Designing an Obstacle Avoidance Robotic Vehicle: Research Report
VerifiedAdded on 2021/06/17
|12
|2581
|311
Report
AI Summary
This research paper focuses on designing an obstacle avoidance robotic vehicle, a key area in mechanical engineering. The paper outlines the design process, emphasizing the use of hardware components such as ultrasonic sensors, motor drivers, microcontrollers, and compilers. It explores the functionality of obstacle avoidance robots, which are used in various applications, from industrial settings to domestic tasks. The paper investigates two different designs, analyzing their components, advantages, and disadvantages. The first design utilizes a single ultrasonic sensor, while the second employs multiple IR sensors. The research compares these designs, evaluating their hardware and software requirements. The report concludes with a discussion on the future developments and potential improvements of these designs, highlighting the importance of robotics in various fields.

Obstacle Avoidance Robotics 1
DESIGNING AN OBSTACLE AVOIDANCE ROBOTIC VEHICLE
A Research Paper on Robotics By
Student’s Name
Name of the Professor
Institutional Affiliation
City/State
Year/Month/Day
04 May 2018 1
DESIGNING AN OBSTACLE AVOIDANCE ROBOTIC VEHICLE
A Research Paper on Robotics By
Student’s Name
Name of the Professor
Institutional Affiliation
City/State
Year/Month/Day
04 May 2018 1
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser

Obstacle Avoidance Robotics 2
Abstract
The obstacle avoidance robotics is used in the detection of obstacles on the path followed by the
vehicle and then avoiding the collision. The major aim and objective of this research paper are to
determine a way through which an obstacle robotic vehicle can be designed by the use of
hardware specifications such as an ultrasonic sensor, motor drive, microcontroller, and compiler.
Robots can be defined as system packages such as automation technology, electrical, and
mechanical which can be applied so as to perform numerous tasks for industrial and domestic
use. The obstacle avoidance robots are currently being used in dangerous areas where the
penetration of human can be dangerous, used in household work such as automatic vacuum
cleaning than can clean the room automatically and also applied in almost all mobile robot
navigation system.
04 May 2018 2
Abstract
The obstacle avoidance robotics is used in the detection of obstacles on the path followed by the
vehicle and then avoiding the collision. The major aim and objective of this research paper are to
determine a way through which an obstacle robotic vehicle can be designed by the use of
hardware specifications such as an ultrasonic sensor, motor drive, microcontroller, and compiler.
Robots can be defined as system packages such as automation technology, electrical, and
mechanical which can be applied so as to perform numerous tasks for industrial and domestic
use. The obstacle avoidance robots are currently being used in dangerous areas where the
penetration of human can be dangerous, used in household work such as automatic vacuum
cleaning than can clean the room automatically and also applied in almost all mobile robot
navigation system.
04 May 2018 2
Obstacle Avoidance Robotics 3
INTRODUCTION
This research paper in the field of mechanical engineering is about how to design an
obstacle avoider robotic vehicle. The major aim and objective of this research paper are to
determine a way through which an obstacle robotic vehicle can be designed by the use of
hardware specifications such as an ultrasonic sensor, motor drive, microcontroller, and compiler.
Robots can be defined as system packages such as automation technology, electrical, and
mechanical which can be applied so as to perform numerous tasks for industrial and domestic
use. An obstacle avoider robotic vehicle is the robotic vehicle that utilizes ultra-sonic sensors for
its functionality.
The major reason for designing an obstacle avoider robotic vehicle is to make a vehicle
track and avoid an obstacle that may be in the path in which the vehicle is moving. The detection
of the object is made possible by ultrasonic sensors which are coupled with motors and the
microcontroller. Presently, the obstacle avoider robot vehicle is being applied in places of work
such as industries and domestic so as to replace human beings since they are characterized by
high performance and are more reliable (Brijmohan, 2012). Some of the characteristics of the
obstacle avoider robotic vehicle include intelligence, movement, energy, and intelligence.
Research Question
What are some of the ways of designing an obstacle avoidance robotic vehicle? This research
question is from the field of mechanical engineering and seeks to evaluate different methods in
which an obstacle avoidance robotic vehicle can be designed and then analyzing the designs to
come up with the optimum design of the robotic vehicle (Madani, 2014).
04 May 2018 3
INTRODUCTION
This research paper in the field of mechanical engineering is about how to design an
obstacle avoider robotic vehicle. The major aim and objective of this research paper are to
determine a way through which an obstacle robotic vehicle can be designed by the use of
hardware specifications such as an ultrasonic sensor, motor drive, microcontroller, and compiler.
