Mechanical Engineering: System Dynamics I Report - Spring 2020
VerifiedAdded on 2022/08/18
|11
|1290
|18
Report
AI Summary
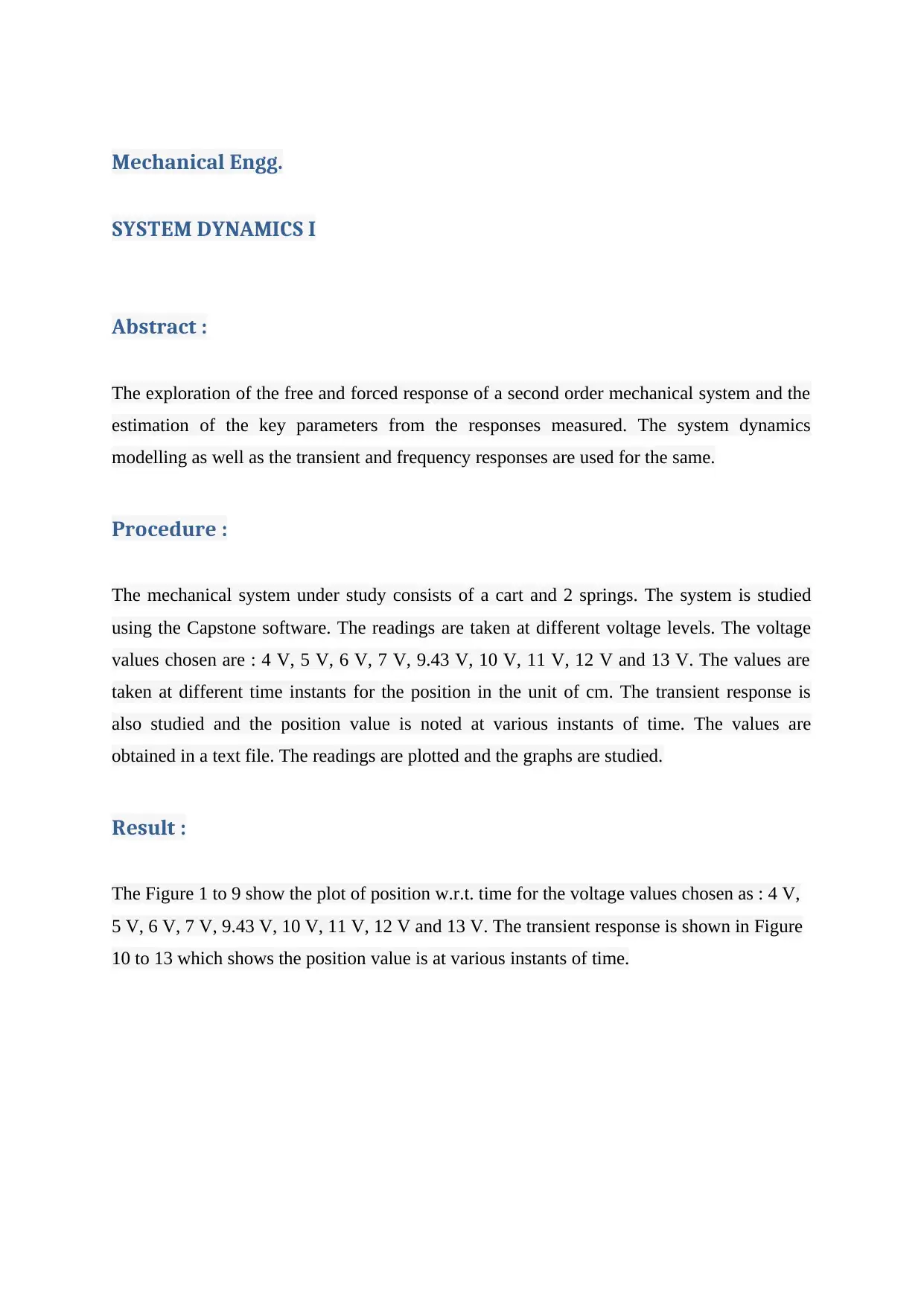
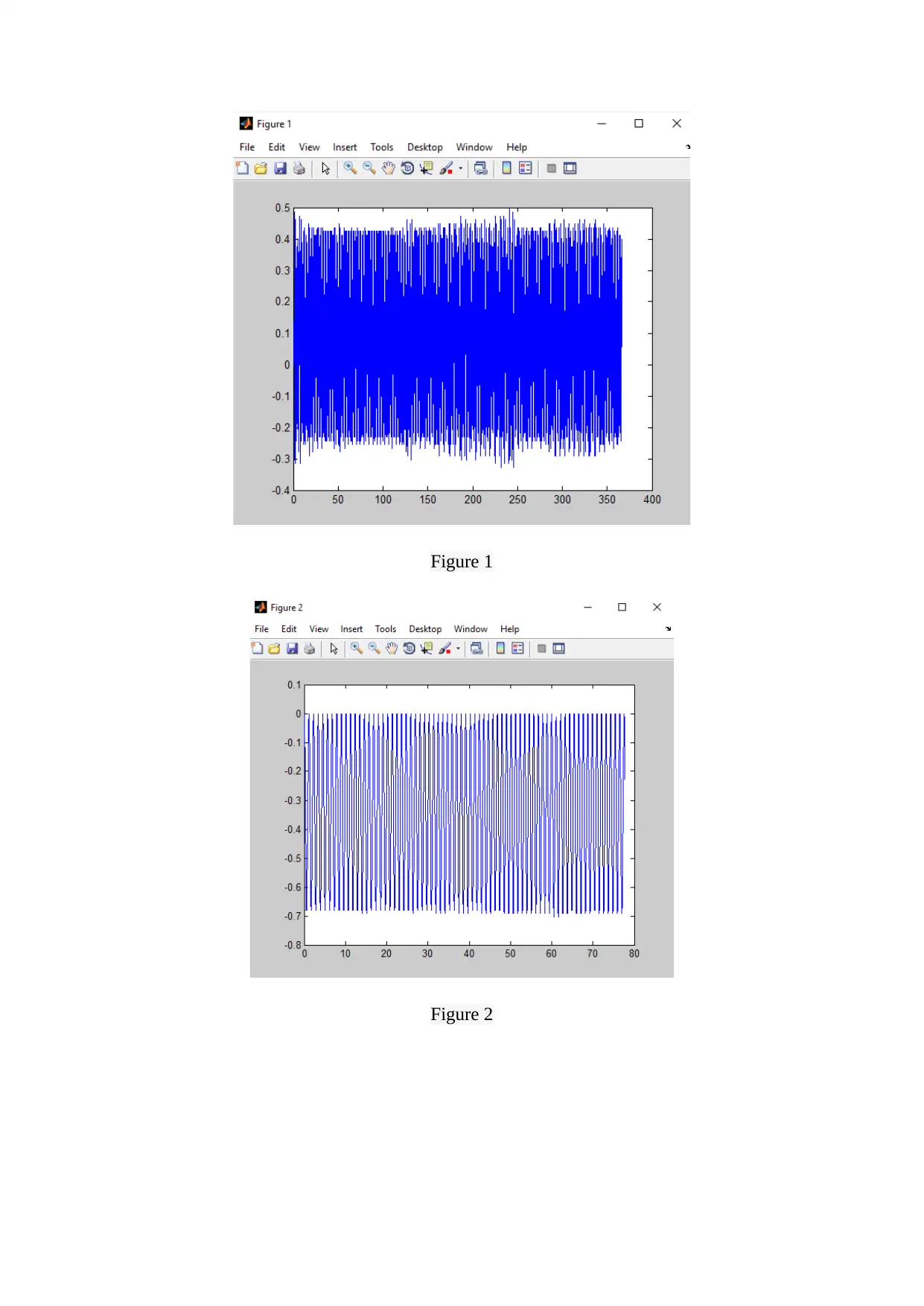
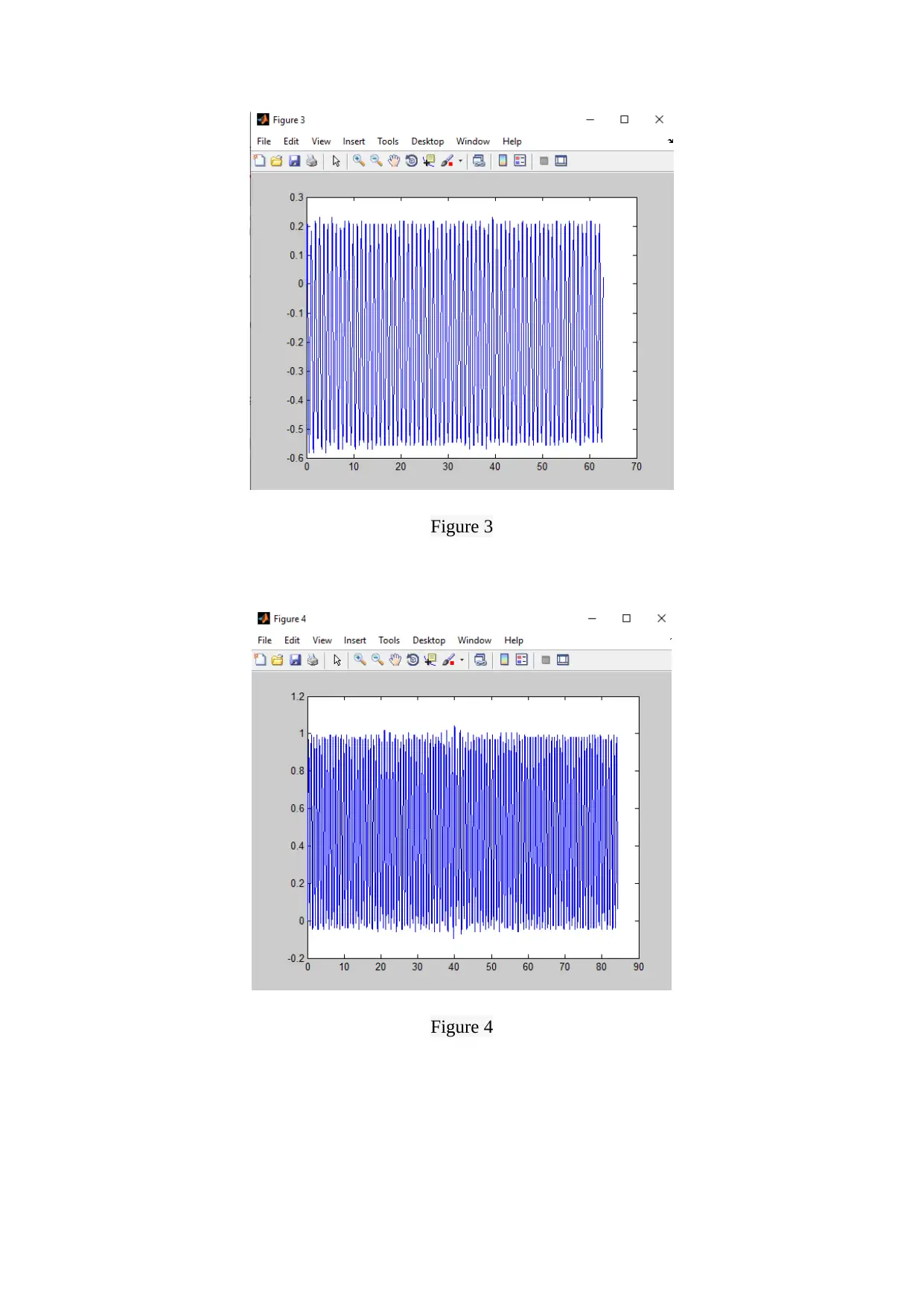
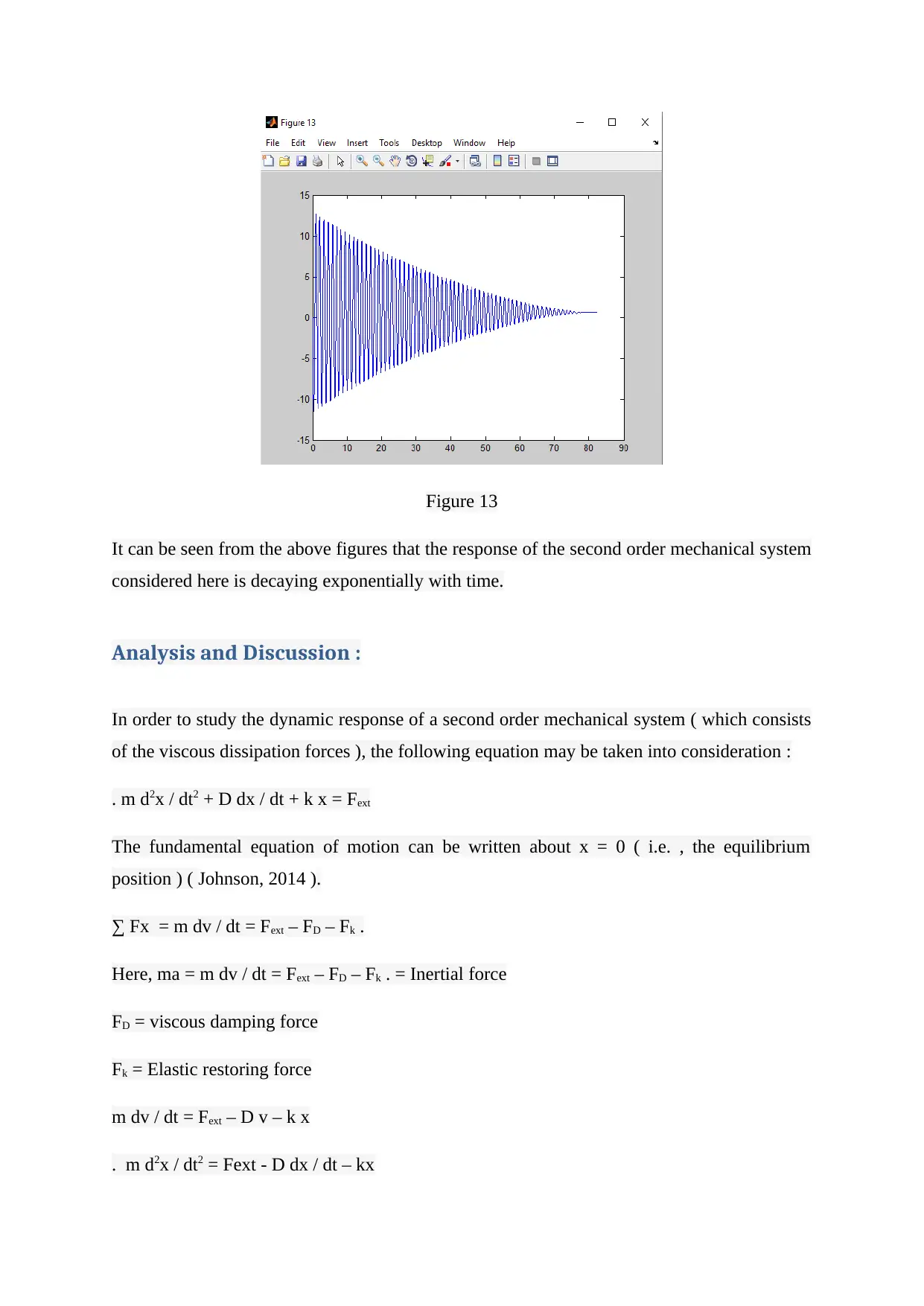
This report presents an analysis of a second-order mechanical system, focusing on its free and forced responses. The study utilizes a cart and two springs, and experiments are conducted using Capstone software at various voltage levels. Readings of position versus time are taken and plotted to analyze the system's behavior, including its transient response. The report examines the governing equation of motion, considering inertial, viscous damping, and elastic restoring forces. It explores the free response, considering different damping scenarios (underdamped, critically damped, and overdamped), and derives the relevant equations. Furthermore, the report investigates the forced response of the system. The results show the system's response decaying exponentially with time. The analysis includes references to relevant literature on system dynamics and mechanical systems.
1 out of 11
Related Documents





Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
© 2024 | Zucol Services PVT LTD | All rights reserved.