Multirate Signal Processing Assignment: Problem Solutions
VerifiedAdded on 2023/06/12
|7
|1005
|380
Homework Assignment
AI Summary
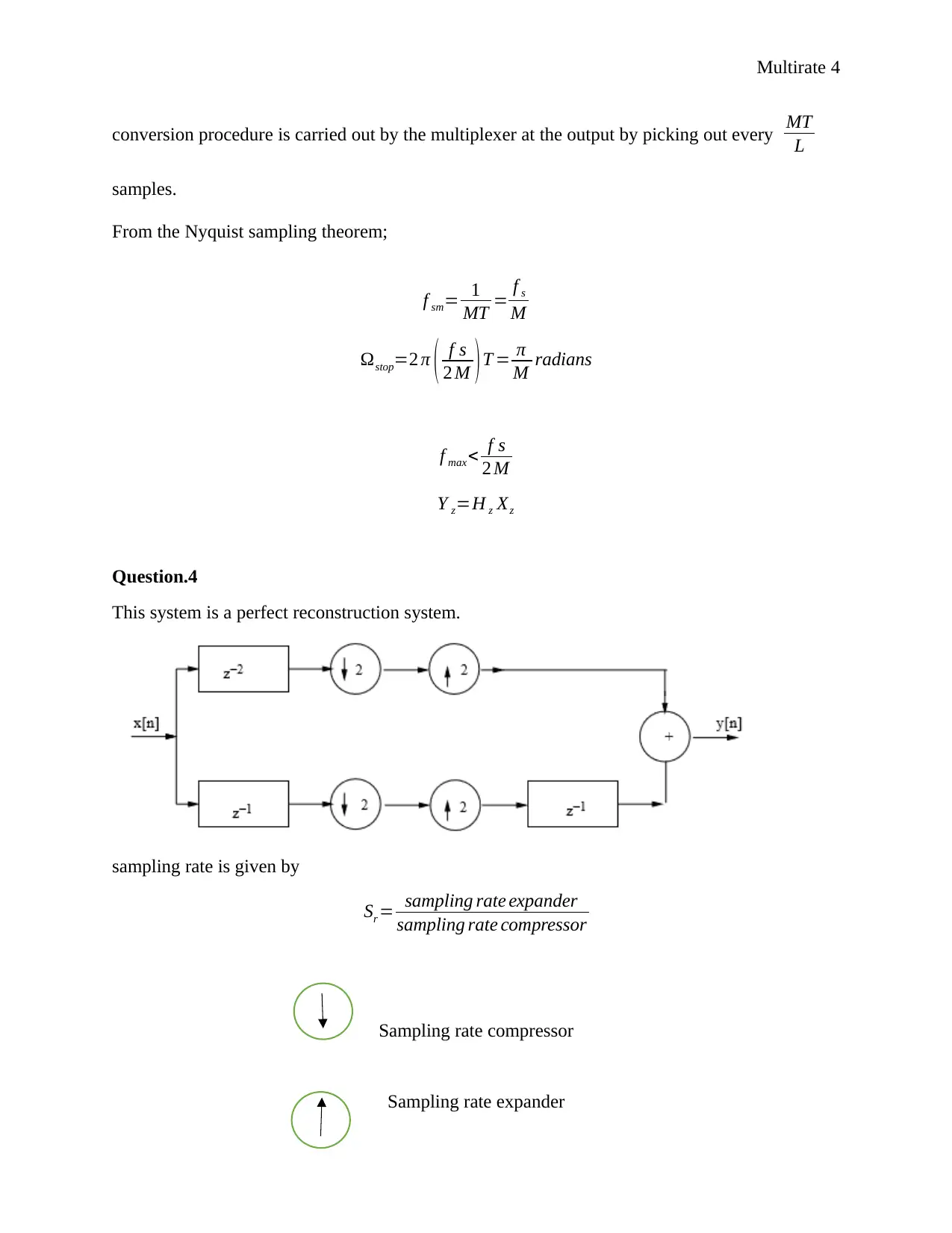
This document presents a solved assignment on multirate signal processing, addressing several key problems. The first question utilizes the noble identity to demonstrate an efficient implementation of a down-sampling process involving a filter. The second question involves drawing the discrete-time Fourier transforms of signals after down-sampling and interpolation. The third question discusses interpolation, cutoff frequency, and the Nyquist sampling theorem. The fourth question examines a perfect reconstruction system, analyzing sampling rates and transfer functions. Finally, the fifth question focuses on determining the transfer function of a system comprising expanders and compressors. The solutions provide detailed steps and explanations, supported by references to relevant academic sources.





1 out of 7
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2025 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.