Sensors Article: Lead-Wire-Resistance Compensation for RTDs
VerifiedAdded on 2021/07/13
|11
|8675
|207
Report
AI Summary
This report introduces a novel lead-wire-resistance compensation technique designed for two-wire resistance temperature detectors (RTDs) in remote measurement systems. The method employs a zener diode in parallel with the RTD and a specially designed interface circuit to accurately measure and compensate for lead-wire resistance. Through simulation and practical testing, the technique demonstrates the ability to maintain a sensor resistance measurement error within ±1 Ω and a temperature measurement error within ±0.3°C for RTDs performing 1000 Ω at 0°C, even with lead wire resistances up to 50 Ω. The report details the principle of operation, which involves measuring the lead wire resistance by utilizing the constant voltage characteristic of the zener diode during reverse breakdown. This technique is advantageous due to its simplicity, requiring only one zener diode, and its ability to detect lead wire failures. The article also discusses the materials and methods used, including a circuit schematic, and compares the proposed method to existing techniques, highlighting its effectiveness in compensating for measurement errors and its potential for real-time lead wire resistance monitoring.
sensors
Article
Lead-Wire-Resistance Compensation Technique
Using a Single Zener Diode for Two-Wire Resistance
Temperature Detectors (RTDs)
Wei Li1, Shusheng Xiong2,* and Xiaojun Zhou1
1 School of Mechanical Engineering, Zhejiang University, Hangzhou 310027, China;
11725081@zju.edu.cn (W.L.); me_zhouxj@zju.edu.cn (X.Z.)
2 College of Energy Engineering, Zhejiang University, Hangzhou 310027, China
* Correspondence:xiongss@zju.edu.cn
Received:13 April 2020; Accepted:9 May 2020; Published:11 May 2020
Abstract:In remote measurement systems,the lead wire resistance of the resistance sensor will
produce a large measurement error.In order to ensure the accuracy of remote measurement, a novel
lead-wire-resistance compensation technique is proposed, which is suitable for a two-wire resistance
temperature detector.By connecting a zener diode in parallel with the resistance temperature
detector (RTD) and an interface circuit specially designed for it, the lead-wire-resistance value can
be accurately measured by virtue of the constant voltage characteristic of the zener diode when
reverse breakdown occurs, and compensation can thereby be made when calculating the resistance
of RTD. Through simulation verification and practical circuit testing, when the sensor resistance is
in 848–2120Ω scope and the lead wire resistance is less than 50Ω , the proposed technology can
ensure the measuring error of the sensor resistance within±1 Ω and the temperature measurement
error within±0.3◦ C for RTDs performing 1000Ω at 0◦ C. Therefore, this method is able to accurately
compensate the measurement error caused by the lead wire resistance in two-wire RTDsand is suitable
for most applications.
Keywords:RTD; zener diode; temperature measurement; lead wire
1.Introduction
High-precision temperature measurement provides basic data for product development and
industrial automation applications to improve product quality and ensure production safety.Due to
its excellent linearity, measurement repeatability and stability [1], a resistance temperature detector
(RTD) is widely used therein.However, for remote measurements, the electrical resistances of long
connecting lead wires between the RTD and the control room instrument produce an appreciable error
in measurement.This unwanted error varies not only with the length of the lead wires but also with
ambient temperature variations where the lead wires layout [2]. Therefore, methods to reduce or
eliminate measurement errors caused by lead wire resistance have been studied in many literatures.
Currently,the aforementioned problem is addressed by adding lead wires.For example,
in Reference [3,4] three-wire and four-wire techniques were used separately.However,the cost
of one additional lead wire in a three-wire RTD and of two additional lead wires in a four-wire RTD will
be extremely high and with extra difficulty of wiring, especially in industries where a large number of
process points are to be monitored from a control room located at a remote place [5], such as chemical,
thermal power, electric plant and other industries.In the bridge-based measuring system, lead wire
resistance also exerts an adverse effect on measurements.Authors in Reference [6,7] presented a
method to eliminate lead wire resistance for quarter- and half-bridge interface circuit respectively,
Sensors 2020, 20, 2742; doi:10.3390/s20092742 www.mdpi.com/journal/sensors
Article
Lead-Wire-Resistance Compensation Technique
Using a Single Zener Diode for Two-Wire Resistance
Temperature Detectors (RTDs)
Wei Li1, Shusheng Xiong2,* and Xiaojun Zhou1
1 School of Mechanical Engineering, Zhejiang University, Hangzhou 310027, China;
11725081@zju.edu.cn (W.L.); me_zhouxj@zju.edu.cn (X.Z.)
2 College of Energy Engineering, Zhejiang University, Hangzhou 310027, China
* Correspondence:xiongss@zju.edu.cn
Received:13 April 2020; Accepted:9 May 2020; Published:11 May 2020
Abstract:In remote measurement systems,the lead wire resistance of the resistance sensor will
produce a large measurement error.In order to ensure the accuracy of remote measurement, a novel
lead-wire-resistance compensation technique is proposed, which is suitable for a two-wire resistance
temperature detector.By connecting a zener diode in parallel with the resistance temperature
detector (RTD) and an interface circuit specially designed for it, the lead-wire-resistance value can
be accurately measured by virtue of the constant voltage characteristic of the zener diode when
reverse breakdown occurs, and compensation can thereby be made when calculating the resistance
of RTD. Through simulation verification and practical circuit testing, when the sensor resistance is
in 848–2120Ω scope and the lead wire resistance is less than 50Ω , the proposed technology can
ensure the measuring error of the sensor resistance within±1 Ω and the temperature measurement
error within±0.3◦ C for RTDs performing 1000Ω at 0◦ C. Therefore, this method is able to accurately
compensate the measurement error caused by the lead wire resistance in two-wire RTDsand is suitable
for most applications.
Keywords:RTD; zener diode; temperature measurement; lead wire
1.Introduction
High-precision temperature measurement provides basic data for product development and
industrial automation applications to improve product quality and ensure production safety.Due to
its excellent linearity, measurement repeatability and stability [1], a resistance temperature detector
(RTD) is widely used therein.However, for remote measurements, the electrical resistances of long
connecting lead wires between the RTD and the control room instrument produce an appreciable error
in measurement.This unwanted error varies not only with the length of the lead wires but also with
ambient temperature variations where the lead wires layout [2]. Therefore, methods to reduce or
eliminate measurement errors caused by lead wire resistance have been studied in many literatures.
Currently,the aforementioned problem is addressed by adding lead wires.For example,
in Reference [3,4] three-wire and four-wire techniques were used separately.However,the cost
of one additional lead wire in a three-wire RTD and of two additional lead wires in a four-wire RTD will
be extremely high and with extra difficulty of wiring, especially in industries where a large number of
process points are to be monitored from a control room located at a remote place [5], such as chemical,
thermal power, electric plant and other industries.In the bridge-based measuring system, lead wire
resistance also exerts an adverse effect on measurements.Authors in Reference [6,7] presented a
method to eliminate lead wire resistance for quarter- and half-bridge interface circuit respectively,
Sensors 2020, 20, 2742; doi:10.3390/s20092742 www.mdpi.com/journal/sensors
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
Sensors 2020, 20, 2742 2 of 11
which employed several operational amplifiers (OPAMPs) and made use of their high input impedance.
This method was able to eliminate the unfavorable effect on the measurement caused by lead wires,
but it cannot obtain the specific lead-wire-resistance values, in addition, its interface circuits and power
circuits were complicated due to the OPAMPs.Similar methods using OPAMPs were also published
in Reference [8–10]. All of these bridge-based interface circuits used a three- or four-wire method,
except for Reference [6].
Therefore, researches have been carried out on the compensation method of two-wire sensors.
In Reference [11], a compensation resistor is selected having the same value and of the same material
of the lead resistances combined with three operational amplifiers and a constant current source to
compensate the lead wires error.Although the circuit of this method is simple, the compensation
resistance must be adjusted manually if the lead wire length is changed due to reconstruction.
