Problem solving – Part A
VerifiedAdded on 2023/04/21
|13
|2726
|151
AI Summary
This document discusses problem solving in robotics and automation using Matlab. It covers the description of the problem, description of the robot, algorithm of creating robot, and Mat Lab code. The document also includes a table of contents and references.
Contribute Materials
Your contribution can guide someone’s learning journey. Share your
documents today.
Problem solving – Part A
1
1
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.
Table of Contents
1. Introduction...................................................................................................................................2
2. Description of the Problem............................................................................................................3
3. Description of the Robot................................................................................................................3
4. Algorithm of Creating Robot.........................................................................................................3
5. Mat Lab Code................................................................................................................................4
6. Conclusion...................................................................................................................................12
References...........................................................................................................................................12
2
1. Introduction...................................................................................................................................2
2. Description of the Problem............................................................................................................3
3. Description of the Robot................................................................................................................3
4. Algorithm of Creating Robot.........................................................................................................3
5. Mat Lab Code................................................................................................................................4
6. Conclusion...................................................................................................................................12
References...........................................................................................................................................12
2
1. Introduction
Robotics and automation can be done effectively through the software. Among the
software available, Matlab is a widely used software environment for research and teaching
applications. Matlab is a powerful linear algebra tool, with a very good collection of
toolboxes that extend Matlab basic functionality, and as it is an interactive open environment.
2. Description of the Problem
The problem is described as the robots to be placed in a hollow shape. The counts of 14
robots are chosen which has to be correctly placed in the hollow shape.
3. Description of the Robot
The project describes an arrangement of a robot swarm. The robots get same input, but a
desired configuration steers into wall friction. Along the surface of the walls the robots
experience infinite friction (KK and S, 2016). There is a rectangular workspace is created
from the code enclosed by four walls. Five steps iteration is performed that isolate one robot
from the swarm. “Drift-movements” are applied to the whole swarm. Only the isolated robot
experiences a different net movement as it touches a wall. Two regions are created in the
workspace:
a. Initialization of the robot in this zone – Staging Zone
b. Goal configuration of robot is in this zone – Build Zone
Colour disks are represented for robots. Black colour represents the boundary and grey colour
represents the final locations. A hollow shape is formed with a default arrangement of 14
robots. The code is run with no arguments. Arguments are defined as below: Pos Goal:
desired final position is represented of robots in a 2D matrix (grey). X axis position is given
in Column 1, y axis position is given in Column 2. PosObstacles: position of obstacles are
represented in a 2D matrix (black) given. Column 1- x axis position, Column 2- y axis
position PosCurrent: This describes the current location of all robots. Column 1 – x axis
position, Column 2- y axis position, Column 3 – index, Column 4 - color Make_Movie: A
small video called is saved in the current MATLAB directory. Returnvalue: total number of
movements applied to the swarm.
3
Robotics and automation can be done effectively through the software. Among the
software available, Matlab is a widely used software environment for research and teaching
applications. Matlab is a powerful linear algebra tool, with a very good collection of
toolboxes that extend Matlab basic functionality, and as it is an interactive open environment.
2. Description of the Problem
The problem is described as the robots to be placed in a hollow shape. The counts of 14
robots are chosen which has to be correctly placed in the hollow shape.
3. Description of the Robot
The project describes an arrangement of a robot swarm. The robots get same input, but a
desired configuration steers into wall friction. Along the surface of the walls the robots
experience infinite friction (KK and S, 2016). There is a rectangular workspace is created
from the code enclosed by four walls. Five steps iteration is performed that isolate one robot
from the swarm. “Drift-movements” are applied to the whole swarm. Only the isolated robot
experiences a different net movement as it touches a wall. Two regions are created in the
workspace:
a. Initialization of the robot in this zone – Staging Zone
b. Goal configuration of robot is in this zone – Build Zone
Colour disks are represented for robots. Black colour represents the boundary and grey colour
represents the final locations. A hollow shape is formed with a default arrangement of 14
robots. The code is run with no arguments. Arguments are defined as below: Pos Goal:
desired final position is represented of robots in a 2D matrix (grey). X axis position is given
in Column 1, y axis position is given in Column 2. PosObstacles: position of obstacles are
represented in a 2D matrix (black) given. Column 1- x axis position, Column 2- y axis
position PosCurrent: This describes the current location of all robots. Column 1 – x axis
position, Column 2- y axis position, Column 3 – index, Column 4 - color Make_Movie: A
small video called is saved in the current MATLAB directory. Returnvalue: total number of
movements applied to the swarm.
