Robots in Mining Applications: Challenges and Future Directions
VerifiedAdded on 2019/12/28
|15
|3944
|323
Report
AI Summary
This report provides a comprehensive literature review on the application of robots in various mining operations. It explores the use of robots in underground coal mining, seafloor mining, and mine rescue operations, highlighting their ability to reduce risks, improve efficiency, and access areas inaccessible to humans. The report analyzes four key articles, discussing the challenges and benefits of implementing robotics in the mining industry, including the reduction of human risks, increased productivity, and the use of remotely operated vehicles (ROVs). The report also examines specific robotic systems like Wolverine V2, Gemini Scout, and Numbat, along with the challenges of job displacement and the need for skilled labor. The conclusion discusses the need for further research and development in this area, especially in the context of sea-floor mining activities.
Robots in Mining
Applications
Applications
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
TABLE OF CONTENTS
ABSTRACT.....................................................................................................................................3
INTRODUCTION ..........................................................................................................................4
LITERATURE REVIEW – ROBOTS IN MINING APPLICATIONS..........................................4
CONCLUSION ...............................................................................................................................9
REFERENCES..............................................................................................................................11
2
ABSTRACT.....................................................................................................................................3
INTRODUCTION ..........................................................................................................................4
LITERATURE REVIEW – ROBOTS IN MINING APPLICATIONS..........................................4
CONCLUSION ...............................................................................................................................9
REFERENCES..............................................................................................................................11
2
Illustration Index
Illustration 1: Gemini Scout...........................................................................................................10
Illustration 2: Wolverine V2..........................................................................................................11
Illustration 3: CSIRO Numbat.......................................................................................................12
Illustration 4: Sub-terranean Robot................................................................................................12
3
Illustration 1: Gemini Scout...........................................................................................................10
Illustration 2: Wolverine V2..........................................................................................................11
Illustration 3: CSIRO Numbat.......................................................................................................12
Illustration 4: Sub-terranean Robot................................................................................................12
3
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
ABSTRACT
Robots were earlier the imagination of individuals because technology was not so
advanced to create a machine that could interact with humans and perform operations equivalent
to both humans and machines simultaneously. The articles :“A Robotic System for Underground
Coal Mining”, “Mining the Seafloor with Robots ”, “Mine Rescue Robot System – A Review”
and “Scope and challenges for robotics in Mining Engineering Applications” describe the
application of robots in mining operations. The use of robots can not only reduce the risks and
threats which occur to health and life of individuals who are working in mines but also improve
the productivity and efficiency of concerned operation. The application of these robots is just not
limited to land activities but are also valid in the underwater mining operations.
4
Robots were earlier the imagination of individuals because technology was not so
advanced to create a machine that could interact with humans and perform operations equivalent
to both humans and machines simultaneously. The articles :“A Robotic System for Underground
Coal Mining”, “Mining the Seafloor with Robots ”, “Mine Rescue Robot System – A Review”
and “Scope and challenges for robotics in Mining Engineering Applications” describe the
application of robots in mining operations. The use of robots can not only reduce the risks and
threats which occur to health and life of individuals who are working in mines but also improve
the productivity and efficiency of concerned operation. The application of these robots is just not
limited to land activities but are also valid in the underwater mining operations.
4
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
INTRODUCTION
Robotics is the branch of science, specifically engineering which includes an
amalgamation of different other branches i.e. electrical, computer science, mechanical, etc. A
robot is a man-made structure which is designed and constructed for aiding human activities
which require more efforts. These comprise of instilled computer systems with respective
sensory feedback pathways that help in processing information in a better manner. In this
assessment, the application of robots in mining industry has been provided. The four articles
which are to be considered for the development of this project include “A Robotic System for
Underground Coal Mining”, “Mining the Seafloor with Robots ”, “Mine Rescue Robot System –
A Review” and “Scope and challenges for robotics in Mining Engineering Applications”.
LITERATURE REVIEW – ROBOTS IN MINING APPLICATIONS
Mining is the process or industrial activity which involves the extraction of different
minerals and valuable elements from deep inside the earth or beneath waters. The purpose
behind this extraction is to provide respective raw material for other processes. Ajwad and Iqbal,
(2014) accounted that robotics and automation are considered as a boon to the business
enterprises but consequently it has created great barriers for employment opportunities.
According to Atmanand and Ramadass (2017), underground mining operations have been full of
risk and threats to the human life. The introduction of robotic systems in these kinds of
operations has caused certain type of security system and safeguarding for the miners or workers.
Threats are present in the form of falling of roof or the sides of mine, air blasts, gas explosions,
dust blasts, sudden outbreak of fire, etc. (Shaffer and Stentz, 1992).
Coal mines and the non-coal mines have different possibilities and threats because of the
environmental conditions. There are toxic gases like carbon monoxide, hydrogen sulphide,
different nitrous oxides, etc. As per the views of Belal and Mahjabin (2016), several control
measures are always required for enhancing the safety conditions for workers in such hazardous
environments. Hence, there is a need for scientific development which can reduce the harmful
effects and consequences of mining. Robotics science has helped in solving these system related
problems and issues of mining to a great extent. Reddy Kalyan and Murthy, Ch., (2015)
identified that there are some components of mining which are not accessible by manual labour.
5
Robotics is the branch of science, specifically engineering which includes an
amalgamation of different other branches i.e. electrical, computer science, mechanical, etc. A
robot is a man-made structure which is designed and constructed for aiding human activities
which require more efforts. These comprise of instilled computer systems with respective
sensory feedback pathways that help in processing information in a better manner. In this
assessment, the application of robots in mining industry has been provided. The four articles
which are to be considered for the development of this project include “A Robotic System for
Underground Coal Mining”, “Mining the Seafloor with Robots ”, “Mine Rescue Robot System –
A Review” and “Scope and challenges for robotics in Mining Engineering Applications”.
