Analysis of 2D Image Nature and Data Capture Rate for Nao Robot
VerifiedAdded on 2021/04/16
|7
|1425
|71
Report
AI Summary
This report investigates the challenges of 2D image capture and data processing in robotics, focusing on the Nao robot's computer vision system. It explores how computer vision provides crucial environmental information for robot navigation and interaction. The study examines the importance of image characteristics like position, size, distance, and volatility, and the difficulties in capturing and processing image data at an optimal rate. The report details an experiment using photometric stereo and AL vision to test the Nao robot's ability to differentiate image signals and its limitations. The findings highlight the relationship between image quality, AL vision sensitivity, and the robot's ability to respond to signals, concluding that the 2D nature of images significantly impacts the rate of quality data capture. The report also discusses risk assessments, testing procedures, outcomes, and reflections on the algorithm's accuracy in image recognition and processing, as well as the impact of image characteristics on data collection efficiency.

A report on 2D dimensional nature of image and rate of capturing image data with the Nao
Name
Institution
Professor
Course
Date
Name
Institution
Professor
Course
Date
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
Problem statement
There has been controversy over the planning and navigation of Robots through its
specific environment. In order to create an autonomous planning, clear understanding of the
environment is required. A computer vision system can be used to provide any pertinent
information about required robot environment (Zhang et al, 2013). Captured data would help
robots to interact with its agents while navigating through the environment in order to track
them. In this regard, the concept of computer vision systems and robotic visual tracking is of
great importance (Moreno et al, 2012). To interact with the environment, a robot makes use of
images that contain useful data about objects properties such as its positions, sizes, distance, and
volatility. When capturing required data, the 2-D nature of capturing images and the rate used to
capture these images have been of great challenge (Maini & Aggarwal, 2009). The problem of
capturing images is complicated by the lack of computer vision signals that can process and
transmit image data at the optimal rate. Therefore, this paper tries to investigate the nature of
images and the rate at which required robotic image data is captured through the use of computer
vision.
Background information
Computer vision relies mainly on image processing and analysis that tends to emphasis
on 2 D images to capture and process robotic required data (Barakova & Lourens, 2010). The
process tries to visualize on how to transform images through the use of pixel, edge removal, and
application of 2D images. The important aspect to note in this case is that, computer vision does
not require any pre-determined complex assumptions to capture quality image data (Obwald,
Hornung & Bennewitz, 2010). Mainly, a robot should be able to determine the nature of the
There has been controversy over the planning and navigation of Robots through its
specific environment. In order to create an autonomous planning, clear understanding of the
environment is required. A computer vision system can be used to provide any pertinent
information about required robot environment (Zhang et al, 2013). Captured data would help
robots to interact with its agents while navigating through the environment in order to track
them. In this regard, the concept of computer vision systems and robotic visual tracking is of
great importance (Moreno et al, 2012). To interact with the environment, a robot makes use of
images that contain useful data about objects properties such as its positions, sizes, distance, and
volatility. When capturing required data, the 2-D nature of capturing images and the rate used to
capture these images have been of great challenge (Maini & Aggarwal, 2009). The problem of
capturing images is complicated by the lack of computer vision signals that can process and
transmit image data at the optimal rate. Therefore, this paper tries to investigate the nature of
images and the rate at which required robotic image data is captured through the use of computer
vision.
