Analysis of Linear Dynamic Systems: Control Systems Homework
VerifiedAdded on 2023/01/23
|6
|1767
|52
Homework Assignment
AI Summary
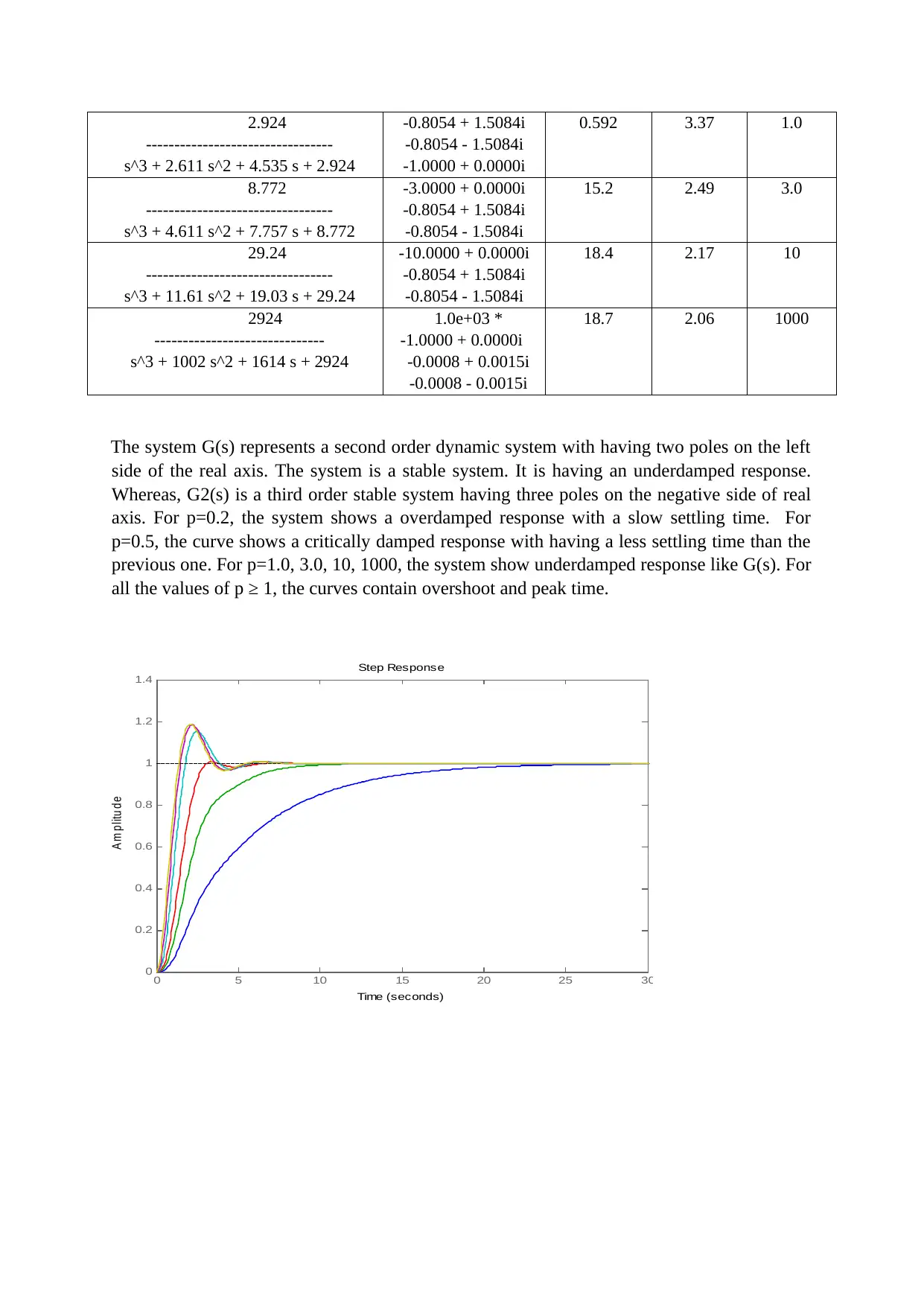
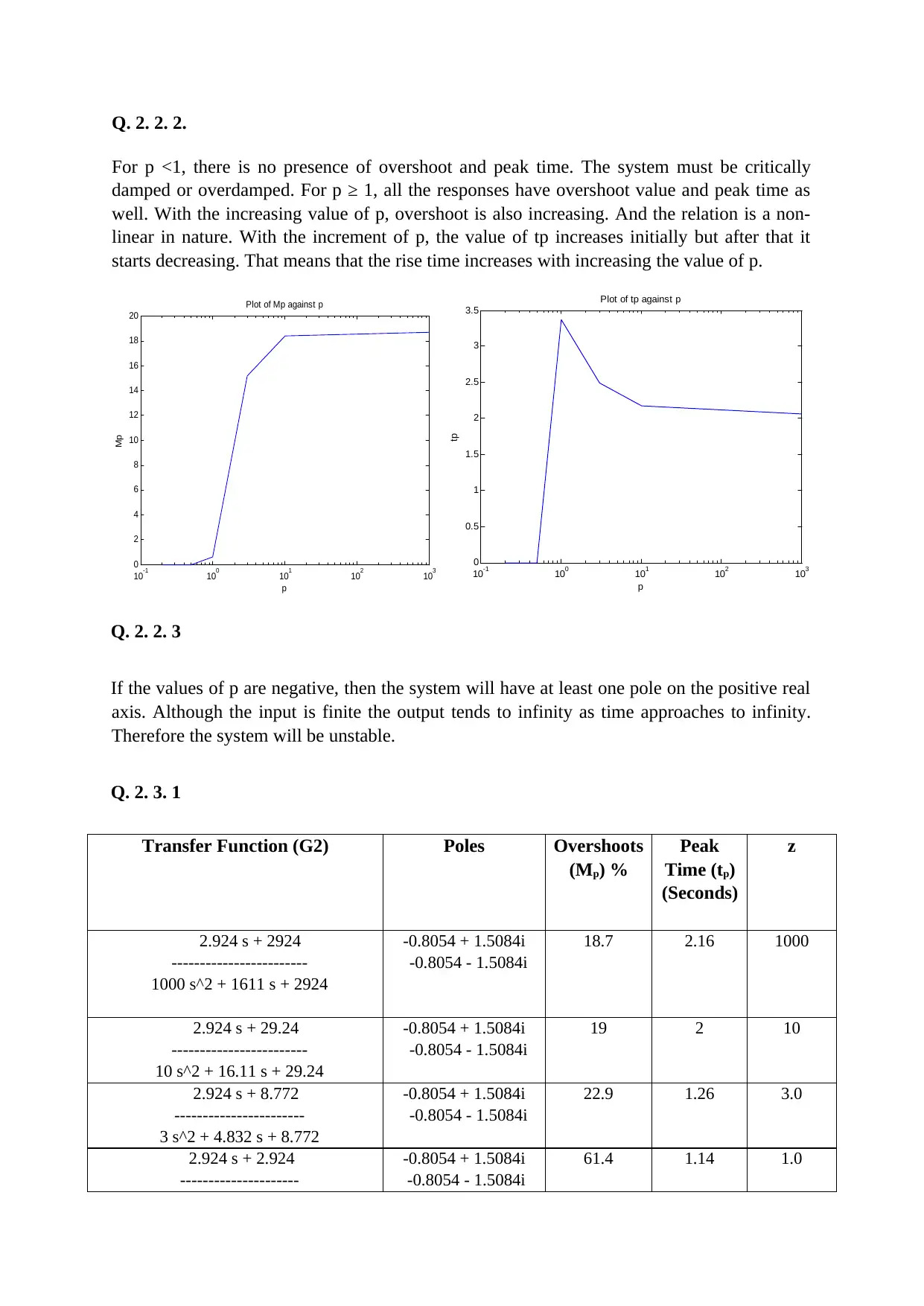
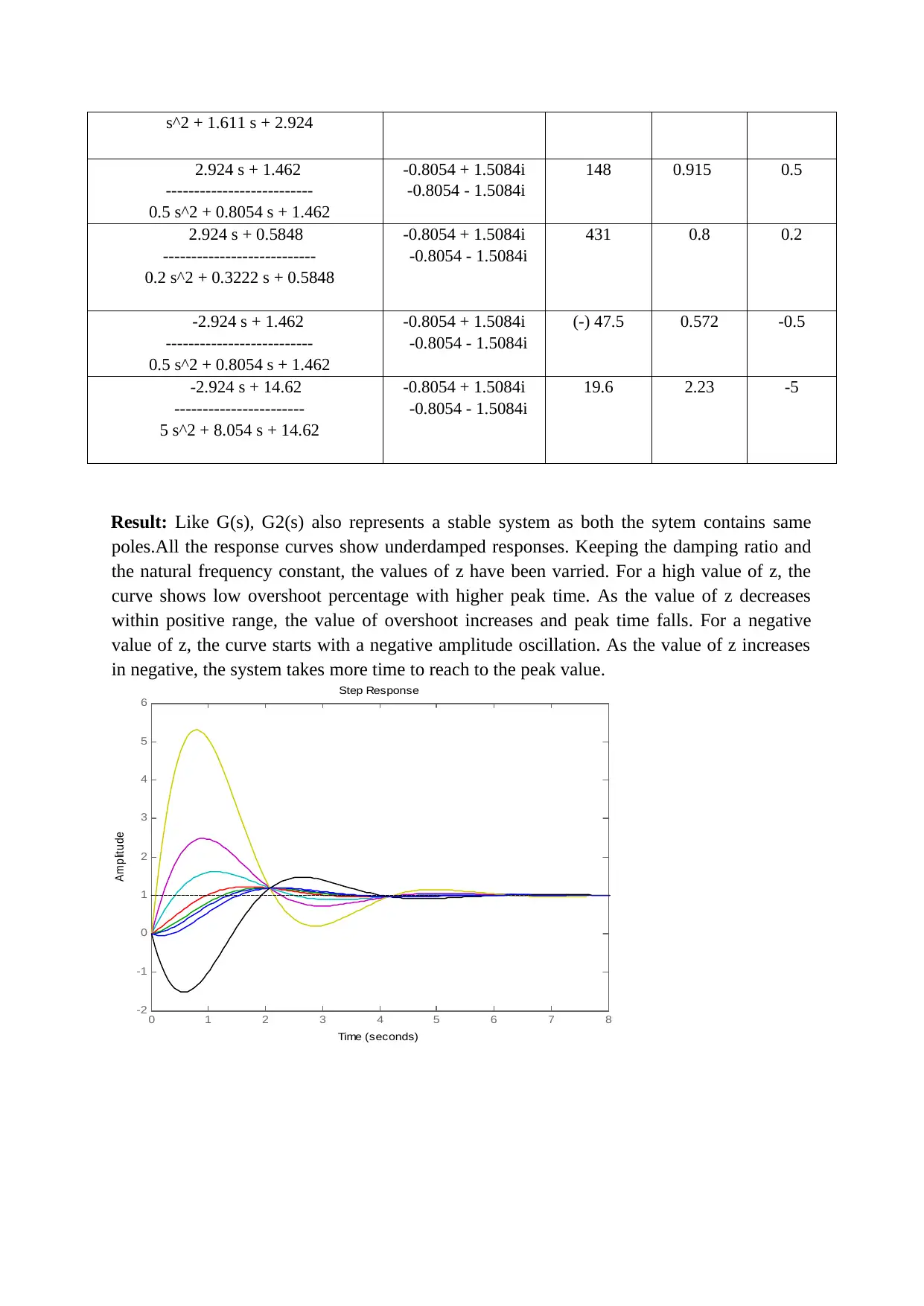
