Safe-Driving Practice Simulator
VerifiedAdded on 2023/06/15
|14
|973
|476
AI Summary
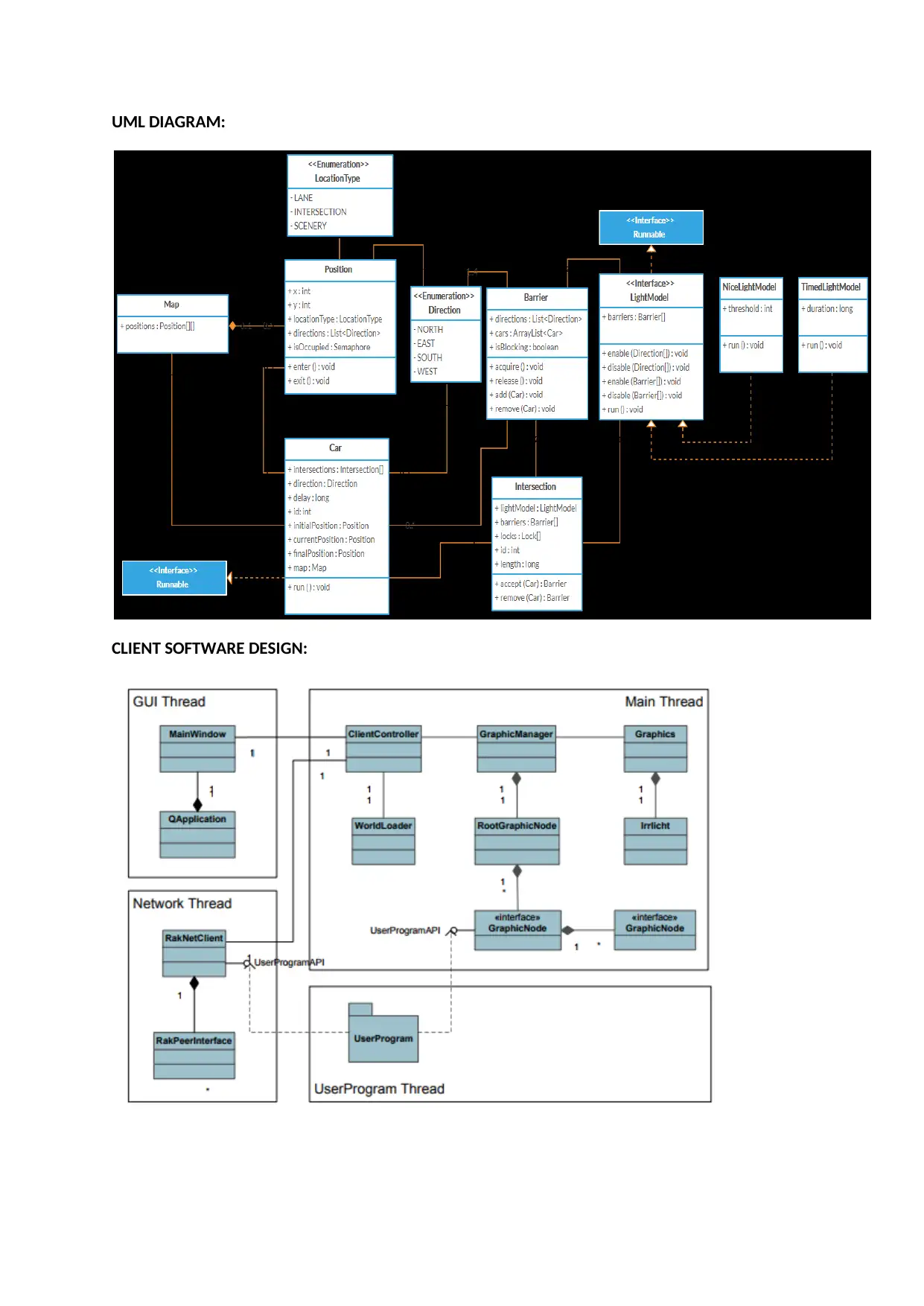