Robots can be defined as system packages such as automation technology, electrical, and
mechanical which can be applied so as to perform numerous tasks for industrial and domestic
use. An obstacle avoider robotic vehicle is the robotic vehicle that utilizes ultra-sonic sensors for
its functionality.
The major reason for designing an obstacle avoider robotic vehicle is to make a vehicle
track and avoid an obstacle that may be in the path in which the vehicle is moving. The detection
of the object is made possible by ultrasonic sensors which are coupled with motors and the
microcontroller. Presently, the obstacle avoider robot vehicle is being applied in places of work
such as industries and domestic so as to replace human beings since they are characterized by
high performance and are more reliable (Brijmohan, 2012). Some of the characteristics of the
obstacle avoider robotic vehicle include intelligence, movement, energy, and intelligence.
Research Question
What are some of the ways of designing an obstacle avoidance robotic vehicle? This research
question is from the field of mechanical engineering and seeks to evaluate different methods in
which an obstacle avoidance robotic vehicle can be designed and then analyzing the designs to
come up with the optimum design of the robotic vehicle (Madani, 2014).
04 May 2018 3
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
Obstacle Avoidance Robotics 4
Literature Review
Robotics are increasingly gaining popularity in numerous fields in the past decade.
Although robotics have been used in many industries for more than 40 years, the most current
use of robots include the medical robots which are designed to support surgeons. The major
characteristic of the robotic vehicle is the ability to power itself by the use of internal power
source such as external sources such as through charging or using rechargeable batteries. The
vehicle should also have the ability to move from one position to another within the specified
space and this is made possible by the use of walking, rolling wheels, and propelling (Castelli,
2012).
Intelligence is also another important ability of the robotic vehicle for it to avoid an
obstacle. Intelligence in machines denoted smartness. This is made possible through
programming the robot with all the required instructions on how it will operate. The vehicle
should also have the capability to sense its surrounding through detecting an obstacle on the path,
some of the types of sensors that can be used by the vehicle to understand its surrounding include
the touch sensor, chemical sensor, light sensor, and sonar sensor. The sensor that is most
preferred for obstacle detection is the ultrasonic sensor because of its low cost and high ranging
capability (Graefe, 2009).
Some of the software and hardware specifications that are used in designing the obstacle
avoider robot vehicle include the microcontroller, power source, motor drivers, voltage regulator,
and DC motor. The microcontroller is made up of input /output peripherals, memory, and
processor core. Each of these components has specific role related to them that make the
microcontroller be known as a computer in a chip. The DC motor is a mechanical device that is
propelled by the direct current (DC) electrical power (Hutte, 2017). The voltage regulator is
04 May 2018 4
Literature Review
Robotics are increasingly gaining popularity in numerous fields in the past decade.
Although robotics have been used in many industries for more than 40 years, the most current
use of robots include the medical robots which are designed to support surgeons. The major
characteristic of the robotic vehicle is the ability to power itself by the use of internal power
source such as external sources such as through charging or using rechargeable batteries. The
vehicle should also have the ability to move from one position to another within the specified
space and this is made possible by the use of walking, rolling wheels, and propelling (Castelli,
2012).
Intelligence is also another important ability of the robotic vehicle for it to avoid an
obstacle. Intelligence in machines denoted smartness. This is made possible through
programming the robot with all the required instructions on how it will operate. The vehicle
should also have the capability to sense its surrounding through detecting an obstacle on the path,
some of the types of sensors that can be used by the vehicle to understand its surrounding include
the touch sensor, chemical sensor, light sensor, and sonar sensor. The sensor that is most
preferred for obstacle detection is the ultrasonic sensor because of its low cost and high ranging
capability (Graefe, 2009).
