Non-Linear Programming for Design Optimization of Step-Cone Pulley
VerifiedAdded on 2023/06/12
|8
|1855
|101
Project
AI Summary
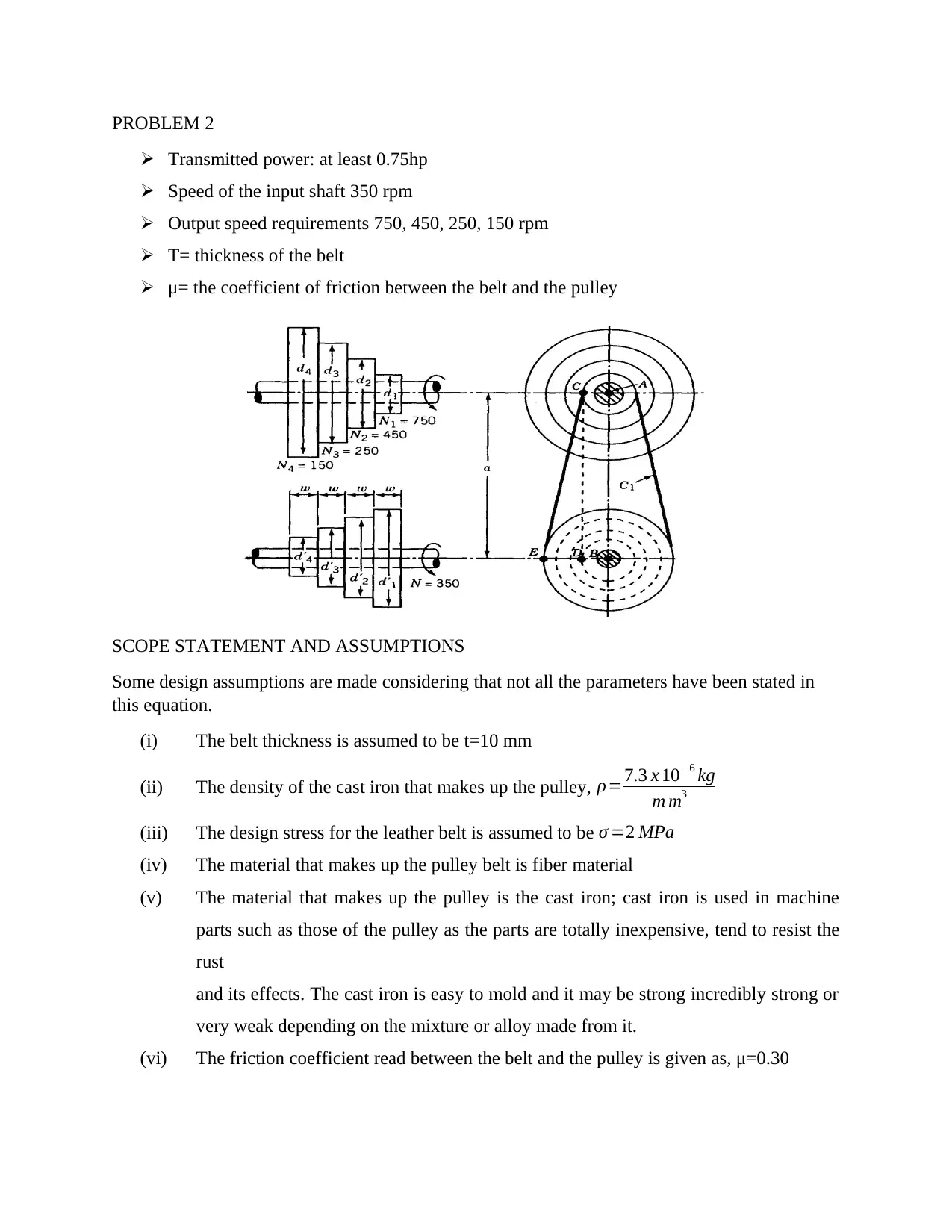
This project focuses on the design optimization of a step-cone pulley for transmitting a power of at least 0.75 hp, with an input shaft speed of 350 rpm and output speed requirements of 750, 450, 250, and 150 rpm. The problem is formulated to minimize the weight of the pulley by determining optimal widths and diameters of the steps, considering constraints such as tension ratios, belt length, and material properties. The mathematical model includes an objective function representing the mass of the pulley and several inequality and equality constraints derived from the design requirements and physical limitations. The optimization problem is solved using MATLAB, and the results are discussed, highlighting the impact of design variables on the pulley's weight. The final design ensures that the material of the belt is leather fiber with a maximum allowable stress of σ = 2 N/mm², satisfying all design constraints and achieving minimum weight.





1 out of 8



Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.