3
4. Algorithm of Creating Robot
The robots are arranged in such a way that they are numbered and the bottom-most robot is
‘1’. The arrangement is made in ascending order row-wise (Peymany, 2010). Corresponding
final locations on the robots are numbered based on descending order of y coordinate as first
priority and descending x coordinate as second priority. For each of the N robots the
algorithm is run once. At the beginning, robots 1 to K-1 are in their goal positions for Kth
step and robots K to N are in their initial positions. Steps 1 to 5 are implemented for the Kth
iteration:
Step 1: The robots are moved to the left and down until kth robot touches the bottom
boundary.
Step 2: Until the kth robot reaches left wall,apply a “drift-move” left.
Step 3: apply a “drift-move” up until Kth robot reaches its final y position.
Step 4: For Kth robot to be in correct position move all robots left relative to robots 1
to K-1. Then move all robots right until the Kth robot’s x position is at its goal
position.
Step 5: Until the Kth robot’s y position reaches its goal position move the robot up.
Final position is reached by robots 1 to K. And robots from K+1 to N have returned to
the staging zone.
5. Mat Lab Code
function totalMoves = robotsDiscrete(User_PosGoal,User_PosObstacles)
totalMoves=0;
close all; clc;
pauseTs = 0.01;
clc
format compact
global G
MOVIE_NAME = 'Friction_bots'; %to make a movie 'Friction_bots.mp4'
G.fig = figure(1);
clf
writerObj = VideoWriter(MOVIE_NAME,'MPEG-
4');%http://www.mathworks.com/help/matlab/ref/videowriterclass.html
set(writerObj,'Quality',100);
4
The robots are arranged in such a way that they are numbered and the bottom-most robot is
‘1’. The arrangement is made in ascending order row-wise (Peymany, 2010). Corresponding
final locations on the robots are numbered based on descending order of y coordinate as first
priority and descending x coordinate as second priority. For each of the N robots the
algorithm is run once. At the beginning, robots 1 to K-1 are in their goal positions for Kth
step and robots K to N are in their initial positions. Steps 1 to 5 are implemented for the Kth
iteration:
Step 1: The robots are moved to the left and down until kth robot touches the bottom
boundary.
Step 2: Until the kth robot reaches left wall,apply a “drift-move” left.
Step 3: apply a “drift-move” up until Kth robot reaches its final y position.
Step 4: For Kth robot to be in correct position move all robots left relative to robots 1
to K-1. Then move all robots right until the Kth robot’s x position is at its goal
position.
Step 5: Until the Kth robot’s y position reaches its goal position move the robot up.
Final position is reached by robots 1 to K. And robots from K+1 to N have returned to
the staging zone.
5. Mat Lab Code
function totalMoves = robotsDiscrete(User_PosGoal,User_PosObstacles)
totalMoves=0;
close all; clc;
pauseTs = 0.01;
clc
format compact
global G
MOVIE_NAME = 'Friction_bots'; %to make a movie 'Friction_bots.mp4'
G.fig = figure(1);
clf
writerObj = VideoWriter(MOVIE_NAME,'MPEG-
4');%http://www.mathworks.com/help/matlab/ref/videowriterclass.html
set(writerObj,'Quality',100);
4
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.
writerObj.FrameRate=30;
open(writerObj);
function makemymovie()% each frame has to be added. So a function is made and called
whenever an image needs to be added
figure(G.fig)
F = getframe;
writeVideo(writerObj,F.cdata);
% writeVideo(writerObj,F.cdata);
end
switch nargin
case 2
[PosGoal,G.PosObstacles,PosCurrent] =
SetupWorld(User_PosGoal,User_PosObstacles);
otherwise
[PosGoal,G.PosObstacles,PosCurrent] = SetupWorld();
end
G.EMPTY = 0;
G.OBST = 1;
G.maxX = size(G. PosObstacles,2);
G.maxY = size(G. PosObstacles,1);
%create vector of robots and draw them. A robot vector consists of an xy
%position, an index number, and a color.
