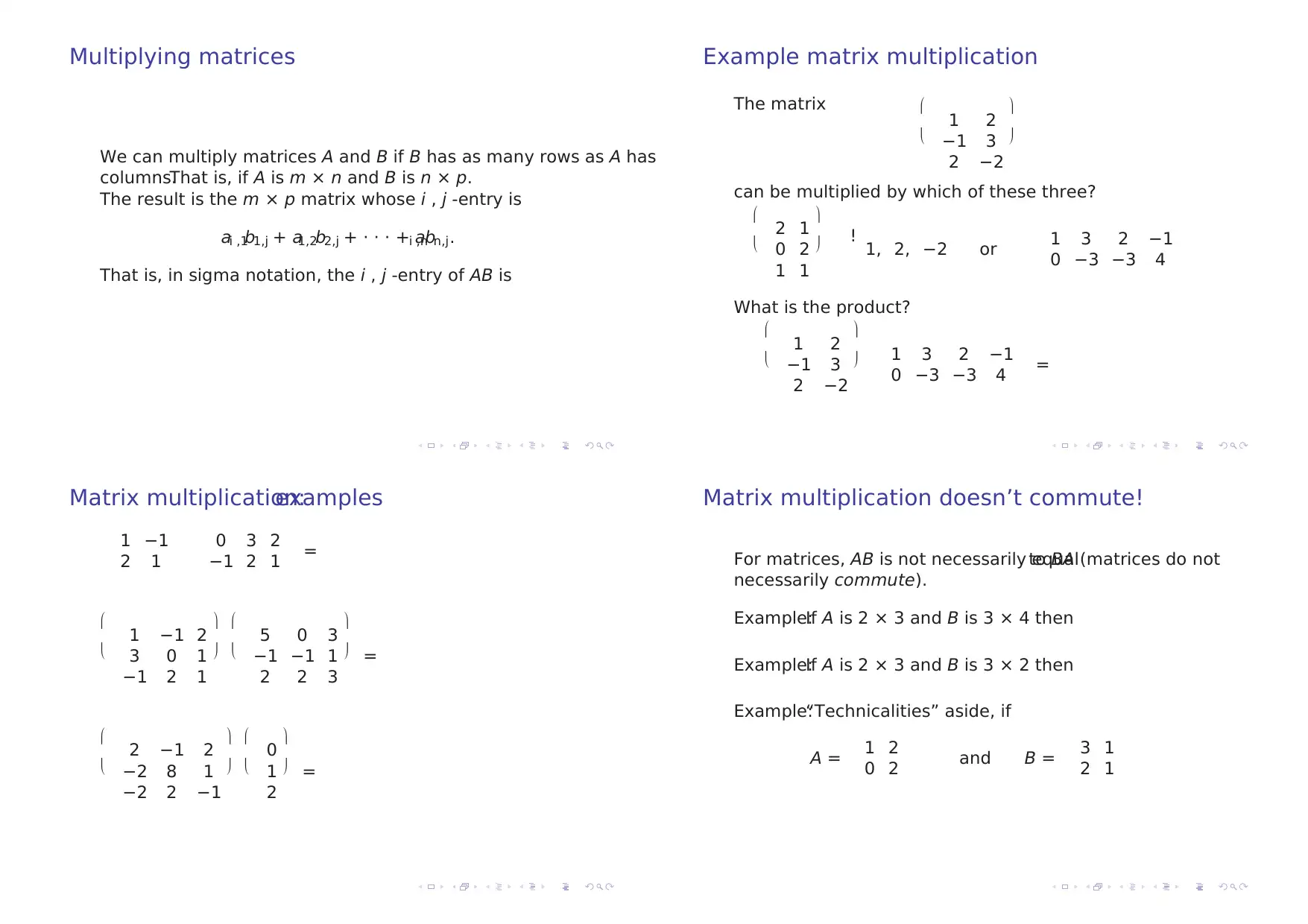
Multiplying matrices
We can multiply matrices A and B if B has as many rows as A has
columns.That is, if A is m × n and B is n × p.
The result is the m × p matrix whose i , j -entry is
ai ,1b1,j + a1,2b2,j + · · · + ai ,nbn,j.
That is, in sigma notation, the i , j -entry of AB is
Example matrix multiplication
The matrix
1 2
−1 3
2 −2
can be multiplied by which of these three?
2 1
0 2
1 1
! 1, 2, −2 or 1 3 2 −1
0 −3 −3 4
What is the product?
1 2
−1 3
2 −2
1 3 2 −1
0 −3 −3 4 =
Matrix multiplication:examples
1 −1
2 1
0 3 2
−1 2 1 =
1 −1 2
3 0 1
−1 2 1
5 0 3
−1 −1 1
2 2 3
=
2 −1 2
−2 8 1
−2 2 −1
0
1
2
=
Matrix multiplication doesn’t commute!
For matrices, AB is not necessarily equalto BA (matrices do not
necessarily commute).
Example:If A is 2 × 3 and B is 3 × 4 then
Example:If A is 2 × 3 and B is 3 × 2 then
Example:“Technicalities” aside, if
A = 1 2
0 2 and B = 3 1
2 1
We can multiply matrices A and B if B has as many rows as A has
columns.That is, if A is m × n and B is n × p.
The result is the m × p matrix whose i , j -entry is
ai ,1b1,j + a1,2b2,j + · · · + ai ,nbn,j.
That is, in sigma notation, the i , j -entry of AB is
Example matrix multiplication
The matrix
1 2
−1 3
2 −2
can be multiplied by which of these three?
2 1
0 2
1 1
! 1, 2, −2 or 1 3 2 −1
0 −3 −3 4
What is the product?
1 2
−1 3
2 −2
1 3 2 −1
0 −3 −3 4 =
Matrix multiplication:examples
1 −1
2 1
0 3 2
−1 2 1 =
1 −1 2
3 0 1
−1 2 1
5 0 3
−1 −1 1
2 2 3
=
2 −1 2
−2 8 1
−2 2 −1
0
1
2
=
Matrix multiplication doesn’t commute!
For matrices, AB is not necessarily equalto BA (matrices do not
necessarily commute).
Example:If A is 2 × 3 and B is 3 × 4 then
Example:If A is 2 × 3 and B is 3 × 2 then
Example:“Technicalities” aside, if
A = 1 2
0 2 and B = 3 1
2 1
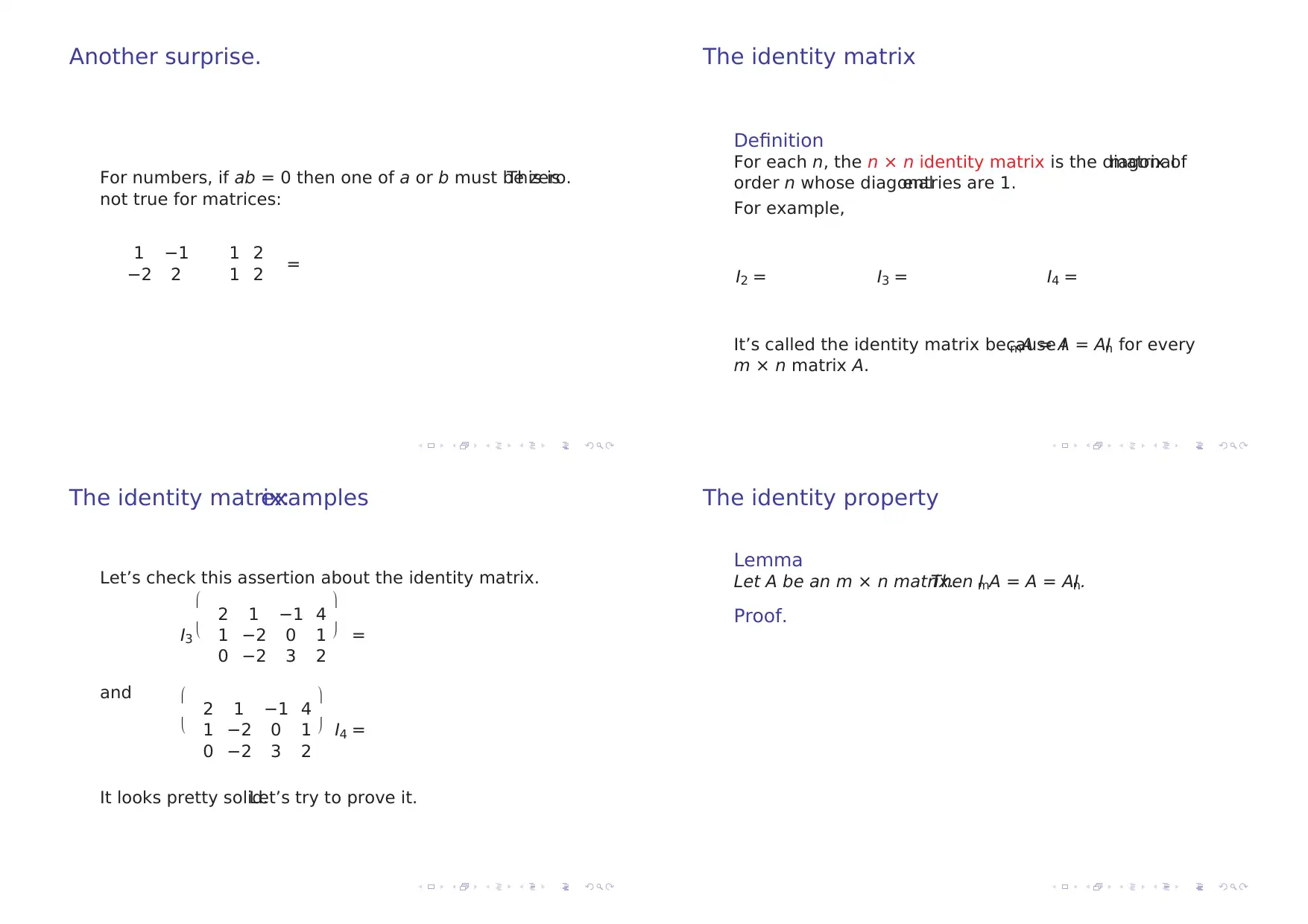
Another surprise.
For numbers, if ab = 0 then one of a or b must be zero.This is
not true for matrices:
1 −1
−2 2
1 2
1 2 =
The identity matrix
Definition
For each n, the n × n identity matrix is the diagonalmatrix of
order n whose diagonalentries are 1.
For example,
I2 = I3 = I4 =
It’s called the identity matrix because ImA = A = AIn for every
m × n matrix A.
The identity matrix:examples
Let’s check this assertion about the identity matrix.
I3
2 1 −1 4
1 −2 0 1
0 −2 3 2
=
and
2 1 −1 4
1 −2 0 1
0 −2 3 2
I4 =
It looks pretty solid.Let’s try to prove it.
The identity property
Lemma
Let A be an m × n matrix.Then ImA = A = AIn.
Proof.
For numbers, if ab = 0 then one of a or b must be zero.This is
not true for matrices:
1 −1
−2 2
1 2
1 2 =
The identity matrix
Definition
For each n, the n × n identity matrix is the diagonalmatrix of
order n whose diagonalentries are 1.
For example,
I2 = I3 = I4 =
It’s called the identity matrix because ImA = A = AIn for every
m × n matrix A.
The identity matrix:examples
Let’s check this assertion about the identity matrix.
I3
2 1 −1 4
1 −2 0 1
0 −2 3 2
=
and
2 1 −1 4
1 −2 0 1
0 −2 3 2
I4 =
It looks pretty solid.Let’s try to prove it.
The identity property
Lemma
Let A be an m × n matrix.Then ImA = A = AIn.
Proof.
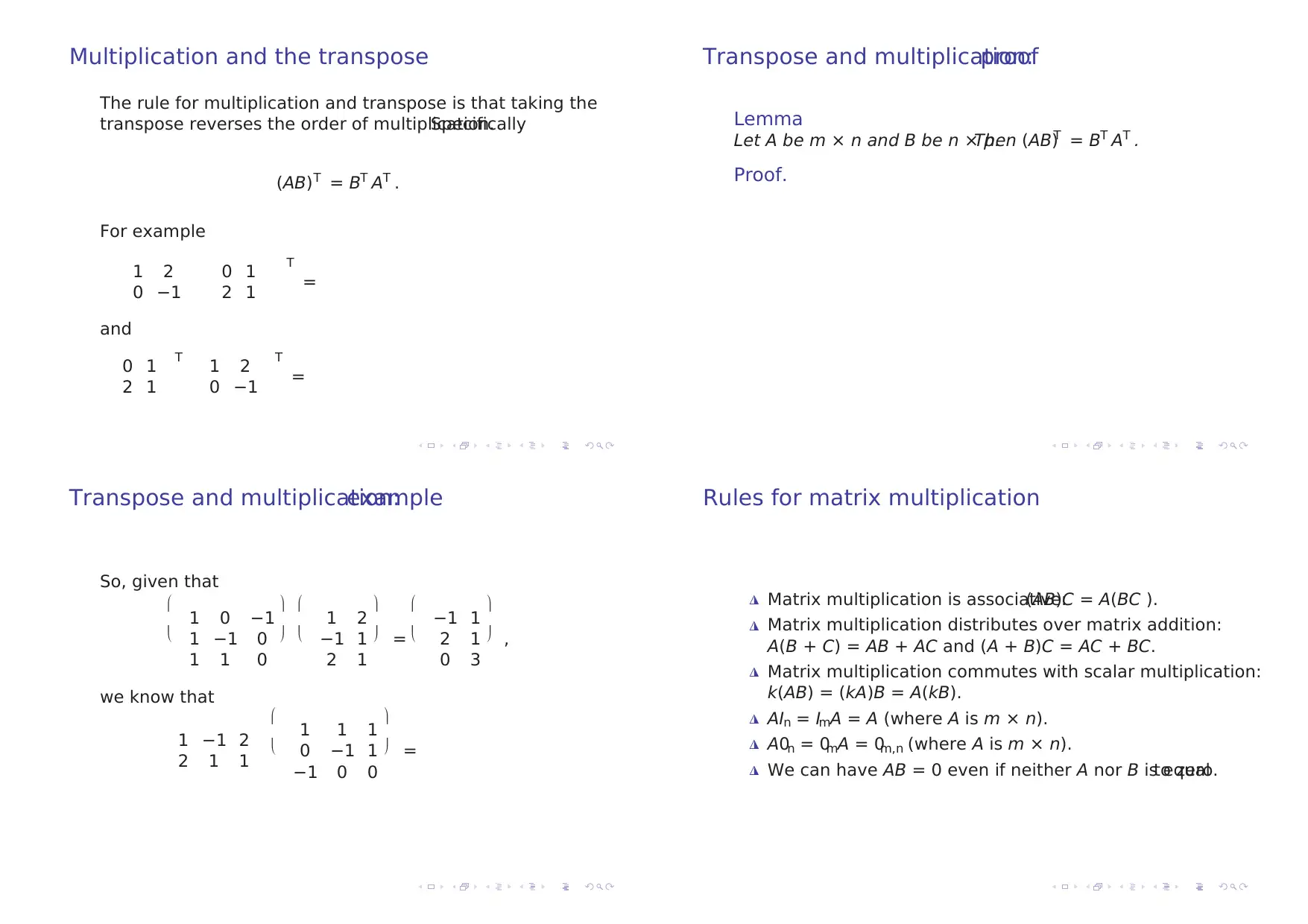
Multiplication and the transpose
The rule for multiplication and transpose is that taking the
transpose reverses the order of multiplication.Specifically
(AB)T = BT AT .
