Competency Demonstration Report: Bluetooth Robot Project Analysis
VerifiedAdded on 2020/04/21
|9
|1622
|339
Report
AI Summary
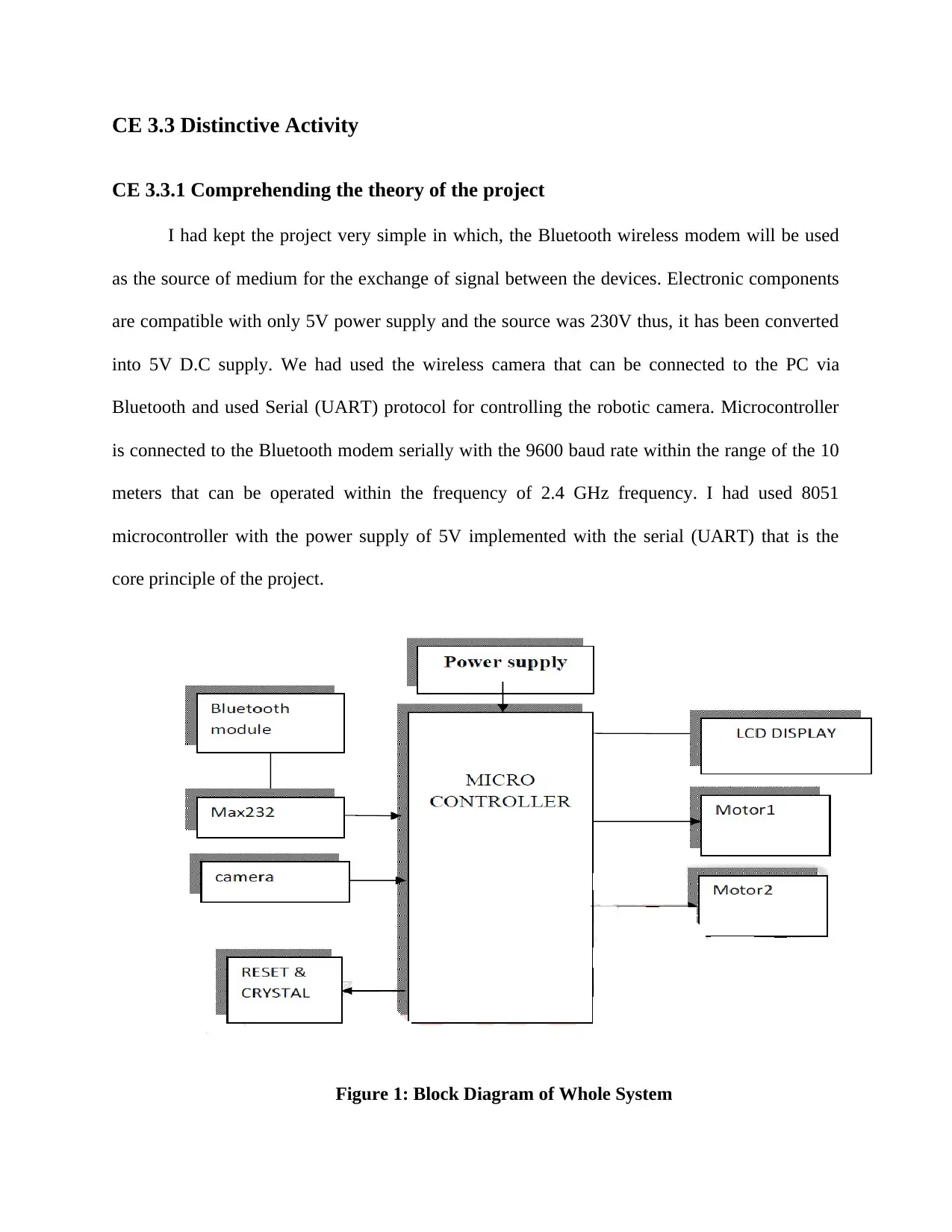
This report presents a competency demonstration for an electrical engineering project involving a Bluetooth-controlled robot equipped with a CMOS image sensor. The project aimed to develop a surveillance system that could be remotely controlled via Bluetooth, enhancing the monitoring experience. The student's role focused on signal transmission, specifically implementing a Bluetooth modem and limiting the operational range to 10 meters using UART communication protocol. The report details the project's background, objectives, the student's responsibilities, and the engineering knowledge applied, including the use of an 8051 microcontroller, wireless camera, and software tools like Proteus VSM. It also highlights the challenges faced, such as maintaining low voltage operations and ensuring reliable signal transmission, and the solutions implemented, including a rectifier and step-down transformer for power conversion. The collaborative nature of the project, involving teamwork and division of responsibilities, is also discussed. Overall, the report provides a comprehensive overview of the project's development, the student's contributions, and the successful implementation of a Bluetooth-controlled surveillance system.
1 out of 9
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2025 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.