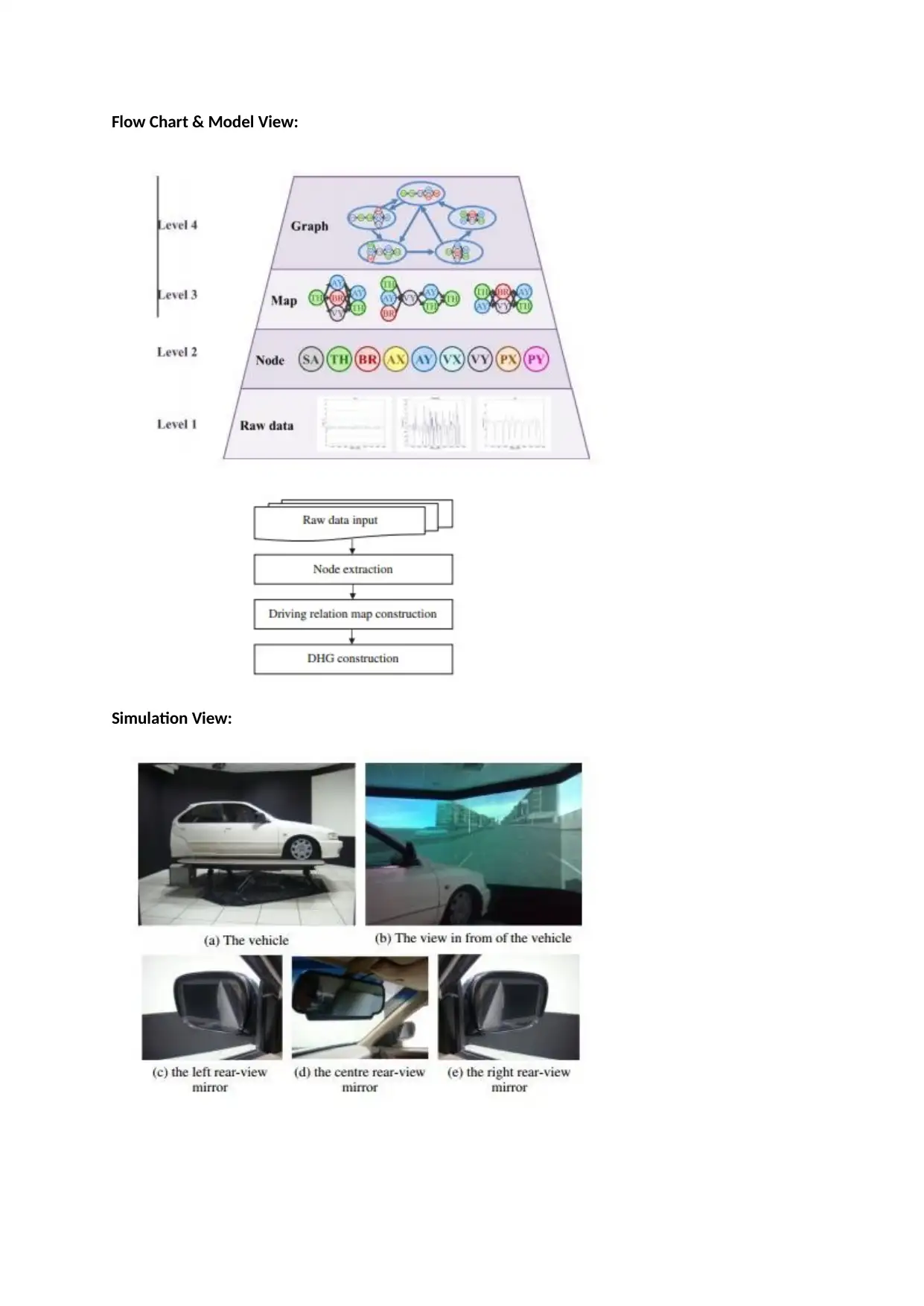
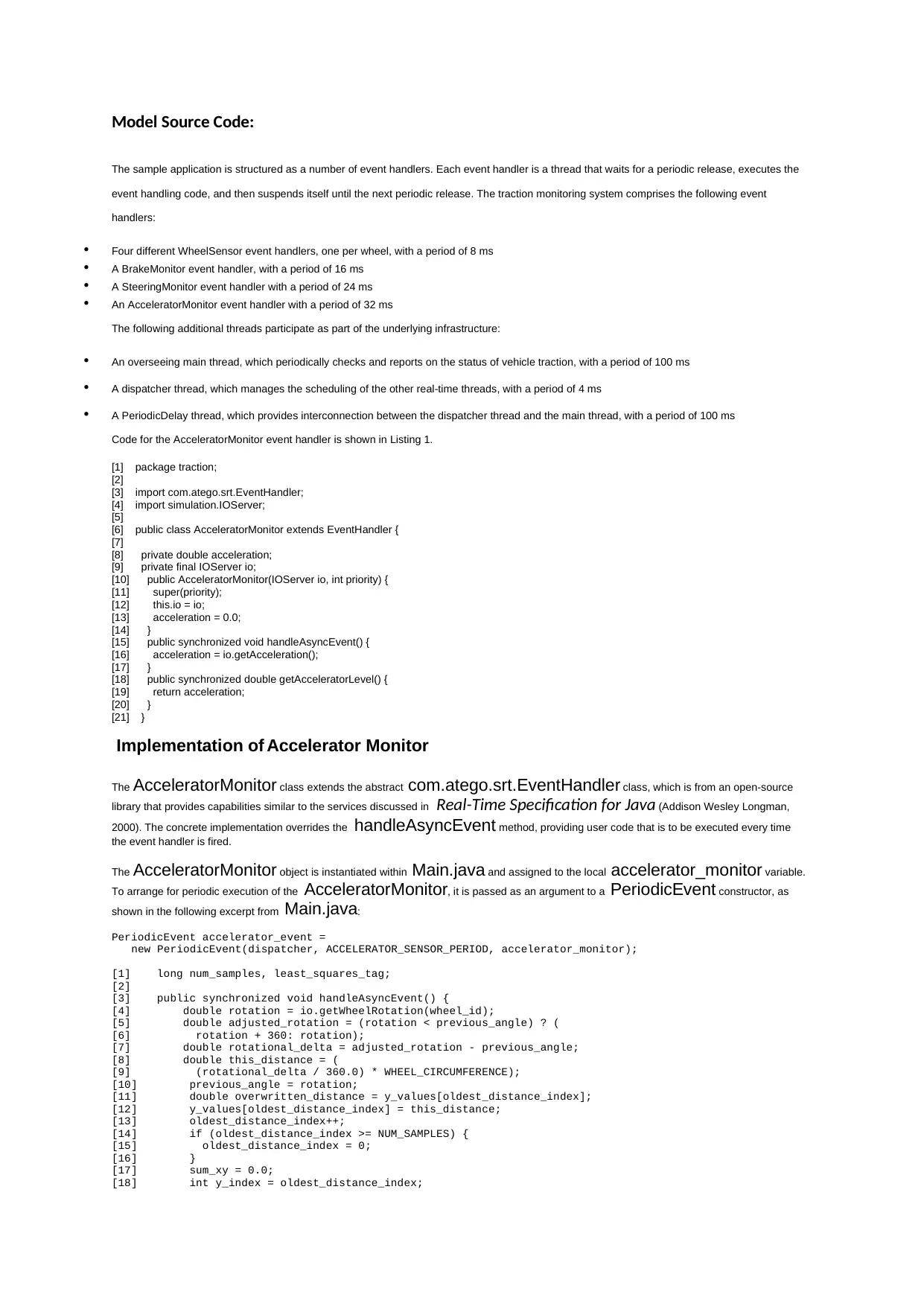
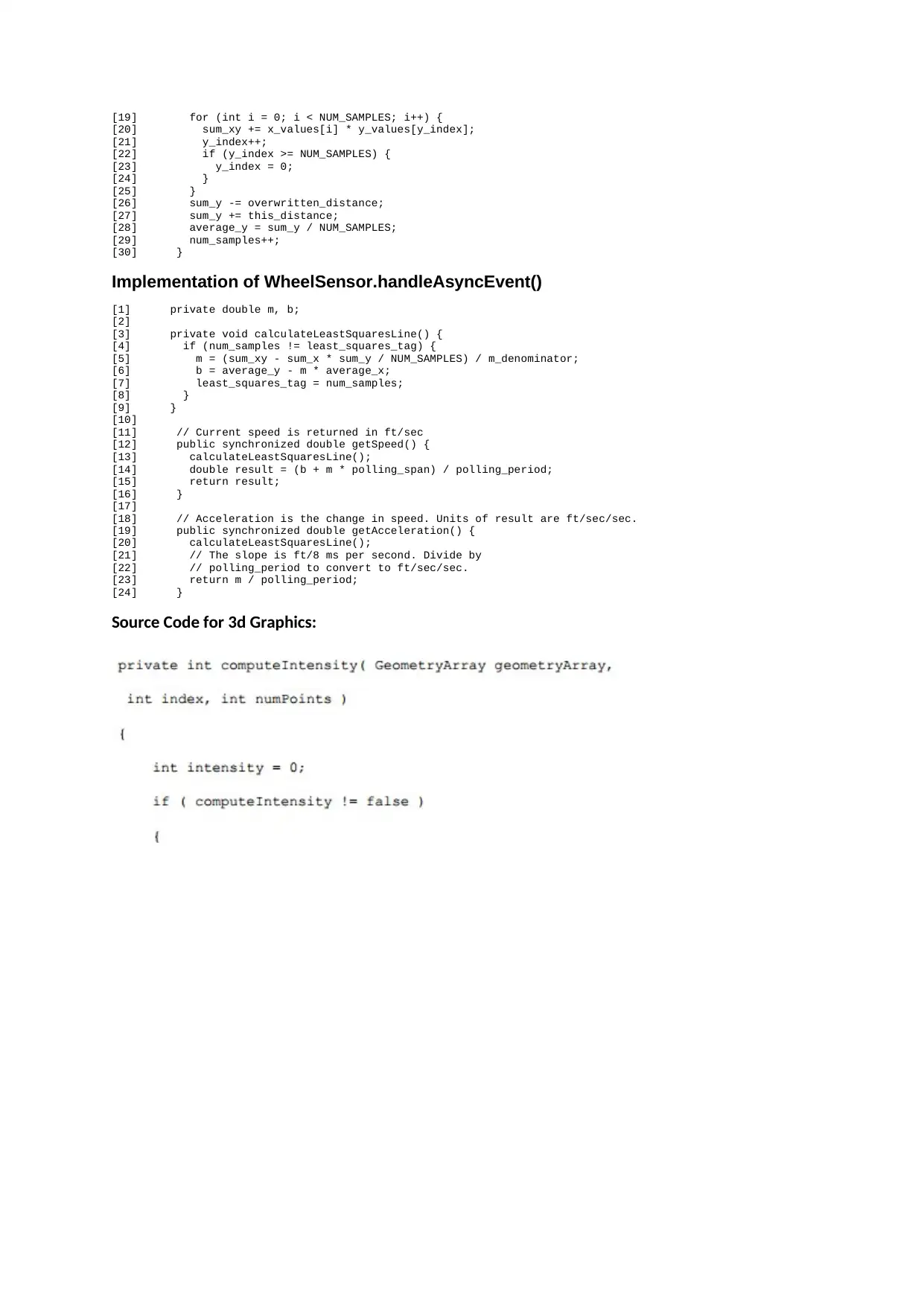