numRobots = size(PosCurrent,1);
figure(1)
clf
G.colormap = [ 1,1,1; %Empty = white
0,0,0; %obstacle
0.5,0.5,0.5;
];
colormap(G.colormap(1:numel(unique(G. PosObstacles)),:));
G.axis=imagesc(G. PosObstacles);
set(gca,'box','off','xTick',[],'ytick',[],'ydir','normal','Visible','off');
axis equal
hold on
5
open(writerObj);
function makemymovie()% each frame has to be added. So a function is made and called
whenever an image needs to be added
figure(G.fig)
F = getframe;
writeVideo(writerObj,F.cdata);
% writeVideo(writerObj,F.cdata);
end
switch nargin
case 2
[PosGoal,G.PosObstacles,PosCurrent] =
SetupWorld(User_PosGoal,User_PosObstacles);
otherwise
[PosGoal,G.PosObstacles,PosCurrent] = SetupWorld();
end
G.EMPTY = 0;
G.OBST = 1;
G.maxX = size(G. PosObstacles,2);
G.maxY = size(G. PosObstacles,1);
%create vector of robots and draw them. A robot vector consists of an xy
%position, an index number, and a color.
numRobots = size(PosCurrent,1);
figure(1)
clf
G.colormap = [ 1,1,1; %Empty = white
0,0,0; %obstacle
0.5,0.5,0.5;
];
colormap(G.colormap(1:numel(unique(G. PosObstacles)),:));
G.axis=imagesc(G. PosObstacles);
set(gca,'box','off','xTick',[],'ytick',[],'ydir','normal','Visible','off');
axis equal
hold on
5
G.hRobots = zeros(1, numRobots);
colors = jet(numel(unique(PosCurrent(:,4)))+1);
for hi = 1: numRobots
G.hRobots(hi) = rectangle('Position',[PosCurrent(hi,1)-1/2,PosCurrent(hi,2)-
1/2,1,1],'Curvature',[1,1],'FaceColor',colors(PosCurrent(hi,4),:));
end
%%%%%%%automatic code
moveto('a');moveto('d'); %Null moves to ensure the first frame is drawn
count=1; %index of k'th robot
extramove=0;% used to execute the step 1 and 5 for robots placed in different heights.
Flag3=0 ;%Signals the completion of the algorithm
while Flag3~=1
for j=1:size(PosCurrent(1,:))
%step 1, move left and down
makemymovie()
moveto('a')
moveto('x')
moveto('x')
PosCurrent=sortrows(PosCurrent,3);
for i3=1:PosCurrent(count,2)-2 %additional down movement untill desired robot touches the
bottom boundary
moveto('x')
if PosCurrent(count,2)~=2
extramove=extramove+1; %counting the number of extra down movement
elseif PosCurrent(count,2)==2
break
end
end
%end of step 1
Flag1=0 ;%step 2, Left drift move
while Flag1~=1
moveto('w');
moveto('a');
moveto('x');
6
colors = jet(numel(unique(PosCurrent(:,4)))+1);
for hi = 1: numRobots
G.hRobots(hi) = rectangle('Position',[PosCurrent(hi,1)-1/2,PosCurrent(hi,2)-
1/2,1,1],'Curvature',[1,1],'FaceColor',colors(PosCurrent(hi,4),:));
end
%%%%%%%automatic code
moveto('a');moveto('d'); %Null moves to ensure the first frame is drawn
count=1; %index of k'th robot
extramove=0;% used to execute the step 1 and 5 for robots placed in different heights.
Flag3=0 ;%Signals the completion of the algorithm
while Flag3~=1
for j=1:size(PosCurrent(1,:))
%step 1, move left and down
makemymovie()
moveto('a')
moveto('x')
moveto('x')
PosCurrent=sortrows(PosCurrent,3);
for i3=1:PosCurrent(count,2)-2 %additional down movement untill desired robot touches the
bottom boundary
moveto('x')
if PosCurrent(count,2)~=2
extramove=extramove+1; %counting the number of extra down movement
elseif PosCurrent(count,2)==2
break
end
end
%end of step 1
Flag1=0 ;%step 2, Left drift move
while Flag1~=1
moveto('w');
moveto('a');
moveto('x');
6
moveto('d');
wq=PosCurrent(:,:);
wq=sortrows(wq,3); %has current position of robots
if wq(count,1)==3
Flag1=1;
end
end
% end of step 2 ,left drift move
% moving the robots a point up so that only k'th robot is allowed to drift move up.