For example
1 2
0 −1
0 1
2 1
T
=
and
0 1
2 1
T 1 2
0 −1
T
=
Transpose and multiplication:proof
Lemma
Let A be m × n and B be n × p.Then (AB)T = BT AT .
Proof.
Transpose and multiplication:example
So, given that
1 0 −1
1 −1 0
1 1 0
1 2
−1 1
2 1
=
−1 1
2 1
0 3
,
we know that
1 −1 2
2 1 1
1 1 1
0 −1 1
−1 0 0
=
Rules for matrix multiplication
◮ Matrix multiplication is associative:(AB)C = A(BC ).
◮ Matrix multiplication distributes over matrix addition:
A(B + C) = AB + AC and (A + B)C = AC + BC.
◮ Matrix multiplication commutes with scalar multiplication:
k(AB) = (kA)B = A(kB).
◮ AIn = ImA = A (where A is m × n).
◮ A0n = 0mA = 0m,n (where A is m × n).
◮ We can have AB = 0 even if neither A nor B is equalto zero.
The rule for multiplication and transpose is that taking the
transpose reverses the order of multiplication.Specifically
(AB)T = BT AT .
For example
1 2
0 −1
0 1
2 1
T
=
and
0 1
2 1
T 1 2
0 −1
T
=
Transpose and multiplication:proof
Lemma
Let A be m × n and B be n × p.Then (AB)T = BT AT .
Proof.
Transpose and multiplication:example
So, given that
1 0 −1
1 −1 0
1 1 0
1 2
−1 1
2 1
=
−1 1
2 1
0 3
,
we know that
1 −1 2
2 1 1
1 1 1
0 −1 1
−1 0 0
=
Rules for matrix multiplication
◮ Matrix multiplication is associative:(AB)C = A(BC ).
◮ Matrix multiplication distributes over matrix addition:
A(B + C) = AB + AC and (A + B)C = AC + BC.
◮ Matrix multiplication commutes with scalar multiplication:
k(AB) = (kA)B = A(kB).
◮ AIn = ImA = A (where A is m × n).
◮ A0n = 0mA = 0m,n (where A is m × n).
◮ We can have AB = 0 even if neither A nor B is equalto zero.
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.
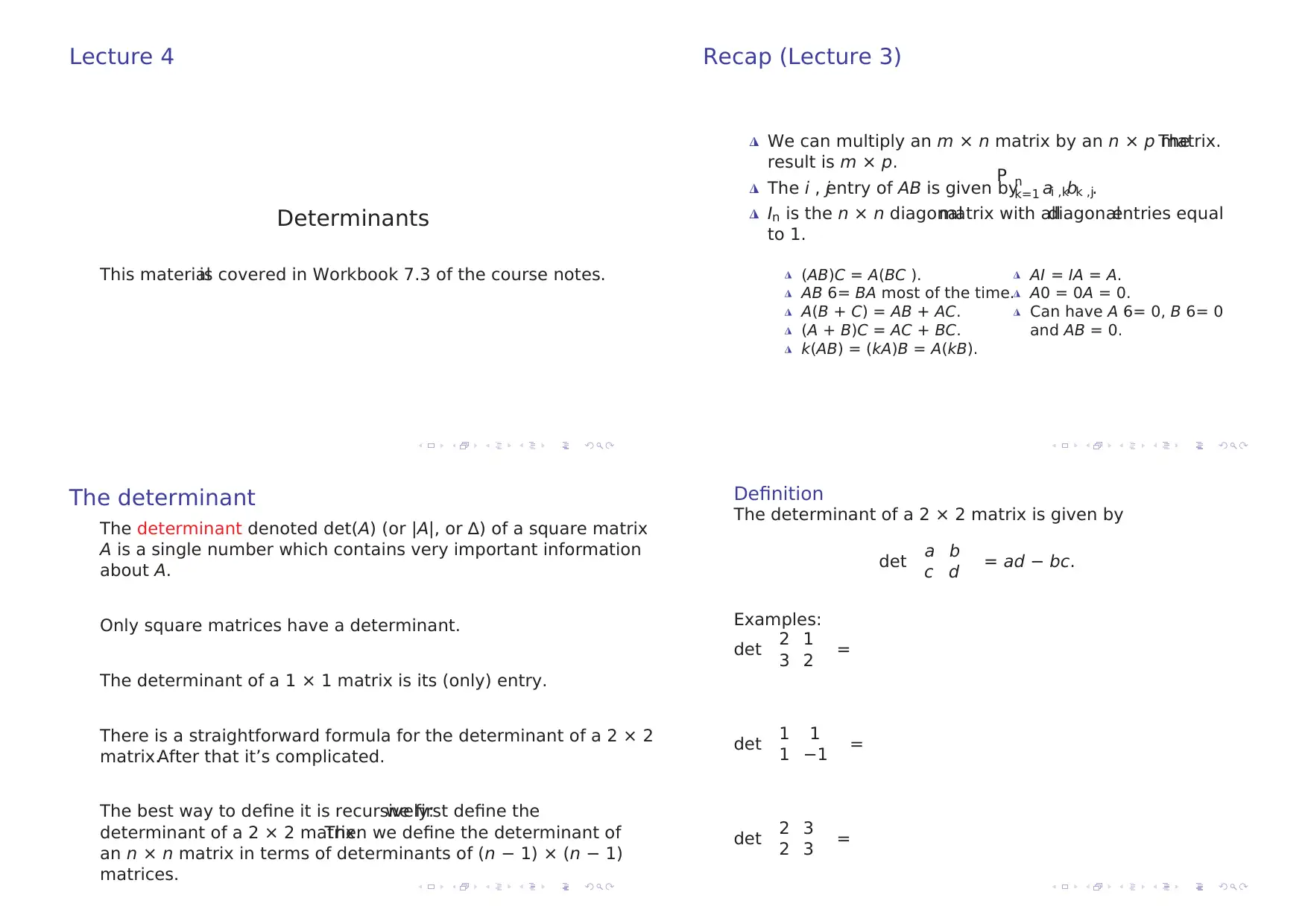
Lecture 4
Determinants
This materialis covered in Workbook 7.3 of the course notes.
Recap (Lecture 3)
◮ We can multiply an m × n matrix by an n × p matrix.The
result is m × p.
◮ The i , jentry of AB is given by
P n
k=1 ai ,kbk ,j.
◮ In is the n × n diagonalmatrix with alldiagonalentries equal
to 1.
◮ (AB)C = A(BC ).
◮ AB 6= BA most of the time.
◮ A(B + C) = AB + AC.
◮ (A + B)C = AC + BC.
◮ k(AB) = (kA)B = A(kB).
◮ AI = IA = A.
◮ A0 = 0A = 0.
◮ Can have A 6= 0, B 6= 0
and AB = 0.
The determinant
The determinant denoted det(A) (or |A|, or ∆) of a square matrix
A is a single number which contains very important information
about A.
Only square matrices have a determinant.
The determinant of a 1 × 1 matrix is its (only) entry.
There is a straightforward formula for the determinant of a 2 × 2
matrix.After that it’s complicated.
The best way to define it is recursively:we first define the
determinant of a 2 × 2 matrix.Then we define the determinant of
an n × n matrix in terms of determinants of (n − 1) × (n − 1)
matrices.
Definition
The determinant of a 2 × 2 matrix is given by
det a b
c d = ad − bc.
Examples:
det 2 1
3 2 =
det 1 1
1 −1 =
det 2 3
2 3 =
Determinants
This materialis covered in Workbook 7.3 of the course notes.
Recap (Lecture 3)
◮ We can multiply an m × n matrix by an n × p matrix.The
result is m × p.
◮ The i , jentry of AB is given by
P n
k=1 ai ,kbk ,j.
◮ In is the n × n diagonalmatrix with alldiagonalentries equal
to 1.
◮ (AB)C = A(BC ).
◮ AB 6= BA most of the time.
◮ A(B + C) = AB + AC.
◮ (A + B)C = AC + BC.
◮ k(AB) = (kA)B = A(kB).
◮ AI = IA = A.
◮ A0 = 0A = 0.
◮ Can have A 6= 0, B 6= 0
and AB = 0.
The determinant
The determinant denoted det(A) (or |A|, or ∆) of a square matrix
A is a single number which contains very important information
about A.
Only square matrices have a determinant.
The determinant of a 1 × 1 matrix is its (only) entry.
There is a straightforward formula for the determinant of a 2 × 2
matrix.After that it’s complicated.
The best way to define it is recursively:we first define the
determinant of a 2 × 2 matrix.Then we define the determinant of
an n × n matrix in terms of determinants of (n − 1) × (n − 1)
matrices.
Definition
The determinant of a 2 × 2 matrix is given by
det a b
c d = ad − bc.
Examples:
det 2 1
3 2 =
det 1 1
1 −1 =
det 2 3
2 3 =
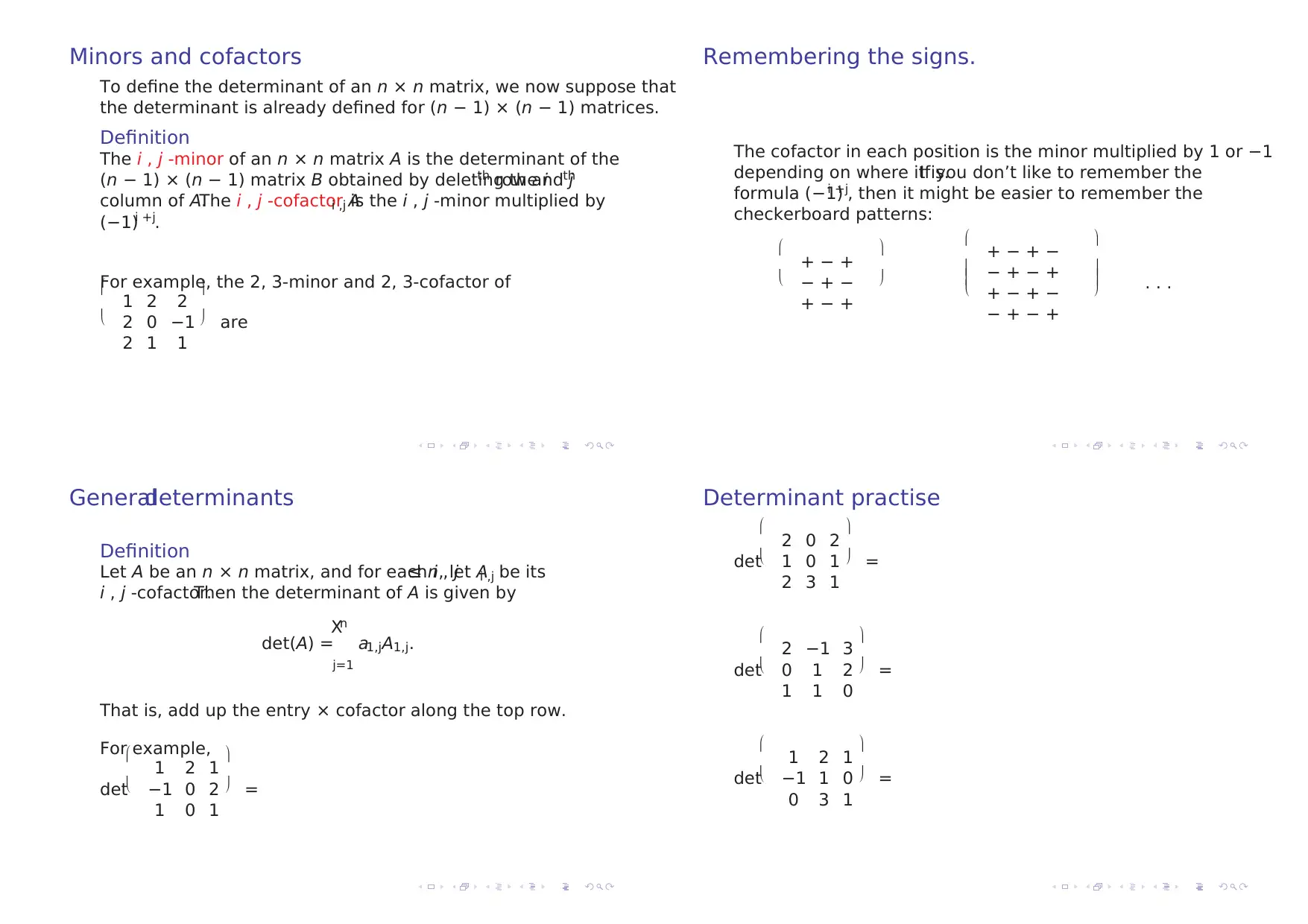
Minors and cofactors
To define the determinant of an n × n matrix, we now suppose that
the determinant is already defined for (n − 1) × (n − 1) matrices.