Background information
Computer vision relies mainly on image processing and analysis that tends to emphasis
on 2 D images to capture and process robotic required data (Barakova & Lourens, 2010). The
process tries to visualize on how to transform images through the use of pixel, edge removal, and
application of 2D images. The important aspect to note in this case is that, computer vision does
not require any pre-determined complex assumptions to capture quality image data (Obwald,
Hornung & Bennewitz, 2010). Mainly, a robot should be able to determine the nature of the
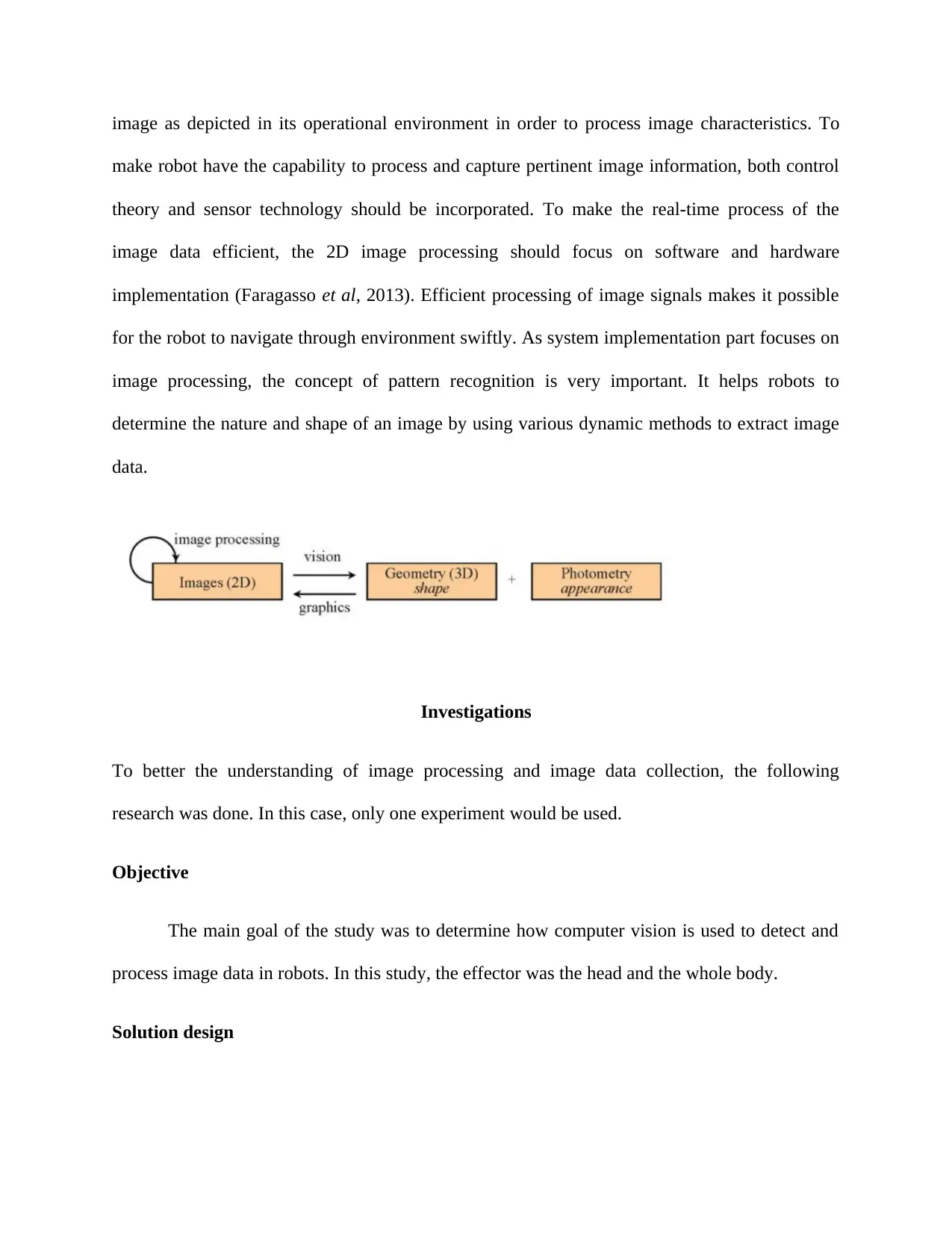
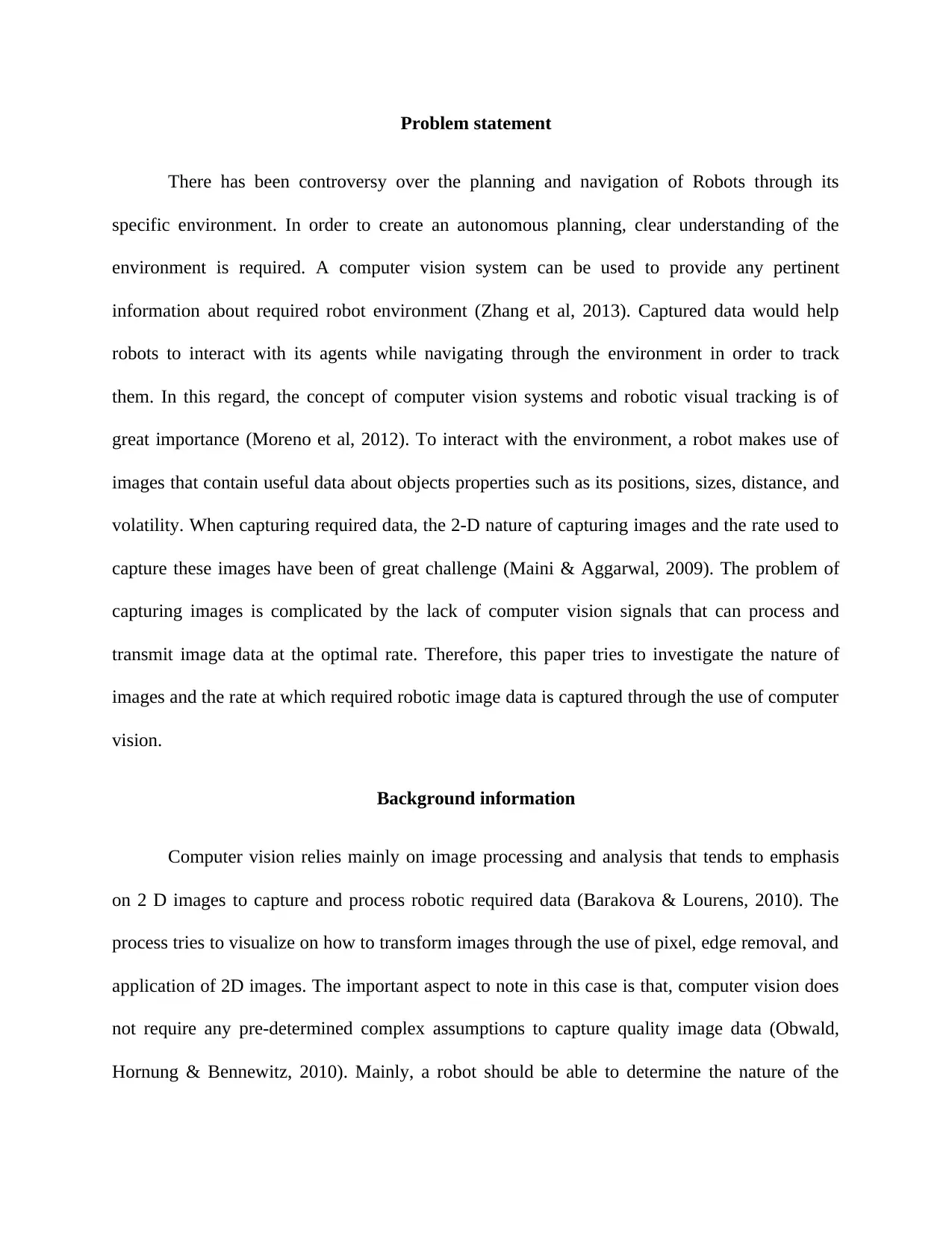
image as depicted in its operational environment in order to process image characteristics. To
make robot have the capability to process and capture pertinent image information, both control
theory and sensor technology should be incorporated. To make the real-time process of the
image data efficient, the 2D image processing should focus on software and hardware
implementation (Faragasso et al, 2013). Efficient processing of image signals makes it possible
for the robot to navigate through environment swiftly. As system implementation part focuses on
image processing, the concept of pattern recognition is very important. It helps robots to
determine the nature and shape of an image by using various dynamic methods to extract image
data.
Investigations
To better the understanding of image processing and image data collection, the following
research was done. In this case, only one experiment would be used.
Objective
The main goal of the study was to determine how computer vision is used to detect and
process image data in robots. In this study, the effector was the head and the whole body.
