Control Systems: Discrete & Robust Control Solutions
VerifiedAdded on 2022/08/20
|9
|1043
|264
Homework Assignment
AI Summary
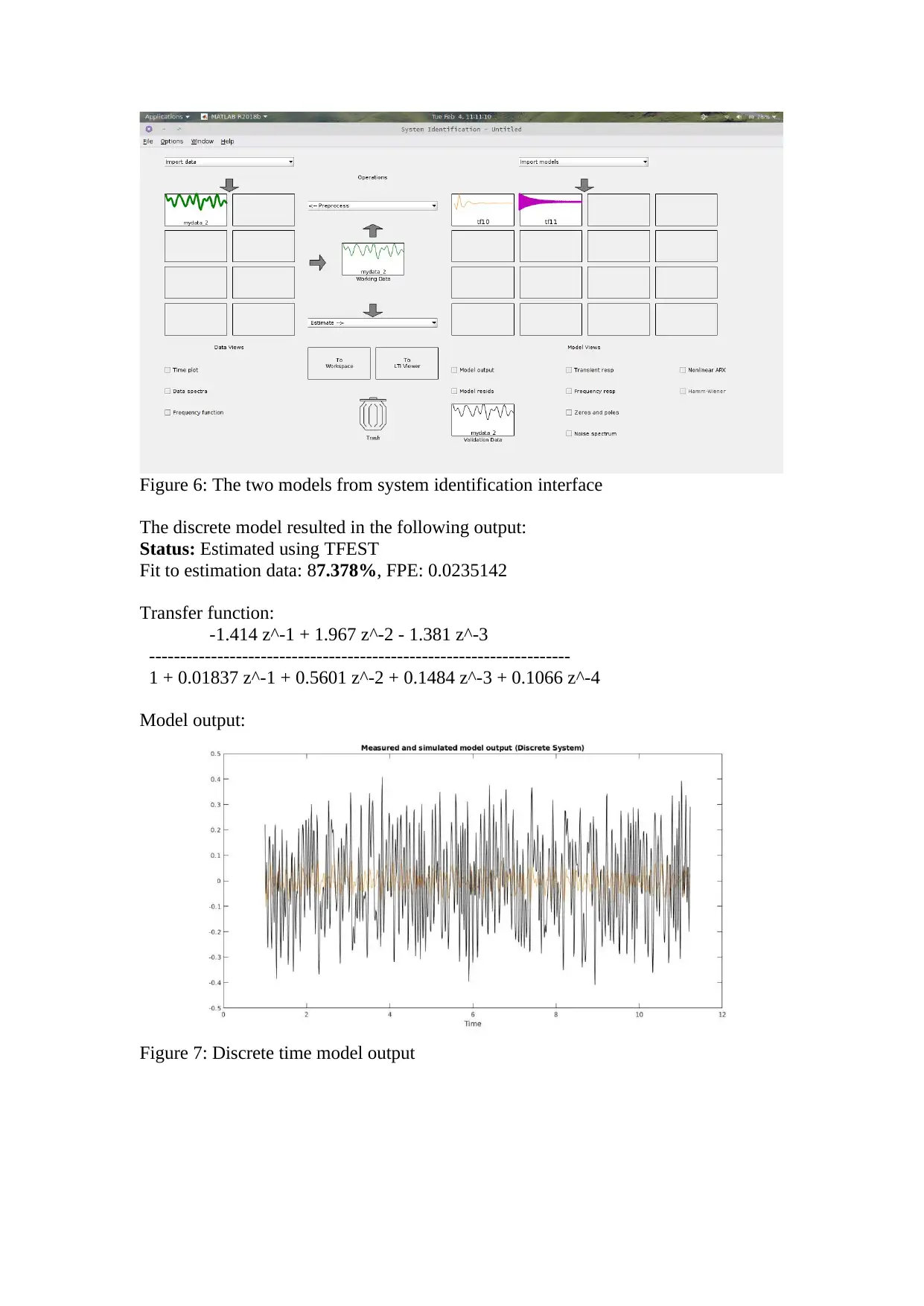
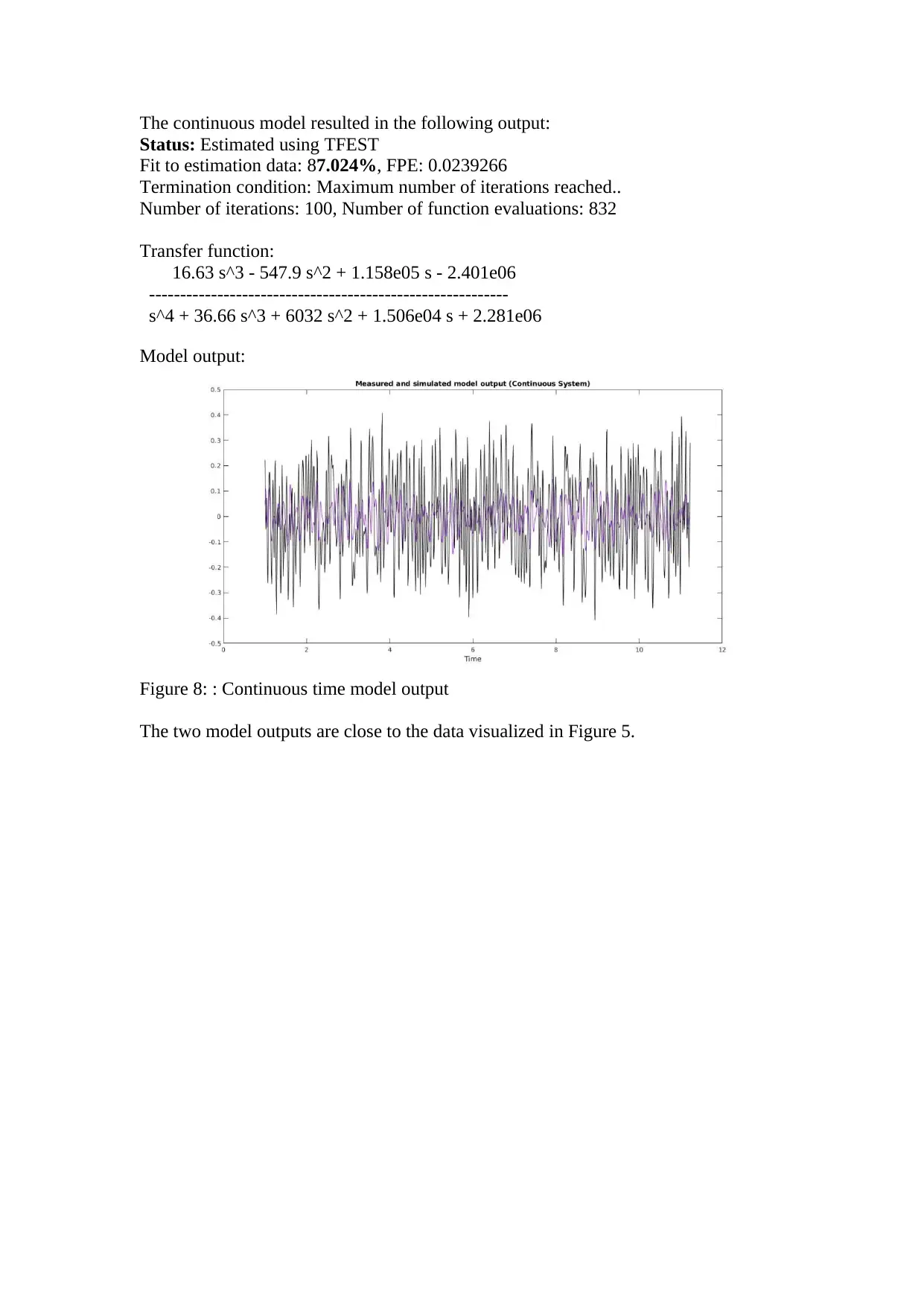
This document presents a comprehensive solution to a control systems assignment. The solution begins with the discretization of a linear system, deriving the F and Q matrices for the discrete-time state equations. It then addresses the conversion of a difference equation into a state-space representation. The core of the solution involves the design of a robust sliding mode controller for a linear time-invariant (LTI) system, including the derivation of the controller equation and simulation results using MATLAB. Finally, the assignment explores system identification techniques applied to a robotic arm modeled as a second-order system, presenting both discrete and continuous-time transfer function models derived from experimental data and system identification toolbox, along with their respective outputs. The solution demonstrates the application of various control techniques and modeling approaches.



1 out of 9
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2025 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.