Definition
The i , j -minor of an n × n matrix A is the determinant of the
(n − 1) × (n − 1) matrix B obtained by deleting the ith row and jth
column of A.The i , j -cofactor Ai ,j is the i , j -minor multiplied by
(−1)i +j.
For example, the 2, 3-minor and 2, 3-cofactor of
1 2 2
2 0 −1
2 1 1
are
Remembering the signs.
The cofactor in each position is the minor multiplied by 1 or −1
depending on where it is.If you don’t like to remember the
formula (−1)i +j, then it might be easier to remember the
checkerboard patterns:
+ − +
− + −
+ − +
+ − + −
− + − +
+ − + −
− + − +
. . .
Generaldeterminants
Definition
Let A be an n × n matrix, and for each i , j≤ n, let Ai ,j be its
i , j -cofactor.Then the determinant of A is given by
det(A) =
nX
j=1
a1,jA1,j.
That is, add up the entry × cofactor along the top row.
For example,
det
1 2 1
−1 0 2
1 0 1
=
Determinant practise
det
2 0 2
1 0 1
2 3 1
=
det
2 −1 3
0 1 2
1 1 0
=
det
1 2 1
−1 1 0
0 3 1
=
To define the determinant of an n × n matrix, we now suppose that
the determinant is already defined for (n − 1) × (n − 1) matrices.
Definition
The i , j -minor of an n × n matrix A is the determinant of the
(n − 1) × (n − 1) matrix B obtained by deleting the ith row and jth
column of A.The i , j -cofactor Ai ,j is the i , j -minor multiplied by
(−1)i +j.
For example, the 2, 3-minor and 2, 3-cofactor of
1 2 2
2 0 −1
2 1 1
are
Remembering the signs.
The cofactor in each position is the minor multiplied by 1 or −1
depending on where it is.If you don’t like to remember the
formula (−1)i +j, then it might be easier to remember the
checkerboard patterns:
+ − +
− + −
+ − +
+ − + −
− + − +
+ − + −
− + − +
. . .
Generaldeterminants
Definition
Let A be an n × n matrix, and for each i , j≤ n, let Ai ,j be its
i , j -cofactor.Then the determinant of A is given by
det(A) =
nX
j=1
a1,jA1,j.
That is, add up the entry × cofactor along the top row.
For example,
det
1 2 1
−1 0 2
1 0 1
=
Determinant practise
det
2 0 2
1 0 1
2 3 1
=
det
2 −1 3
0 1 2
1 1 0
=
det
1 2 1
−1 1 0
0 3 1
=
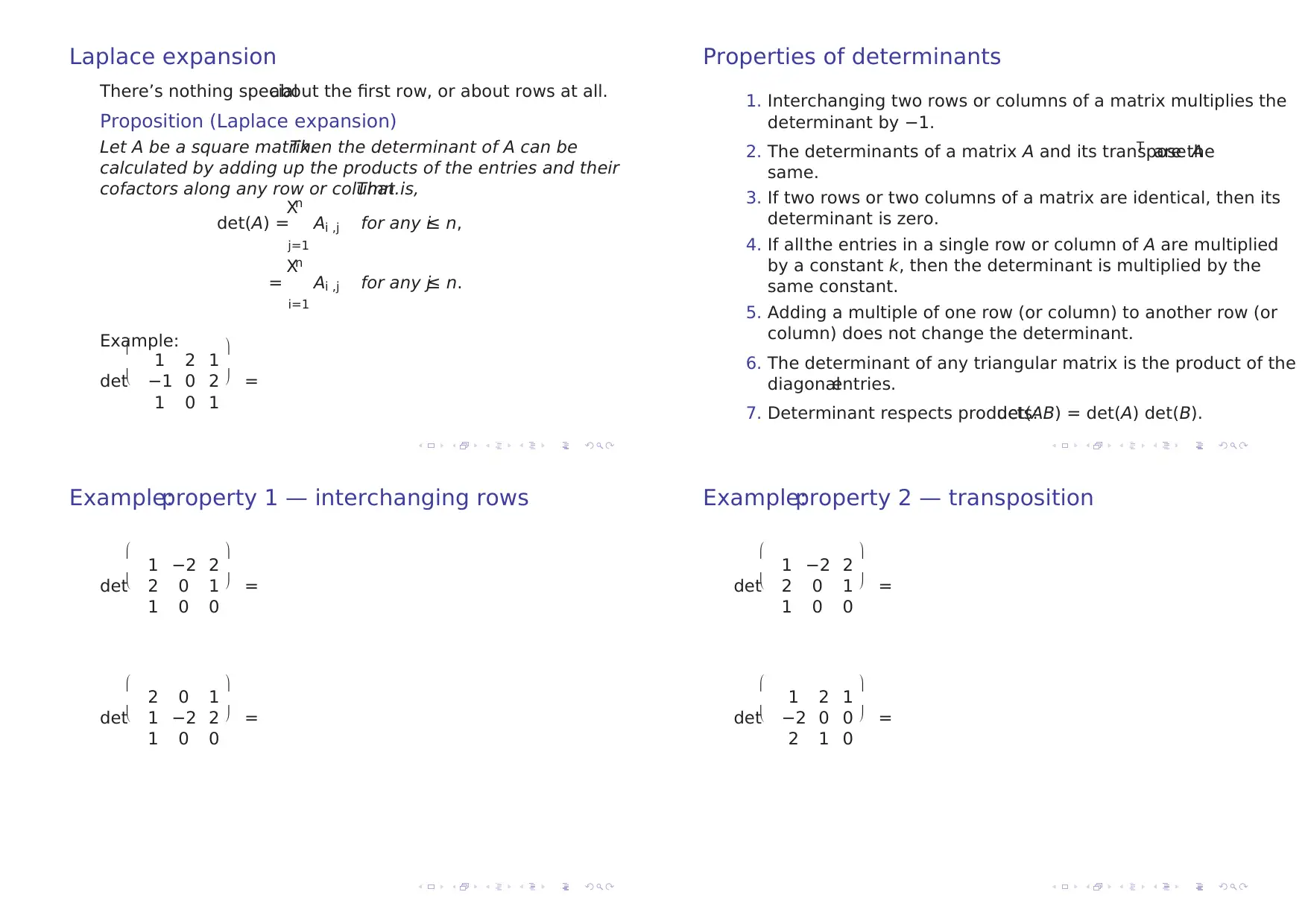
Laplace expansion
There’s nothing specialabout the first row, or about rows at all.
Proposition (Laplace expansion)
Let A be a square matrix.Then the determinant of A can be
calculated by adding up the products of the entries and their
cofactors along any row or column.That is,
det(A) =
nX
j=1
Ai ,j for any i≤ n,
=
nX
i=1
Ai ,j for any j≤ n.
Example:
det
1 2 1
−1 0 2
1 0 1
=
Properties of determinants
1. Interchanging two rows or columns of a matrix multiplies the
determinant by −1.
2. The determinants of a matrix A and its transpose AT are the
same.
3. If two rows or two columns of a matrix are identical, then its
determinant is zero.
4. If allthe entries in a single row or column of A are multiplied
by a constant k, then the determinant is multiplied by the
same constant.
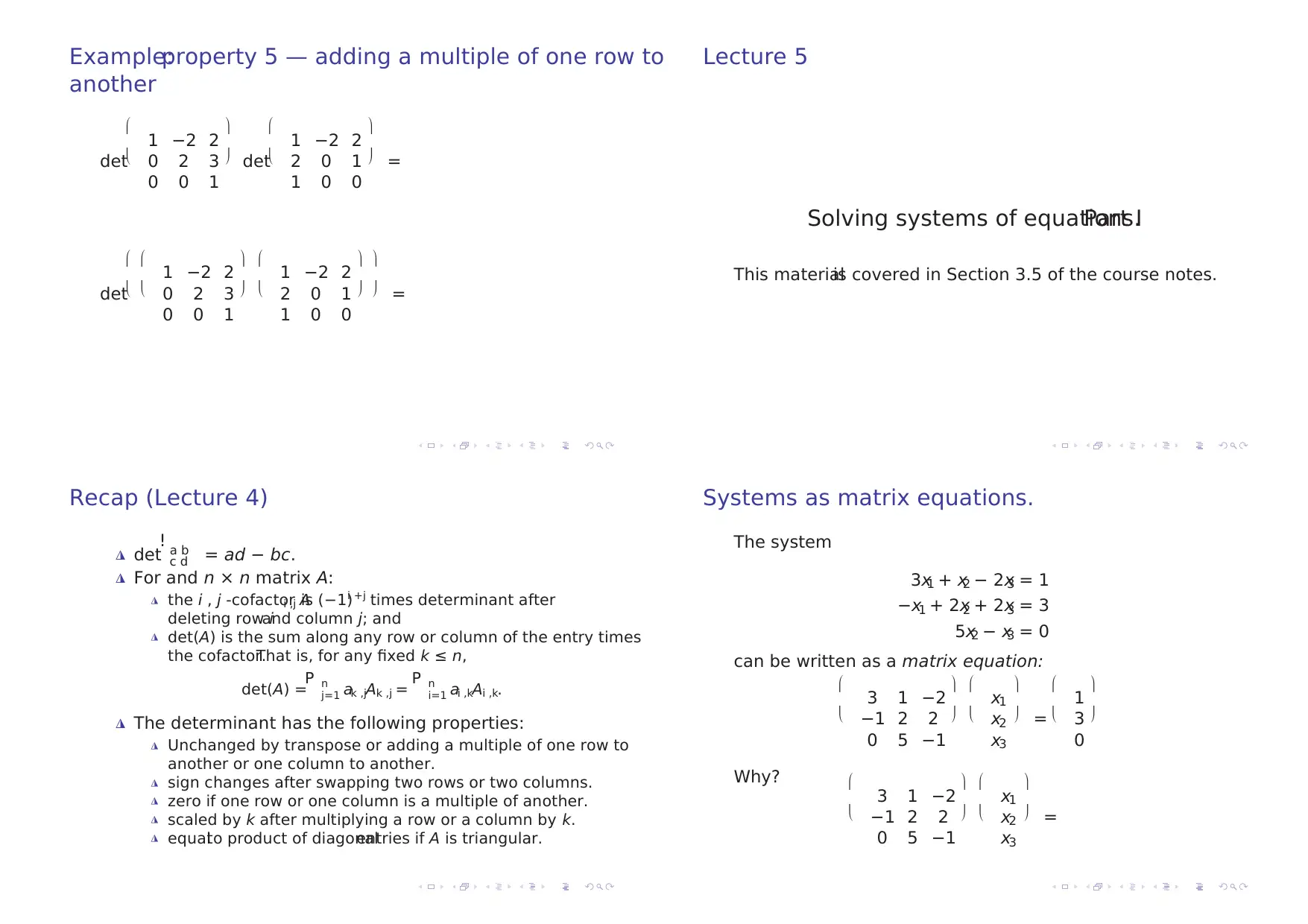
5. Adding a multiple of one row (or column) to another row (or
column) does not change the determinant.
6. The determinant of any triangular matrix is the product of the
diagonalentries.
7. Determinant respects products:det(AB) = det(A) det(B).
Example:property 1 — interchanging rows
det
1 −2 2
2 0 1
1 0 0
=
det
2 0 1
1 −2 2
1 0 0
=
Example:property 2 — transposition
det
1 −2 2
2 0 1
1 0 0
=
det
1 2 1
−2 0 0
2 1 0
=
There’s nothing specialabout the first row, or about rows at all.
Proposition (Laplace expansion)
Let A be a square matrix.Then the determinant of A can be
calculated by adding up the products of the entries and their
cofactors along any row or column.That is,
det(A) =
nX
j=1
Ai ,j for any i≤ n,
=
nX
i=1
Ai ,j for any j≤ n.
Example:
det
1 2 1
−1 0 2
1 0 1
=
Properties of determinants
1. Interchanging two rows or columns of a matrix multiplies the
determinant by −1.
2. The determinants of a matrix A and its transpose AT are the
same.
3. If two rows or two columns of a matrix are identical, then its
determinant is zero.
4. If allthe entries in a single row or column of A are multiplied
by a constant k, then the determinant is multiplied by the
same constant.
5. Adding a multiple of one row (or column) to another row (or
column) does not change the determinant.
6. The determinant of any triangular matrix is the product of the
diagonalentries.