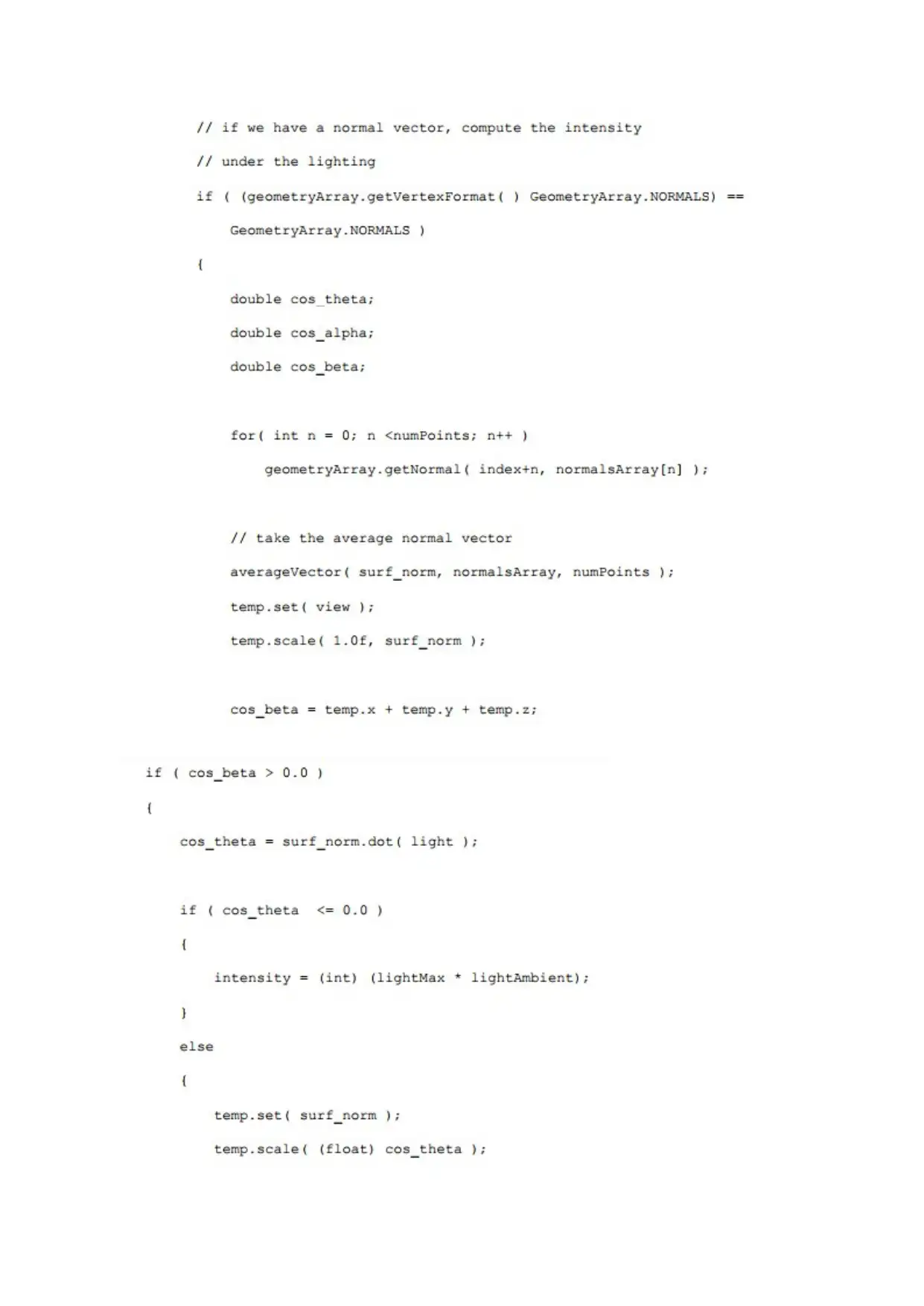
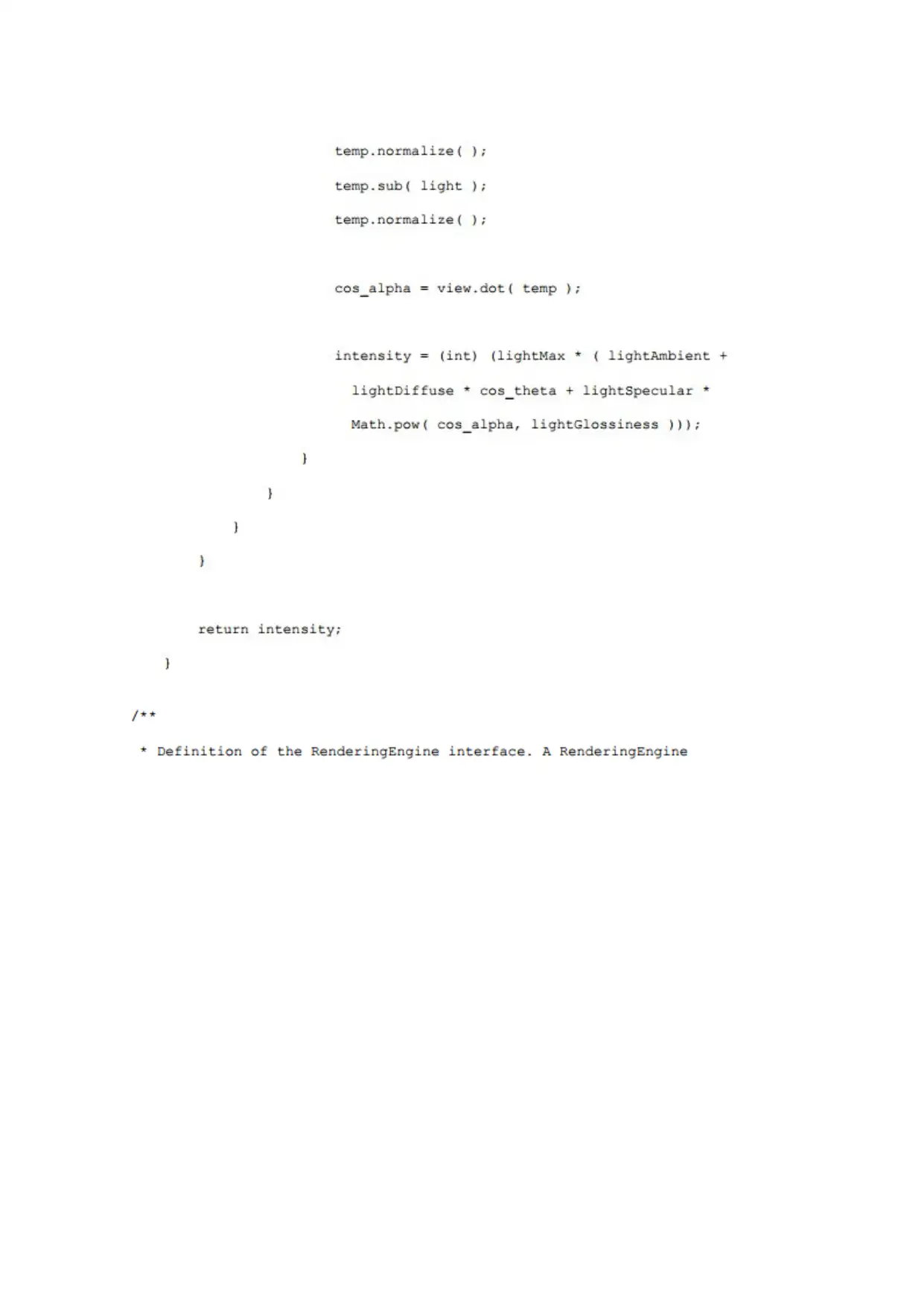
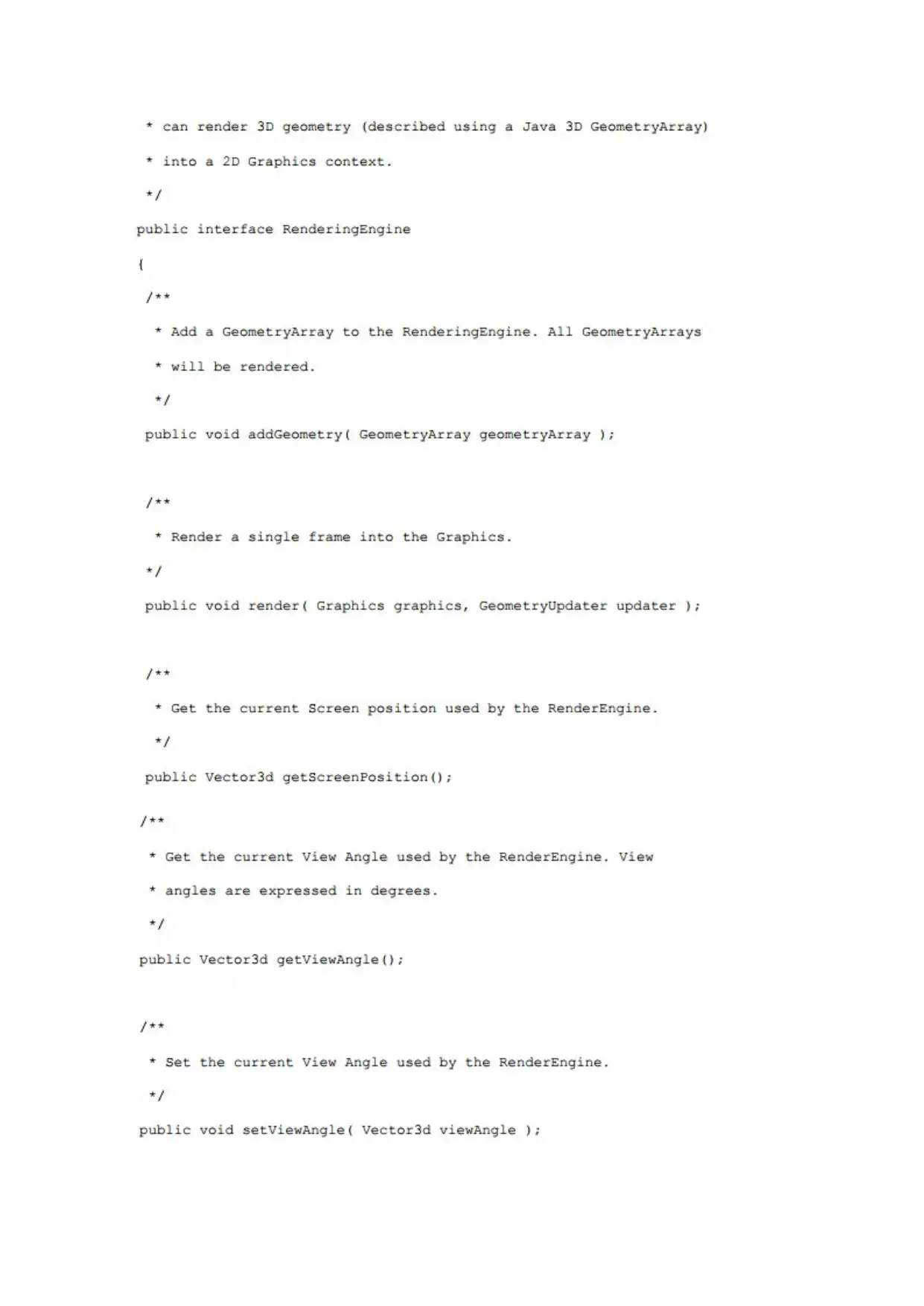