LITERATURE REVIEW – ROBOTS IN MINING APPLICATIONS
Mining is the process or industrial activity which involves the extraction of different
minerals and valuable elements from deep inside the earth or beneath waters. The purpose
behind this extraction is to provide respective raw material for other processes. Ajwad and Iqbal,
(2014) accounted that robotics and automation are considered as a boon to the business
enterprises but consequently it has created great barriers for employment opportunities.
According to Atmanand and Ramadass (2017), underground mining operations have been full of
risk and threats to the human life. The introduction of robotic systems in these kinds of
operations has caused certain type of security system and safeguarding for the miners or workers.
Threats are present in the form of falling of roof or the sides of mine, air blasts, gas explosions,
dust blasts, sudden outbreak of fire, etc. (Shaffer and Stentz, 1992).
Coal mines and the non-coal mines have different possibilities and threats because of the
environmental conditions. There are toxic gases like carbon monoxide, hydrogen sulphide,
different nitrous oxides, etc. As per the views of Belal and Mahjabin (2016), several control
measures are always required for enhancing the safety conditions for workers in such hazardous
environments. Hence, there is a need for scientific development which can reduce the harmful
effects and consequences of mining. Robotics science has helped in solving these system related
problems and issues of mining to a great extent. Reddy Kalyan and Murthy, Ch., (2015)
identified that there are some components of mining which are not accessible by manual labour.
5
Computerised technological use creates a pathway for accessing such metalliferous deposits
which are out of reach of humans (Bogue and Bogue, 2015).
Automated machines are completely programmed and designed for a particular purpose
with repetitive operations. Mining robots require high degree of accuracy and precision when it
comes to performing their operations (Bogue, 2016). Since, large geographical area is required,
there has to be proper designing in terms of mobility and sensing competencies. Bogue, (2016)
recognised that artificial intelligence is one of the major scientific developments that can be
utilised for development of business operations with greater efficiency. Mining is one such
industrial field that requires robust machinery and skilful labour to perform the functions and
operations. Sea mining is also a risk oriented task that requires lot of monitoring and
precautionary measures for successfully extracting the elements and composites (Boillot,
Dhoutaut and Bourgeois, 2014).
As the quantities of precious elements and metals are reducing due to excessive
extraction from land mines, the major functional companies and various national governments
have directed mining operations to the marine level. Camacho-Cardoza and Ledee, (2017) stated
that remotely operated vehicles are the forefront of this mining activity. Despite of the fact that
actual depth and quantity of material to be extracted from a region in the sea is very uncertain,
there have been significant developments for exploring and extracting the material. According to
Cui and et. al., (2013), ocean mining vehicles are certain robots which have the capability for
enhancing the vision and going about 200 meters under the sea for finding the exact location of
source material. The Korean Ocean Research and Development Institute (Emmet Cole, 2012) has
conducted various research activities which are completely focused on the development of
technologically advanced devices which will be helpful in conducting mining activities in the
ocean. They have come up with an ideological vehicle that will perform ocean floor exploration
and aid the deep water mining activities (Emmet Cole. 2012).
6
which are out of reach of humans (Bogue and Bogue, 2015).
Automated machines are completely programmed and designed for a particular purpose
with repetitive operations. Mining robots require high degree of accuracy and precision when it
comes to performing their operations (Bogue, 2016). Since, large geographical area is required,
there has to be proper designing in terms of mobility and sensing competencies. Bogue, (2016)
recognised that artificial intelligence is one of the major scientific developments that can be
utilised for development of business operations with greater efficiency. Mining is one such
industrial field that requires robust machinery and skilful labour to perform the functions and
operations. Sea mining is also a risk oriented task that requires lot of monitoring and
precautionary measures for successfully extracting the elements and composites (Boillot,
Dhoutaut and Bourgeois, 2014).
As the quantities of precious elements and metals are reducing due to excessive
extraction from land mines, the major functional companies and various national governments
have directed mining operations to the marine level. Camacho-Cardoza and Ledee, (2017) stated
that remotely operated vehicles are the forefront of this mining activity. Despite of the fact that
actual depth and quantity of material to be extracted from a region in the sea is very uncertain,
there have been significant developments for exploring and extracting the material. According to
Cui and et. al., (2013), ocean mining vehicles are certain robots which have the capability for
enhancing the vision and going about 200 meters under the sea for finding the exact location of
source material. The Korean Ocean Research and Development Institute (Emmet Cole, 2012) has
conducted various research activities which are completely focused on the development of
technologically advanced devices which will be helpful in conducting mining activities in the
ocean. They have come up with an ideological vehicle that will perform ocean floor exploration
and aid the deep water mining activities (Emmet Cole. 2012).
6
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide

Robots have gained global attention of individuals and organisations especially the
manufacturing and production oriented companies because of the widespread applications. Major
advantage of robotics in mining applications is reduction in costs. There are various expenditures
involved with these aspects when considering the implementation of manual labour. According
to Dunn, Reid and Ralston, (2015), the loss of artificial individuals is not burdening as compared
to the massive deaths which are caused in mining accidents. Be it cyborgs or clones, drones and
androids, these are considered as machines and do not have any sort of emotional connections.
However, the employees that work day and night and risk their lives for the accomplishment of
company goals, if suffer any sort of injury then significant loss occurs (Ege and et. al., 2014).
Therefore, scientific developments have taken pace with regards to exploration vehicles and
machines for mining.
Mining involves different set of activities that happen to be drilling, transportation of
waste or ore materials from one place to another, digging, boring, blasting, etc. As per the views
of Feng and et. al., (2016), even waste management is a risk oriented function in mining.