moveto('w');
% moving the robots left to put k'th robot on left wall
moveto('a');
%step 3 starts. the up drift of k'th robot starts
Flag2=0;
while Flag2~=1
moveto('d');
moveto('w');
wq=PosCurrent(:,:);
wq=sortrows(wq,3);
if wq(count,2)== PosGoal(count,2)-extramove %checking if robot has reached required
relative position
Flag2=1;
continue
end
moveto('a');
moveto('x');
end
%updrift ends
%Step 4 :start of movement of all robots to relative x position wrt k'th robot
for ic=1:PosGoal(count,1)-3
moveto('a')
end
%moving to k'th robot's final position
for ic=1:PosGoal(count,1)-2
7
wq=PosCurrent(:,:);
wq=sortrows(wq,3); %has current position of robots
if wq(count,1)==3
Flag1=1;
end
end
% end of step 2 ,left drift move
% moving the robots a point up so that only k'th robot is allowed to drift move up.
moveto('w');
% moving the robots left to put k'th robot on left wall
moveto('a');
%step 3 starts. the up drift of k'th robot starts
Flag2=0;
while Flag2~=1
moveto('d');
moveto('w');
wq=PosCurrent(:,:);
wq=sortrows(wq,3);
if wq(count,2)== PosGoal(count,2)-extramove %checking if robot has reached required
relative position
Flag2=1;
continue
end
moveto('a');
moveto('x');
end
%updrift ends
%Step 4 :start of movement of all robots to relative x position wrt k'th robot
for ic=1:PosGoal(count,1)-3
moveto('a')
end
%moving to k'th robot's final position
for ic=1:PosGoal(count,1)-2
7
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
moveto('d')
end
end
b=size(PosGoal);
if count==b(1)
Flag3=1;
end
count=count+1;
moveto('a')
for ic2=1:extramove
moveto('w') % step 5:applying the correction motion of up movement by the same unit
of extra move that was done in step 1
extramove=0;
end
moveto('d')
for iin=1:20
makemymovie()
end
pause(pauseTs);
end
if Flag3==1
for im=1:20
makemymovie()
end
end
function retVal = frictionOK(stVal, step, G)
frictionBad = (stVal(2)==2 && step(2) <1 ) ... %friction if on bottom row and not trying
to move up
|| (stVal(1) == G.maxX-1 && step(1) >-1)...%friction if on right wall and not trying to
move left
||(stVal(2)==G.maxY-1 && step(2) >-1 )...%friction if on top wall and not trying to
move down
||(stVal(1)==2 && step(1) <1 ); %friction if on left wall and not trying to move right
retVal = ~frictionBad;
8
end
end
b=size(PosGoal);
if count==b(1)
Flag3=1;
end
count=count+1;
moveto('a')
for ic2=1:extramove
moveto('w') % step 5:applying the correction motion of up movement by the same unit
of extra move that was done in step 1
extramove=0;
end
moveto('d')
for iin=1:20
makemymovie()
end
pause(pauseTs);
end
if Flag3==1
for im=1:20
makemymovie()
end
end
function retVal = frictionOK(stVal, step, G)
frictionBad = (stVal(2)==2 && step(2) <1 ) ... %friction if on bottom row and not trying
to move up
|| (stVal(1) == G.maxX-1 && step(1) >-1)...%friction if on right wall and not trying to
move left
||(stVal(2)==G.maxY-1 && step(2) >-1 )...%friction if on top wall and not trying to
move down
||(stVal(1)==2 && step(1) <1 ); %friction if on left wall and not trying to move right
retVal = ~frictionBad;
8
end
function retVal = spaceFreeWithNoRobot(desVal, PosCurrent, G)
% move there if no robot in the way and space is free
retVal = ~ismember(desVal,PosCurrent(:,1:2),'rows') ...
&& desVal(1) >0 && desVal(1) <= G.maxX && desVal(2) >0 && desVal(2) <= G.maxY ...
