MATLAB functions for distance conversion, time conversion, and quadratic equation roots
VerifiedAdded on 2023/05/30
|11
|2073
|157
AI Summary
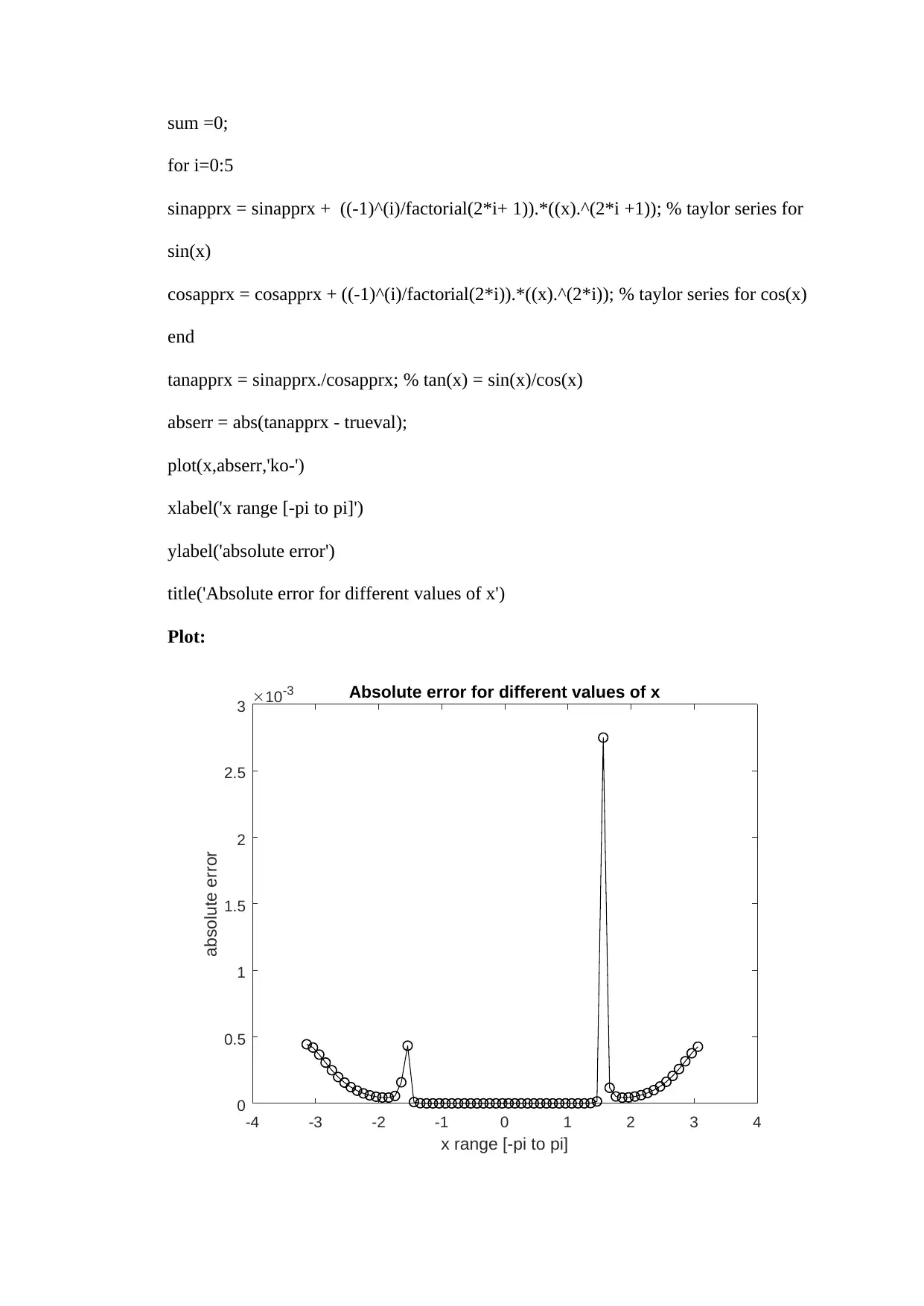
This article discusses three MATLAB functions for distance conversion, time conversion, and quadratic equation roots. It provides sample codes and outputs for each function. The distance conversion function converts miles and yards to kilometers. The time conversion function converts minutes to hours and minutes. The quadratic equation roots function finds the roots of a quadratic equation. The article also includes a discussion on the Taylor series of sin(x) and tan(x) and provides sample codes and outputs for each.
Contribute Materials
Your contribution can guide someone’s learning journey. Share your
documents today.

1 out of 11


Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
© 2024 | Zucol Services PVT LTD | All rights reserved.