Some of the software and hardware specifications that are used in designing the obstacle
avoider robot vehicle include the microcontroller, power source, motor drivers, voltage regulator,
and DC motor. The microcontroller is made up of input /output peripherals, memory, and
processor core. Each of these components has specific role related to them that make the
microcontroller be known as a computer in a chip. The DC motor is a mechanical device that is
propelled by the direct current (DC) electrical power (Hutte, 2017). The voltage regulator is
04 May 2018 4
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
Obstacle Avoidance Robotics 5
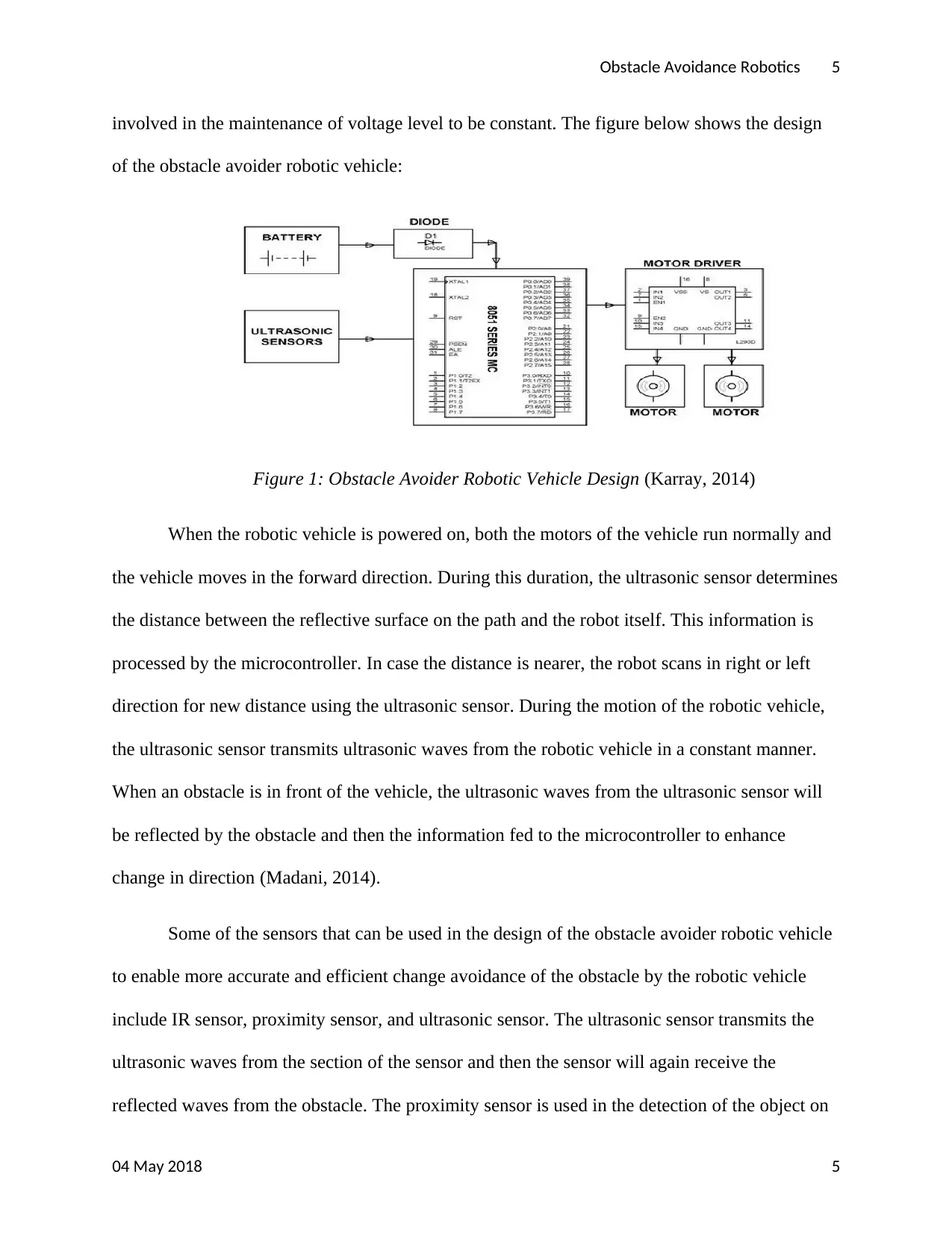
involved in the maintenance of voltage level to be constant. The figure below shows the design
of the obstacle avoider robotic vehicle:
Figure 1: Obstacle Avoider Robotic Vehicle Design (Karray, 2014)
When the robotic vehicle is powered on, both the motors of the vehicle run normally and
the vehicle moves in the forward direction. During this duration, the ultrasonic sensor determines
the distance between the reflective surface on the path and the robot itself. This information is
processed by the microcontroller. In case the distance is nearer, the robot scans in right or left
direction for new distance using the ultrasonic sensor. During the motion of the robotic vehicle,
the ultrasonic sensor transmits ultrasonic waves from the robotic vehicle in a constant manner.
When an obstacle is in front of the vehicle, the ultrasonic waves from the ultrasonic sensor will
be reflected by the obstacle and then the information fed to the microcontroller to enhance
change in direction (Madani, 2014).
Some of the sensors that can be used in the design of the obstacle avoider robotic vehicle
to enable more accurate and efficient change avoidance of the obstacle by the robotic vehicle
include IR sensor, proximity sensor, and ultrasonic sensor. The ultrasonic sensor transmits the
ultrasonic waves from the section of the sensor and then the sensor will again receive the
reflected waves from the obstacle. The proximity sensor is used in the detection of the object on
04 May 2018 5
involved in the maintenance of voltage level to be constant. The figure below shows the design
of the obstacle avoider robotic vehicle:
Figure 1: Obstacle Avoider Robotic Vehicle Design (Karray, 2014)
When the robotic vehicle is powered on, both the motors of the vehicle run normally and
the vehicle moves in the forward direction. During this duration, the ultrasonic sensor determines
the distance between the reflective surface on the path and the robot itself. This information is
processed by the microcontroller. In case the distance is nearer, the robot scans in right or left
direction for new distance using the ultrasonic sensor. During the motion of the robotic vehicle,
the ultrasonic sensor transmits ultrasonic waves from the robotic vehicle in a constant manner.