7. Determinant respects products:det(AB) = det(A) det(B).
Example:property 1 — interchanging rows
det
1 −2 2
2 0 1
1 0 0
=
det
2 0 1
1 −2 2
1 0 0
=
Example:property 2 — transposition
det
1 −2 2
2 0 1
1 0 0
=
det
1 2 1
−2 0 0
2 1 0
=
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
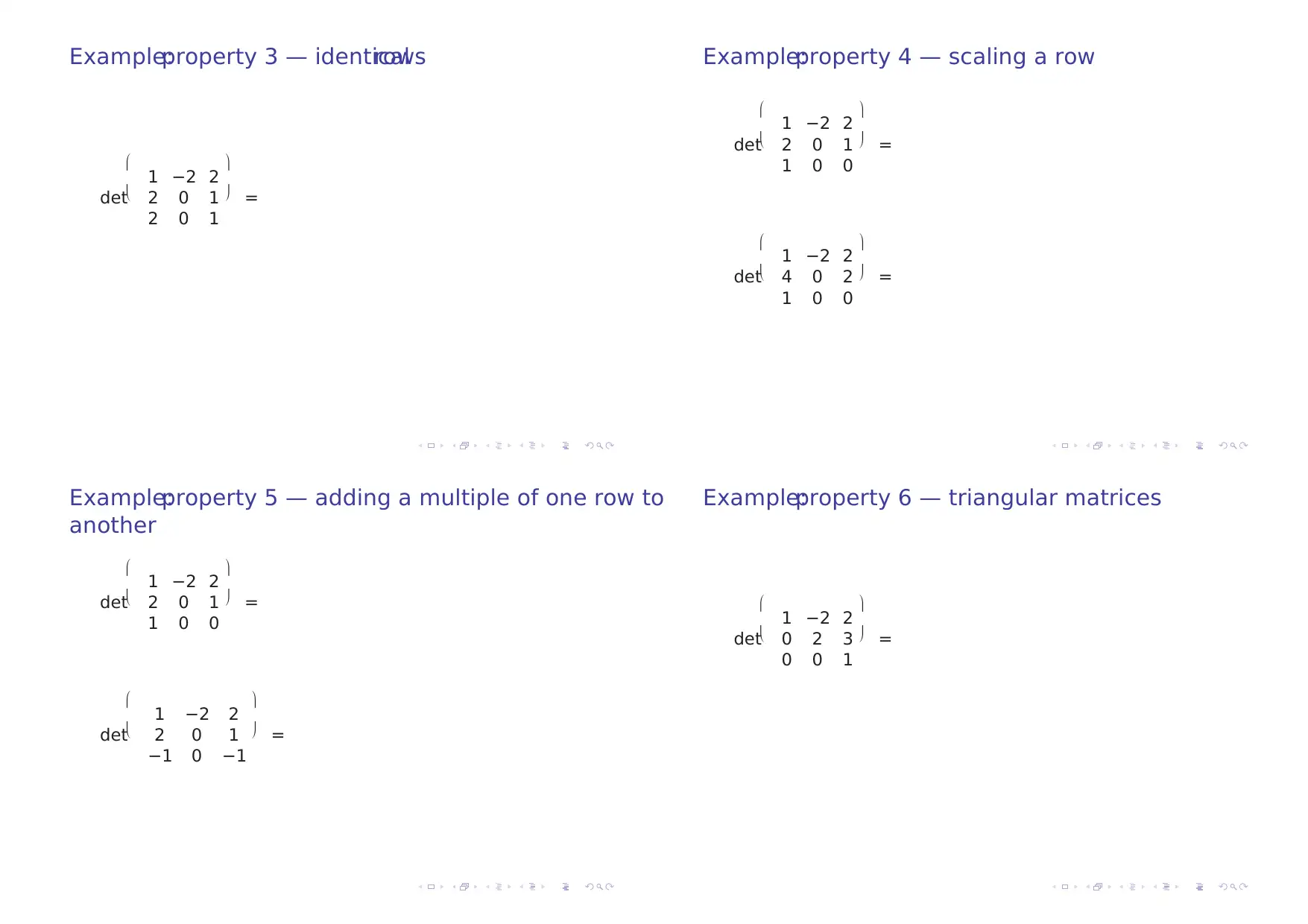
Example:property 3 — identicalrows
det
1 −2 2
2 0 1
2 0 1
=
Example:property 4 — scaling a row
det
1 −2 2
2 0 1
1 0 0
=
det
1 −2 2
4 0 2
1 0 0
=
Example:property 5 — adding a multiple of one row to
another
det
1 −2 2
2 0 1
1 0 0
=
det
1 −2 2
2 0 1
−1 0 −1
=
Example:property 6 — triangular matrices
det
1 −2 2
0 2 3
0 0 1
=
det
1 −2 2
2 0 1
2 0 1
=
Example:property 4 — scaling a row
det
1 −2 2
2 0 1
1 0 0
=
det
1 −2 2
4 0 2
1 0 0
=
Example:property 5 — adding a multiple of one row to
another
det
1 −2 2
2 0 1
1 0 0
=
det
1 −2 2
2 0 1
−1 0 −1
=
Example:property 6 — triangular matrices
det
1 −2 2
0 2 3
0 0 1
=
Example:property 5 — adding a multiple of one row to
another
det
1 −2 2
0 2 3
0 0 1
det
1 −2 2
2 0 1
1 0 0
=
det
1 −2 2
0 2 3
0 0 1
1 −2 2
2 0 1
1 0 0
=
Lecture 5
Solving systems of equations.Part I
This materialis covered in Section 3.5 of the course notes.
Recap (Lecture 4)
◮ det! a b
c d = ad − bc.
◮ For and n × n matrix A:
◮ the i , j -cofactor Ai ,j is (−1)i +j times determinant after
deleting row iand column j; and
◮ det(A) is the sum along any row or column of the entry times
the cofactor.That is, for any fixed k ≤ n,
det(A) =P n
j=1 ak ,jAk ,j = P n
i=1 ai ,kAi ,k.
◮ The determinant has the following properties:
◮ Unchanged by transpose or adding a multiple of one row to
another or one column to another.
◮ sign changes after swapping two rows or two columns.
◮ zero if one row or one column is a multiple of another.
◮ scaled by k after multiplying a row or a column by k.
◮ equalto product of diagonalentries if A is triangular.
Systems as matrix equations.
The system
3x1 + x2 − 2x3 = 1
−x1 + 2x2 + 2x3 = 3
5x2 − x3 = 0
can be written as a matrix equation:
3 1 −2
−1 2 2
0 5 −1
x1
x2
x3
=
1
3
0
Why?
3 1 −2
−1 2 2
0 5 −1
x1
x2
x3
=
another
det
1 −2 2
0 2 3
0 0 1
det
1 −2 2
2 0 1
1 0 0
=
det
1 −2 2
0 2 3
0 0 1
1 −2 2
2 0 1
1 0 0
=
Lecture 5
Solving systems of equations.Part I
This materialis covered in Section 3.5 of the course notes.
Recap (Lecture 4)
◮ det! a b
c d = ad − bc.
◮ For and n × n matrix A:
◮ the i , j -cofactor Ai ,j is (−1)i +j times determinant after
deleting row iand column j; and
◮ det(A) is the sum along any row or column of the entry times
the cofactor.That is, for any fixed k ≤ n,
det(A) =P n
j=1 ak ,jAk ,j = P n
i=1 ai ,kAi ,k.
◮ The determinant has the following properties:
◮ Unchanged by transpose or adding a multiple of one row to
another or one column to another.
◮ sign changes after swapping two rows or two columns.
◮ zero if one row or one column is a multiple of another.
◮ scaled by k after multiplying a row or a column by k.
◮ equalto product of diagonalentries if A is triangular.
Systems as matrix equations.
The system
3x1 + x2 − 2x3 = 1
−x1 + 2x2 + 2x3 = 3
5x2 − x3 = 0
can be written as a matrix equation:
3 1 −2
−1 2 2
0 5 −1
x1
x2
x3
=
1
3
0
Why?
3 1 −2
−1 2 2
0 5 −1
x1
x2
x3
=
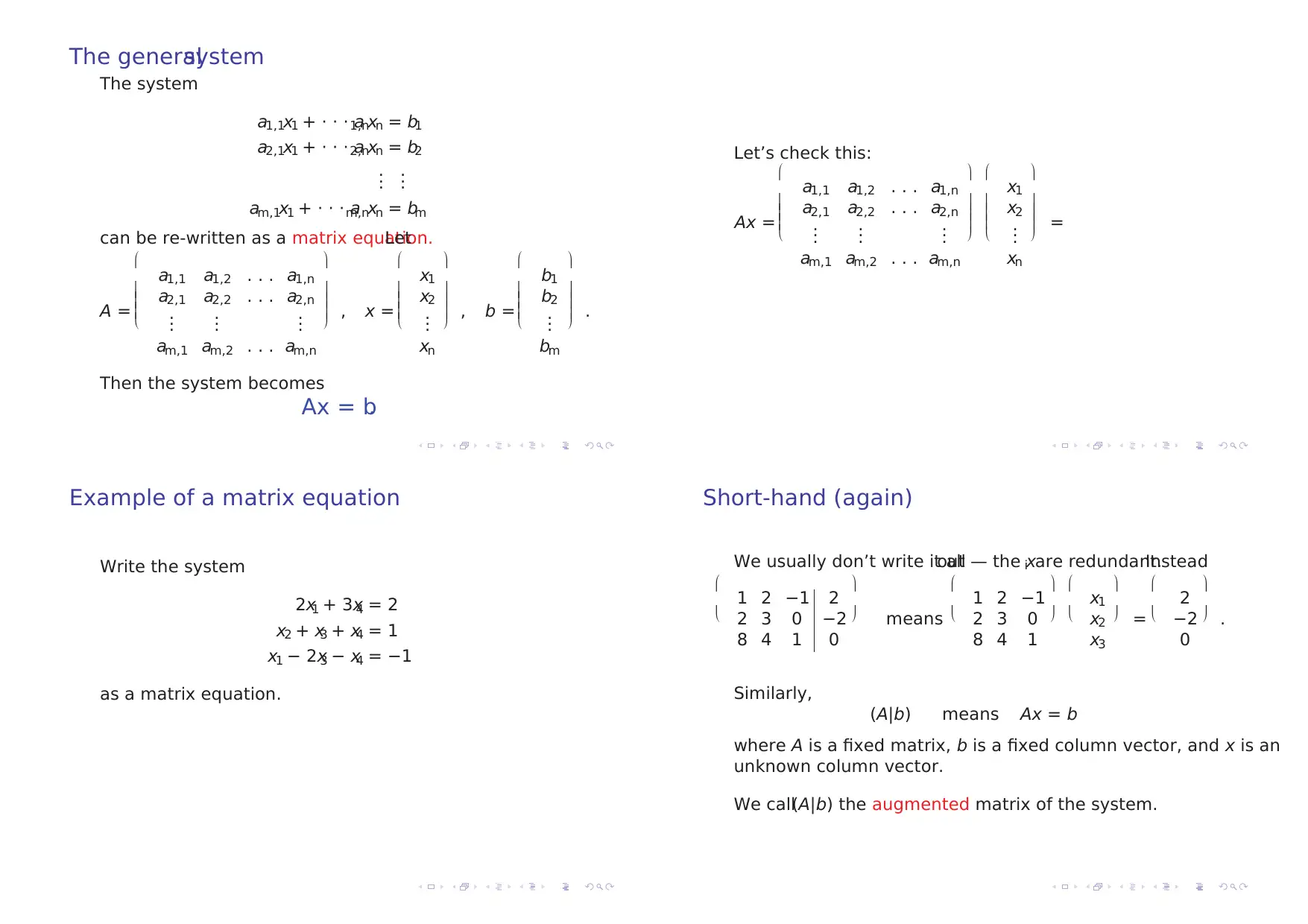
The generalsystem
The system
a1,1x1 + · · · a1,nxn = b1
a2,1x1 + · · · a2,nxn = b2
... ...
am,1x1 + · · · am,nxn = bm
can be re-written as a matrix equation.Let
A =
a1,1 a1,2 . . . a1,n
a2,1 a2,2 . . . a2,n
... ... ...
am,1 am,2 . . . am,n
, x =
x1
x2
...
xn
, b =
b1
b2
...
bm
.
Then the system becomes
Ax = b.
Let’s check this:
Ax =
a1,1 a1,2 . . . a1,n
a2,1 a2,2 . . . a2,n
... ... ...
am,1 am,2 . . . am,n
x1
x2
...
xn
=
Example of a matrix equation
Write the system
2x1 + 3x4 = 2
x2 + x3 + x4 = 1
x1 − 2x3 − x4 = −1
as a matrix equation.
Short-hand (again)
We usually don’t write it allout — the xi are redundant.Instead
1 2 −1 2
2 3 0 −2
8 4 1 0
means
1 2 −1
2 3 0
8 4 1
x1
x2
x3
=
2
−2
0
.
Similarly,
(A|b) means Ax = b
where A is a fixed matrix, b is a fixed column vector, and x is an
unknown column vector.
We call(A|b) the augmented matrix of the system.
The system
a1,1x1 + · · · a1,nxn = b1
a2,1x1 + · · · a2,nxn = b2
... ...
am,1x1 + · · · am,nxn = bm
can be re-written as a matrix equation.Let
A =
a1,1 a1,2 . . . a1,n
a2,1 a2,2 . . . a2,n
... ... ...
am,1 am,2 . . . am,n
, x =
x1
x2
...
xn
, b =
b1
b2
...
bm
.
Then the system becomes
Ax = b.
Let’s check this:
Ax =
a1,1 a1,2 . . . a1,n
a2,1 a2,2 . . . a2,n
... ... ...
am,1 am,2 . . . am,n
x1
x2
...
xn
=
Example of a matrix equation
Write the system
2x1 + 3x4 = 2
x2 + x3 + x4 = 1
x1 − 2x3 − x4 = −1
as a matrix equation.
Short-hand (again)
We usually don’t write it allout — the xi are redundant.Instead
1 2 −1 2
2 3 0 −2
8 4 1 0
means
1 2 −1
2 3 0
8 4 1
x1
x2
x3
=
2
−2
0
.
Similarly,
(A|b) means Ax = b
where A is a fixed matrix, b is a fixed column vector, and x is an
unknown column vector.
We call(A|b) the augmented matrix of the system.
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.