In addition, the compensation effect due to temperature drift of the lead wire resistance remains to be
validated.The authors of [5] proposed a novel lead-wire-resistance compensation technique using a
two-wire RTD. This technique employed two diodes, one of which was in series with the RTD and
the other was in parallel with the series circuit composed of the RTD and the first diode.A current
source, four analogy switches and four sample-holding circuit were used in its interface circuit, and an
operational amplifier is used to output the voltage with respect to the RTD resistance.In principle,
this technique completely eliminated the measurement error caused by the lead wire resistance and its
temperature drift, but its measurement accuracy depended on the consistency of the forward voltage
drop of the two diodes.Therefore, in order to achieve a high precision measurement, it is indispensable
to measure and pair the diodes in advance.Besides, this technique cannot obtain the true value of
the lead wire resistance.This method was also seen in other references, and some improvements
had been made in the interface circuit.In the Reference [12], three single-pole double-throw (SPDT)
analog switches are used to realize the lead-wire-resistance compensation, which was independent
of the voltage reference.The authors of [13,14] used a voltage-to-current converter to provide the
current and reduced the number of SPDT analog switches to two.A Chinese patent invented a
method that employed the transient characteristics of resistor–capacitor (RC) circuit to measure the
lead wire resistance and compensate measurement error of the thermal resistance.In this method,
the measurement precision is not affected by the characteristics of the additional capacitor, and the
lead-wire-resistance value could be obtained in real time, which avoided the negative influence of the
temperature drift of the lead wire resistance.According to the patent, the update rate is less than 5 Hz,
and it is not suitable for the applications where temperature changes need to be tested dynamically.
In References [15,16], the interface circuits for four-wire resistive sensor were designed by the similar
method of multiple charge and discharge to a capacitor,and the update rate reported was 25 Hz.
The authors in References [17,18] combined the method for two-wire sensors reported in Reference [5]
and also proposed the method using a capacitor, and the their minimum complete measurement cycle
required 5.3 ms.These methods have the same problem of limited update rate.
The aim of this paper is to solve the problem of lead-wire-resistance compensation for two-wire
RTDs based on as simple interface circuit as possible, on the premises that the measurement accuracy
and the update rate are acceptable.So that, a new technique for compensating the lead-wire-resistance
measurement error of two-wire RTD is proposed,which can also resist the negative influence of
the temperature drift of the lead wire resistance on the compensation circuit.This technique only
adds one zener diode on the sensor side,and the lead wire resistance and RTD resistance can be
accurately measured through time sharing based on the stability of the reverse breakdown voltage
and the minuteness of reverse leakage current.A simple implementation and its validation of the
interface circuit will be described later in this paper, which only requires one SPDT analog switch and
a pair of reference power sources, and OPAMPs are not required.Compared to the current methods,
the proposed technique not only uses fewer components, only one zener diode, for two-wire RTDs,
but also can detect and diagnose the failures of the lead wires by measuring the lead wire resistance in
real time.
which employed several operational amplifiers (OPAMPs) and made use of their high input impedance.
This method was able to eliminate the unfavorable effect on the measurement caused by lead wires,
but it cannot obtain the specific lead-wire-resistance values, in addition, its interface circuits and power
circuits were complicated due to the OPAMPs.Similar methods using OPAMPs were also published
in Reference [8–10]. All of these bridge-based interface circuits used a three- or four-wire method,
except for Reference [6].
Therefore, researches have been carried out on the compensation method of two-wire sensors.
In Reference [11], a compensation resistor is selected having the same value and of the same material
of the lead resistances combined with three operational amplifiers and a constant current source to
compensate the lead wires error.Although the circuit of this method is simple, the compensation
resistance must be adjusted manually if the lead wire length is changed due to reconstruction.
In addition, the compensation effect due to temperature drift of the lead wire resistance remains to be
validated.The authors of [5] proposed a novel lead-wire-resistance compensation technique using a
two-wire RTD. This technique employed two diodes, one of which was in series with the RTD and
the other was in parallel with the series circuit composed of the RTD and the first diode.A current
source, four analogy switches and four sample-holding circuit were used in its interface circuit, and an
operational amplifier is used to output the voltage with respect to the RTD resistance.In principle,
this technique completely eliminated the measurement error caused by the lead wire resistance and its
temperature drift, but its measurement accuracy depended on the consistency of the forward voltage
drop of the two diodes.Therefore, in order to achieve a high precision measurement, it is indispensable
to measure and pair the diodes in advance.Besides, this technique cannot obtain the true value of
the lead wire resistance.This method was also seen in other references, and some improvements
had been made in the interface circuit.In the Reference [12], three single-pole double-throw (SPDT)
analog switches are used to realize the lead-wire-resistance compensation, which was independent
of the voltage reference.The authors of [13,14] used a voltage-to-current converter to provide the
current and reduced the number of SPDT analog switches to two.A Chinese patent invented a
method that employed the transient characteristics of resistor–capacitor (RC) circuit to measure the
lead wire resistance and compensate measurement error of the thermal resistance.In this method,
the measurement precision is not affected by the characteristics of the additional capacitor, and the
lead-wire-resistance value could be obtained in real time, which avoided the negative influence of the
temperature drift of the lead wire resistance.According to the patent, the update rate is less than 5 Hz,
and it is not suitable for the applications where temperature changes need to be tested dynamically.
In References [15,16], the interface circuits for four-wire resistive sensor were designed by the similar
method of multiple charge and discharge to a capacitor,and the update rate reported was 25 Hz.
The authors in References [17,18] combined the method for two-wire sensors reported in Reference [5]
and also proposed the method using a capacitor, and the their minimum complete measurement cycle
required 5.3 ms.These methods have the same problem of limited update rate.
The aim of this paper is to solve the problem of lead-wire-resistance compensation for two-wire
RTDs based on as simple interface circuit as possible, on the premises that the measurement accuracy
and the update rate are acceptable.So that, a new technique for compensating the lead-wire-resistance
measurement error of two-wire RTD is proposed,which can also resist the negative influence of
the temperature drift of the lead wire resistance on the compensation circuit.This technique only
adds one zener diode on the sensor side,and the lead wire resistance and RTD resistance can be
accurately measured through time sharing based on the stability of the reverse breakdown voltage
and the minuteness of reverse leakage current.A simple implementation and its validation of the
interface circuit will be described later in this paper, which only requires one SPDT analog switch and
a pair of reference power sources, and OPAMPs are not required.Compared to the current methods,
the proposed technique not only uses fewer components, only one zener diode, for two-wire RTDs,
but also can detect and diagnose the failures of the lead wires by measuring the lead wire resistance in
real time.
Sensors 2020, 20, 2742 3 of 11
2.Materials and Methods
2.1.Principle
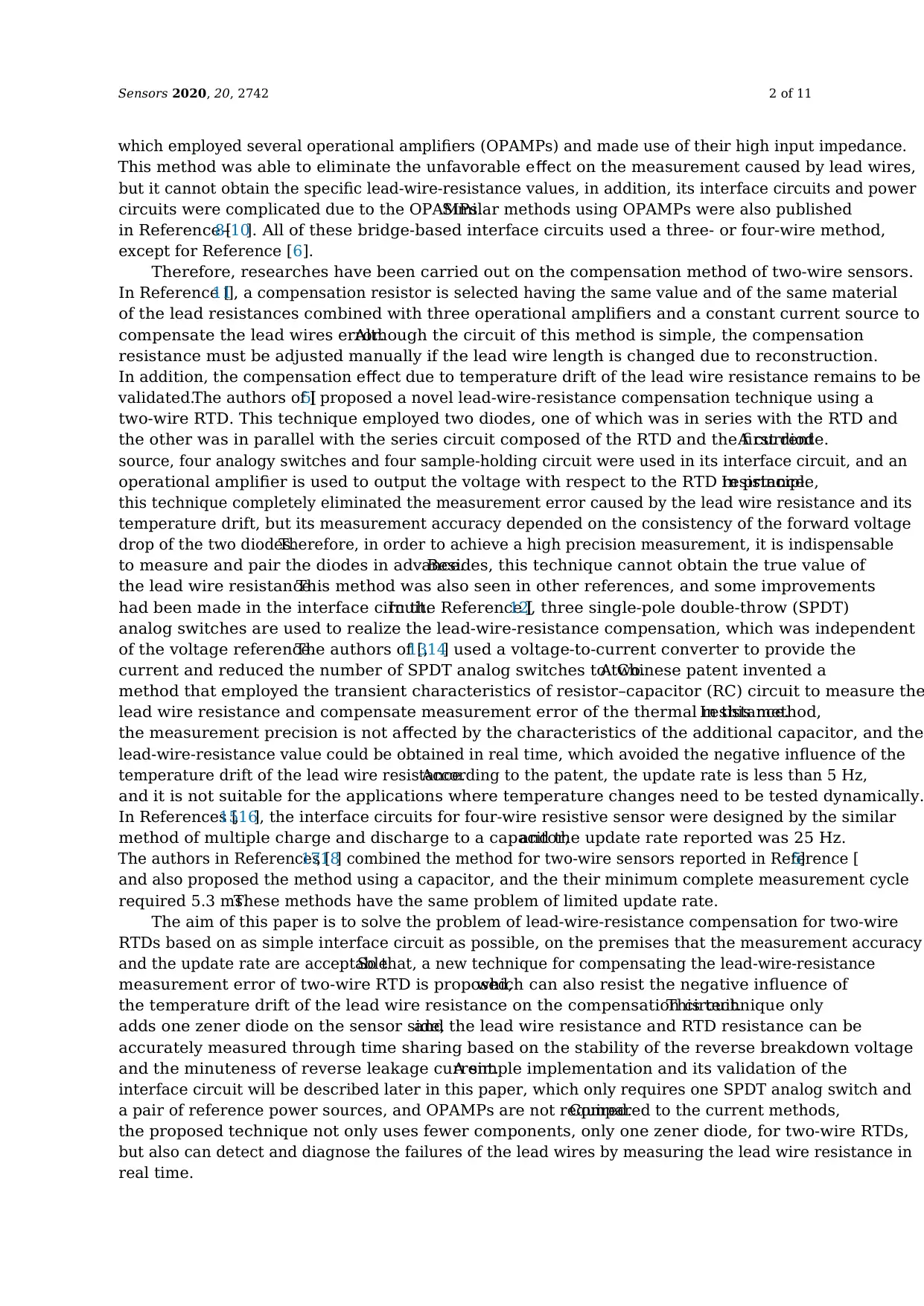
Combined with the engineering application scenarios of remote measurement, the circuit schematic
of the technique proposed in this paper is shown in Figure 1 which is composed of four regions.