When an obstacle is in front of the vehicle, the ultrasonic waves from the ultrasonic sensor will
be reflected by the obstacle and then the information fed to the microcontroller to enhance
change in direction (Madani, 2014).
Some of the sensors that can be used in the design of the obstacle avoider robotic vehicle
to enable more accurate and efficient change avoidance of the obstacle by the robotic vehicle
include IR sensor, proximity sensor, and ultrasonic sensor. The ultrasonic sensor transmits the
ultrasonic waves from the section of the sensor and then the sensor will again receive the
reflected waves from the obstacle. The proximity sensor is used in the detection of the object on
04 May 2018 5
Obstacle Avoidance Robotics 6
the path being followed by the vehicle (Madani, 2014). The microcontroller will then be
responsible for the activation of the motor on the left-side so as to change the direction to the
left. The proximity sensor has the ability to activate the robot to turn 180o in case the obstacle is
not moved from the path of the robotic vehicle (Margolis, 2012).
The IR sensor is also used for the purposes of obstacle detection. The output of the signal
from the sensor is conveyed to the microcontroller which enables the vehicle to move in
backwards, forward, or even stops moving. The microcontroller can be programmed such that
after a given duration of stoppage, the sensor can the check in case the obstacle is still in the path
before proceeding with the motion if the path is clear (Rajasingh, 2010). Apart from the design
of obstacle avoider, robotic vehicle explained above, some researchers have come up with a
different kind of design which can automatically sense an obstacle on the path and then find a
way of overcoming the obstacle without knocking the object (Seng, 2009).
In the design of this robotic vehicle that has the capability of detecting the obstacle on the
way and then overtaking the obstacle, there is the use of sensor modules which detects the
obstacle. The sensor signal output is conveyed to the microcontroller which will enable the
robotic vehicle to either move backwards, forward or even stop motion. There are three different
types of IC s that are used in this design type namely IC L293, IC 7805, and IC 7404 (Trevelyan,
2009).
04 May 2018 6
the path being followed by the vehicle (Madani, 2014). The microcontroller will then be
responsible for the activation of the motor on the left-side so as to change the direction to the
left. The proximity sensor has the ability to activate the robot to turn 180o in case the obstacle is
not moved from the path of the robotic vehicle (Margolis, 2012).
The IR sensor is also used for the purposes of obstacle detection. The output of the signal
from the sensor is conveyed to the microcontroller which enables the vehicle to move in
backwards, forward, or even stops moving. The microcontroller can be programmed such that
after a given duration of stoppage, the sensor can the check in case the obstacle is still in the path
before proceeding with the motion if the path is clear (Rajasingh, 2010). Apart from the design
of obstacle avoider, robotic vehicle explained above, some researchers have come up with a
different kind of design which can automatically sense an obstacle on the path and then find a
way of overcoming the obstacle without knocking the object (Seng, 2009).
In the design of this robotic vehicle that has the capability of detecting the obstacle on the
way and then overtaking the obstacle, there is the use of sensor modules which detects the
obstacle. The sensor signal output is conveyed to the microcontroller which will enable the
robotic vehicle to either move backwards, forward or even stop motion. There are three different
types of IC s that are used in this design type namely IC L293, IC 7805, and IC 7404 (Trevelyan,
2009).