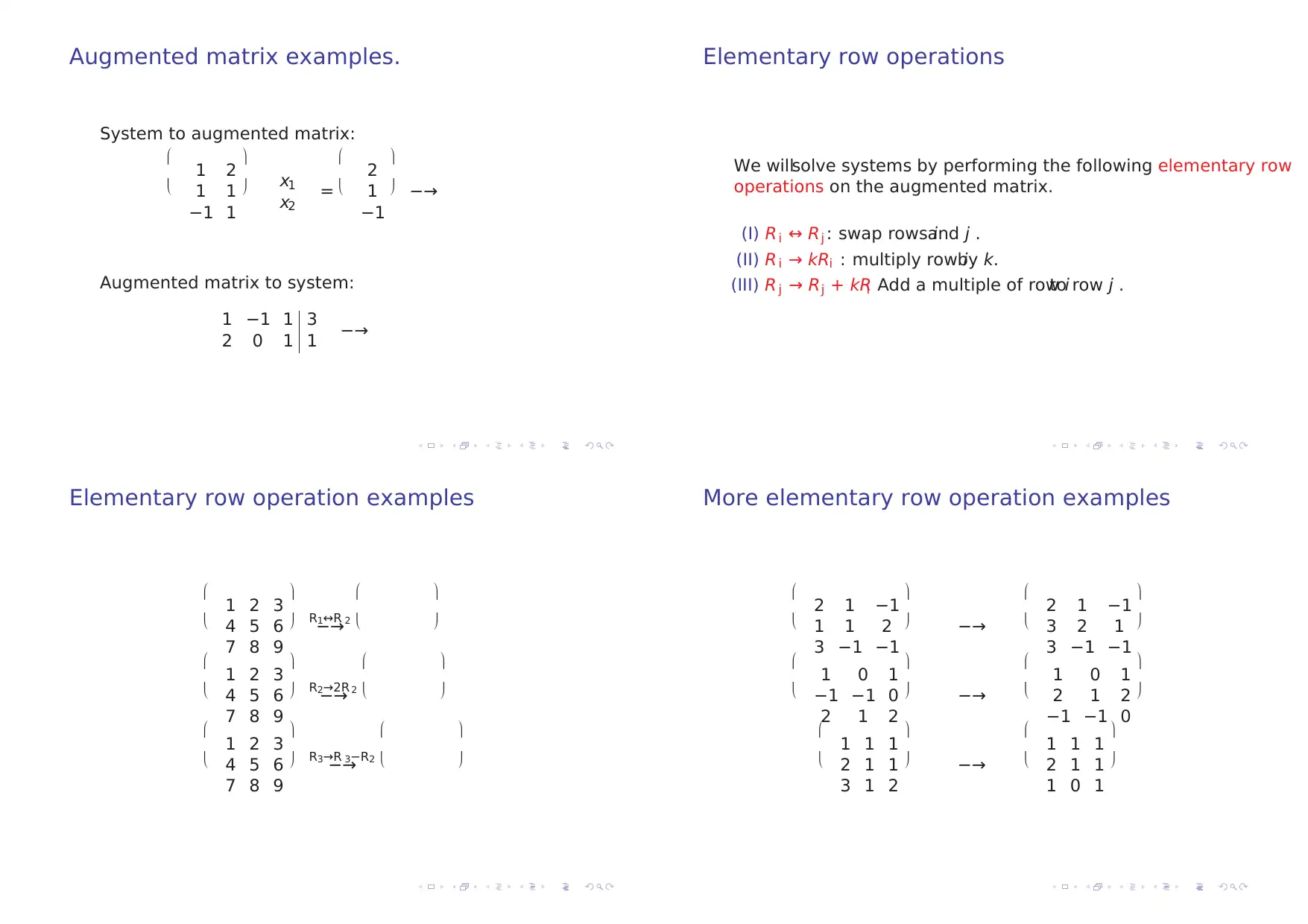
Augmented matrix examples.
System to augmented matrix:
1 2
1 1
−1 1
x1
x2
=
2
1
−1
−→
Augmented matrix to system:
1 −1 1 3
2 0 1 1 −→
Elementary row operations
We willsolve systems by performing the following elementary row
operations on the augmented matrix.
(I) Ri ↔ Rj : swap rows iand j .
(II) R i → kRi : multiply row iby k.
(III) R j → Rj + kRi Add a multiple of row ito row j .
Elementary row operation examples
1 2 3
4 5 6
7 8 9
R1↔R 2
−→
1 2 3
4 5 6
7 8 9
R2→2R 2
−→
1 2 3
4 5 6
7 8 9
R3→R 3−R2
−→
More elementary row operation examples
2 1 −1
1 1 2
3 −1 −1
−→
2 1 −1
3 2 1
3 −1 −1
1 0 1
−1 −1 0
2 1 2
−→
1 0 1
2 1 2
−1 −1 0
1 1 1
2 1 1
3 1 2
−→
1 1 1
2 1 1
1 0 1
System to augmented matrix:
1 2
1 1
−1 1
x1
x2
=
2
1
−1
−→
Augmented matrix to system:
1 −1 1 3
2 0 1 1 −→
Elementary row operations
We willsolve systems by performing the following elementary row
operations on the augmented matrix.
(I) Ri ↔ Rj : swap rows iand j .
(II) R i → kRi : multiply row iby k.
(III) R j → Rj + kRi Add a multiple of row ito row j .
Elementary row operation examples
1 2 3
4 5 6
7 8 9
R1↔R 2
−→
1 2 3
4 5 6
7 8 9
R2→2R 2
−→
1 2 3
4 5 6
7 8 9
R3→R 3−R2
−→
More elementary row operation examples
2 1 −1
1 1 2
3 −1 −1
−→
2 1 −1
3 2 1
3 −1 −1
1 0 1
−1 −1 0
2 1 2
−→
1 0 1
2 1 2
−1 −1 0
1 1 1
2 1 1
3 1 2
−→
1 1 1
2 1 1
1 0 1
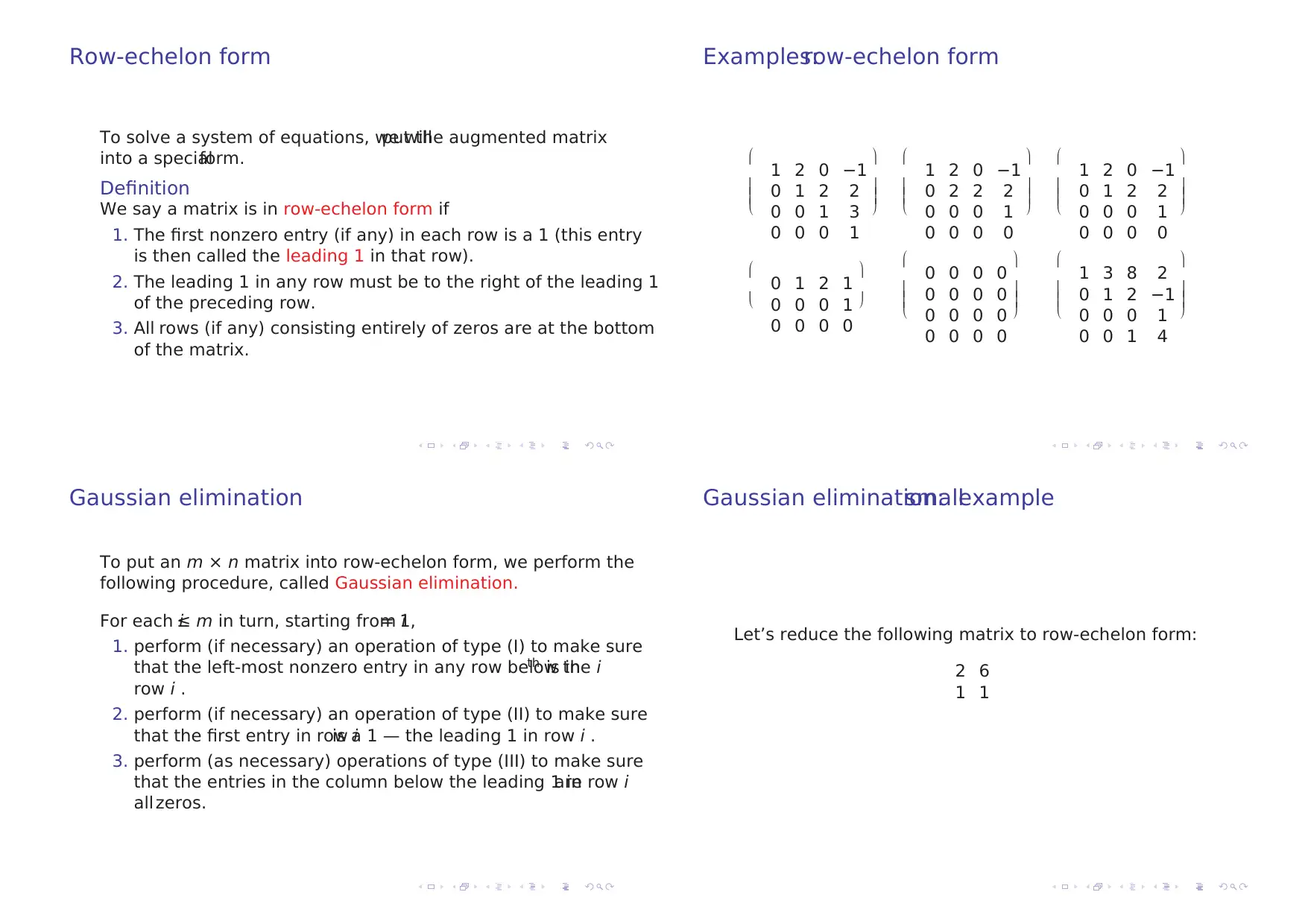
Row-echelon form
To solve a system of equations, we willput the augmented matrix
into a specialform.
Definition
We say a matrix is in row-echelon form if
1. The first nonzero entry (if any) in each row is a 1 (this entry
is then called the leading 1 in that row).
2. The leading 1 in any row must be to the right of the leading 1
of the preceding row.
3. All rows (if any) consisting entirely of zeros are at the bottom
of the matrix.
Examples:row-echelon form
1 2 0 −1
0 1 2 2
0 0 1 3
0 0 0 1
1 2 0 −1
0 2 2 2
0 0 0 1
0 0 0 0
1 2 0 −1
0 1 2 2
0 0 0 1
0 0 0 0
0 1 2 1
0 0 0 1
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
1 3 8 2
0 1 2 −1
0 0 0 1
0 0 1 4
Gaussian elimination
To put an m × n matrix into row-echelon form, we perform the
following procedure, called Gaussian elimination.
For each i≤ m in turn, starting from i= 1,
1. perform (if necessary) an operation of type (I) to make sure
that the left-most nonzero entry in any row below the ith is in
row i .
2. perform (if necessary) an operation of type (II) to make sure
that the first entry in row iis a 1 — the leading 1 in row i .
3. perform (as necessary) operations of type (III) to make sure
that the entries in the column below the leading 1 in row iare
all zeros.
Gaussian elimination:smallexample
Let’s reduce the following matrix to row-echelon form:
2 6
1 1
To solve a system of equations, we willput the augmented matrix
into a specialform.
Definition
We say a matrix is in row-echelon form if
1. The first nonzero entry (if any) in each row is a 1 (this entry
is then called the leading 1 in that row).
2. The leading 1 in any row must be to the right of the leading 1
of the preceding row.
3. All rows (if any) consisting entirely of zeros are at the bottom
of the matrix.
Examples:row-echelon form
1 2 0 −1
0 1 2 2
0 0 1 3
0 0 0 1
1 2 0 −1
0 2 2 2
0 0 0 1
0 0 0 0
1 2 0 −1
0 1 2 2
0 0 0 1
0 0 0 0
0 1 2 1
0 0 0 1
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
1 3 8 2
0 1 2 −1
0 0 0 1
0 0 1 4
Gaussian elimination
To put an m × n matrix into row-echelon form, we perform the
following procedure, called Gaussian elimination.
For each i≤ m in turn, starting from i= 1,
1. perform (if necessary) an operation of type (I) to make sure
that the left-most nonzero entry in any row below the ith is in
row i .
2. perform (if necessary) an operation of type (II) to make sure
that the first entry in row iis a 1 — the leading 1 in row i .
3. perform (as necessary) operations of type (III) to make sure
that the entries in the column below the leading 1 in row iare
all zeros.
Gaussian elimination:smallexample
Let’s reduce the following matrix to row-echelon form:
2 6
1 1
Gaussian elimination:big example
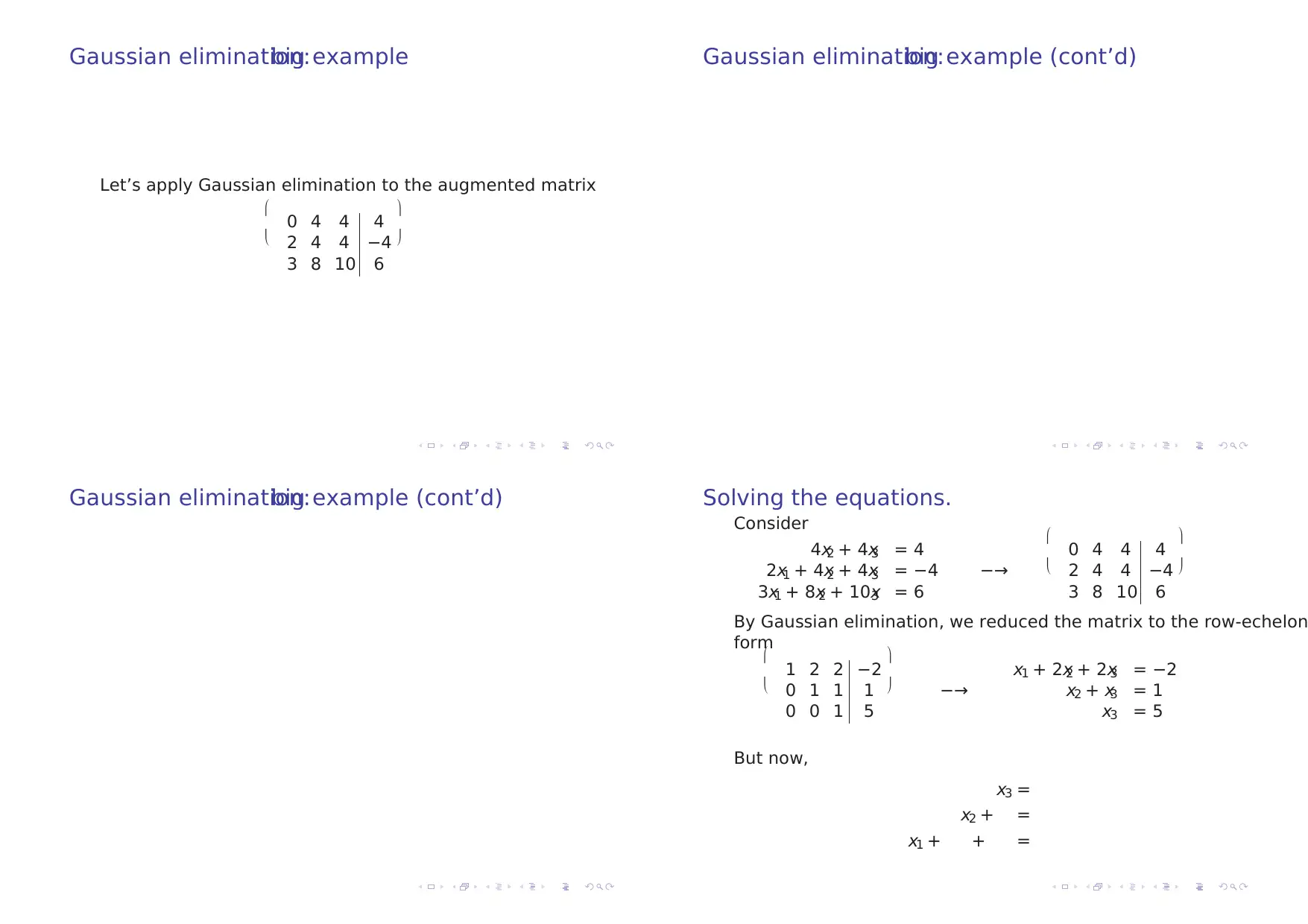
Let’s apply Gaussian elimination to the augmented matrix
0 4 4 4
2 4 4 −4
3 8 10 6
Gaussian elimination:big example (cont’d)
Gaussian elimination:big example (cont’d) Solving the equations.