Solution design
make robot have the capability to process and capture pertinent image information, both control
theory and sensor technology should be incorporated. To make the real-time process of the
image data efficient, the 2D image processing should focus on software and hardware
implementation (Faragasso et al, 2013). Efficient processing of image signals makes it possible
for the robot to navigate through environment swiftly. As system implementation part focuses on
image processing, the concept of pattern recognition is very important. It helps robots to
determine the nature and shape of an image by using various dynamic methods to extract image
data.
Investigations
To better the understanding of image processing and image data collection, the following
research was done. In this case, only one experiment would be used.
Objective
The main goal of the study was to determine how computer vision is used to detect and
process image data in robots. In this study, the effector was the head and the whole body.
Solution design
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
To come up with the solution to the problem, the robotic image detection, and signal
processing collection used the data flow below to test its capability. Once an image was set,
several parameters were set. These included; color, size, and shape. The testing requires a sensor
box to help in detecting images in regard to different image characteristics provided. The
photometric stereo would be used to detect the image and its characteristics and give out signals
in various colors.
Risk assessment and precautions
The robot was faced with various challenges when detecting and processing various
image data. Poor detection and interpretation of the data signals from the image makes the robot
to take wrong actions. A good example would be if a red signal is detected robot should make an
immediate turn to avoid any harm. The unanticipated turn might cause abrupt movement of the
body causing joints dislocation. It is important to make sure photometric stereo processes signals
appropriately to avoid unnecessary movements of the robot.
Testing procedure
processing collection used the data flow below to test its capability. Once an image was set,
several parameters were set. These included; color, size, and shape. The testing requires a sensor
box to help in detecting images in regard to different image characteristics provided. The
photometric stereo would be used to detect the image and its characteristics and give out signals
in various colors.
Risk assessment and precautions
The robot was faced with various challenges when detecting and processing various
image data. Poor detection and interpretation of the data signals from the image makes the robot
to take wrong actions. A good example would be if a red signal is detected robot should make an
immediate turn to avoid any harm. The unanticipated turn might cause abrupt movement of the
body causing joints dislocation. It is important to make sure photometric stereo processes signals
appropriately to avoid unnecessary movements of the robot.
Testing procedure
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
This program makes use of photometric stereo and AL vision which made it difficult to
test it on a simulator. In order to make its actions real-time, a real robot was used to when
running and testing the program. Careful attention was to avoid negative interpretation of the
signals generated by the images that control the robot movement in its environment. Two
NaoMark images were used; negative and positive one to help in determining robotic capability
to detect various signals.
Testing outcomes
The AL vision and photometric stereo worked according to the expectations. The robot
was able to differentiate various signals that were generated from the images. When images
generating the signal distance were moved far, AL vision sensitivity was poor which is quite
normal because it is calculated to work within a specific range of distance from the images. With
the specified distance, the robot responded positively to all images generating signals. When un-
programmed signals (negative) were generated, the robot did not respond, and that was a very
perfect response to limit unrealistic movements that can be harmful. Therefore, the 2D nature of
image perfectly determined the rate of Nao robot to capture quality data.
Reflection
The signals generated by the images to help the robot to sense and detect the nature of
image characteristics in 2D demonstrated the ability of the Nao robot to use signals to perceive
and analyze images. From the analysis of the outcomes, it was found that the algorithm used in
image recognition and processing was accurate. The nature of the signal detected by
photometric stereo controlled robot AL vision. The nature and characteristics of the images
test it on a simulator. In order to make its actions real-time, a real robot was used to when
running and testing the program. Careful attention was to avoid negative interpretation of the
signals generated by the images that control the robot movement in its environment. Two
NaoMark images were used; negative and positive one to help in determining robotic capability
to detect various signals.
Testing outcomes
The AL vision and photometric stereo worked according to the expectations. The robot
was able to differentiate various signals that were generated from the images. When images
generating the signal distance were moved far, AL vision sensitivity was poor which is quite
normal because it is calculated to work within a specific range of distance from the images. With
the specified distance, the robot responded positively to all images generating signals. When un-
programmed signals (negative) were generated, the robot did not respond, and that was a very
perfect response to limit unrealistic movements that can be harmful. Therefore, the 2D nature of
image perfectly determined the rate of Nao robot to capture quality data.