04 May 2018 6
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
Obstacle Avoidance Robotics 7
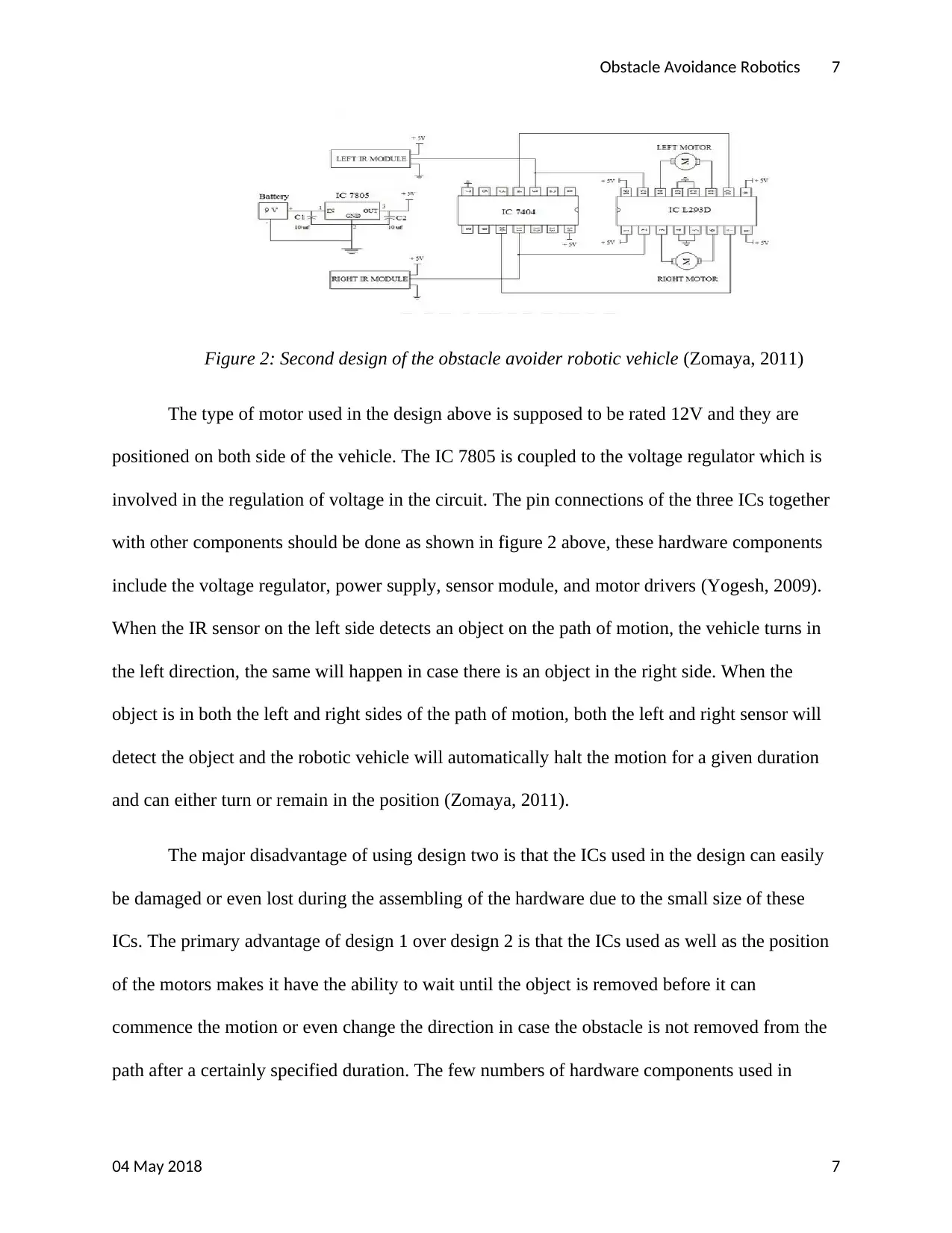
Figure 2: Second design of the obstacle avoider robotic vehicle (Zomaya, 2011)
The type of motor used in the design above is supposed to be rated 12V and they are
positioned on both side of the vehicle. The IC 7805 is coupled to the voltage regulator which is
involved in the regulation of voltage in the circuit. The pin connections of the three ICs together
with other components should be done as shown in figure 2 above, these hardware components
include the voltage regulator, power supply, sensor module, and motor drivers (Yogesh, 2009).
When the IR sensor on the left side detects an object on the path of motion, the vehicle turns in
the left direction, the same will happen in case there is an object in the right side. When the
object is in both the left and right sides of the path of motion, both the left and right sensor will
detect the object and the robotic vehicle will automatically halt the motion for a given duration
and can either turn or remain in the position (Zomaya, 2011).
The major disadvantage of using design two is that the ICs used in the design can easily
be damaged or even lost during the assembling of the hardware due to the small size of these
ICs. The primary advantage of design 1 over design 2 is that the ICs used as well as the position
of the motors makes it have the ability to wait until the object is removed before it can
commence the motion or even change the direction in case the obstacle is not removed from the
path after a certainly specified duration. The few numbers of hardware components used in
04 May 2018 7
Figure 2: Second design of the obstacle avoider robotic vehicle (Zomaya, 2011)
The type of motor used in the design above is supposed to be rated 12V and they are
positioned on both side of the vehicle. The IC 7805 is coupled to the voltage regulator which is
involved in the regulation of voltage in the circuit. The pin connections of the three ICs together
with other components should be done as shown in figure 2 above, these hardware components
include the voltage regulator, power supply, sensor module, and motor drivers (Yogesh, 2009).