Consider
4x2 + 4x3 = 4
2x1 + 4x2 + 4x3 = −4
3x1 + 8x2 + 10x3 = 6
−→
0 4 4 4
2 4 4 −4
3 8 10 6
By Gaussian elimination, we reduced the matrix to the row-echelon
form
1 2 2 −2
0 1 1 1
0 0 1 5
−→
x1 + 2x2 + 2x3 = −2
x2 + x3 = 1
x3 = 5
But now,
x3 =
x2 + =
x1 + + =
Let’s apply Gaussian elimination to the augmented matrix
0 4 4 4
2 4 4 −4
3 8 10 6
Gaussian elimination:big example (cont’d)
Gaussian elimination:big example (cont’d) Solving the equations.
Consider
4x2 + 4x3 = 4
2x1 + 4x2 + 4x3 = −4
3x1 + 8x2 + 10x3 = 6
−→
0 4 4 4
2 4 4 −4
3 8 10 6
By Gaussian elimination, we reduced the matrix to the row-echelon
form
1 2 2 −2
0 1 1 1
0 0 1 5
−→
x1 + 2x2 + 2x3 = −2
x2 + x3 = 1
x3 = 5
But now,
x3 =
x2 + =
x1 + + =
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
Why does it work?
Definition
Two matrices A and B are said to be row-equivalent if there is a
sequence of elementary row operations that can be applied to A to
obtain B.
Proposition
Suppose that the augmented matrices (A|b) and (A′ |b′ ) are row
equivalent.Then a column vector x is a solution to Ax = b if and
only if it is a solution to A′ x = b′ .
Lecture 6
Solving systems of equations.Part II
This materialis covered in Sections 3.6–3.8 of the course notes.
Recap (Lecture 5)
◮ System
P n
j=1 ai ,jxj = bi (1 ≤ i≤ m) ↔ matrix equation
Ax = b.
◮ shorthand:the augmented matrix is (A|b).
◮ Row-echelon form:
◮ leading nonzero entries are 1;
◮ each leading 1 to the right of preceding one.
◮ all zero rows at the bottom.
◮ Gaussian elimination or row-reduction uses elementary row
operations —
(I) Ri ↔ Rj , (II) Ri → kRi , (III) Rj → Rj + kRi ,
— to reduce to row-echelon form.
◮ Once (A|b) is in row-echelon form, the solution to the system
is easily found.
◮ Key fact:elementary row operations do not change the
solutions of a system.
Elementary Matrices
Definition
An elementary matrix is any matrix which can be obtained by
performing a single elementary row operation on the identity
matrix.
Examples.
Definition
Two matrices A and B are said to be row-equivalent if there is a
sequence of elementary row operations that can be applied to A to
obtain B.
Proposition
Suppose that the augmented matrices (A|b) and (A′ |b′ ) are row
equivalent.Then a column vector x is a solution to Ax = b if and
only if it is a solution to A′ x = b′ .
Lecture 6
Solving systems of equations.Part II
This materialis covered in Sections 3.6–3.8 of the course notes.
Recap (Lecture 5)
◮ System
P n
j=1 ai ,jxj = bi (1 ≤ i≤ m) ↔ matrix equation
Ax = b.
◮ shorthand:the augmented matrix is (A|b).
◮ Row-echelon form:
◮ leading nonzero entries are 1;
◮ each leading 1 to the right of preceding one.
◮ all zero rows at the bottom.
◮ Gaussian elimination or row-reduction uses elementary row
operations —
(I) Ri ↔ Rj , (II) Ri → kRi , (III) Rj → Rj + kRi ,
— to reduce to row-echelon form.
◮ Once (A|b) is in row-echelon form, the solution to the system
is easily found.
◮ Key fact:elementary row operations do not change the
solutions of a system.
Elementary Matrices
Definition
An elementary matrix is any matrix which can be obtained by
performing a single elementary row operation on the identity
matrix.
Examples.
Elementary row operations and elementary matrices
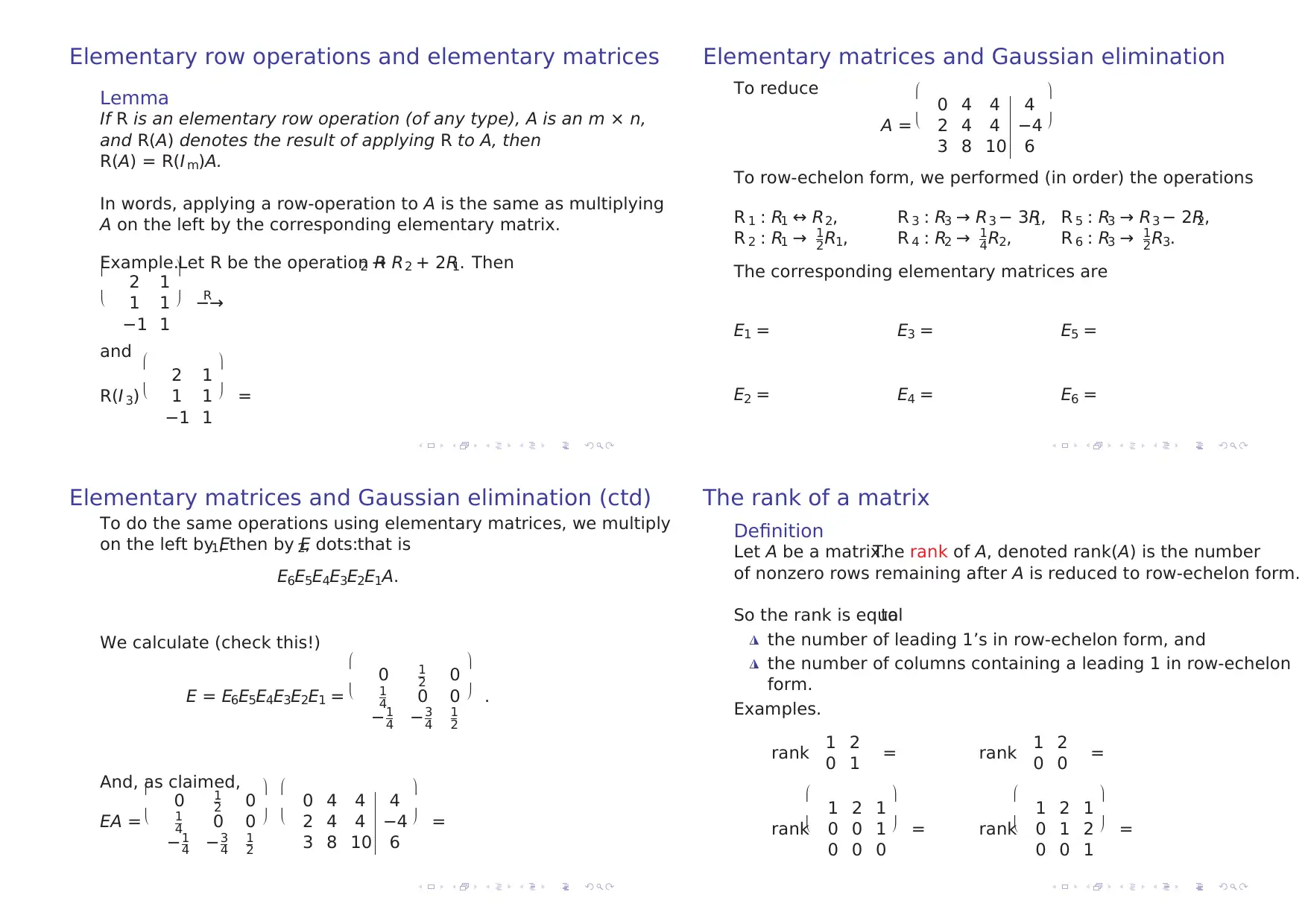
Lemma
If R is an elementary row operation (of any type), A is an m × n,
and R(A) denotes the result of applying R to A, then
R(A) = R(I m)A.
In words, applying a row-operation to A is the same as multiplying
A on the left by the corresponding elementary matrix.
Example.Let R be the operation R2 → R2 + 2R1. Then
2 1
1 1
−1 1
R
−→
and
R(I 3)
2 1
1 1
−1 1
=
Elementary matrices and Gaussian elimination
To reduce
A =
0 4 4 4
2 4 4 −4
3 8 10 6
To row-echelon form, we performed (in order) the operations
R 1 : R1 ↔ R2,
R 2 : R1 → 1
2R1,
R 3 : R3 → R3 − 3R1,
R 4 : R2 → 1
4R2,
R 5 : R3 → R3 − 2R2,
R 6 : R3 → 1
2R3.
The corresponding elementary matrices are
E1 =
E2 =
E3 =
E4 =
E5 =
E6 =
Elementary matrices and Gaussian elimination (ctd)
To do the same operations using elementary matrices, we multiply
on the left by E1, then by E2, dots:that is
E6E5E4E3E2E1A.
We calculate (check this!)
E = E6E5E4E3E2E1 =
0 1
2 0
1
4 0 0
−1
4 −3
4
1
2
.
And, as claimed,
EA =
0 1
2 0
1
4 0 0
−1
4 −3
4
1
2
0 4 4 4
2 4 4 −4
3 8 10 6
=
The rank of a matrix
Definition
Let A be a matrix.The rank of A, denoted rank(A) is the number
of nonzero rows remaining after A is reduced to row-echelon form.
So the rank is equalto
◮ the number of leading 1’s in row-echelon form, and
◮ the number of columns containing a leading 1 in row-echelon
form.
Examples.
rank 1 2
0 1 = rank 1 2
0 0 =
rank
1 2 1
0 0 1
0 0 0
= rank
1 2 1
0 1 2
0 0 1
=
Lemma
If R is an elementary row operation (of any type), A is an m × n,
and R(A) denotes the result of applying R to A, then
R(A) = R(I m)A.
In words, applying a row-operation to A is the same as multiplying
A on the left by the corresponding elementary matrix.
Example.Let R be the operation R2 → R2 + 2R1. Then
2 1
1 1
−1 1
R
−→
and
R(I 3)
2 1
1 1
−1 1
=
Elementary matrices and Gaussian elimination
To reduce
A =
0 4 4 4
2 4 4 −4
3 8 10 6
To row-echelon form, we performed (in order) the operations
R 1 : R1 ↔ R2,
R 2 : R1 → 1
2R1,
R 3 : R3 → R3 − 3R1,
R 4 : R2 → 1
4R2,
R 5 : R3 → R3 − 2R2,
R 6 : R3 → 1
2R3.
The corresponding elementary matrices are
E1 =
E2 =
E3 =
E4 =
E5 =
E6 =
Elementary matrices and Gaussian elimination (ctd)
To do the same operations using elementary matrices, we multiply
on the left by E1, then by E2, dots:that is
E6E5E4E3E2E1A.
We calculate (check this!)
E = E6E5E4E3E2E1 =
0 1
2 0
1
4 0 0
−1
4 −3
4
1
2
.
And, as claimed,
EA =
0 1
2 0
1
4 0 0
−1
4 −3
4
1
2
0 4 4 4
2 4 4 −4
3 8 10 6
=
The rank of a matrix
Definition
Let A be a matrix.The rank of A, denoted rank(A) is the number
of nonzero rows remaining after A is reduced to row-echelon form.
So the rank is equalto
◮ the number of leading 1’s in row-echelon form, and
◮ the number of columns containing a leading 1 in row-echelon
form.
Examples.
rank 1 2
0 1 = rank 1 2
0 0 =
rank
1 2 1
0 0 1
0 0 0
= rank
1 2 1
0 1 2
0 0 1
=
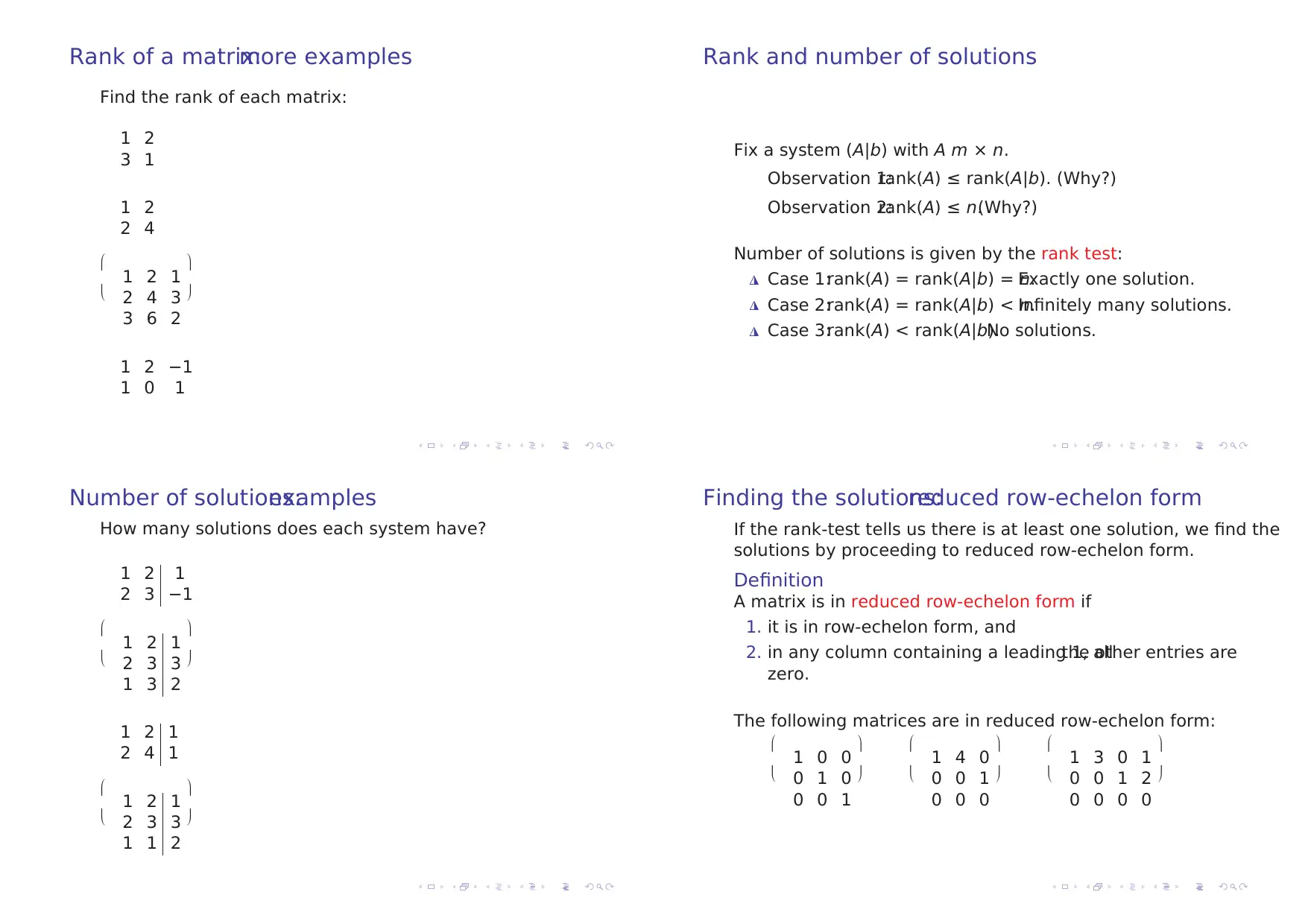
Rank of a matrix:more examples
Find the rank of each matrix:
1 2
3 1
1 2
2 4
1 2 1
2 4 3
3 6 2
1 2 −1
1 0 1
Rank and number of solutions
Fix a system (A|b) with A m × n.