However, ore transportation is considered as the highest risk oriented factor till date. The
occurrence of a mineral or metal can be in any form. It can be liquid, composite or in the form of
strong solids. According to Gandhi and Armstrong (2016), there are separate containers and
specialised vehicles which are given the function of transporting the elemental form of mineral
7
manufacturing and production oriented companies because of the widespread applications. Major
advantage of robotics in mining applications is reduction in costs. There are various expenditures
involved with these aspects when considering the implementation of manual labour. According
to Dunn, Reid and Ralston, (2015), the loss of artificial individuals is not burdening as compared
to the massive deaths which are caused in mining accidents. Be it cyborgs or clones, drones and
androids, these are considered as machines and do not have any sort of emotional connections.
However, the employees that work day and night and risk their lives for the accomplishment of
company goals, if suffer any sort of injury then significant loss occurs (Ege and et. al., 2014).
Therefore, scientific developments have taken pace with regards to exploration vehicles and
machines for mining.
Mining involves different set of activities that happen to be drilling, transportation of
waste or ore materials from one place to another, digging, boring, blasting, etc. As per the views
of Feng and et. al., (2016), even waste management is a risk oriented function in mining.
However, ore transportation is considered as the highest risk oriented factor till date. The
occurrence of a mineral or metal can be in any form. It can be liquid, composite or in the form of
strong solids. According to Gandhi and Armstrong (2016), there are separate containers and
specialised vehicles which are given the function of transporting the elemental form of mineral
7
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
or element to the desired refinery or factory. When these operations are executed with support of
the robots then there will significant increase in efficiency. The amount of risks and hazards to
the environment and individuals shall decrease (Green, 2013).
In the article “Scope and challenges for robotics in Mining Engineering Applications”,
the challenges and applications of robotics with regards to mining in underground cases has been
described. It enfolds that robotics is a complex scientific application which requires handful of
skilled labour to handle the same. Whereas mining activities are completely oriented with
unskilled labour (Knodt and et. al., 2016). Hence, a significant difference in the demand of
human resource has occurred which automatically affects the activities of mining sector.
According to Liu and et. al., (2014), the challenge faced by mining industry when introducing
automation and robots as an extended application is the loss or reduction in jobs. The consequent
increase in number of unemployed unskilled labour shall directly affect the economic conditions
of native country and further deteriorate the position in national and international markets
(Neumann and et. al., 2014).
Hover, revolution happens to take place when there is introduction of a technique or
strategy that completely advances the current working system. Application of robotics or using
robots in the mining industry has significantly changed or revolutionised the working scenario.
Be it underwater mining activities or the land mining activities, all become much more easier and
efficient when computerised human models in the form of robots are introduced (Raskin, 2015).
ROV or the remotely operated vehicles are one of the revolutionary ideas which have been
implemented for gaining success in terms of efficiency and productivity. Considering the marine
mining operations, there are source of zinc, gold and silver about 1600 meters deep in the sea.
But the ROV has made it easier for conducting such search operations and bringing a new
working direction for the organisations nations in this industry (Seto, Paull and Saeedi, 2013).
According to the article “Mine Rescue Robot System – A Review”, subterranean robots
with high mobility have been developed by different scientific research organisations of USA.
Underground mines are like pits for deaths when it comes to manual labour. Since, the earth's
crust and and core have different temperatures and atmospheric composition. The amount of
oxygen decreases and significant increase in hazardous gases has been witnesses (Shukla and
Karki, 2016). When mining activities take place, the workers use different tools and machines
8
the robots then there will significant increase in efficiency. The amount of risks and hazards to
the environment and individuals shall decrease (Green, 2013).
In the article “Scope and challenges for robotics in Mining Engineering Applications”,
the challenges and applications of robotics with regards to mining in underground cases has been
described. It enfolds that robotics is a complex scientific application which requires handful of
skilled labour to handle the same. Whereas mining activities are completely oriented with
unskilled labour (Knodt and et. al., 2016). Hence, a significant difference in the demand of
human resource has occurred which automatically affects the activities of mining sector.
According to Liu and et. al., (2014), the challenge faced by mining industry when introducing
automation and robots as an extended application is the loss or reduction in jobs. The consequent
increase in number of unemployed unskilled labour shall directly affect the economic conditions
of native country and further deteriorate the position in national and international markets
(Neumann and et. al., 2014).
Hover, revolution happens to take place when there is introduction of a technique or
strategy that completely advances the current working system. Application of robotics or using
robots in the mining industry has significantly changed or revolutionised the working scenario.
Be it underwater mining activities or the land mining activities, all become much more easier and
efficient when computerised human models in the form of robots are introduced (Raskin, 2015).
ROV or the remotely operated vehicles are one of the revolutionary ideas which have been
implemented for gaining success in terms of efficiency and productivity. Considering the marine
mining operations, there are source of zinc, gold and silver about 1600 meters deep in the sea.
But the ROV has made it easier for conducting such search operations and bringing a new
working direction for the organisations nations in this industry (Seto, Paull and Saeedi, 2013).
According to the article “Mine Rescue Robot System – A Review”, subterranean robots
with high mobility have been developed by different scientific research organisations of USA.
Underground mines are like pits for deaths when it comes to manual labour. Since, the earth's
crust and and core have different temperatures and atmospheric composition. The amount of
oxygen decreases and significant increase in hazardous gases has been witnesses (Shukla and
Karki, 2016). When mining activities take place, the workers use different tools and machines
8
that have the probability to catch fire and create accidents. Despite of giving proper training and
making individuals aware about the impact of their job, people risk their lives in such places.