Rt represents an RTD, and Region A is the region of the object to be measured.The area B where the
zener diode is located should be as close to the RTD as possible, and the ambient temperature in this are
should not change significantly due to the change of the temperature in Region A. The RTD in Region A
and zener diode in Region B are connected by two wires.As their length is very limited, the resistance
of these wires is negligible.Region C represents the layout path of the lead wires.In the remote
measurement system, the path is quite long.Its specific length depends on the practical engineering
conditions and is often changed due to engineering changes and other reasons.The resistances
Rw1 and Rw2 represent the lead wire resistance,and it is generally believed thatRw1 = Rw2 = Rw .
Region D represents the remote-control room or equipment room, where the interface circuit is located.
The other elements in Figure 1 will be described combined with the measurement procedures in the
next paragraph.
Sensors 2020, 20, x 3 of 11
2. Materials and Methods
2.1. Principle
Combined with the engineering application scenarios of remote measurement, the circuit
schematic of the technique proposed in this paper is shown in Figure 1 which is composed of four
regions. Rt represents an RTD, and Region A is the region of the object to be measured. The area B
where the zener diode is located should be as close to the RTD as possible, and the ambient
temperature in this area should not change significantly due to the change of the temperature in
Region A. The RTD in Region A and zener diode in Region B are connected by two wires. As their
length is very limited, the resistance of these wires is negligible. Region C represents the layout path
of the lead wires. In the remote measurement system, the path is quite long. Its specific leng
depends on the practical engineering conditions and is often changed due to engineering changes
and other reasons. The resistances Rw1 and Rw2 represent the lead wire resistance, and it is generally
believed that Rw1 = Rw2 = Rw. Region D represents the remote-control room or equipment room, where
the interface circuit is located. The other elements in Figure 1 will be described combined with the
measurement procedures in the next paragraph.
Figure 1. Circuit schematic for the lead-wire-resistance compensation technique.
In the proposed technique, a complete measurement procedure of RTD resistance consists of
three steps:
1. Measurement of lead wire resistance.
Switch SW in Region D of Figure 1 is switched to Position 1. Constant current source (CCS)
provides current Ic through lead wire resistors Rw1 and Rw2, giving rise to the reverse breakdown of
the zener diode and establishing a stable voltage Ud across it. Since the resistance of zener diode after
reverse breakdown is very small, most of the current goes through the diode. Although the current
flowing through Rt is relatively small, the negative influence of RTD's self-heating effect on the
temperature measurement must be considered. The voltage at Position 3 marked as U3 is measured.
Then the lead wire resistance Rw can be calculated by substituting U3 into Equation (1).
U3 = 2 Ic ∙Rw + Ud (1)
Record the values for U3 and Rw, which will be used in the following steps.
2. Measurement of working current.
SW is switched to Position 2. RTD is supplied by constant voltage source (CVS) with a voltage
of Uc, which is not more than Ud. At this time, the zener diode works in the reverse cut-off mode, and
the equivalent resistance is very large. The current passing through it marked as Id is in microamperes
range [19], whose specific value should be obtained by measurement in advance. In this step, the
voltage at Position 3 is marked as U3’, which is measured and satisfies Equation (2).
U3
' = 2 I · Rw + I - Id Rt (2)
The I in Equation (2) represents the output current of the CVS. At the same time, the voltage
measured at Position 2 is represented by U2. Thus, I can be obtained from Equation (3). Save the
values of U2 and U3’ for Step 3:
Rt
Ud
Rw1
2
3
1
SW
CCS
+
CVS
Rw2
A B C D
Uc
Ic
Rs
-
U3 U2
I
-
+
-
+
Figure 1.Circuit schematic for the lead-wire-resistance compensation technique.
In the proposed technique,a complete measurement procedure of RTD resistance consists of
three steps:
1. Measurement of lead wire resistance.
Switch SW in Region D of Figure 1 is switched to Position 1.Constant current source (CCS)
provides current Ic through lead wire resistors Rw1 and Rw2, giving rise to the reverse breakdown
of the zener diode and establishing a stable voltage Ud across it.Since the resistance of zener diode
after reverse breakdown is very small, most of the current goes through the diode.Although the
current flowing through Rt is relatively small, the negative influence of RTD’s self-heating effect on the
temperature measurement must be considered.The voltage at Position 3 marked as U3 is measured.
Then the lead wire resistance Rw can be calculated by substituting U3 into Equation (1).
U3 = 2Ic·Rw + Ud (1)
Record the values for U3 and Rw, which will be used in the following steps.
2. Measurement of working current.
SW is switched to Position 2.RTD is supplied by constant voltage source (CVS) with a voltage of
Uc, which is not more than Ud . At this time, the zener diode works in the reverse cut-off mode, and the
equivalent resistance is very large.The current passing through it marked as Id is in microamperes
range [19], whose specific value should be obtained by measurement in advance.In this step, the voltage
at Position 3 is marked as U3’, which is measured and satisfies Equation (2).
U30= 2I·Rw + (I − Id)Rt (2)
2.Materials and Methods
2.1.Principle
Combined with the engineering application scenarios of remote measurement, the circuit schematic
of the technique proposed in this paper is shown in Figure 1 which is composed of four regions.
Rt represents an RTD, and Region A is the region of the object to be measured.The area B where the
zener diode is located should be as close to the RTD as possible, and the ambient temperature in this are
should not change significantly due to the change of the temperature in Region A. The RTD in Region A
and zener diode in Region B are connected by two wires.As their length is very limited, the resistance
of these wires is negligible.Region C represents the layout path of the lead wires.In the remote
measurement system, the path is quite long.Its specific length depends on the practical engineering
conditions and is often changed due to engineering changes and other reasons.The resistances
Rw1 and Rw2 represent the lead wire resistance,and it is generally believed thatRw1 = Rw2 = Rw .
Region D represents the remote-control room or equipment room, where the interface circuit is located.
The other elements in Figure 1 will be described combined with the measurement procedures in the
next paragraph.
Sensors 2020, 20, x 3 of 11
2. Materials and Methods
2.1. Principle
Combined with the engineering application scenarios of remote measurement, the circuit
schematic of the technique proposed in this paper is shown in Figure 1 which is composed of four
regions. Rt represents an RTD, and Region A is the region of the object to be measured. The area B
where the zener diode is located should be as close to the RTD as possible, and the ambient
temperature in this area should not change significantly due to the change of the temperature in
Region A. The RTD in Region A and zener diode in Region B are connected by two wires. As their
length is very limited, the resistance of these wires is negligible. Region C represents the layout path
of the lead wires. In the remote measurement system, the path is quite long. Its specific leng
depends on the practical engineering conditions and is often changed due to engineering changes
and other reasons. The resistances Rw1 and Rw2 represent the lead wire resistance, and it is generally
believed that Rw1 = Rw2 = Rw. Region D represents the remote-control room or equipment room, where
the interface circuit is located. The other elements in Figure 1 will be described combined with the
measurement procedures in the next paragraph.
Figure 1. Circuit schematic for the lead-wire-resistance compensation technique.
In the proposed technique, a complete measurement procedure of RTD resistance consists of
three steps:
1. Measurement of lead wire resistance.
Switch SW in Region D of Figure 1 is switched to Position 1. Constant current source (CCS)
provides current Ic through lead wire resistors Rw1 and Rw2, giving rise to the reverse breakdown of
the zener diode and establishing a stable voltage Ud across it. Since the resistance of zener diode after
reverse breakdown is very small, most of the current goes through the diode. Although the current
flowing through Rt is relatively small, the negative influence of RTD's self-heating effect on the
temperature measurement must be considered. The voltage at Position 3 marked as U3 is measured.