Observation 1:rank(A) ≤ rank(A|b). (Why?)
Observation 2:rank(A) ≤ n.(Why?)
Number of solutions is given by the rank test:
◮ Case 1:rank(A) = rank(A|b) = n.Exactly one solution.
◮ Case 2:rank(A) = rank(A|b) < n.Infinitely many solutions.
◮ Case 3:rank(A) < rank(A|b).No solutions.
Number of solutions:examples
How many solutions does each system have?
1 2 1
2 3 −1
1 2 1
2 3 3
1 3 2
1 2 1
2 4 1
1 2 1
2 3 3
1 1 2
Finding the solutions:reduced row-echelon form
If the rank-test tells us there is at least one solution, we find the
solutions by proceeding to reduced row-echelon form.
Definition
A matrix is in reduced row-echelon form if
1. it is in row-echelon form, and
2. in any column containing a leading 1, allthe other entries are
zero.
The following matrices are in reduced row-echelon form:
1 0 0
0 1 0
0 0 1
1 4 0
0 0 1
0 0 0
1 3 0 1
0 0 1 2
0 0 0 0
Find the rank of each matrix:
1 2
3 1
1 2
2 4
1 2 1
2 4 3
3 6 2
1 2 −1
1 0 1
Rank and number of solutions
Fix a system (A|b) with A m × n.
Observation 1:rank(A) ≤ rank(A|b). (Why?)
Observation 2:rank(A) ≤ n.(Why?)
Number of solutions is given by the rank test:
◮ Case 1:rank(A) = rank(A|b) = n.Exactly one solution.
◮ Case 2:rank(A) = rank(A|b) < n.Infinitely many solutions.
◮ Case 3:rank(A) < rank(A|b).No solutions.
Number of solutions:examples
How many solutions does each system have?
1 2 1
2 3 −1
1 2 1
2 3 3
1 3 2
1 2 1
2 4 1
1 2 1
2 3 3
1 1 2
Finding the solutions:reduced row-echelon form
If the rank-test tells us there is at least one solution, we find the
solutions by proceeding to reduced row-echelon form.
Definition
A matrix is in reduced row-echelon form if
1. it is in row-echelon form, and
2. in any column containing a leading 1, allthe other entries are
zero.
The following matrices are in reduced row-echelon form:
1 0 0
0 1 0
0 0 1
1 4 0
0 0 1
0 0 0
1 3 0 1
0 0 1 2
0 0 0 0
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.
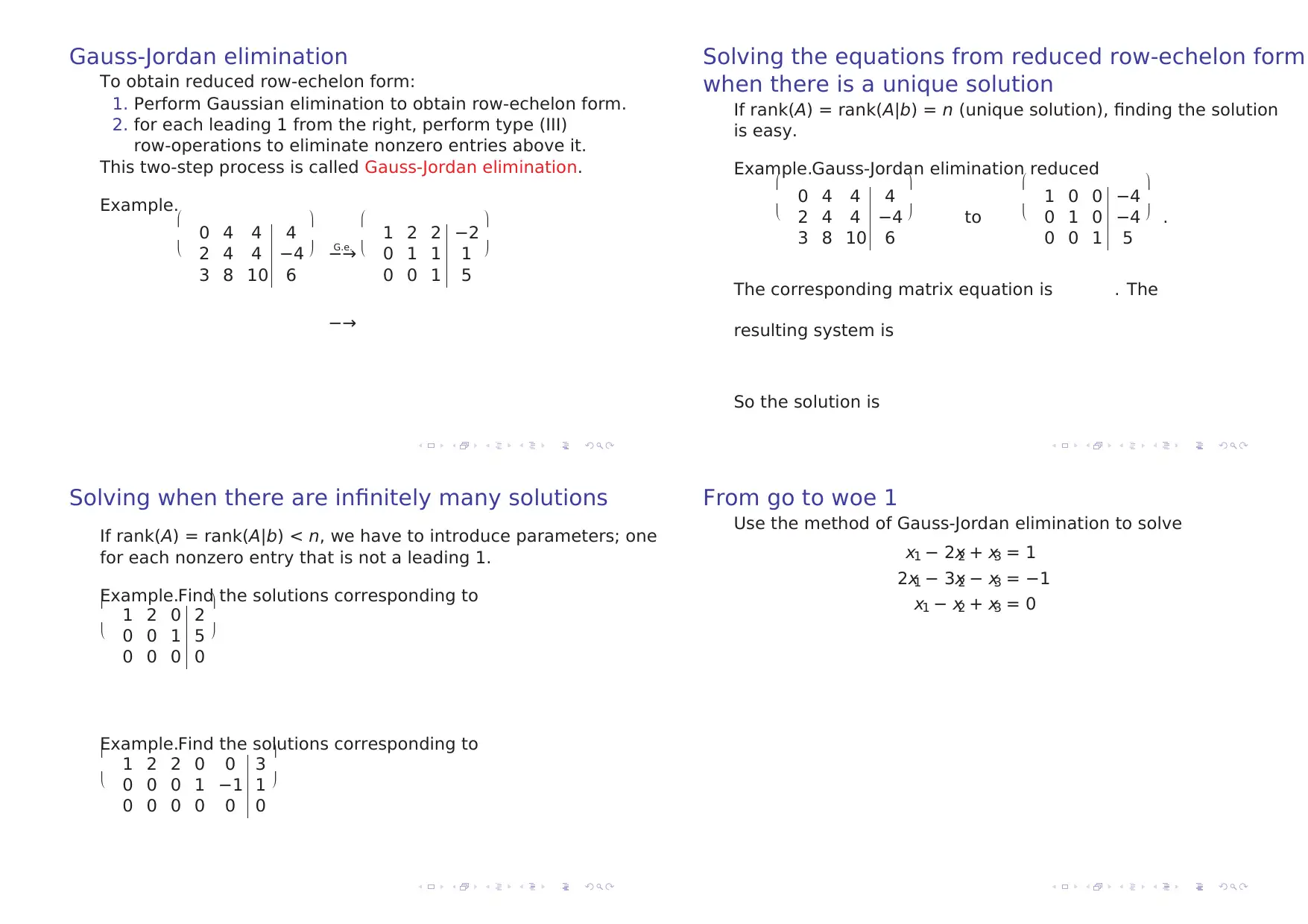
Gauss-Jordan elimination
To obtain reduced row-echelon form:
1. Perform Gaussian elimination to obtain row-echelon form.
2. for each leading 1 from the right, perform type (III)
row-operations to eliminate nonzero entries above it.
This two-step process is called Gauss-Jordan elimination.
Example.
0 4 4 4
2 4 4 −4
3 8 10 6
G.e.
−→
1 2 2 −2
0 1 1 1
0 0 1 5
−→
Solving the equations from reduced row-echelon form:
when there is a unique solution
If rank(A) = rank(A|b) = n (unique solution), finding the solution
is easy.
Example.Gauss-Jordan elimination reduced
0 4 4 4
2 4 4 −4
3 8 10 6
to
1 0 0 −4
0 1 0 −4
0 0 1 5
.
The corresponding matrix equation is . The
resulting system is
So the solution is
Solving when there are infinitely many solutions
If rank(A) = rank(A|b) < n, we have to introduce parameters; one
for each nonzero entry that is not a leading 1.
Example.Find the solutions corresponding to
1 2 0 2
0 0 1 5
0 0 0 0
Example.Find the solutions corresponding to
1 2 2 0 0 3
0 0 0 1 −1 1
0 0 0 0 0 0
From go to woe 1
Use the method of Gauss-Jordan elimination to solve
x1 − 2x2 + x3 = 1
2x1 − 3x2 − x3 = −1
x1 − x2 + x3 = 0
To obtain reduced row-echelon form:
1. Perform Gaussian elimination to obtain row-echelon form.
2. for each leading 1 from the right, perform type (III)
row-operations to eliminate nonzero entries above it.
This two-step process is called Gauss-Jordan elimination.
Example.
0 4 4 4
2 4 4 −4
3 8 10 6
G.e.
−→
1 2 2 −2
0 1 1 1
0 0 1 5
−→
Solving the equations from reduced row-echelon form:
when there is a unique solution
If rank(A) = rank(A|b) = n (unique solution), finding the solution
is easy.
Example.Gauss-Jordan elimination reduced
0 4 4 4
2 4 4 −4
3 8 10 6
to
1 0 0 −4
0 1 0 −4
0 0 1 5
.
The corresponding matrix equation is . The
resulting system is
So the solution is
Solving when there are infinitely many solutions
If rank(A) = rank(A|b) < n, we have to introduce parameters; one
for each nonzero entry that is not a leading 1.
Example.Find the solutions corresponding to
1 2 0 2
0 0 1 5
0 0 0 0
Example.Find the solutions corresponding to
1 2 2 0 0 3
0 0 0 1 −1 1
0 0 0 0 0 0
From go to woe 1
Use the method of Gauss-Jordan elimination to solve
x1 − 2x2 + x3 = 1
2x1 − 3x2 − x3 = −1
x1 − x2 + x3 = 0
From go to woe 1 (ctd) From go to woe 1 (ctd)
From go to woe 2
Use the method of Gauss-Jordan elimination to solve
x1 − 2x2 + x3 = 1
2x1 − 3x2 − x3 = −1
2x2 − 6x3 = −6
From go to woe 2 (ctd)
From go to woe 2
Use the method of Gauss-Jordan elimination to solve
x1 − 2x2 + x3 = 1
2x1 − 3x2 − x3 = −1
2x2 − 6x3 = −6
From go to woe 2 (ctd)
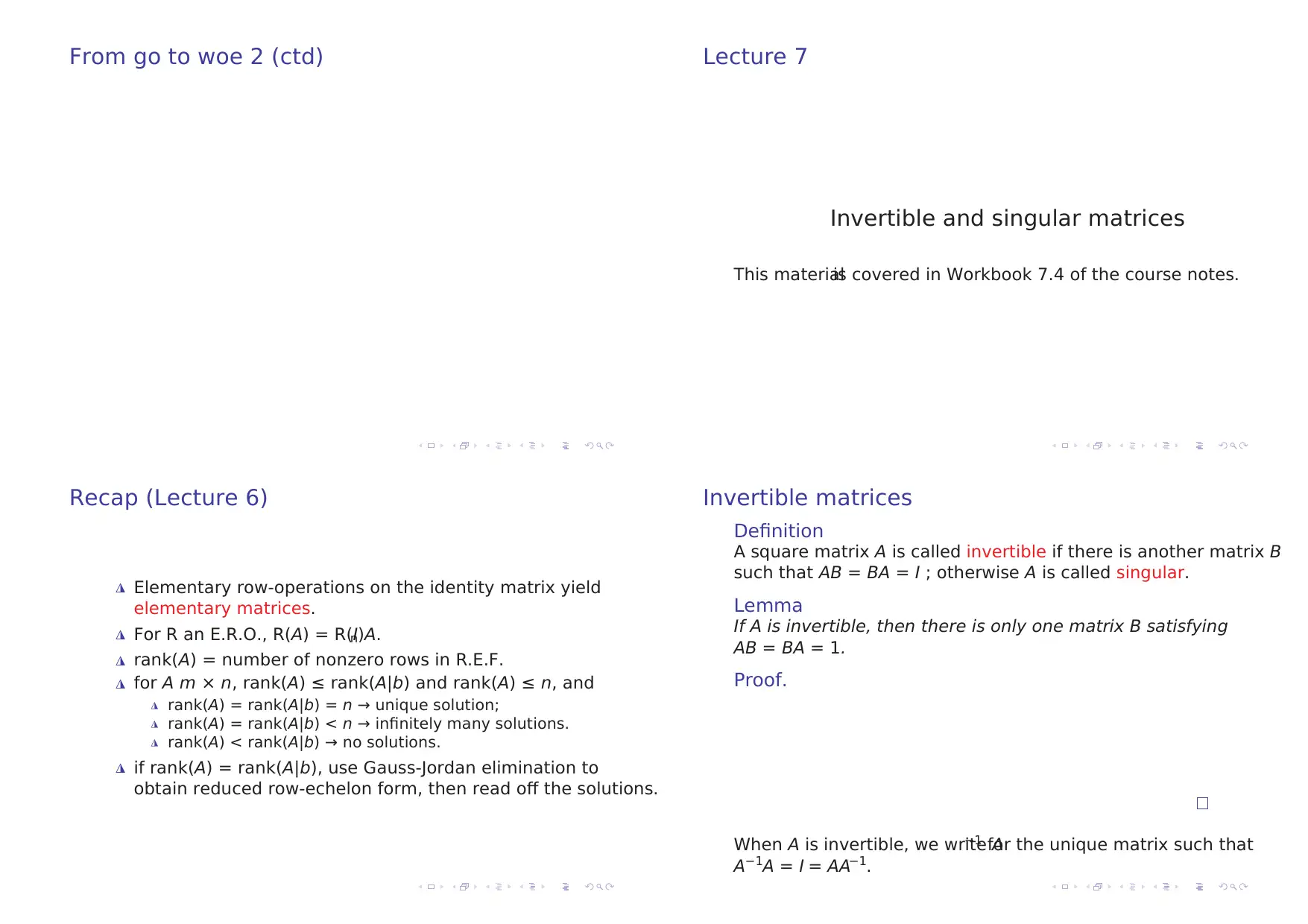
From go to woe 2 (ctd) Lecture 7
Invertible and singular matrices
This materialis covered in Workbook 7.4 of the course notes.