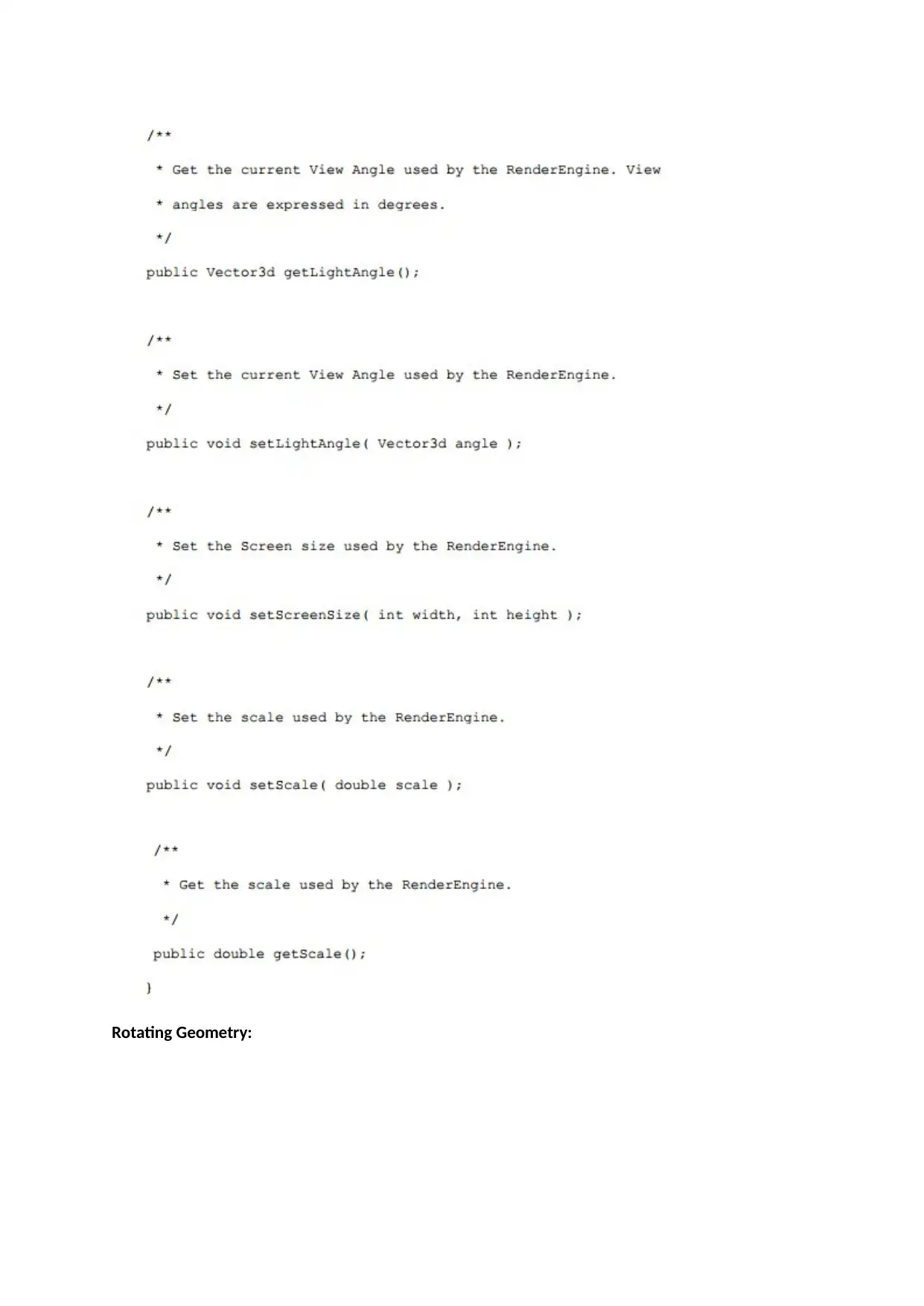
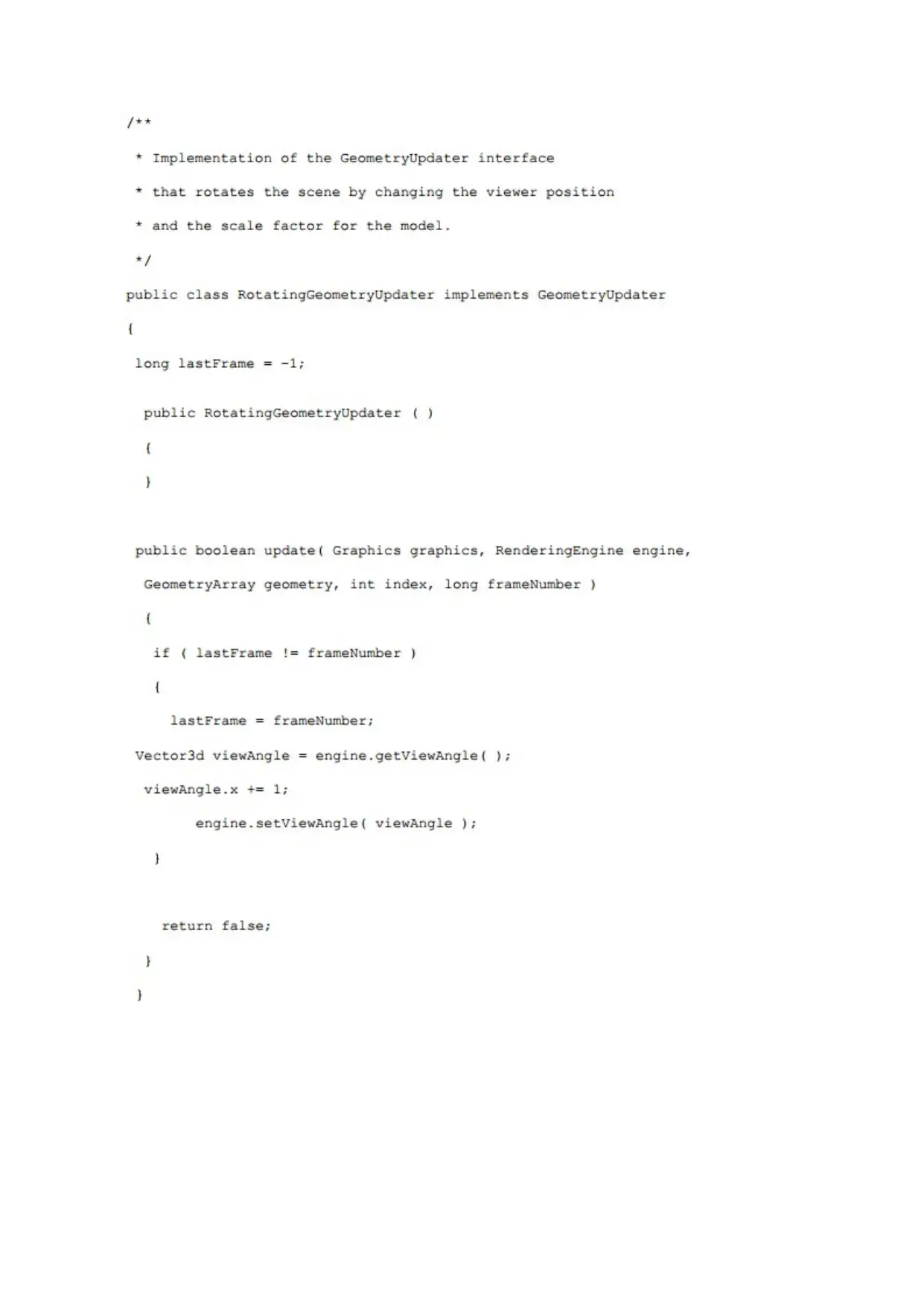
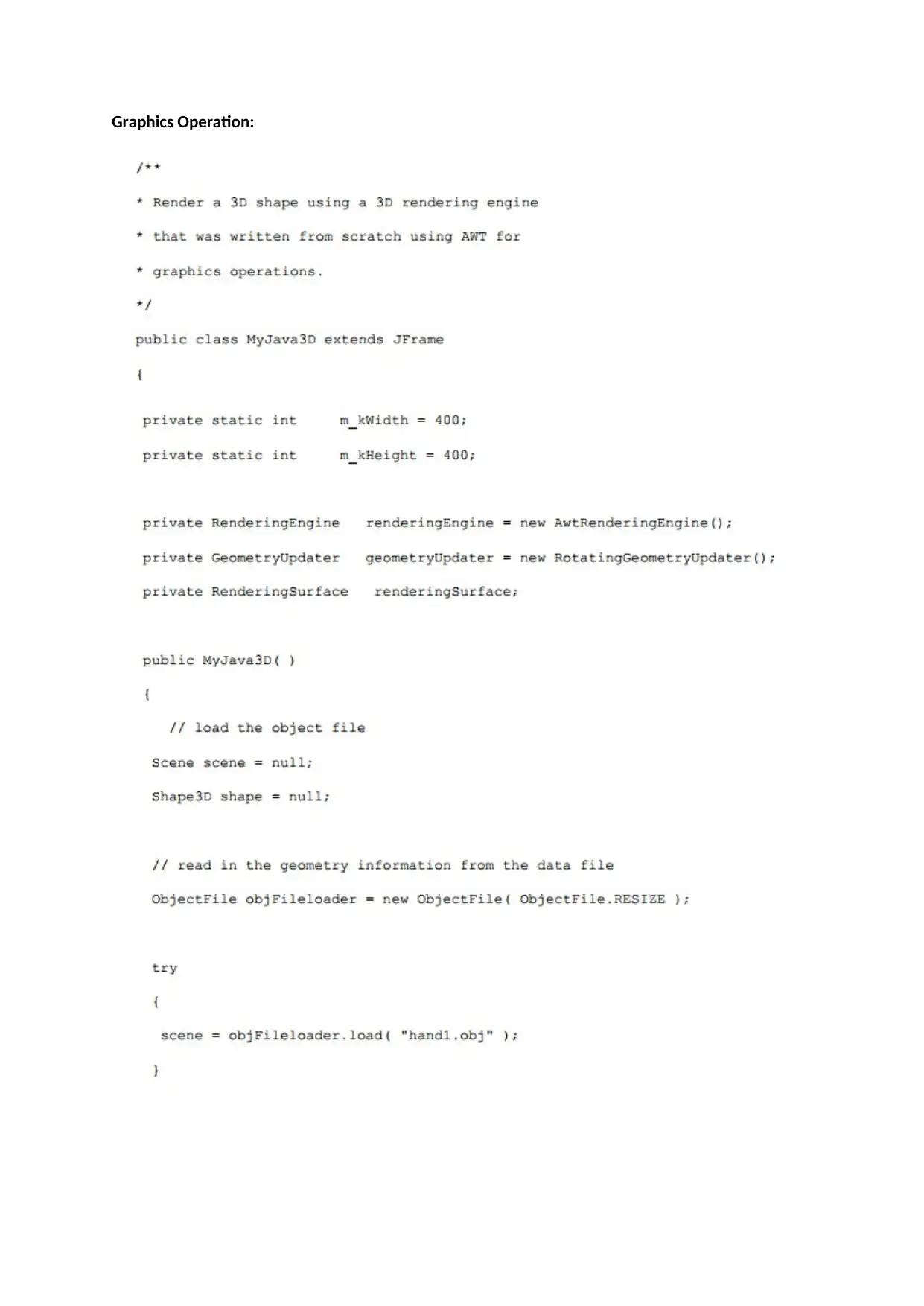
Desklib offers a Safe-Driving Practice Simulator for students to experience safe-driving. The simulator includes a racing board, UML diagram, flow chart, model view, and source code for the AcceleratorMonitor event handler. The simulator also includes 3D graphics for rotating geometry and graphics operation.
Contribute Materials
Your contribution can guide someone’s learning journey. Share your
documents today.
1 out of 14
Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
© 2024 | Zucol Services PVT LTD | All rights reserved.