When the IR sensor on the left side detects an object on the path of motion, the vehicle turns in
the left direction, the same will happen in case there is an object in the right side. When the
object is in both the left and right sides of the path of motion, both the left and right sensor will
detect the object and the robotic vehicle will automatically halt the motion for a given duration
and can either turn or remain in the position (Zomaya, 2011).
The major disadvantage of using design two is that the ICs used in the design can easily
be damaged or even lost during the assembling of the hardware due to the small size of these
ICs. The primary advantage of design 1 over design 2 is that the ICs used as well as the position
of the motors makes it have the ability to wait until the object is removed before it can
commence the motion or even change the direction in case the obstacle is not removed from the
path after a certainly specified duration. The few numbers of hardware components used in
04 May 2018 7
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
Obstacle Avoidance Robotics 8
design 1 make it more advantageous than design 2 since it is easier and less complicated to
implement during the process of designing (Siegwart, 2011).
The research gaps in the two designs of the obstacle avoider robotic vehicle are that the
researchers failed to explain how the two designs above can be implemented to function like the
voice-controlled robotic vehicles which are currently being used in the medical field to perform
medical surgeries. The two designs can be improved by incorporating other types of sensors so
that the robotic vehicle does not only detect the presence of obstacles, but also water, light, and
extreme temperatures (Graefe, 2009).
Evaluation
Robotics vehicles are currently being used in industries as a result of their reliability and
high performance compared to the humans. A robot is normally a combination of physical
components such as motors and computational intelligence which involves programmed
instructions and can perform a work with guidance or automatically (Madani, 2014). An obstacle
avoider robotic vehicle is used in the detection of obstacles and preventing the collision. The
detection of the obstacle is the basic requirement for this robotic vehicle. The robot acquires
information from the area surrounding through the sensors mounted on the robot (Brijmohan,
2012).
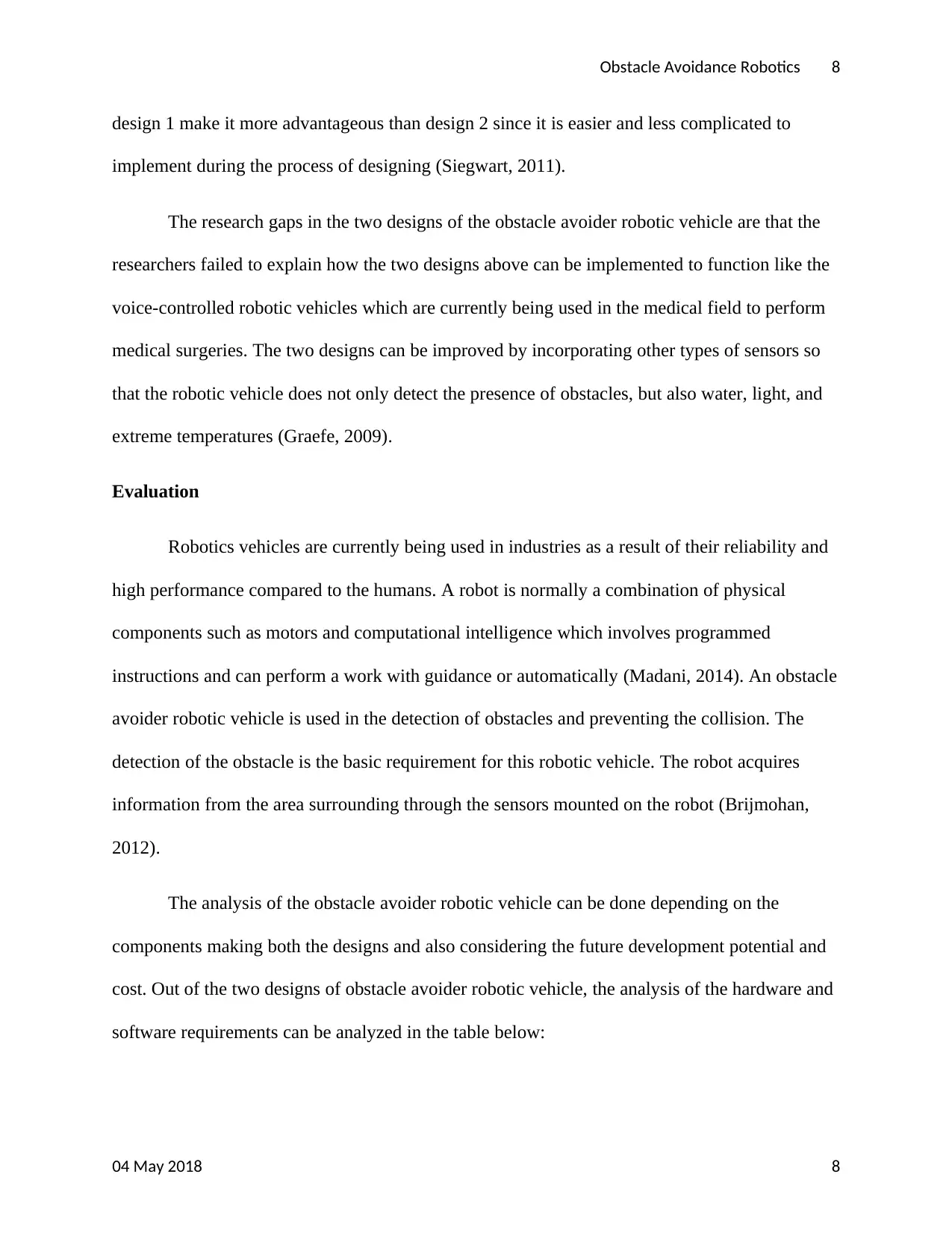
The analysis of the obstacle avoider robotic vehicle can be done depending on the
components making both the designs and also considering the future development potential and
cost. Out of the two designs of obstacle avoider robotic vehicle, the analysis of the hardware and
software requirements can be analyzed in the table below:
04 May 2018 8
design 1 make it more advantageous than design 2 since it is easier and less complicated to
implement during the process of designing (Siegwart, 2011).