Hence, underground mines are the primary industrial sites which require attention and use of
advanced technologies. Siciliano and Khatib (2016) provided that there are many efficient robots
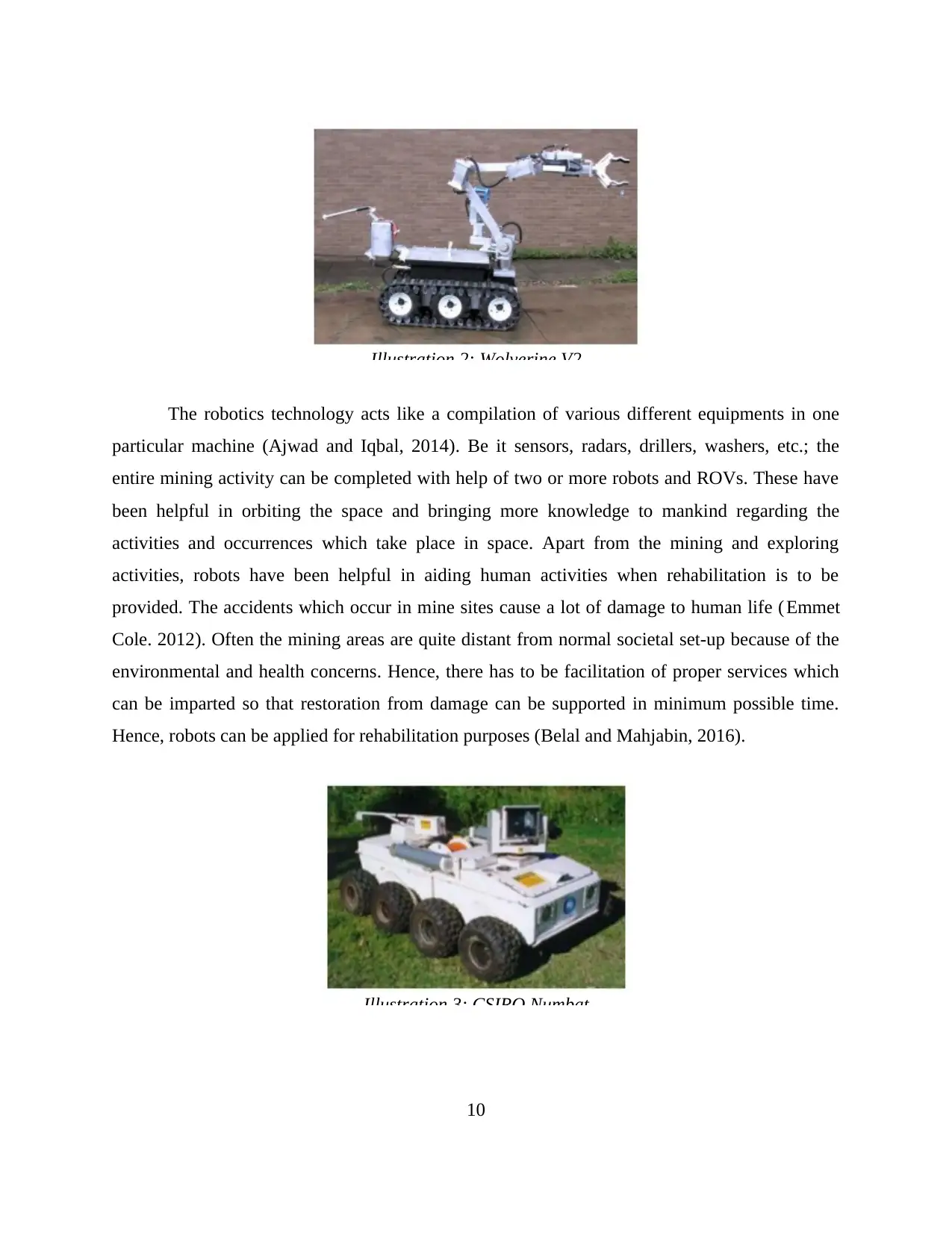
developed in USA with an aim to facilitate health and safety in mines. These include Wolverine
V2, Geminin Scout, Ground Hog, Numbat and Sub-terranean Robot (SR).
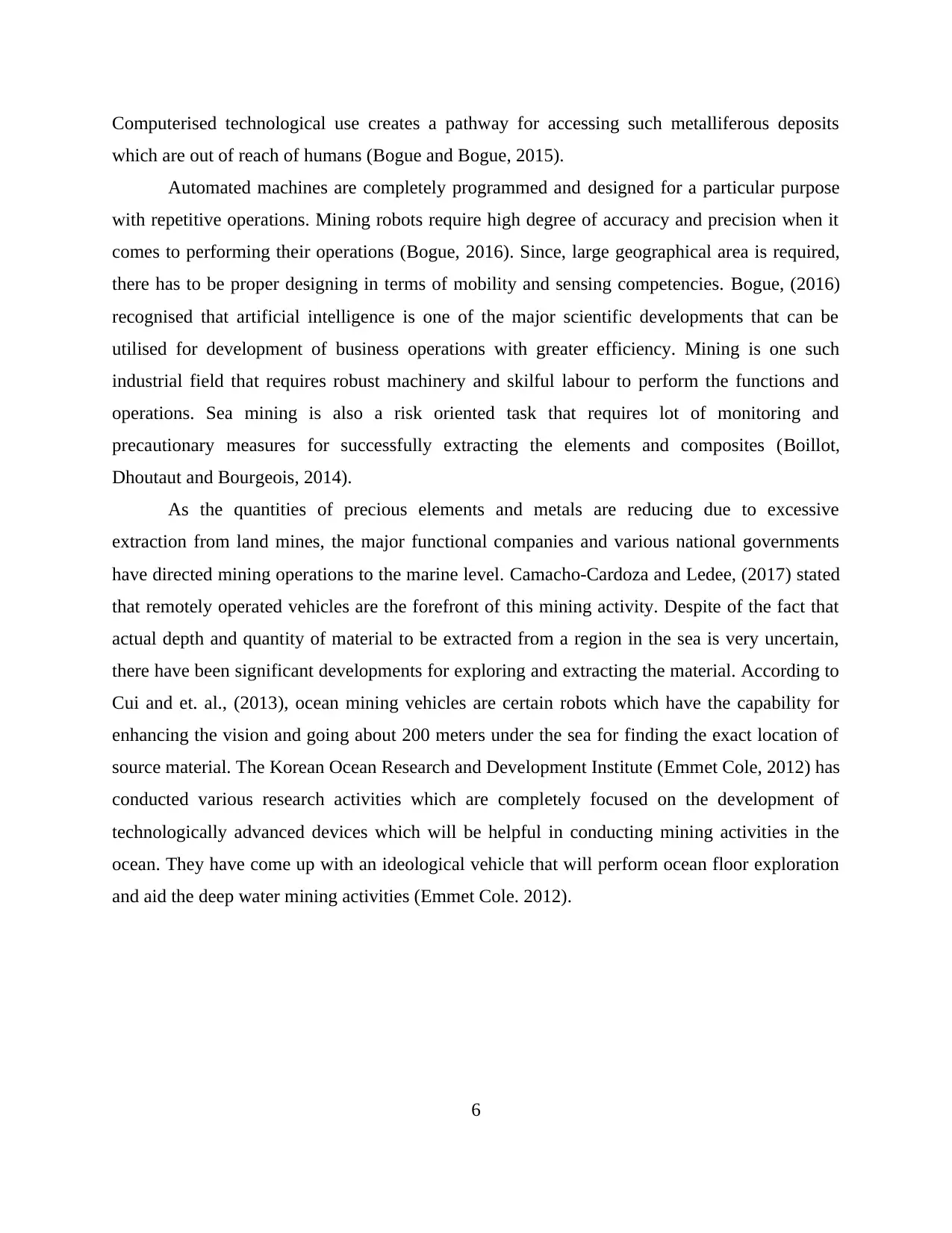
The Wolverine V2 was developed as a military robot and had a gas sensor which helped
in continuously monitoring and sampling the situation with help of three monitoring cameras.