Then the lead wire resistance Rw can be calculated by substituting U3 into Equation (1).
U3 = 2 Ic ∙Rw + Ud (1)
Record the values for U3 and Rw, which will be used in the following steps.
2. Measurement of working current.
SW is switched to Position 2. RTD is supplied by constant voltage source (CVS) with a voltage
of Uc, which is not more than Ud. At this time, the zener diode works in the reverse cut-off mode, and
the equivalent resistance is very large. The current passing through it marked as Id is in microamperes
range [19], whose specific value should be obtained by measurement in advance. In this step, the
voltage at Position 3 is marked as U3’, which is measured and satisfies Equation (2).
U3
' = 2 I · Rw + I - Id Rt (2)
The I in Equation (2) represents the output current of the CVS. At the same time, the voltage
measured at Position 2 is represented by U2. Thus, I can be obtained from Equation (3). Save the
values of U2 and U3’ for Step 3:
Rt
Ud
Rw1
2
3
1
SW
CCS
+
CVS
Rw2
A B C D
Uc
Ic
Rs
-
U3 U2
I
-
+
-
+
Figure 1.Circuit schematic for the lead-wire-resistance compensation technique.
In the proposed technique,a complete measurement procedure of RTD resistance consists of
three steps:
1. Measurement of lead wire resistance.
Switch SW in Region D of Figure 1 is switched to Position 1.Constant current source (CCS)
provides current Ic through lead wire resistors Rw1 and Rw2, giving rise to the reverse breakdown
of the zener diode and establishing a stable voltage Ud across it.Since the resistance of zener diode
after reverse breakdown is very small, most of the current goes through the diode.Although the
current flowing through Rt is relatively small, the negative influence of RTD’s self-heating effect on the
temperature measurement must be considered.The voltage at Position 3 marked as U3 is measured.
Then the lead wire resistance Rw can be calculated by substituting U3 into Equation (1).
U3 = 2Ic·Rw + Ud (1)
Record the values for U3 and Rw, which will be used in the following steps.
2. Measurement of working current.
SW is switched to Position 2.RTD is supplied by constant voltage source (CVS) with a voltage of
Uc, which is not more than Ud . At this time, the zener diode works in the reverse cut-off mode, and the
equivalent resistance is very large.The current passing through it marked as Id is in microamperes
range [19], whose specific value should be obtained by measurement in advance.In this step, the voltage
at Position 3 is marked as U3’, which is measured and satisfies Equation (2).
U30= 2I·Rw + (I − Id)Rt (2)
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
Sensors 2020, 20, 2742 4 of 11
The I in Equation (2) represents the output current of the CVS. At the same time, the voltage
measured at Position 2 is represented by U2.Thus, I can be obtained from Equation (3).Save the
values of U2 and U3’ for Step 3:
I = (Uc − U2)/R s (3)
where Rs represents a calibration resistor.
3. Calculation of RTD resistance.
By substituting Equations (1) and (3) into Equation (2), the resistance of RTD can be obtained,
as shown in Equation (4).
Rt = Ic·Rs·U30 + (UC − U2)(Ud − U3)
Ic(Uc − U2 − Id·Rs) (4)
Equation (4) shows that it is a simple algebraic equation, which can be solved in a microcontroller to
obtain RTD resistance.Then the RTD resistance can be converted to the temperature simply by look-up
table method or directly computation of the polynomial.
From Equation (4), it can be seen that the factors affecting the measurement accuracy of RTD
resistance are as follows:
• Stability of Ud and Id
• Stability of Uc and Ic
• Measurement accuracy of U2, U3 and U3’
• Accuracy and Stability of Rs
The first one is the key and most difficult factor to implementing the proposed technique.
Other factors can be met by conventional technical means, such as using high-precision analog to
digital sampling, low temperature drift power source and sampling resistance.
Compared with the I-V curve of normal diode,the I-V curve of zener diode has a narrower
breakdown voltage range and a larger curve slope.Therefore, the change of the reverse breakdown
voltage of Ud with its operating current is very small.At present, for high-precision zener diodes,
the nominal error of the reverse breakdown voltage can reach 0.05%, and the device consistency is very
high.Besides, the reverse leakage current of the zener diode can be kept relatively stable in the reverse
cutoff region.These characteristics of zener diode make it possible to calibrate the system.In order
to obtain higher measurement accuracy, it is necessary to calibrate the values of reverse breakdown
voltage and reverse leakage current of zener diode in each measurement circuit and store them in the
nonvolatile memory.
Based on this principle, the update rate depends on the response time of zener diode under the
step voltage input (200μs), the single switching time of the analog switch (18 ns), the two analog to
digital sampling times and the calculation time of the micro controller.The values in brackets above
are from the device datasheet used in the circuit prototype in Section 2.3.The conversion time of
conventional 16-bit analog to digital chips is 2μs, and the calculation time of Equation (4) for 32-bit
microcontroller with 72 MHz should not exceed 30μs. Therefore, the total time for one measurement
should be within 250 μs.In other words, the update rate in this paper can reach 4 KHz.
2.2.Simulation
The circuit modelas shown in Figure 1 was established in the circuit simulation software
Multisim 14.The model simulates the resistance changes of RTD and lead wires through adjustable
resistor.In this paper, RTD with the nominal value of 1000Ω at 0◦C was focused on, and the range form
−38.67◦ C to +299.86◦C was selected as the research range.The range of its resistance is848 Ω–2120 Ω
accordingly [20]. Providing a maximum of 50Ω of single lead wire, the distance is about 553 m when a
shielded tin-plated copper conductor with nominal cross section of 0.2 mm2 was selected, which can
The I in Equation (2) represents the output current of the CVS. At the same time, the voltage
measured at Position 2 is represented by U2.Thus, I can be obtained from Equation (3).Save the
values of U2 and U3’ for Step 3:
I = (Uc − U2)/R s (3)
where Rs represents a calibration resistor.
3. Calculation of RTD resistance.
By substituting Equations (1) and (3) into Equation (2), the resistance of RTD can be obtained,
as shown in Equation (4).
Rt = Ic·Rs·U30 + (UC − U2)(Ud − U3)
Ic(Uc − U2 − Id·Rs) (4)
Equation (4) shows that it is a simple algebraic equation, which can be solved in a microcontroller to
obtain RTD resistance.Then the RTD resistance can be converted to the temperature simply by look-up
table method or directly computation of the polynomial.
From Equation (4), it can be seen that the factors affecting the measurement accuracy of RTD
resistance are as follows:
• Stability of Ud and Id
• Stability of Uc and Ic
• Measurement accuracy of U2, U3 and U3’
• Accuracy and Stability of Rs
The first one is the key and most difficult factor to implementing the proposed technique.
Other factors can be met by conventional technical means, such as using high-precision analog to
digital sampling, low temperature drift power source and sampling resistance.
Compared with the I-V curve of normal diode,the I-V curve of zener diode has a narrower
breakdown voltage range and a larger curve slope.Therefore, the change of the reverse breakdown
voltage of Ud with its operating current is very small.At present, for high-precision zener diodes,
the nominal error of the reverse breakdown voltage can reach 0.05%, and the device consistency is very
high.Besides, the reverse leakage current of the zener diode can be kept relatively stable in the reverse
cutoff region.These characteristics of zener diode make it possible to calibrate the system.In order
to obtain higher measurement accuracy, it is necessary to calibrate the values of reverse breakdown
voltage and reverse leakage current of zener diode in each measurement circuit and store them in the
nonvolatile memory.
Based on this principle, the update rate depends on the response time of zener diode under the
step voltage input (200μs), the single switching time of the analog switch (18 ns), the two analog to
digital sampling times and the calculation time of the micro controller.The values in brackets above
are from the device datasheet used in the circuit prototype in Section 2.3.The conversion time of
conventional 16-bit analog to digital chips is 2μs, and the calculation time of Equation (4) for 32-bit
microcontroller with 72 MHz should not exceed 30μs. Therefore, the total time for one measurement
should be within 250 μs.In other words, the update rate in this paper can reach 4 KHz.
2.2.Simulation
The circuit modelas shown in Figure 1 was established in the circuit simulation software
Multisim 14.The model simulates the resistance changes of RTD and lead wires through adjustable
resistor.In this paper, RTD with the nominal value of 1000Ω at 0◦C was focused on, and the range form
−38.67◦ C to +299.86◦C was selected as the research range.The range of its resistance is848 Ω–2120 Ω
accordingly [20]. Providing a maximum of 50Ω of single lead wire, the distance is about 553 m when a
shielded tin-plated copper conductor with nominal cross section of 0.2 mm2 was selected, which can
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
Sensors 2020, 20, 2742 5 of 11
cover most practical engineering application.The parameters of the simulation model are shown in
Table 1.