The research gaps in the two designs of the obstacle avoider robotic vehicle are that the
researchers failed to explain how the two designs above can be implemented to function like the
voice-controlled robotic vehicles which are currently being used in the medical field to perform
medical surgeries. The two designs can be improved by incorporating other types of sensors so
that the robotic vehicle does not only detect the presence of obstacles, but also water, light, and
extreme temperatures (Graefe, 2009).
Evaluation
Robotics vehicles are currently being used in industries as a result of their reliability and
high performance compared to the humans. A robot is normally a combination of physical
components such as motors and computational intelligence which involves programmed
instructions and can perform a work with guidance or automatically (Madani, 2014). An obstacle
avoider robotic vehicle is used in the detection of obstacles and preventing the collision. The
detection of the obstacle is the basic requirement for this robotic vehicle. The robot acquires
information from the area surrounding through the sensors mounted on the robot (Brijmohan,
2012).
The analysis of the obstacle avoider robotic vehicle can be done depending on the
components making both the designs and also considering the future development potential and
cost. Out of the two designs of obstacle avoider robotic vehicle, the analysis of the hardware and
software requirements can be analyzed in the table below:
04 May 2018 8
Obstacle Avoidance Robotics 9
Design 1 Design 2
Voltage regulator present Voltage regulator present
Use 8051 microcontroller Use IC L293D and 7404
A single sensor module 2 IR sensor modules
3 ICs 5 ICs
From the analysis above, it is clear that the best design for an obstacle avoidance robotic vehicle
is design 1 due to its low cost of components and ease of implementation. Design 2 requires
more ICs and sensor modules which adds to its cost despite being more effective than design 1.
The obstacle avoidance robots are currently being applied in dangerous areas where the
penetration of human can be dangerous, used in household work such as automatic vacuum
cleaning than can clean the room automatically and also applied in almost all mobile robot
navigation system (Siegwart, 2011)
Majority of the components used in the development of the designs are expected to
change in future drastically as a result of development in technology. The future microcontrollers
are expected to be reduced size an ability to control numerous devices and processes. The power
consumption, processing power, and speed of the ICs are expected to change in future making
the future robots to be more efficient and effective (Wilfong, 2012).
Conclusion
The enormous quantity of work has been carried out regarding the obstacle avoidance
robotic vehicle. In this paper, two methodologies have been reviewed and analyzed with their
demerits and merits under numerous functional and operational strategies. An obstacle avoidance
robots design requires the integration of sensors according to their functionality. The hardware
specifications that are required for the design of this robotic vehicle include an ultrasonic sensor,
motor drive, microcontroller, and compiler. Despite the present researchers in this field have
04 May 2018 9
Design 1 Design 2
Voltage regulator present Voltage regulator present
Use 8051 microcontroller Use IC L293D and 7404
A single sensor module 2 IR sensor modules
3 ICs 5 ICs
From the analysis above, it is clear that the best design for an obstacle avoidance robotic vehicle
is design 1 due to its low cost of components and ease of implementation. Design 2 requires
more ICs and sensor modules which adds to its cost despite being more effective than design 1.
The obstacle avoidance robots are currently being applied in dangerous areas where the
penetration of human can be dangerous, used in household work such as automatic vacuum
cleaning than can clean the room automatically and also applied in almost all mobile robot
navigation system (Siegwart, 2011)
Majority of the components used in the development of the designs are expected to
change in future drastically as a result of development in technology. The future microcontrollers
are expected to be reduced size an ability to control numerous devices and processes. The power
consumption, processing power, and speed of the ICs are expected to change in future making
the future robots to be more efficient and effective (Wilfong, 2012).