The basic operation was initiated with help of optical fibres. Strong (2016) stated that when
individuals are able to gain the continuous image of current situations in the underground mines
where manual exploration is very dangerous then science has actually contributed something to
revolution. The Wolverine V2 was designed to be 1.27m tall and weighted about 550 kg.
However, this design and structure did not work out and fulfil the major motive for which it was
built. On the contrary, Ground hog was a robot designed with automated systems that had the
ability to explore and map underground mines which were abandoned and had no further use
(Shaffer and Stentz, 1992). There are certain elements and materials which have been taken from
the abandoned mines recently by scientists. In such cases, robotic vehicles help in reducing the
cost of implying new task force for implementing the same task.
9
Illustration 1: Gemini Scout
making individuals aware about the impact of their job, people risk their lives in such places.
Hence, underground mines are the primary industrial sites which require attention and use of
advanced technologies. Siciliano and Khatib (2016) provided that there are many efficient robots
developed in USA with an aim to facilitate health and safety in mines. These include Wolverine
V2, Geminin Scout, Ground Hog, Numbat and Sub-terranean Robot (SR).
The Wolverine V2 was developed as a military robot and had a gas sensor which helped
in continuously monitoring and sampling the situation with help of three monitoring cameras.
The basic operation was initiated with help of optical fibres. Strong (2016) stated that when
individuals are able to gain the continuous image of current situations in the underground mines
where manual exploration is very dangerous then science has actually contributed something to
revolution. The Wolverine V2 was designed to be 1.27m tall and weighted about 550 kg.
However, this design and structure did not work out and fulfil the major motive for which it was
built. On the contrary, Ground hog was a robot designed with automated systems that had the
ability to explore and map underground mines which were abandoned and had no further use
(Shaffer and Stentz, 1992). There are certain elements and materials which have been taken from
the abandoned mines recently by scientists. In such cases, robotic vehicles help in reducing the
cost of implying new task force for implementing the same task.
9
Illustration 1: Gemini Scout
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
The robotics technology acts like a compilation of various different equipments in one
particular machine (Ajwad and Iqbal, 2014). Be it sensors, radars, drillers, washers, etc.; the
entire mining activity can be completed with help of two or more robots and ROVs. These have
been helpful in orbiting the space and bringing more knowledge to mankind regarding the
activities and occurrences which take place in space. Apart from the mining and exploring
activities, robots have been helpful in aiding human activities when rehabilitation is to be
provided. The accidents which occur in mine sites cause a lot of damage to human life ( Emmet
Cole. 2012). Often the mining areas are quite distant from normal societal set-up because of the
environmental and health concerns. Hence, there has to be facilitation of proper services which
can be imparted so that restoration from damage can be supported in minimum possible time.
Hence, robots can be applied for rehabilitation purposes (Belal and Mahjabin, 2016).