%check that we are not hitting the boundary
&& G. PosObstacles( desVal(2),desVal(1) )~=1; %check we are not hitting the obstacle
end
function moveto(Direction)
totalMoves=totalMoves+1;
% Maps key to moving pixels
if strcmp(Direction,'a') %-x
PosCurrent = sortrows(PosCurrent,1);
step = -[1,0];
elseif strcmp(Direction,'d') %+x
PosCurrent = sortrows(PosCurrent,-1);
step = [1,0];
elseif strcmp(Direction,'w') %+y
PosCurrent = sortrows(PosCurrent,-2);
step = [0,1];
elseif strcmp(Direction,'x') %-y
PosCurrent = sortrows(PosCurrent,2);
step = -[0,1];
end
% implement the move on every robot
for ni = 1:size(PosCurrent,1)
stVal = PosCurrent(ni,1:2);
desVal = PosCurrent(ni,1:2)+step;
% move there if no robot in the way and space is free
if spaceFreeWithNoRobot(desVal, PosCurrent, G) && frictionOK(stVal, step, G)
PosCurrent(ni,1:2) = desVal;
end
%redraw the robot
if ~isequal( stVal, PosCurrent(ni,1:2) )
9
function retVal = spaceFreeWithNoRobot(desVal, PosCurrent, G)
% move there if no robot in the way and space is free
retVal = ~ismember(desVal,PosCurrent(:,1:2),'rows') ...
&& desVal(1) >0 && desVal(1) <= G.maxX && desVal(2) >0 && desVal(2) <= G.maxY ...
%check that we are not hitting the boundary
&& G. PosObstacles( desVal(2),desVal(1) )~=1; %check we are not hitting the obstacle
end
function moveto(Direction)
totalMoves=totalMoves+1;
% Maps key to moving pixels
if strcmp(Direction,'a') %-x
PosCurrent = sortrows(PosCurrent,1);
step = -[1,0];
elseif strcmp(Direction,'d') %+x
PosCurrent = sortrows(PosCurrent,-1);
step = [1,0];
elseif strcmp(Direction,'w') %+y
PosCurrent = sortrows(PosCurrent,-2);
step = [0,1];
elseif strcmp(Direction,'x') %-y
PosCurrent = sortrows(PosCurrent,2);
step = -[0,1];
end
% implement the move on every robot
for ni = 1:size(PosCurrent,1)
stVal = PosCurrent(ni,1:2);
desVal = PosCurrent(ni,1:2)+step;
% move there if no robot in the way and space is free
if spaceFreeWithNoRobot(desVal, PosCurrent, G) && frictionOK(stVal, step, G)
PosCurrent(ni,1:2) = desVal;
end
%redraw the robot
if ~isequal( stVal, PosCurrent(ni,1:2) )
9
set(G.hRobots(PosCurrent(ni,3)),'Position',[PosCurrent(ni,1)-1/2,PosCurrent(ni,2)-
1/2,1,1]);
end
end