Table 1.Parameters used in the simulation model.
Parameters Breakdown Voltage
of Zener Diode
Output Current
of CCS
Output Voltage
of CVS
On-State Resistance
of Analog Switch Temperature
Value 2.4 V 10.00 mA 1.250 V 0.5 Ω 27◦C
The selection of CCS current takes two factors into consideration:On one hand,in order to
reduce the self-heating effect of RTD, the working current should be as small as possible.On the other,
because the greater the CCS current is, the higher the stability of the voltage across the zener diode is
according to the simulation results, in order to ensure the measurement accuracy, the voltage should
be as stable as possible and the CCS current should be as large as possible.
According to multiple simulation results, when the CCS current was selected as 10 mA, the change
of voltage across the zener diode and the current through RTD are both appropriately small as shown
in the following paragraphs.It not only guarantees the sufficient measurement accuracy, but also
avoids the serious self-heating effect.
If different types of zener diodes are used,the stability of the voltage shall be re-measured
and converted it into measurement accuracy.Select the CCS current as small as possible within the
allowable measurement accuracy.
The specific procedures of simulation are shown in the following paragraphs.
At first, Step 1 in Section 2.1 is simulated to study the stability of Ud when the resistance of RTD
and lead wire is changing under CCS supply.The simulation results are shown in Table 2.It shows
that the voltage variation across zener diode in the research range is 0.006 V at 10mA current, which is
0.25% of its nominal value of breakdown voltage.
Table 2.Voltage across zener diode by the resistance of the resistance temperature detector (RTD) and
lead wire (in V).
Set Points of RTD
Resistance (Ω) 848.0 1060.0 1272.0 1484.0 1696.0 1908.0 2120.0
Set Points of
Lead Wire
Resistance (Ω)
0.5 2.410 2.412 2.414 2.415 2.415 2.416 2.416
5 2.410 2.412 2.414 2.415 2.415 2.416 2.416
20 2.410 2.412 2.414 2.415 2.415 2.416 2.416
50 2.410 2.412 2.414 2.415 2.415 2.416 2.416
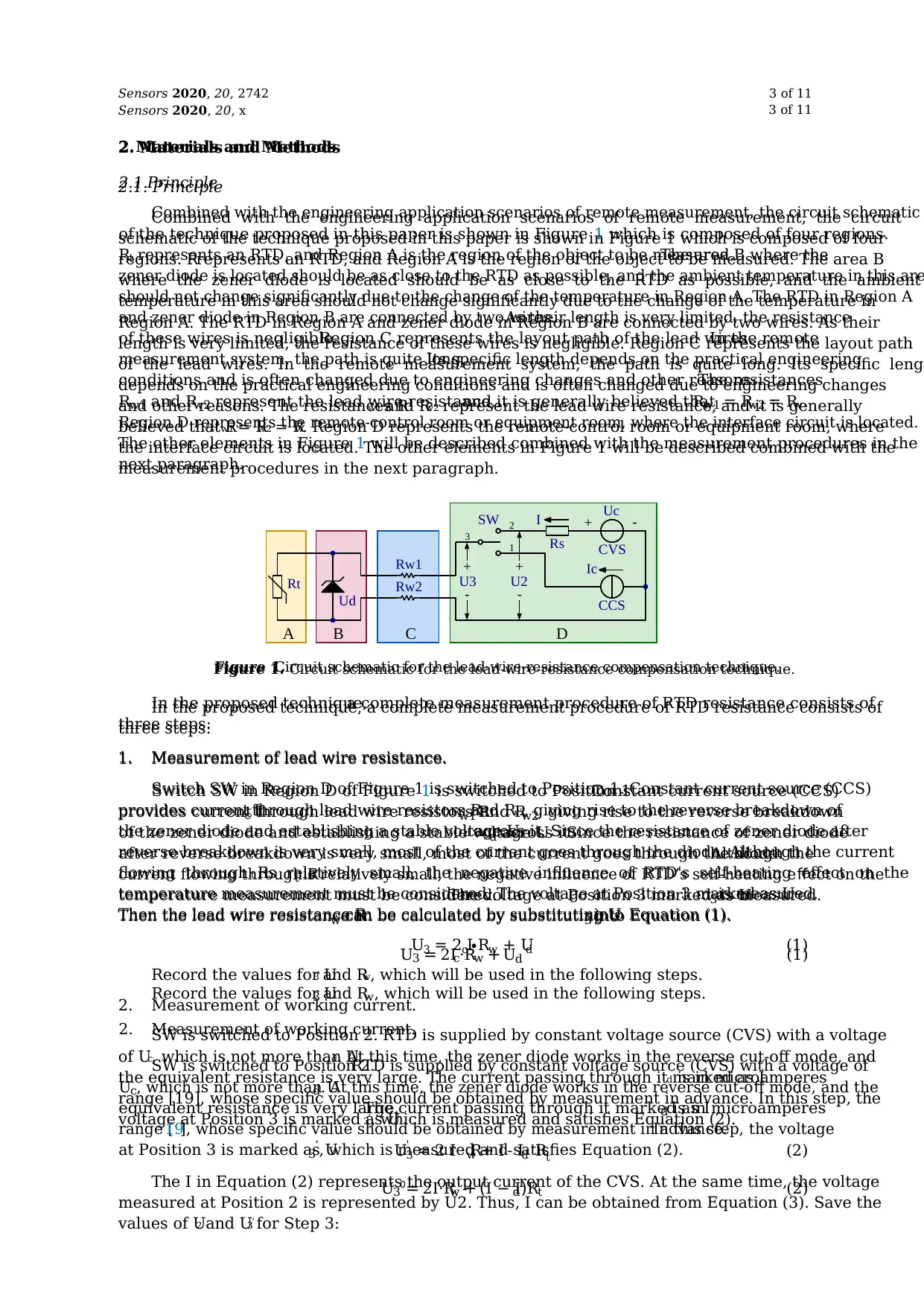
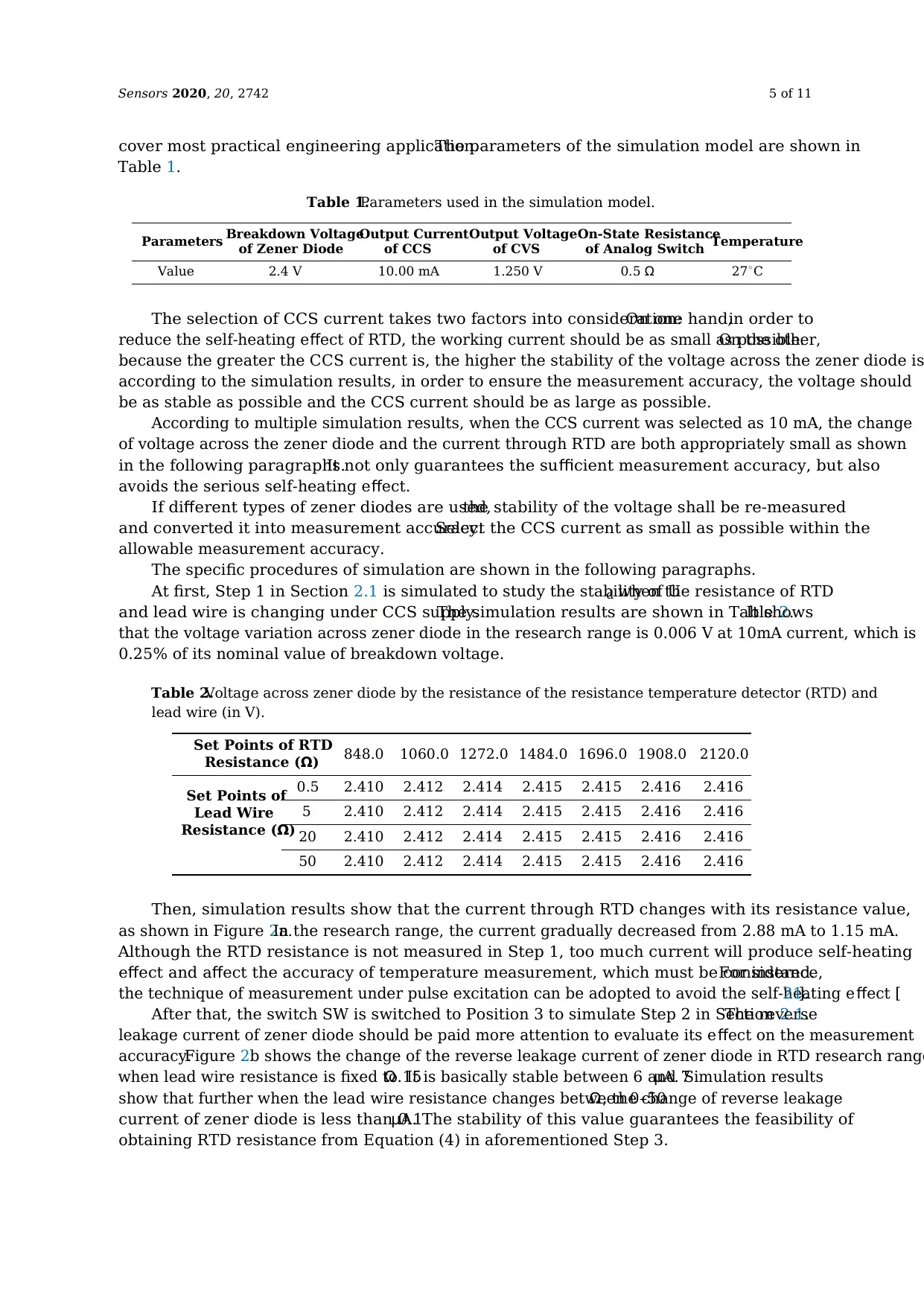
Then, simulation results show that the current through RTD changes with its resistance value,
as shown in Figure 2a.In the research range, the current gradually decreased from 2.88 mA to 1.15 mA.