10
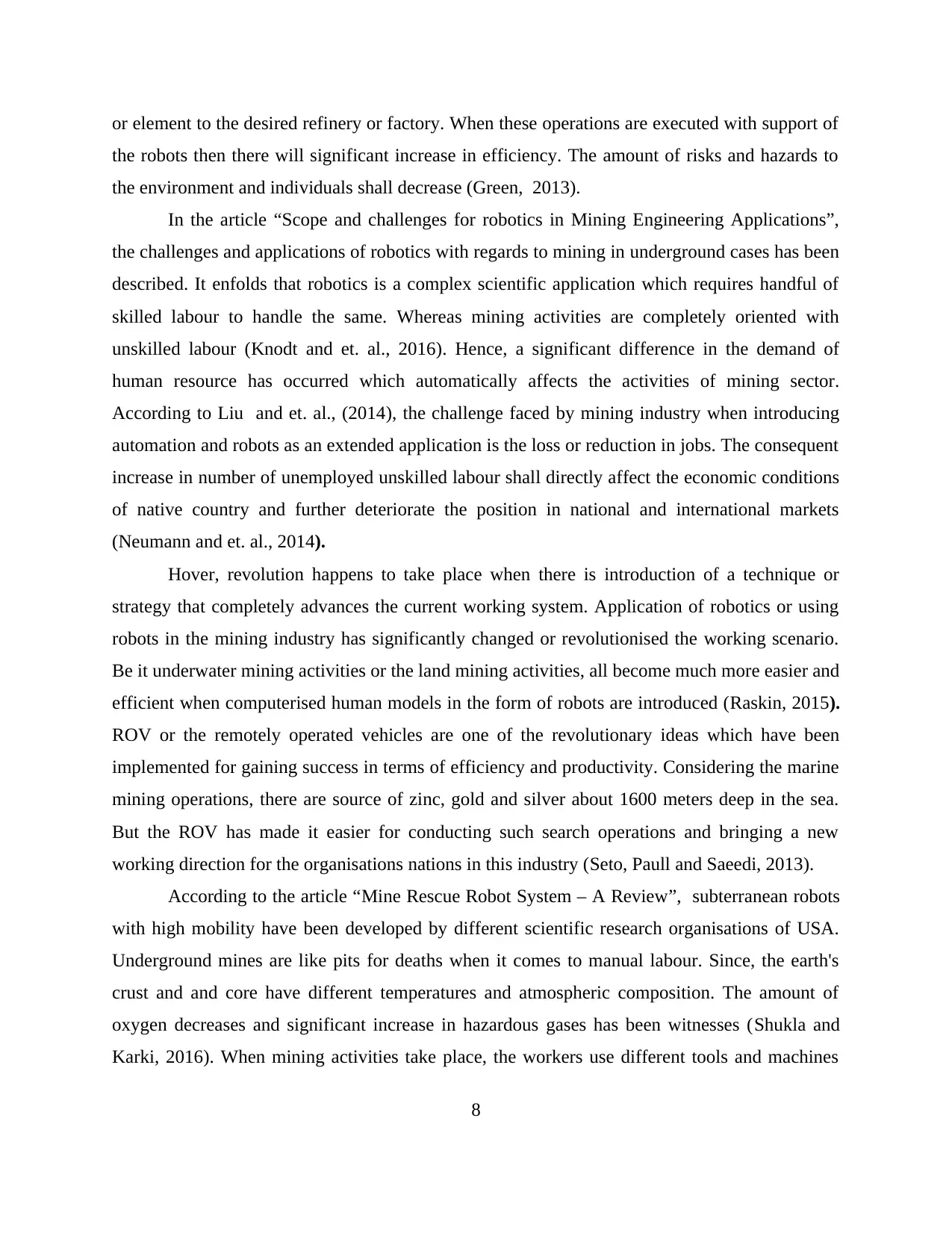
Illustration 2: Wolverine V2
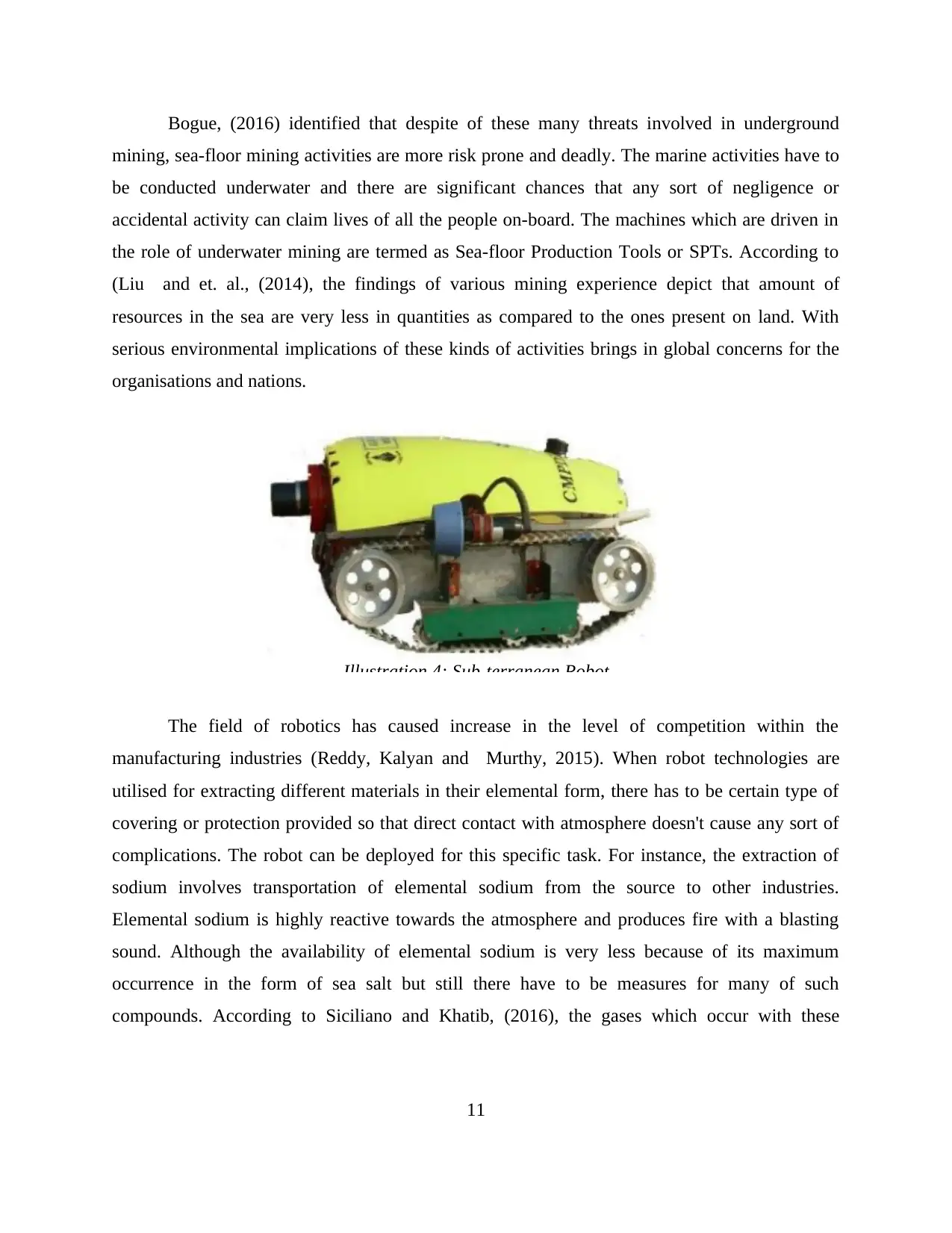
Illustration 3: CSIRO Numbat
particular machine (Ajwad and Iqbal, 2014). Be it sensors, radars, drillers, washers, etc.; the
entire mining activity can be completed with help of two or more robots and ROVs. These have
been helpful in orbiting the space and bringing more knowledge to mankind regarding the
activities and occurrences which take place in space. Apart from the mining and exploring
activities, robots have been helpful in aiding human activities when rehabilitation is to be
provided. The accidents which occur in mine sites cause a lot of damage to human life ( Emmet
Cole. 2012). Often the mining areas are quite distant from normal societal set-up because of the
environmental and health concerns. Hence, there has to be facilitation of proper services which
can be imparted so that restoration from damage can be supported in minimum possible time.