Reflection
The signals generated by the images to help the robot to sense and detect the nature of
image characteristics in 2D demonstrated the ability of the Nao robot to use signals to perceive
and analyze images. From the analysis of the outcomes, it was found that the algorithm used in
image recognition and processing was accurate. The nature of the signal detected by
photometric stereo controlled robot AL vision. The nature and characteristics of the images
generated by the photometric stereo were useful to determine the rate of image data collection.
Poor images meant unreliable data would be collected.
Conclusion
This investigation narrowed down to the ability of a robot to detect the nature of 2D
images through the use of photometric and AL vision. Further, it focused on ability and
limitations of Nao robot to perceive and interpret images through AL vision. Analysis of the final
outcome showed that the nature of the image as perceived by the AL vision was relative to its
characteristics. The poor image depicted low AL vision which made it difficult to capture quality
image data. Finally, various image signals were captured by the AL vision sensor to help in
controlling the Nao robot motion.
References
Barakova, E. I., & Lourens, T. (2010). Expressing and interpreting emotional movements in
social games with robots. Personal and ubiquitous computing, 14(5), 457-467.
Faragasso, A., Oriolo, G., Paolillo, A., & Vendittelli, M. (2013, May). Vision-based corridor
navigation for humanoid robots. In Robotics and Automation (ICRA), 2013 IEEE
International Conference on (pp. 3190-3195). IEEE.
Maini, R., & Aggarwal, H. (2009). Study and comparison of various image edge detection
techniques. International journal of image processing (IJIP), 3(1), 1-11.
Poor images meant unreliable data would be collected.
Conclusion
This investigation narrowed down to the ability of a robot to detect the nature of 2D
images through the use of photometric and AL vision. Further, it focused on ability and
limitations of Nao robot to perceive and interpret images through AL vision. Analysis of the final
outcome showed that the nature of the image as perceived by the AL vision was relative to its
characteristics. The poor image depicted low AL vision which made it difficult to capture quality
image data. Finally, various image signals were captured by the AL vision sensor to help in
controlling the Nao robot motion.
References
Barakova, E. I., & Lourens, T. (2010). Expressing and interpreting emotional movements in
social games with robots. Personal and ubiquitous computing, 14(5), 457-467.
Faragasso, A., Oriolo, G., Paolillo, A., & Vendittelli, M. (2013, May). Vision-based corridor
navigation for humanoid robots. In Robotics and Automation (ICRA), 2013 IEEE
International Conference on (pp. 3190-3195). IEEE.
Maini, R., & Aggarwal, H. (2009). Study and comparison of various image edge detection
techniques. International journal of image processing (IJIP), 3(1), 1-11.
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
Moreno, R., Grana, M., Ramik, D. M., & Madani, K. (2012). Image segmentation on spherical
coordinate representation of RGB colour space. IET Image Processing, 6(9), 1275-1283.
Obwald, S., Hornung, A., & Bennewitz, M. (2010, May). Learning reliable and efficient
navigation with a humanoid. In Robotics and Automation (ICRA), 2010 IEEE
International Conference on (pp. 2375-2380). IEEE.
Zhang, L., Jiang, M., Farid, D., & Hossain, M. A. (2013). Intelligent facial emotion recognition
and semantic-based topic detection for a humanoid robot. Expert Systems with
Applications, 40(13), 5160-5168.
coordinate representation of RGB colour space. IET Image Processing, 6(9), 1275-1283.
Obwald, S., Hornung, A., & Bennewitz, M. (2010, May). Learning reliable and efficient
navigation with a humanoid. In Robotics and Automation (ICRA), 2010 IEEE
International Conference on (pp. 2375-2380). IEEE.
Zhang, L., Jiang, M., Farid, D., & Hossain, M. A. (2013). Intelligent facial emotion recognition
and semantic-based topic detection for a humanoid robot. Expert Systems with
Applications, 40(13), 5160-5168.
1 out of 7