Although the RTD resistance is not measured in Step 1, too much current will produce self-heating
effect and affect the accuracy of temperature measurement, which must be considered.For instance,
the technique of measurement under pulse excitation can be adopted to avoid the self-heating e ffect [21].
After that, the switch SW is switched to Position 3 to simulate Step 2 in Section 2.1.The reverse
leakage current of zener diode should be paid more attention to evaluate its effect on the measurement
accuracy.Figure 2b shows the change of the reverse leakage current of zener diode in RTD research range
when lead wire resistance is fixed to 15Ω . It is basically stable between 6 and 7μA. Simulation results
show that further when the lead wire resistance changes between 0–50Ω , the change of reverse leakage
current of zener diode is less than 0.1μA. The stability of this value guarantees the feasibility of
obtaining RTD resistance from Equation (4) in aforementioned Step 3.
cover most practical engineering application.The parameters of the simulation model are shown in
Table 1.
Table 1.Parameters used in the simulation model.
Parameters Breakdown Voltage
of Zener Diode
Output Current
of CCS
Output Voltage
of CVS
On-State Resistance
of Analog Switch Temperature
Value 2.4 V 10.00 mA 1.250 V 0.5 Ω 27◦C
The selection of CCS current takes two factors into consideration:On one hand,in order to
reduce the self-heating effect of RTD, the working current should be as small as possible.On the other,
because the greater the CCS current is, the higher the stability of the voltage across the zener diode is
according to the simulation results, in order to ensure the measurement accuracy, the voltage should
be as stable as possible and the CCS current should be as large as possible.
According to multiple simulation results, when the CCS current was selected as 10 mA, the change
of voltage across the zener diode and the current through RTD are both appropriately small as shown
in the following paragraphs.It not only guarantees the sufficient measurement accuracy, but also
avoids the serious self-heating effect.
If different types of zener diodes are used,the stability of the voltage shall be re-measured
and converted it into measurement accuracy.Select the CCS current as small as possible within the
allowable measurement accuracy.
The specific procedures of simulation are shown in the following paragraphs.
At first, Step 1 in Section 2.1 is simulated to study the stability of Ud when the resistance of RTD
and lead wire is changing under CCS supply.The simulation results are shown in Table 2.It shows
that the voltage variation across zener diode in the research range is 0.006 V at 10mA current, which is
0.25% of its nominal value of breakdown voltage.
Table 2.Voltage across zener diode by the resistance of the resistance temperature detector (RTD) and
lead wire (in V).
Set Points of RTD
Resistance (Ω) 848.0 1060.0 1272.0 1484.0 1696.0 1908.0 2120.0
Set Points of
Lead Wire
Resistance (Ω)
0.5 2.410 2.412 2.414 2.415 2.415 2.416 2.416
5 2.410 2.412 2.414 2.415 2.415 2.416 2.416
20 2.410 2.412 2.414 2.415 2.415 2.416 2.416
50 2.410 2.412 2.414 2.415 2.415 2.416 2.416
Then, simulation results show that the current through RTD changes with its resistance value,
as shown in Figure 2a.In the research range, the current gradually decreased from 2.88 mA to 1.15 mA.
Although the RTD resistance is not measured in Step 1, too much current will produce self-heating
effect and affect the accuracy of temperature measurement, which must be considered.For instance,
the technique of measurement under pulse excitation can be adopted to avoid the self-heating e ffect [21].
After that, the switch SW is switched to Position 3 to simulate Step 2 in Section 2.1.The reverse
leakage current of zener diode should be paid more attention to evaluate its effect on the measurement
accuracy.Figure 2b shows the change of the reverse leakage current of zener diode in RTD research range
when lead wire resistance is fixed to 15Ω . It is basically stable between 6 and 7μA. Simulation results
show that further when the lead wire resistance changes between 0–50Ω , the change of reverse leakage
current of zener diode is less than 0.1μA. The stability of this value guarantees the feasibility of
obtaining RTD resistance from Equation (4) in aforementioned Step 3.
Sensors 2020, 20, 2742 6 of 11
50 2.410 2.412 2.414 2.415 2.415 2.416 2.416
Then, simulation results show that the current through RTD changes with its resistance value, as
shown in Figure 2a. In the research range, the current gradually decreased from 2.88 mA to 1.15 mA.
Although the RTD resistance is not measured in Step 1, too much current will produce self-heating
effect and affect the accuracy of temperature measurement, which must be considered. For instance, th
technique of measurement under pulse excitation can be adopted to avoid the self-heating effect [21].
(a) (b)
Figure 2. (a) Current through RTD changes over its resistance under CCS supply; ( b) current through
zener diode changes over the resistance of RTD under CCS supply.
0
0.5
1
1.5
2
2.5
3
800 1000 1200 1400 1600 1800 2000 2200
RTD Current, mA
RTD Resistance, Ω
0
2
4
6
8
10
800 1000 1200 1400 1600 1800 2000 2200
Zener Diode Current, uA
RTD Resistance, Ω
Figure 2.(a) Current through RTD changes over its resistance under CCS supply; (b) current through
zener diode changes over the resistance of RTD under CCS supply.
In the end, RTD resistance is calculated according to Equation (4) combined with the parameters
in Table 1, where Ud is 2.413 V and Id is 6.40μA. The resistance is calculated as temperature according
to the polynomial in Reference [20], and the result is shown in Table 3.
Table3. Comparison of set points and simulation values about RTD resistance and
corresponding temperature.
Number 1 2 3 4 5 6 7 8 9 10 11 12 13
Set
Points
Resistance/Ω 848.00 954.00 1060.00 1166.00 1272.00 1378.00 1484.00 1590.00 1696.00 1802.00 1908.00 2014.00 2120.00
Temperature/◦C −38.67 −11.75 15.39 42.74 70.33 98.14 126.19 154.49 183.03 211.84 240.90 270.24 299.86
Observed Values Rw = 0.5Ω Res./Ω 849.00 955.03 1061.01 1166.99 1272.96 1378.94 1484.90 1590.87 1696.82 1802.78 1908.73 2014.69 2120.62
Temp./◦ C −38.42 −11.49 15.65 43.00 70.58 98.39 126.43 154.72 183.26 212.05 241.10 270.43 300.03
Rw = 1 Ω Res./Ω 850.04 956.03 1062.02 1168.00 1273.97 1379.95 1485.91 1591.87 1697.83 1803.79 1909.75 2015.69 2121.64
Temp./◦ C −38.15 −11.23 15.91 43.26 70.84 98.65 126.70 154.99 183.53 212.32 241.38 270.71 300.32
Rw = 5 Ω Res./Ω 848.36 954.22 1060.11 1166.01 1271.92 1377.84 1483.76 1589.68 1695.61 1801.53 1907.45 2013.39 2119.32
Temp./◦ C −38.58 −11.69 15.41 42.75 70.31 98.10 126.13 154.40 182.93 211.71 240.75 270.07 299.66
Rw = 20 Ω Res./Ω 848.39 954.25 1060.14 1166.05 1271.96 1377.87 1483.78 1589.73 1695.66 1801.58 1907.52 2013.44 2119.37
Temp./◦ C −38.57 −11.68 15.42 42.76 70.32 98.11 126.13 154.41 182.94 211.72 240.77 270.08 299.68
Rw = 50 Ω Res./Ω 848.44 954.31 1060.20 1166.11 1272.03 1377.95 1483.89 1589.82 1695.75 1801.68 1907.62 2013.56 2119.49
Temp./◦ C −38.56 −11.67 15.44 42.77 70.33 98.13 126.16 154.44 182.97 211.75 240.80 270.12 299.71
Table 3 shows the RTD resistance figured out according to Equation (4) at thirteen set points by
arithmetic sequence and five different lead wire resistances in the research range.The comparison
between the set points and the calculation values indicates that the largest error of RTD resistance is
+2.04 Ω and −0.68 Ω, the maximal error of the temperature is +0.52◦C and −0.19◦C.