Hence, robots can be applied for rehabilitation purposes (Belal and Mahjabin, 2016).
10
Illustration 2: Wolverine V2
Illustration 3: CSIRO Numbat
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
Bogue, (2016) identified that despite of these many threats involved in underground
mining, sea-floor mining activities are more risk prone and deadly. The marine activities have to
be conducted underwater and there are significant chances that any sort of negligence or
accidental activity can claim lives of all the people on-board. The machines which are driven in
the role of underwater mining are termed as Sea-floor Production Tools or SPTs. According to
(Liu and et. al., (2014), the findings of various mining experience depict that amount of
resources in the sea are very less in quantities as compared to the ones present on land. With
serious environmental implications of these kinds of activities brings in global concerns for the
organisations and nations.
The field of robotics has caused increase in the level of competition within the
manufacturing industries (Reddy, Kalyan and Murthy, 2015). When robot technologies are
utilised for extracting different materials in their elemental form, there has to be certain type of
covering or protection provided so that direct contact with atmosphere doesn't cause any sort of
complications. The robot can be deployed for this specific task. For instance, the extraction of
sodium involves transportation of elemental sodium from the source to other industries.
Elemental sodium is highly reactive towards the atmosphere and produces fire with a blasting
sound. Although the availability of elemental sodium is very less because of its maximum
occurrence in the form of sea salt but still there have to be measures for many of such
compounds. According to Siciliano and Khatib, (2016), the gases which occur with these
11
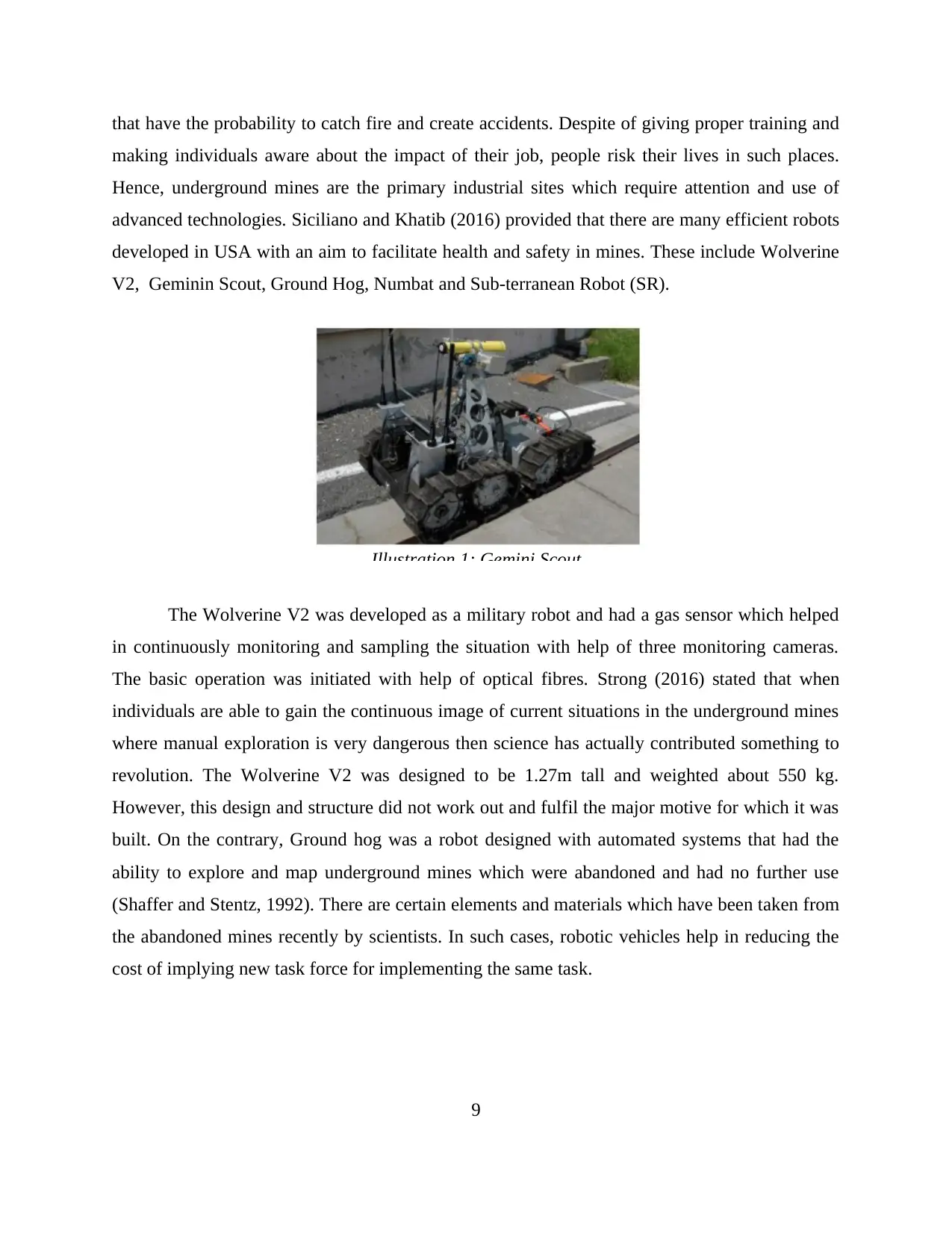
Illustration 4: Sub-terranean Robot
mining, sea-floor mining activities are more risk prone and deadly. The marine activities have to
be conducted underwater and there are significant chances that any sort of negligence or
accidental activity can claim lives of all the people on-board. The machines which are driven in
the role of underwater mining are termed as Sea-floor Production Tools or SPTs. According to
(Liu and et. al., (2014), the findings of various mining experience depict that amount of
resources in the sea are very less in quantities as compared to the ones present on land. With
serious environmental implications of these kinds of activities brings in global concerns for the
organisations and nations.
