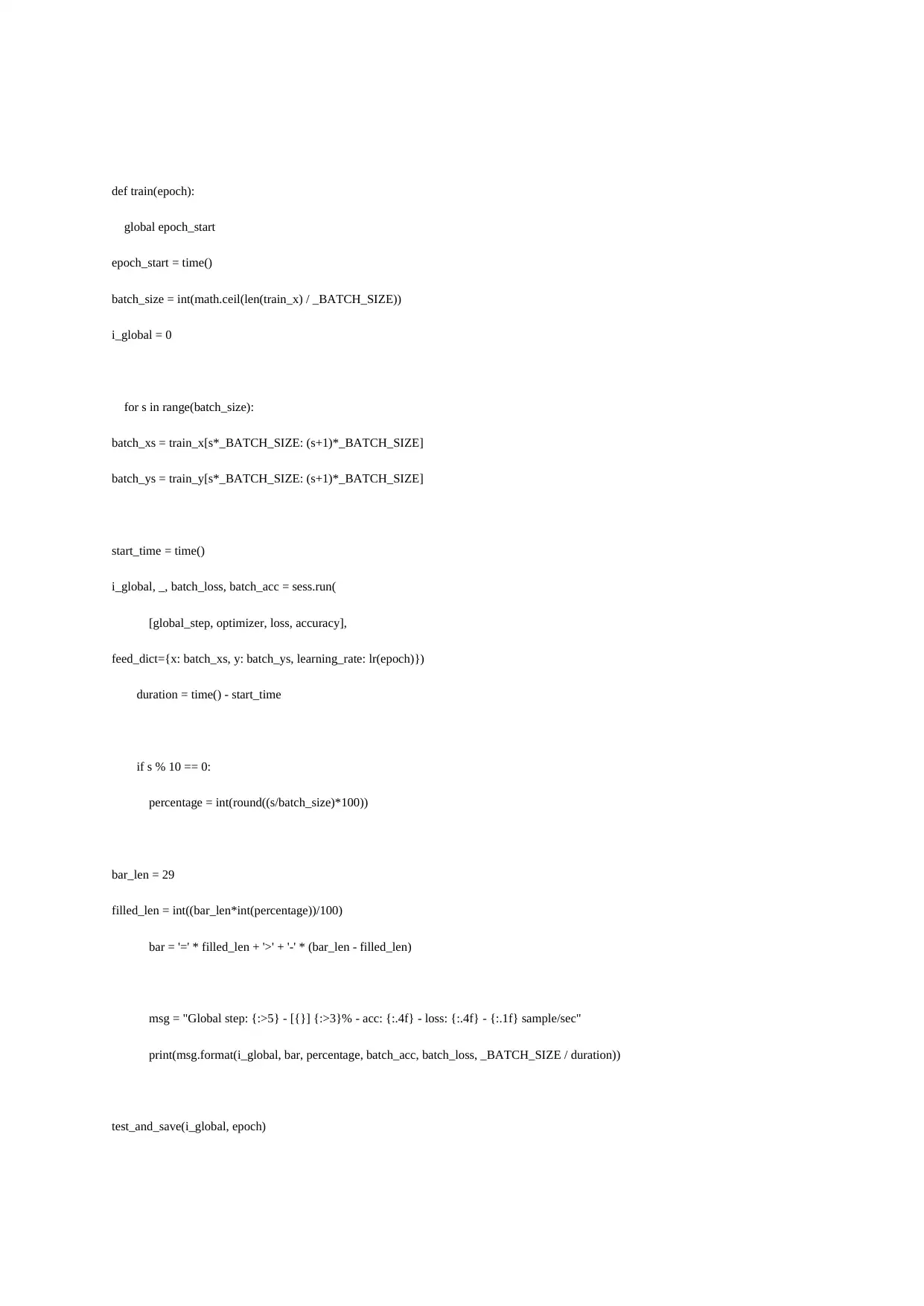
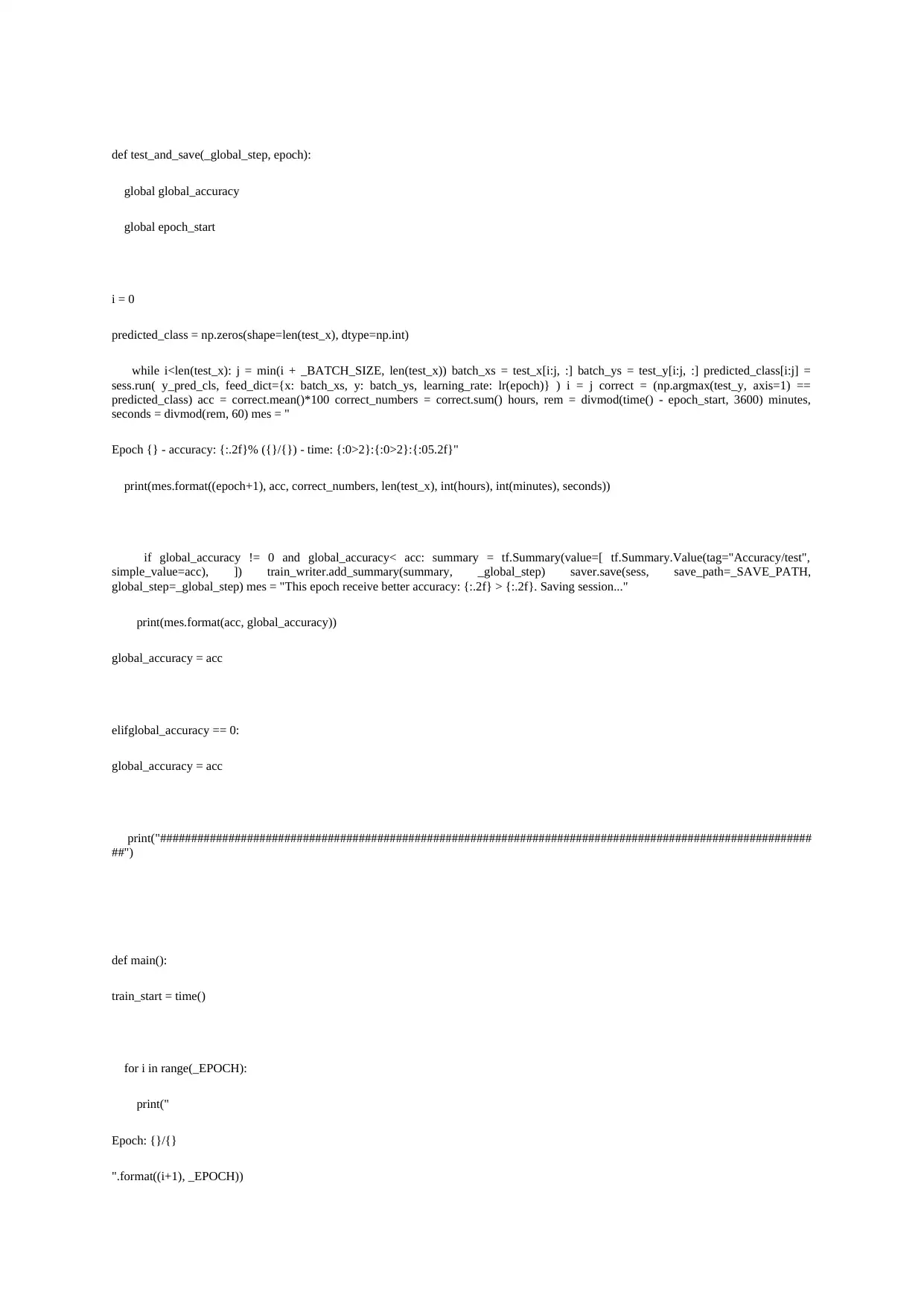
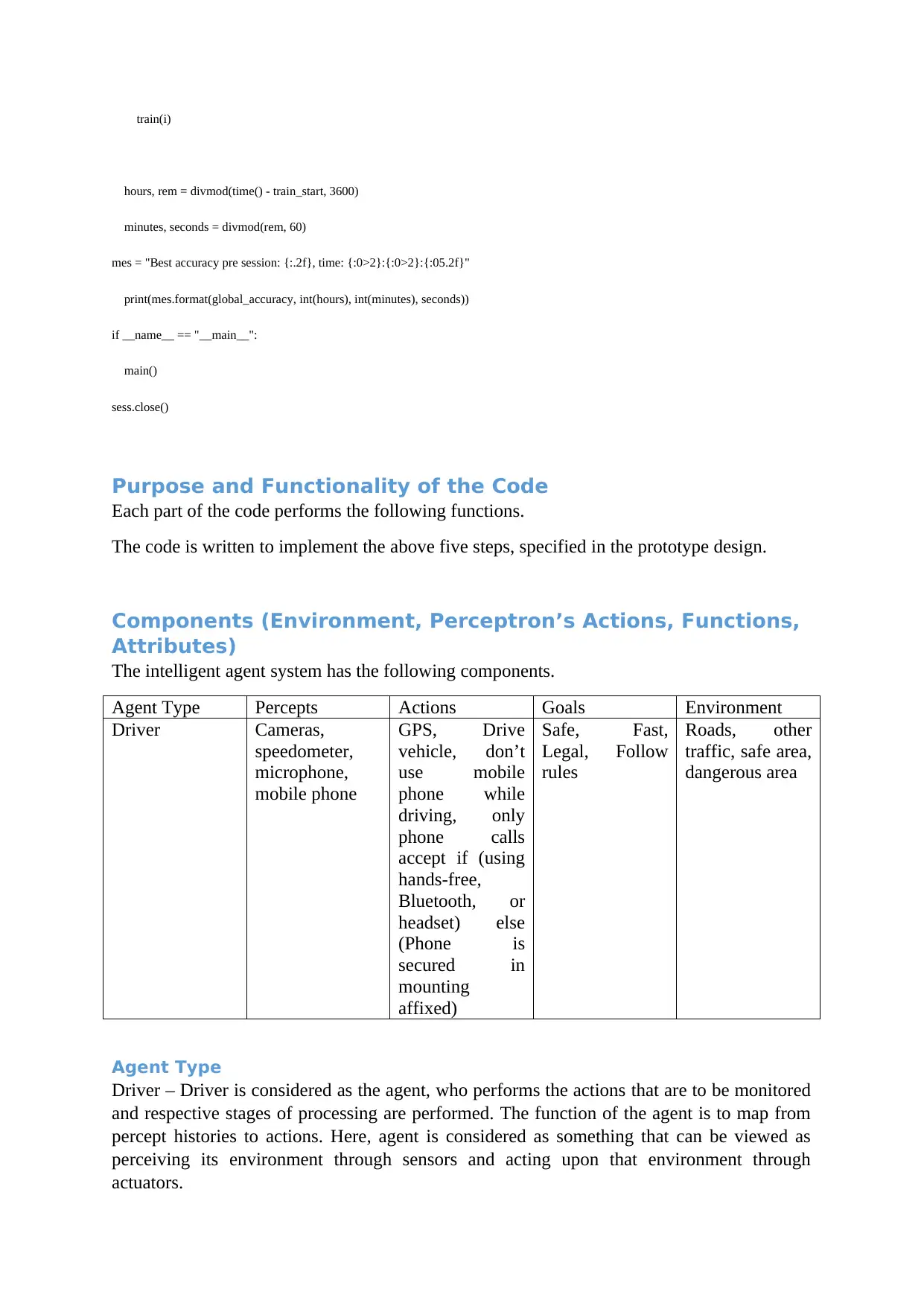
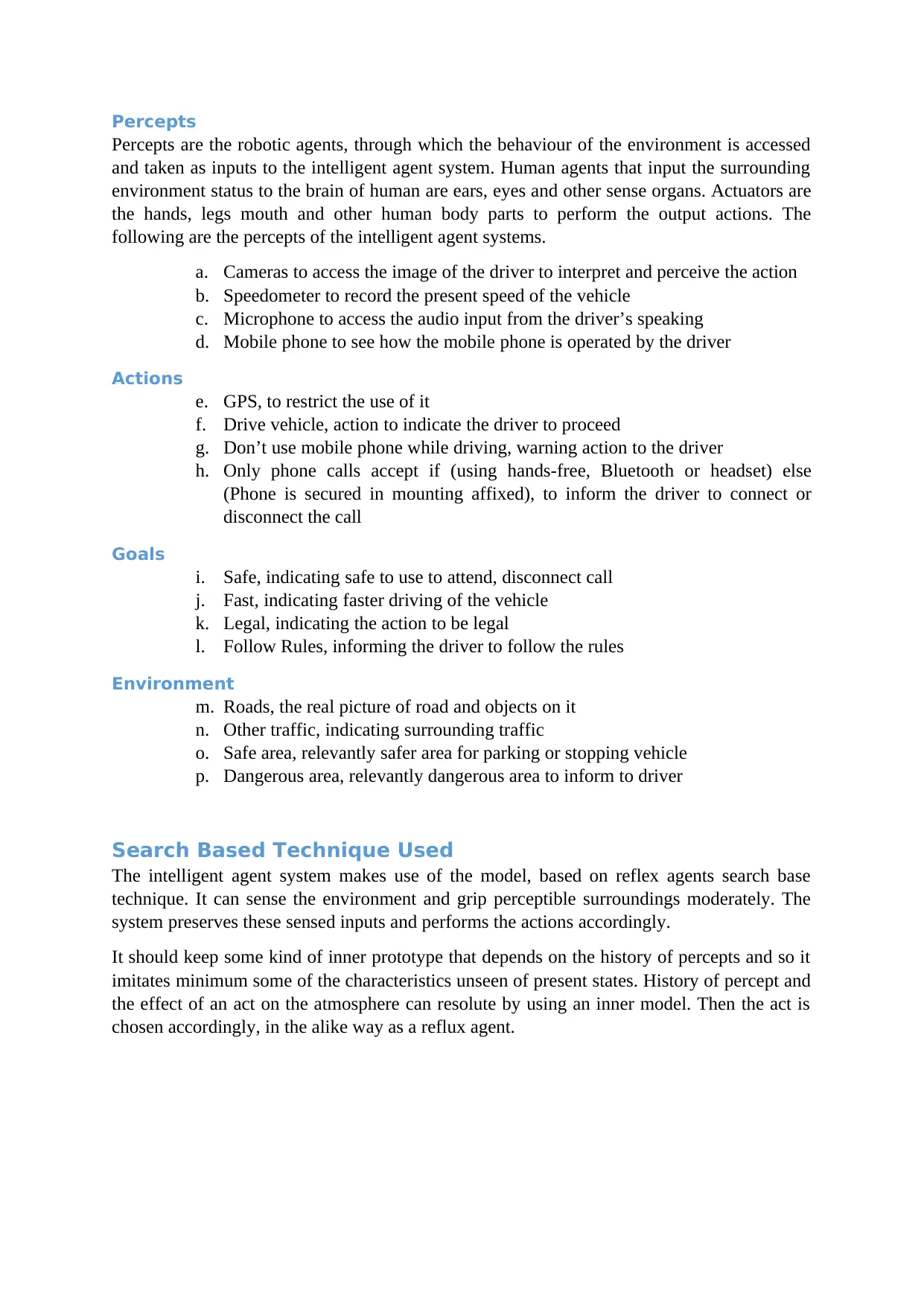
This article discusses the design and implementation of an intelligent agent for driving safety. It explores the use of a convolutional neural network (CNN) algorithm to analyze and predict driving postures. The agent aims to help drivers drive safely by monitoring and preventing distracted driving, such as using a mobile phone while driving. The article also highlights the importance of driving laws and provides statistical evidence on the dangers of distracted driving. The prototype design and steps of the intelligent agent are explained, along with the pseudocode algorithm and code implementation using the CNN algorithm. Overall, the article emphasizes the need for intelligent systems to improve road safety.
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)