Conclusion
The enormous quantity of work has been carried out regarding the obstacle avoidance
robotic vehicle. In this paper, two methodologies have been reviewed and analyzed with their
demerits and merits under numerous functional and operational strategies. An obstacle avoidance
robots design requires the integration of sensors according to their functionality. The hardware
specifications that are required for the design of this robotic vehicle include an ultrasonic sensor,
motor drive, microcontroller, and compiler. Despite the present researchers in this field have
04 May 2018 9
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide

Obstacle Avoidance Robotics 10
made obstacle avoidance robots a ubiquitous phenomenon, it requires to acquire great focus in
relevant application areas such as tabletop screens, artificial nurses, wheelchairs, and home
appliances.
04 May 2018 10
made obstacle avoidance robots a ubiquitous phenomenon, it requires to acquire great focus in
relevant application areas such as tabletop screens, artificial nurses, wheelchairs, and home
appliances.
04 May 2018 10
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
Obstacle Avoidance Robotics 11
Bibliography
Brijmohan, S., 2012. Comparison of Three Obstacle Avoidance Methods for an Autonomous Guided
Vehicle. Perth: University of Cincinnati.
Castelli, P., 2012. Recent Advances in Robot Kinematics. New York: Springer Science & Business Media.
Graefe, V., 2009. Intelligent Robots and Systems. Colorado: Elsevier.
Hutte, M., 2017. Field and Service Robotics:. London: Springer.
Karray, F., 2014. Robot Intelligence Technology and Applications 2. New York: Springer Science &
Business Media.
Madani, K., 2014. Informatics in Control, Automation and Robotics. California: Springer.
Margolis, M., 2012. Make an Arduino-Controlled Robot. New York: O'Reilly Media, Inc.
Rajasingh, J., 2010. Lane Detection and Obstacle Avoidance in Mobile Robots. Perth: University of
Cincinnati.
Seng, H., 2009. Study of Sonar Sensors for Navigation and Obstacle Avoidance of an Underwater
Robotics Vehicle. London: IEEE.
Siegwart, R., 2011. Introduction to Autonomous Mobile Robots. California: MIT Press.
Trevelyan, J., 2009. Experimental Robotics VI. Michigan: Springer Science & Business Media.
Wilfong, G., 2012. Autonomous Robot Vehicles. Chicago: Springer Science & Business Media.
Yogesh, S., 2009. A Path Planning and Obstacle Avoidance Algorithm for an Autonomous Robotic
Vehicle. Colorado: the University of North Carolina at Charlotte.
Zomaya, A., 2011. Obstacle Avoidance in Multi-robot Systems. Melbourne: World Scientific.
04 May 2018 11
Bibliography
Brijmohan, S., 2012. Comparison of Three Obstacle Avoidance Methods for an Autonomous Guided
Vehicle. Perth: University of Cincinnati.
Castelli, P., 2012. Recent Advances in Robot Kinematics. New York: Springer Science & Business Media.
Graefe, V., 2009. Intelligent Robots and Systems. Colorado: Elsevier.
Hutte, M., 2017. Field and Service Robotics:. London: Springer.
Karray, F., 2014. Robot Intelligence Technology and Applications 2. New York: Springer Science &
Business Media.
Madani, K., 2014. Informatics in Control, Automation and Robotics. California: Springer.
Margolis, M., 2012. Make an Arduino-Controlled Robot. New York: O'Reilly Media, Inc.
Rajasingh, J., 2010. Lane Detection and Obstacle Avoidance in Mobile Robots. Perth: University of
Cincinnati.
Seng, H., 2009. Study of Sonar Sensors for Navigation and Obstacle Avoidance of an Underwater
Robotics Vehicle. London: IEEE.
Siegwart, R., 2011. Introduction to Autonomous Mobile Robots. California: MIT Press.
Trevelyan, J., 2009. Experimental Robotics VI. Michigan: Springer Science & Business Media.
Wilfong, G., 2012. Autonomous Robot Vehicles. Chicago: Springer Science & Business Media.
Yogesh, S., 2009. A Path Planning and Obstacle Avoidance Algorithm for an Autonomous Robotic
Vehicle. Colorado: the University of North Carolina at Charlotte.
Zomaya, A., 2011. Obstacle Avoidance in Multi-robot Systems. Melbourne: World Scientific.
04 May 2018 11

Obstacle Avoidance Robotics 12
04 May 2018 12
04 May 2018 12
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
1 out of 12
Related Documents




Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.