PosCurrent= sortrows(PosCurrent,[2 1]);
m=PosCurrent(1,3);
if m==1
for movieti=1:3
makemymovie()
end
elseif m~=1
makemymovie()
end
end
function [Goalmap,map,PosCurrent] = SetupWorld(Goalmap,ObstacleExtra) %function that
has data set of the gameboard, initial points,final points and obstacles
map=[1 1 1 1 1 1 1 1 1 1 1 1 1 1 1;
1 0 0 0 0 0 0 0 0 0 0 0 0 0 1;
1 0 0 0 2 0 2 0 2 0 2 0 0 0 1;
1 0 0 0 2 0 2 0 2 2 2 0 0 0 1;
1 0 0 0 2 2 2 0 2 0 2 0 0 0 1;
1 0 0 0 0 0 0 0 0 0 0 0 0 0 1;
1 0 0 0 0 0 0 0 0 0 0 0 0 0 1;
1 0 0 0 0 0 0 0 0 0 0 0 0 0 1;
1 0 0 0 0 0 0 0 0 0 0 0 0 0 1;
1 0 0 0 0 0 0 0 0 0 0 0 0 0 1;
1 0 0 0 0 0 0 0 0 0 0 0 0 0 1;
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1;];
map = flipud(map); %has to be done to make the gameboard look like the matrix above
d=size(map);
switch nargin
case 2
q = size(Goalmap,1);
numrobots=q(1,1);
10
1/2,1,1]);
end
end
PosCurrent= sortrows(PosCurrent,[2 1]);
m=PosCurrent(1,3);
if m==1
for movieti=1:3
makemymovie()
end
elseif m~=1
makemymovie()
end
end
function [Goalmap,map,PosCurrent] = SetupWorld(Goalmap,ObstacleExtra) %function that
has data set of the gameboard, initial points,final points and obstacles
map=[1 1 1 1 1 1 1 1 1 1 1 1 1 1 1;
1 0 0 0 0 0 0 0 0 0 0 0 0 0 1;
1 0 0 0 2 0 2 0 2 0 2 0 0 0 1;
1 0 0 0 2 0 2 0 2 2 2 0 0 0 1;
1 0 0 0 2 2 2 0 2 0 2 0 0 0 1;
1 0 0 0 0 0 0 0 0 0 0 0 0 0 1;
1 0 0 0 0 0 0 0 0 0 0 0 0 0 1;
1 0 0 0 0 0 0 0 0 0 0 0 0 0 1;
1 0 0 0 0 0 0 0 0 0 0 0 0 0 1;
1 0 0 0 0 0 0 0 0 0 0 0 0 0 1;
1 0 0 0 0 0 0 0 0 0 0 0 0 0 1;
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1;];
map = flipud(map); %has to be done to make the gameboard look like the matrix above
d=size(map);
switch nargin
case 2
q = size(Goalmap,1);
numrobots=q(1,1);
10
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.
map(ObstacleExtra(:,1),ObstacleExtra(:,2))=1;
for i=1:d(1,1)
for i2=1:d(1,2)
if map(i,i2)==2
map(i,i2)=0;
end
end
end
for i=1:q
map(Goalmap(i,2),Goalmap(i,1))=2;
end
otherwise
numrobots =14;
count1=1;
for i=1:d(1,1)
for i2=1:d(1,2)
if map(i,i2)==2
Q1(count1,2)=i; %#ok<AGROW>
Q1(count1,1)=i2; %#ok<AGROW>
count1=count1+1;
end
end
end
Goalmap=sortrows(Q1,[-1 -2]);
end
pos = zeros(numrobots,2);