The simulation results show that the technique can effectively compensate the adverse effect of
the lead wire resistance within 50Ω on the temperature measurement.Meanwhile, the accuracy of
temperature measurement reaches ±0.52◦C or 0.3% of research range.
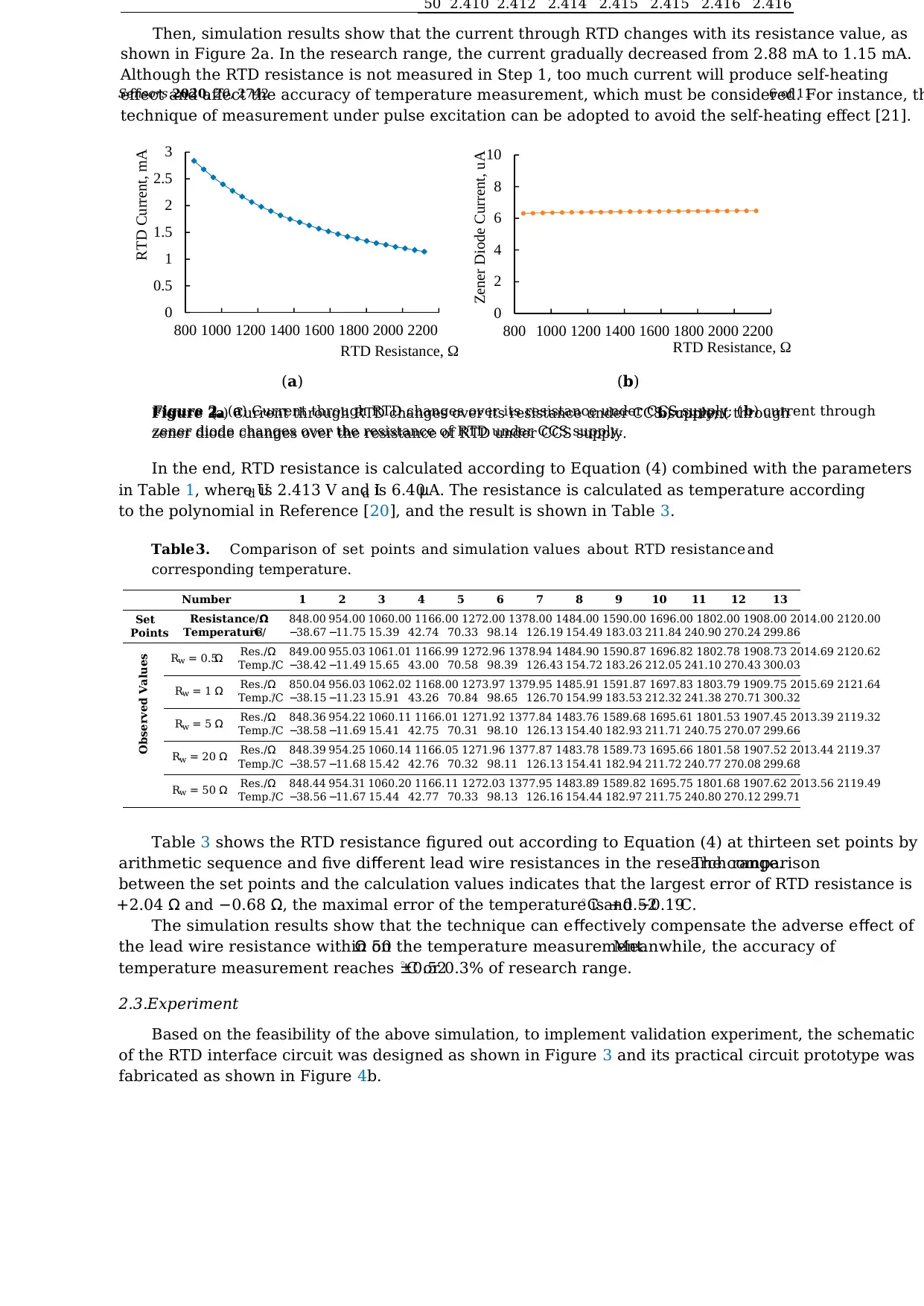
2.3.Experiment
Based on the feasibility of the above simulation, to implement validation experiment, the schematic
of the RTD interface circuit was designed as shown in Figure 3 and its practical circuit prototype was
fabricated as shown in Figure 4b.
50 2.410 2.412 2.414 2.415 2.415 2.416 2.416
Then, simulation results show that the current through RTD changes with its resistance value, as
shown in Figure 2a. In the research range, the current gradually decreased from 2.88 mA to 1.15 mA.
Although the RTD resistance is not measured in Step 1, too much current will produce self-heating
effect and affect the accuracy of temperature measurement, which must be considered. For instance, th
technique of measurement under pulse excitation can be adopted to avoid the self-heating effect [21].
(a) (b)
Figure 2. (a) Current through RTD changes over its resistance under CCS supply; ( b) current through
zener diode changes over the resistance of RTD under CCS supply.
0
0.5
1
1.5
2
2.5
3
800 1000 1200 1400 1600 1800 2000 2200
RTD Current, mA
RTD Resistance, Ω
0
2
4
6
8
10
800 1000 1200 1400 1600 1800 2000 2200
Zener Diode Current, uA
RTD Resistance, Ω
Figure 2.(a) Current through RTD changes over its resistance under CCS supply; (b) current through
zener diode changes over the resistance of RTD under CCS supply.
In the end, RTD resistance is calculated according to Equation (4) combined with the parameters
in Table 1, where Ud is 2.413 V and Id is 6.40μA. The resistance is calculated as temperature according
to the polynomial in Reference [20], and the result is shown in Table 3.
Table3. Comparison of set points and simulation values about RTD resistance and
corresponding temperature.
Number 1 2 3 4 5 6 7 8 9 10 11 12 13
Set
Points
Resistance/Ω 848.00 954.00 1060.00 1166.00 1272.00 1378.00 1484.00 1590.00 1696.00 1802.00 1908.00 2014.00 2120.00
Temperature/◦C −38.67 −11.75 15.39 42.74 70.33 98.14 126.19 154.49 183.03 211.84 240.90 270.24 299.86
Observed Values Rw = 0.5Ω Res./Ω 849.00 955.03 1061.01 1166.99 1272.96 1378.94 1484.90 1590.87 1696.82 1802.78 1908.73 2014.69 2120.62
Temp./◦ C −38.42 −11.49 15.65 43.00 70.58 98.39 126.43 154.72 183.26 212.05 241.10 270.43 300.03
Rw = 1 Ω Res./Ω 850.04 956.03 1062.02 1168.00 1273.97 1379.95 1485.91 1591.87 1697.83 1803.79 1909.75 2015.69 2121.64
Temp./◦ C −38.15 −11.23 15.91 43.26 70.84 98.65 126.70 154.99 183.53 212.32 241.38 270.71 300.32
Rw = 5 Ω Res./Ω 848.36 954.22 1060.11 1166.01 1271.92 1377.84 1483.76 1589.68 1695.61 1801.53 1907.45 2013.39 2119.32
Temp./◦ C −38.58 −11.69 15.41 42.75 70.31 98.10 126.13 154.40 182.93 211.71 240.75 270.07 299.66
Rw = 20 Ω Res./Ω 848.39 954.25 1060.14 1166.05 1271.96 1377.87 1483.78 1589.73 1695.66 1801.58 1907.52 2013.44 2119.37
Temp./◦ C −38.57 −11.68 15.42 42.76 70.32 98.11 126.13 154.41 182.94 211.72 240.77 270.08 299.68
Rw = 50 Ω Res./Ω 848.44 954.31 1060.20 1166.11 1272.03 1377.95 1483.89 1589.82 1695.75 1801.68 1907.62 2013.56 2119.49
Temp./◦ C −38.56 −11.67 15.44 42.77 70.33 98.13 126.16 154.44 182.97 211.75 240.80 270.12 299.71
Table 3 shows the RTD resistance figured out according to Equation (4) at thirteen set points by
arithmetic sequence and five different lead wire resistances in the research range.The comparison
between the set points and the calculation values indicates that the largest error of RTD resistance is
+2.04 Ω and −0.68 Ω, the maximal error of the temperature is +0.52◦C and −0.19◦C.