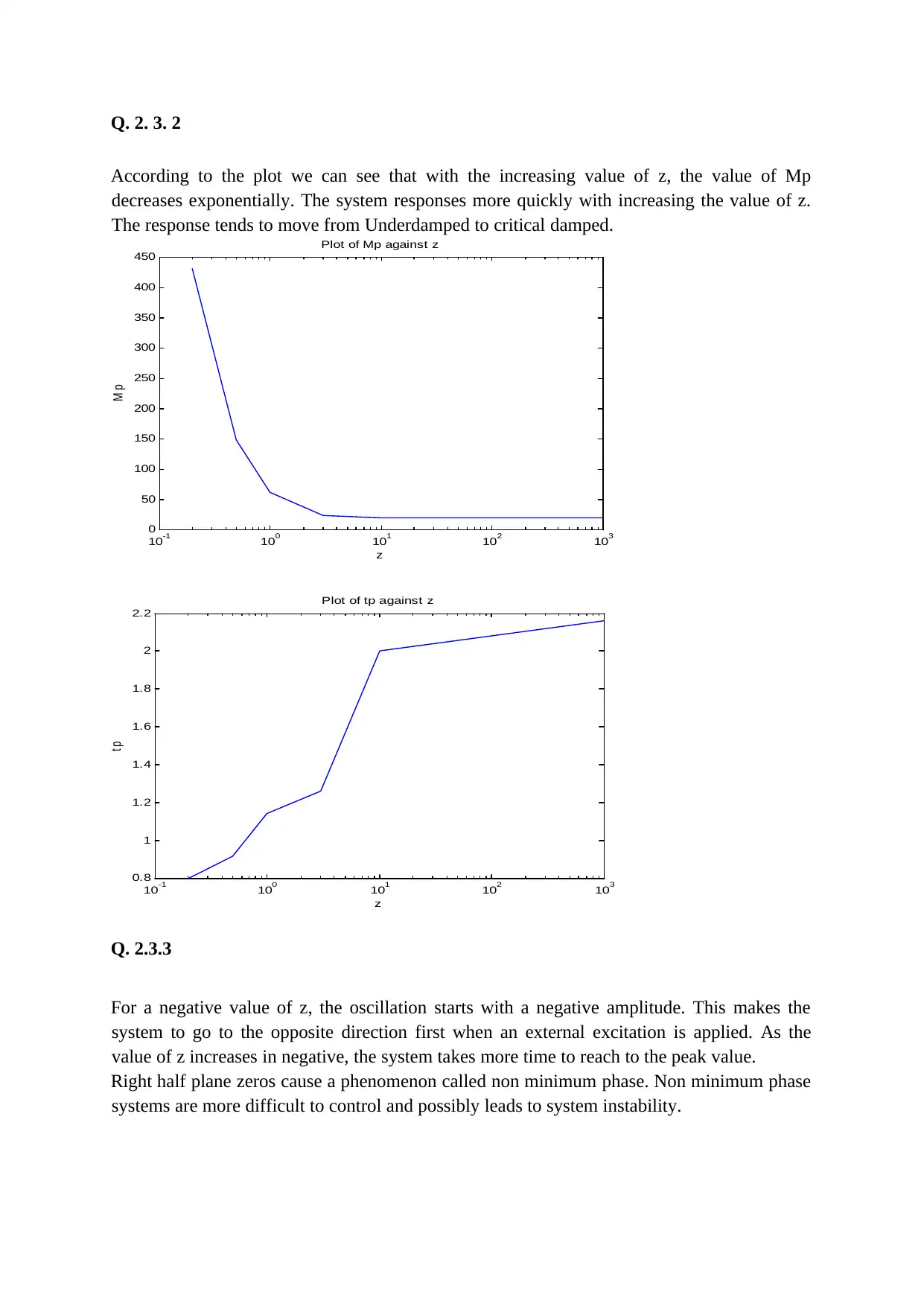
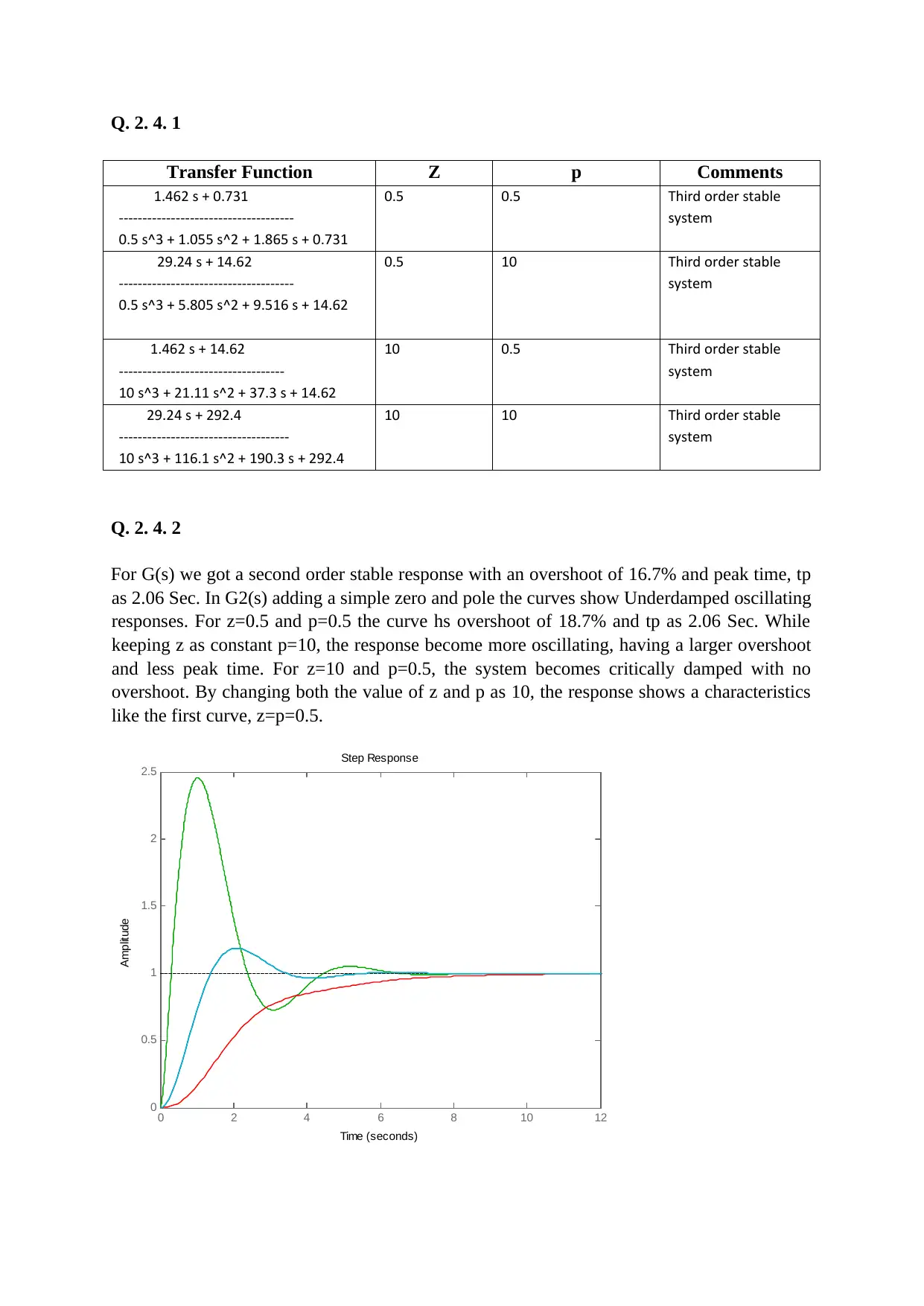
This homework assignment analyzes the characteristics of linear dynamic systems, focusing on second-order systems and their responses. It examines a continuous-time transfer function, calculating natural frequency, damping ratio, and pole values to determine system stability and response characteristics like overshoot and peak time. The solution explores the effects of varying parameters (p and z) on system behavior, including overdamped, critically damped, and underdamped responses, as well as the impact of negative parameter values. Step responses are analyzed, and the relationship between parameters and performance metrics like overshoot and peak time are discussed. The assignment also considers the influence of zeros on system behavior and non-minimum phase systems.

1 out of 6
Related Documents




Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Copyright © 2020–2025 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.