%place robots on defined location in the staging zone away from obstacles and not
overlapping
for i=1:numrobots
pos(i,:) = [5+i-4*floor((i-1)/4), floor((i-1)/4)+3];
end
PosCurrent = [pos,(1:numrobots)',(1:numrobots)'];
end
11
for i=1:d(1,1)
for i2=1:d(1,2)
if map(i,i2)==2
map(i,i2)=0;
end
end
end
for i=1:q
map(Goalmap(i,2),Goalmap(i,1))=2;
end
otherwise
numrobots =14;
count1=1;
for i=1:d(1,1)
for i2=1:d(1,2)
if map(i,i2)==2
Q1(count1,2)=i; %#ok<AGROW>
Q1(count1,1)=i2; %#ok<AGROW>
count1=count1+1;
end
end
end
Goalmap=sortrows(Q1,[-1 -2]);
end
pos = zeros(numrobots,2);
%place robots on defined location in the staging zone away from obstacles and not
overlapping
for i=1:numrobots
pos(i,:) = [5+i-4*floor((i-1)/4), floor((i-1)/4)+3];
end
PosCurrent = [pos,(1:numrobots)',(1:numrobots)'];
end
11
end
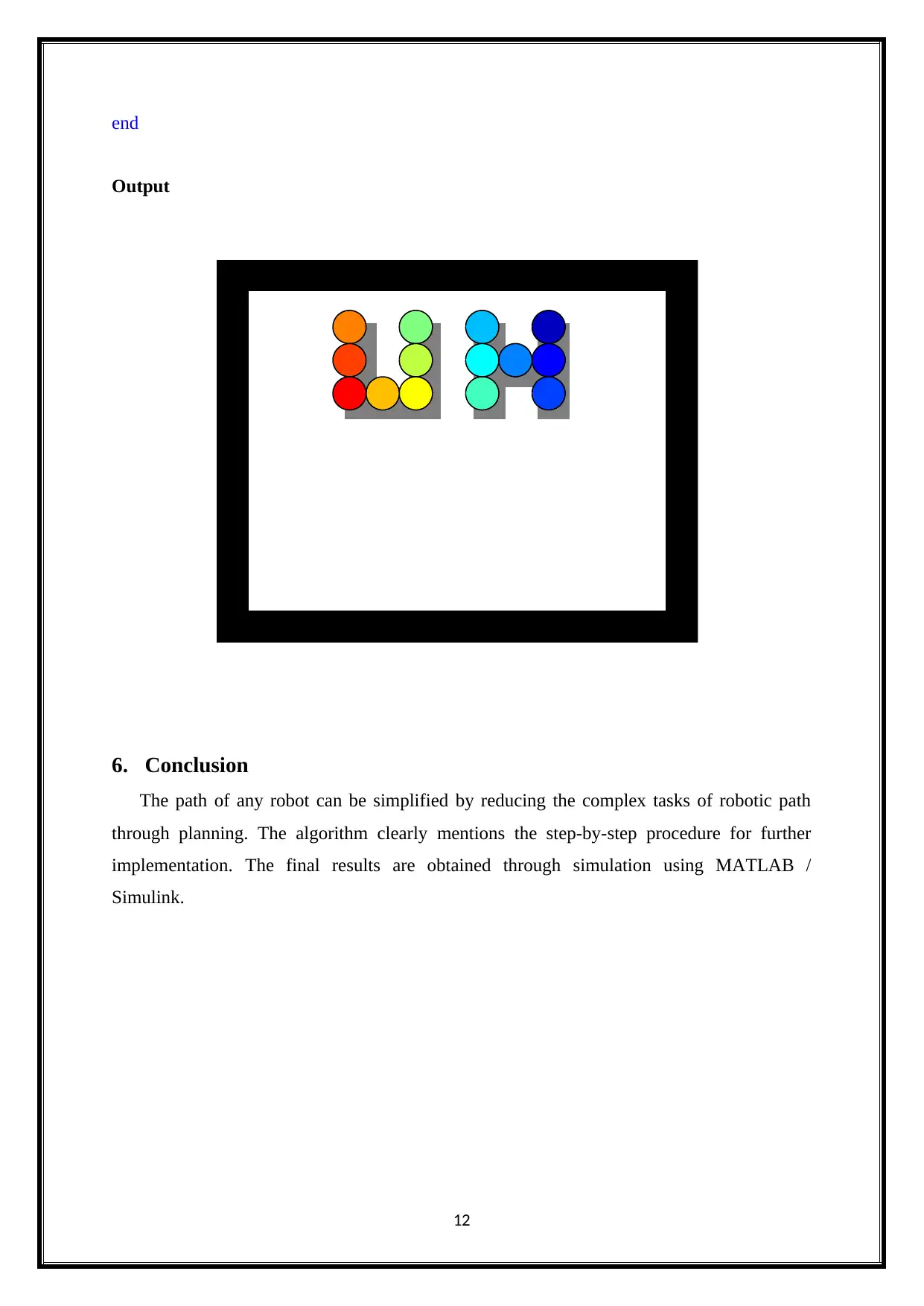
Output
6. Conclusion
The path of any robot can be simplified by reducing the complex tasks of robotic path
through planning. The algorithm clearly mentions the step-by-step procedure for further
implementation. The final results are obtained through simulation using MATLAB /
Simulink.
12
Output
6. Conclusion
The path of any robot can be simplified by reducing the complex tasks of robotic path
through planning. The algorithm clearly mentions the step-by-step procedure for further
implementation. The final results are obtained through simulation using MATLAB /
Simulink.
12

References
KK, V. and S, S. (2016). Industry Monitoring Robot using Arduino Uno with Matlab
Interface. Advances in Robotics & Automation, 05(02).
Peymany, M. (2010). Matlab Code for Brownian Motion Simulation (Brownian Motion,
Brownian Motion with Drift, Geometric Brownian Motion and Brownian Bridge). SSRN
Electronic Journal.
13
KK, V. and S, S. (2016). Industry Monitoring Robot using Arduino Uno with Matlab
Interface. Advances in Robotics & Automation, 05(02).
Peymany, M. (2010). Matlab Code for Brownian Motion Simulation (Brownian Motion,
Brownian Motion with Drift, Geometric Brownian Motion and Brownian Bridge). SSRN
Electronic Journal.
13
1 out of 13
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
© 2024 | Zucol Services PVT LTD | All rights reserved.