The field of robotics has caused increase in the level of competition within the
manufacturing industries (Reddy, Kalyan and Murthy, 2015). When robot technologies are
utilised for extracting different materials in their elemental form, there has to be certain type of
covering or protection provided so that direct contact with atmosphere doesn't cause any sort of
complications. The robot can be deployed for this specific task. For instance, the extraction of
sodium involves transportation of elemental sodium from the source to other industries.
Elemental sodium is highly reactive towards the atmosphere and produces fire with a blasting
sound. Although the availability of elemental sodium is very less because of its maximum
occurrence in the form of sea salt but still there have to be measures for many of such
compounds. According to Siciliano and Khatib, (2016), the gases which occur with these
11
Illustration 4: Sub-terranean Robot

extractions cannot be controlled but human beings can be safeguarded when robotic vehicles are
employed the same function.
Automation and up-gradation have their own impact and issues when it comes to the
workers and labourers in mining industry. As mentioned before, Strong, (2016) stated that the
maximum number of workers functioning in this industry are unskilled. Their knowledge and
experience is completely oriented towards manual handling. If industries bring in robots and
remotely operated vehicle then these labourers have to loose their jobs. As per the views of
Gandhi and Armstrong, (2016), training and development programs in these fields can only be
deployed if the concerned company or organisation aims to keep or retain the individuals for
future work in the company. In case of unskilled labour the probability of getting layed off from
the organisation is very high. The reason behind this principle aspect is that companies aim to
function to achieve maximum profits and reduce their production and operation costs at any
possible strategy (Shukla and Karki, 2016).
In the article “A Robotic System for Underground Coal Mining”, the entire mining
process for coal mining has been devised with reference to the robotic systems. All these
evaluations and findings have depicted that with use of robots in the working of industries, there
is a great threat to the unskilled labour. According to (Boillot, Dhoutaut and Bourgeois, 2014),
the requirements of human operator are reduced when it comes to automation. The entire
functioning shall go on 24*7 which automatically states maximum profits are under control of
the concerned organisation. Hence, the robotic systems are great boon for the mining industry
when it comes to healthcare and safeguarding of employees. On the contrary, it itself is posing a
great threat to the individuals that are working because of the lack of skills, knowledge and
requirement to handle machines and robots which are automated (Raskin, 2015).
CONCLUSION
Every time when robots and automated technology is considered or debated upon, the
first thought that comes to mind is the production line or the manufacturing units. When
considering application of this advanced technology in the mining industry, it can be inferred
that the loss of life due to mining accidents and unplanned mining activities are significantly
reduced. Furthermore, it is stated that the underground mining expeditions and sea-floor mining
activities are heavily facilitated through the use of remotely operated vehicles and robots. The
12
employed the same function.
Automation and up-gradation have their own impact and issues when it comes to the
workers and labourers in mining industry. As mentioned before, Strong, (2016) stated that the
maximum number of workers functioning in this industry are unskilled. Their knowledge and
experience is completely oriented towards manual handling. If industries bring in robots and
remotely operated vehicle then these labourers have to loose their jobs. As per the views of
Gandhi and Armstrong, (2016), training and development programs in these fields can only be
deployed if the concerned company or organisation aims to keep or retain the individuals for
future work in the company. In case of unskilled labour the probability of getting layed off from
the organisation is very high. The reason behind this principle aspect is that companies aim to
function to achieve maximum profits and reduce their production and operation costs at any
possible strategy (Shukla and Karki, 2016).
In the article “A Robotic System for Underground Coal Mining”, the entire mining
process for coal mining has been devised with reference to the robotic systems. All these
evaluations and findings have depicted that with use of robots in the working of industries, there
is a great threat to the unskilled labour. According to (Boillot, Dhoutaut and Bourgeois, 2014),
the requirements of human operator are reduced when it comes to automation. The entire
functioning shall go on 24*7 which automatically states maximum profits are under control of
the concerned organisation. Hence, the robotic systems are great boon for the mining industry
when it comes to healthcare and safeguarding of employees. On the contrary, it itself is posing a
great threat to the individuals that are working because of the lack of skills, knowledge and
requirement to handle machines and robots which are automated (Raskin, 2015).
CONCLUSION
Every time when robots and automated technology is considered or debated upon, the
first thought that comes to mind is the production line or the manufacturing units. When
considering application of this advanced technology in the mining industry, it can be inferred
that the loss of life due to mining accidents and unplanned mining activities are significantly
reduced. Furthermore, it is stated that the underground mining expeditions and sea-floor mining
activities are heavily facilitated through the use of remotely operated vehicles and robots. The
12
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
1 out of 15
Related Documents






Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.