Recap (Lecture 6)
◮ Elementary row-operations on the identity matrix yield
elementary matrices.
◮ For R an E.R.O., R(A) = R(In)A.
◮ rank(A) = number of nonzero rows in R.E.F.
◮ for A m × n, rank(A) ≤ rank(A|b) and rank(A) ≤ n, and
◮ rank(A) = rank(A|b) = n → unique solution;
◮ rank(A) = rank(A|b) < n → infinitely many solutions.
◮ rank(A) < rank(A|b) → no solutions.
◮ if rank(A) = rank(A|b), use Gauss-Jordan elimination to
obtain reduced row-echelon form, then read off the solutions.
Invertible matrices
Definition
A square matrix A is called invertible if there is another matrix B
such that AB = BA = I ; otherwise A is called singular.
Lemma
If A is invertible, then there is only one matrix B satisfying
AB = BA = 1.
Proof.
When A is invertible, we write A−1 for the unique matrix such that
A−1A = I = AA−1.
Invertible and singular matrices
This materialis covered in Workbook 7.4 of the course notes.
Recap (Lecture 6)
◮ Elementary row-operations on the identity matrix yield
elementary matrices.
◮ For R an E.R.O., R(A) = R(In)A.
◮ rank(A) = number of nonzero rows in R.E.F.
◮ for A m × n, rank(A) ≤ rank(A|b) and rank(A) ≤ n, and
◮ rank(A) = rank(A|b) = n → unique solution;
◮ rank(A) = rank(A|b) < n → infinitely many solutions.
◮ rank(A) < rank(A|b) → no solutions.
◮ if rank(A) = rank(A|b), use Gauss-Jordan elimination to
obtain reduced row-echelon form, then read off the solutions.
Invertible matrices
Definition
A square matrix A is called invertible if there is another matrix B
such that AB = BA = I ; otherwise A is called singular.
Lemma
If A is invertible, then there is only one matrix B satisfying
AB = BA = 1.
Proof.
When A is invertible, we write A−1 for the unique matrix such that
A−1A = I = AA−1.
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser

Example:invertible matrix
The matrix
A = 1 1
2 4 is invertible with A−1 = 2 −1
2
−1 1
2
.
Check:
Elementary matrices are invertible
Every elementary matrix is invertible.The inverse is the elementary
matrix corresponding to the reverse row-operation.
For example, the row operation R2 → R2 + 2R1 corresponds to the
elementary matrix
The reverse row-operation is , so the inverse matrix
is
Products of invertible matrices
Lemma
Let A and B be invertible matrices.Then AB is also invertible
with inverse (AB)−1 = B−1A−1.
Proof.
Systems of equations and invertible matrices
Consider a system Ax = b, and suppose that A is invertible.Then
A−1Ax = A−1b, so Ix = A−1b; that is we can write down the
solution to the system straight away as x = A−1b.
Example.Recallthat
1 1
2 4
−1
= 2 −1
2
−1 1
2
Use this to solve the system
x1 + x2 = 3
2x1 + 4x2 = −1.
The matrix
A = 1 1
2 4 is invertible with A−1 = 2 −1
2
−1 1
2
.
Check:
Elementary matrices are invertible
Every elementary matrix is invertible.The inverse is the elementary
matrix corresponding to the reverse row-operation.
For example, the row operation R2 → R2 + 2R1 corresponds to the
elementary matrix
The reverse row-operation is , so the inverse matrix
is
Products of invertible matrices
Lemma
Let A and B be invertible matrices.Then AB is also invertible
with inverse (AB)−1 = B−1A−1.
Proof.
Systems of equations and invertible matrices
Consider a system Ax = b, and suppose that A is invertible.Then
A−1Ax = A−1b, so Ix = A−1b; that is we can write down the
solution to the system straight away as x = A−1b.
Example.Recallthat
1 1
2 4
−1
= 2 −1
2
−1 1
2
Use this to solve the system
x1 + x2 = 3
2x1 + 4x2 = −1.
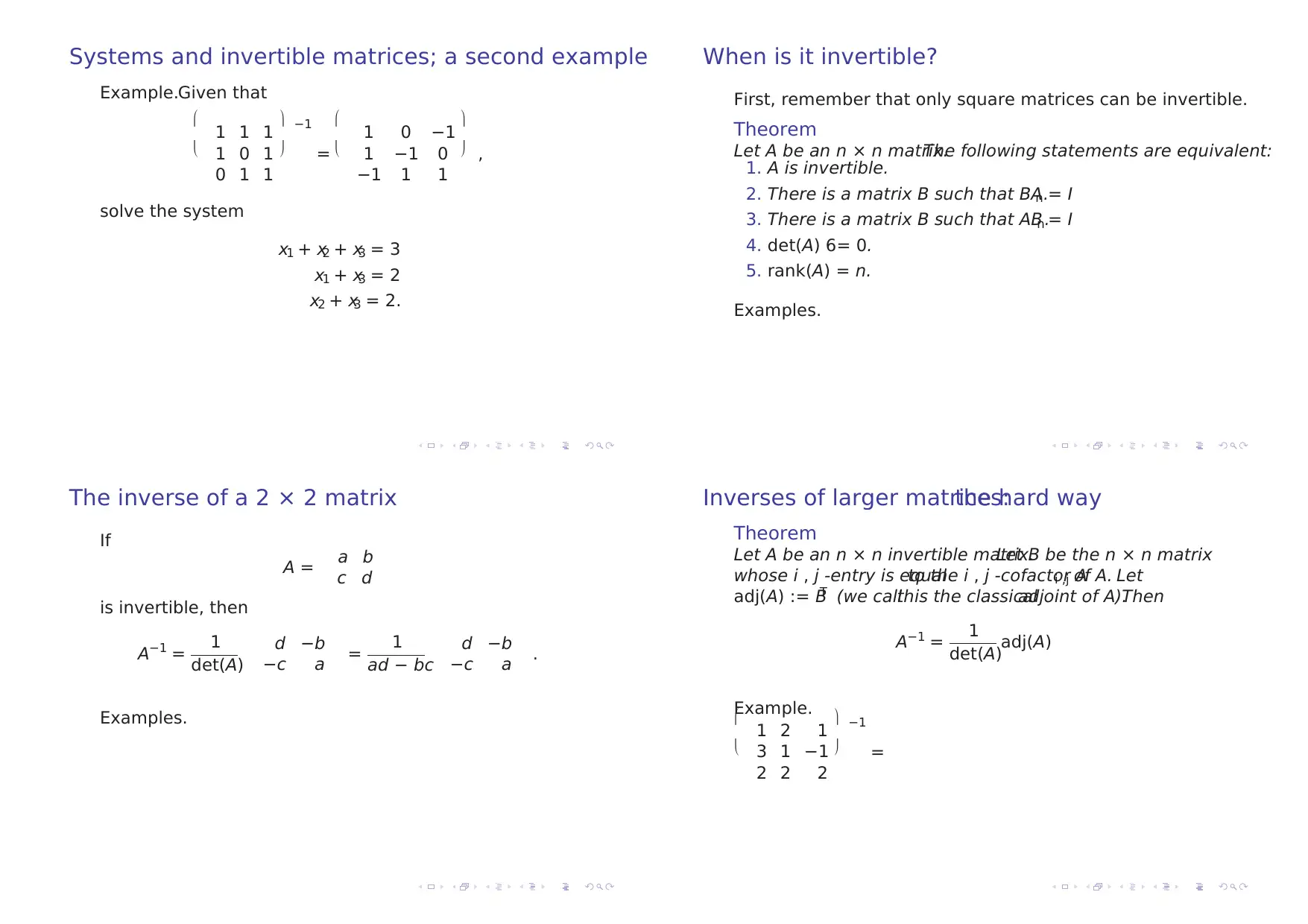
Systems and invertible matrices; a second example
Example.Given that
1 1 1
1 0 1
0 1 1
−1
=
1 0 −1
1 −1 0
−1 1 1
,
solve the system
x1 + x2 + x3 = 3
x1 + x3 = 2
x2 + x3 = 2.
When is it invertible?
First, remember that only square matrices can be invertible.
Theorem
Let A be an n × n matrix.The following statements are equivalent:
1. A is invertible.
2. There is a matrix B such that BA = In.
3. There is a matrix B such that AB = In.
4. det(A) 6= 0.
5. rank(A) = n.
Examples.
The inverse of a 2 × 2 matrix
If
A = a b
c d
is invertible, then
A−1 = 1
det(A)
d −b
−c a = 1
ad − bc
d −b
−c a .
Examples.
Inverses of larger matrices:the hard way
Theorem
Let A be an n × n invertible matrix.Let B be the n × n matrix
whose i , j -entry is equalto the i , j -cofactor Ai ,j of A. Let
adj(A) := BT (we callthis the classicaladjoint of A).Then
A−1 = 1
det(A)adj(A)
Example.
1 2 1
3 1 −1
2 2 2
−1
=
Example.Given that
1 1 1
1 0 1
0 1 1
−1
=
1 0 −1
1 −1 0
−1 1 1
,
solve the system
x1 + x2 + x3 = 3
x1 + x3 = 2
x2 + x3 = 2.
When is it invertible?
First, remember that only square matrices can be invertible.
Theorem
Let A be an n × n matrix.The following statements are equivalent:
1. A is invertible.
2. There is a matrix B such that BA = In.
3. There is a matrix B such that AB = In.
4. det(A) 6= 0.
5. rank(A) = n.
Examples.
The inverse of a 2 × 2 matrix
If
A = a b
c d
is invertible, then
A−1 = 1
det(A)
d −b
−c a = 1
ad − bc
d −b
−c a .
Examples.
Inverses of larger matrices:the hard way
Theorem
Let A be an n × n invertible matrix.Let B be the n × n matrix
whose i , j -entry is equalto the i , j -cofactor Ai ,j of A. Let
adj(A) := BT (we callthis the classicaladjoint of A).Then
A−1 = 1
det(A)adj(A)
Example.
1 2 1
3 1 −1
2 2 2
−1
=

Inverses the hard way (ctd) Inverses the easy way:Gaussian elimination
◮ ERO’s are left-multiplication by elementary matrices.
◮ So the whole process of Gauss-Jordan elimination turns A into
EA (E is the product of the elementary matrices).
◮ If A is n × n and rank(A) is n, then G-J elimination transforms
A to I .
◮ So EA = I .
◮ This forces E = A−1.
◮ But E = EI is obtained by applying the same ERO’s to I .
Inverses the easy way:Gaussian elimination (ctd)
Proposition
If a sequence of row-operations reduces A to the identity matrix I ,
then the same sequence of row operations applied to Iyields A−1.
So to find A−1, apply Gauss-Jordan elimination to (A|I ).
◮ If rank(A) = n, the result willbe (I |A−1).
◮ If rank(A) < n, then A is singular.
Example.To find
1 2 1
3 1 −1
2 2 2
−1
:
Inverses the easy way (ctd)
◮ ERO’s are left-multiplication by elementary matrices.
◮ So the whole process of Gauss-Jordan elimination turns A into
EA (E is the product of the elementary matrices).
◮ If A is n × n and rank(A) is n, then G-J elimination transforms
A to I .
◮ So EA = I .
◮ This forces E = A−1.
◮ But E = EI is obtained by applying the same ERO’s to I .
Inverses the easy way:Gaussian elimination (ctd)
Proposition
If a sequence of row-operations reduces A to the identity matrix I ,
then the same sequence of row operations applied to Iyields A−1.
So to find A−1, apply Gauss-Jordan elimination to (A|I ).
◮ If rank(A) = n, the result willbe (I |A−1).
◮ If rank(A) < n, then A is singular.
Example.To find
1 2 1
3 1 −1
2 2 2
−1
:
Inverses the easy way (ctd)
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.
Hooptedoodle:why Gauss-Jordan finds solutions
Suppose A is invertible.Consider Ax = b.The solution is
x = A−1b.
Since A is invertible, Gauss-Jordan elimination reduces A to I .Let
R 1, . . . Rk be the row-operations involved, and E1, . . . , Ek the
corresponding elementary matrices.
Then E = EkEk−1 . . . E1 satisfies EA = I ; so E = A−1.
So x = A−1b = Eb = EkEk−1 · · · E1b = Rk(R k−1(· · · R1(b))).
This is exactly the last column of (A|b) after Gauss-Jordan
elimination!
Suppose A is invertible.Consider Ax = b.The solution is
x = A−1b.
Since A is invertible, Gauss-Jordan elimination reduces A to I .Let
R 1, . . . Rk be the row-operations involved, and E1, . . . , Ek the
corresponding elementary matrices.
Then E = EkEk−1 . . . E1 satisfies EA = I ; so E = A−1.
So x = A−1b = Eb = EkEk−1 · · · E1b = Rk(R k−1(· · · R1(b))).
This is exactly the last column of (A|b) after Gauss-Jordan
elimination!
1 out of 29
Related Documents

Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
© 2024 | Zucol Services PVT LTD | All rights reserved.