The simulation results show that the technique can effectively compensate the adverse effect of
the lead wire resistance within 50Ω on the temperature measurement.Meanwhile, the accuracy of
temperature measurement reaches ±0.52◦C or 0.3% of research range.
2.3.Experiment
Based on the feasibility of the above simulation, to implement validation experiment, the schematic
of the RTD interface circuit was designed as shown in Figure 3 and its practical circuit prototype was
fabricated as shown in Figure 4b.
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
Sensors 2020, 20, 2742 7 of 11
temperature measurement reaches ±0.52 °C or 0.3% of research range.
2.3. Experiment
Based on the feasibility of the above simulation, to implement validation experiment, the
schematic of the RTD interface circuit was designed as shown in Figure 3 and its practical circuit
prototype was fabricated as shown in Figure 4b.
Figure 3. Schematic of RTD interface circuit.
OUT
2
SET
1 IN 3
OUT
4
U3
LT3902
125ΩR4
IN
1
VDD 2
GND
3
S1 4
D
5 S2 6
U2
ADG719
+5
SW
IN 1
OUT
2
GND
3
U1
REF30120.1uF
C1
+5
200ΩRs
U2
0.47uF
C2
+5
0.1uF
C3
U3
D1
LT1634-1.25
D2
LT1634-1.25
RTD2
RTD1
50ΩRw1
50ΩRw2
+5V
GND
GNDGNDGND
Terminal
Figure 3.Schematic of RTD interface circuit.
Sensors 2020, 20, x 7 of 11
(a) (b)
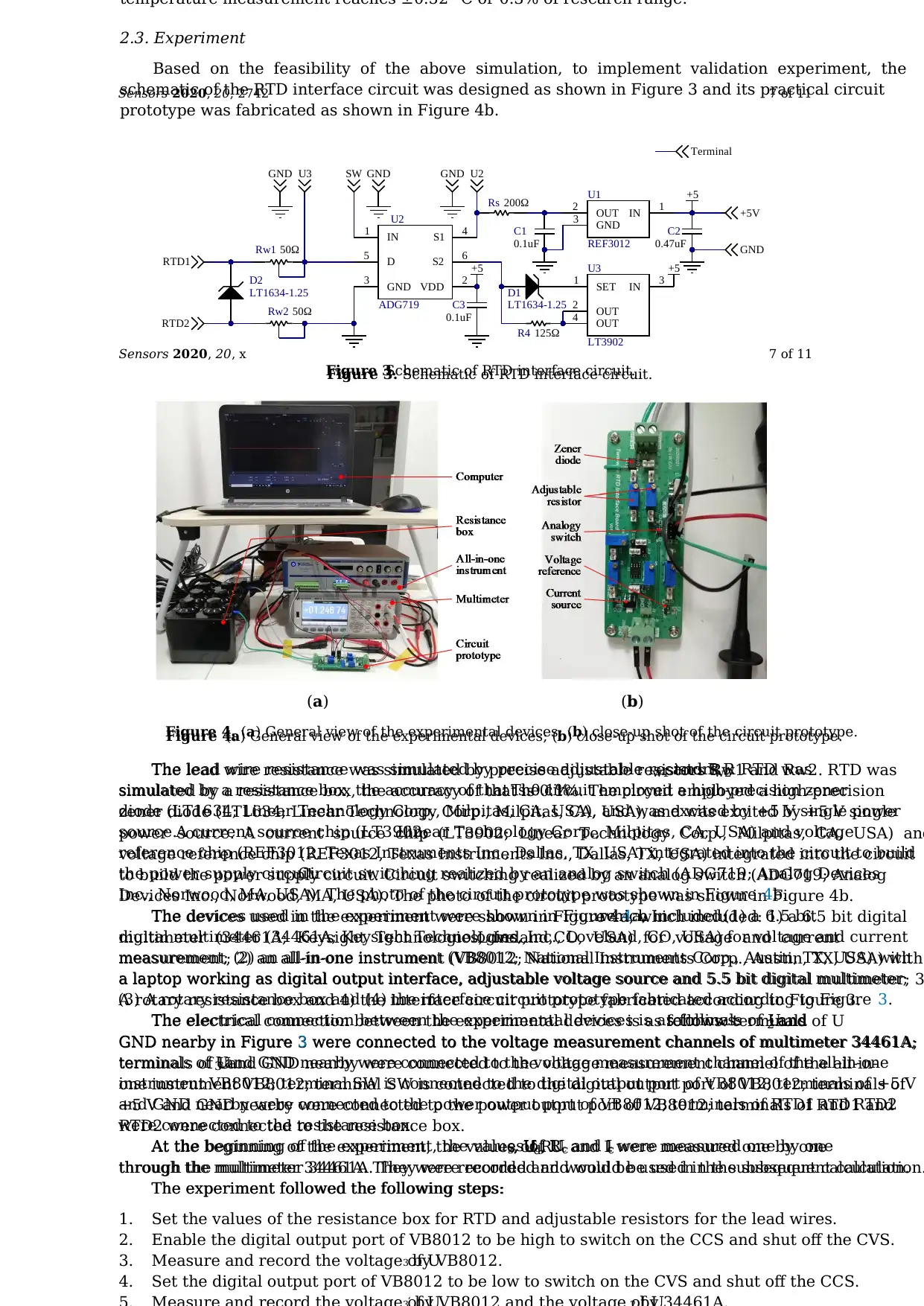
Figure 4. (a) General view of the experimental devices; (b) close-up shot of the circuit prototype.
The lead wire resistance was simulated by precise adjustable resistors Rw1 and Rw2. RTD was
simulated by a resistance box, the accuracy of that is 0.1%. The circuit employed a high-precision
zener diode (LT1634; Linear Technology Corp., Milpitas, CA, USA), and was excited by +5 V single
power source. A current source chip (LT3902; Linear Technology Corp., Milpitas, CA, USA) and
voltage reference chip (REF3012, Texas Instruments Inc., Dallas, TX, USA) integrated into the circuit
to build the power supply circuit. Circuit switching realized by an analog switch (ADG719; Analog
Devices Inc., Norwood, MA, USA). The photo of the circuit prototype was shown in Figure 4b.
The devices used in the experiment were shown in Figure 4a, which included: 1) a 6.5 bit digital
multimeter (34461A; Keysight Technologies, Inc.,Loveland,CO, USA) for voltage and current
measurement; 2) an all-in-one instrument (VB8012; National Instruments Corp., Austin, TX, USA) with
a laptop working as digital output interface, adjustable voltage source and 5.5 bit digital multimeter; 3
A rotary resistance box and 4) the interface circuit prototype fabricated according to Figure 3.
The electrical connection between the experimental devices is as follows: terminals of U2 and
GND nearby in Figure 3 were connected to the voltage measurement channels of multimeter 34461A;
terminals of U3 and GND nearby were connected to the voltage measurement channel of the all-in-
one instrument VB8012; terminal SW is connected to the digital output port of VB8012; terminals of
+5 V and GND nearby were connected to the power output port of VB8012; terminals of RTD1 and
RTD2 were connected to the resistance box.
At the beginning of the experiment, the values of Rs, Ud, Uc and Ic were measured one by one
through the multimeter 34461A. They were recorded and would be used in the subsequent calculation.
The experiment followed the following steps:
1. Set the values of the resistance box for RTD and adjustable resistors for the lead wires.
2. Enable the digital output port of VB8012 to be high to switch on the CCS and shut off the CVS.
3. Measure and record the voltage of U3 by VB8012.
4. Set the digital output port of VB8012 to be low to switch on the CVS and shut off the CCS.
‘
Figure 4.(a) General view of the experimental devices; (b) close-up shot of the circuit prototype.
The lead wire resistance was simulated by precise adjustable resistors Rw1 and Rw2. RTD was
simulated by a resistance box, the accuracy of that is 0.1%.The circuit employed a high-precision zener
diode (LT1634; Linear Technology Corp., Milpitas, CA, USA), and was excited by +5 V single power
source.A current source chip (LT3902;Linear Technology Corp., Milpitas, CA, USA) and voltage
reference chip (REF3012, Texas Instruments Inc., Dallas, TX, USA) integrated into the circuit to build
the power supply circuit.Circuit switching realized by an analog switch (ADG719; Analog Devices
Inc., Norwood, MA, USA). The photo of the circuit prototype was shown in Figure 4b.
The devices used in the experiment were shown in Figure 4a,which included:(1) a 6.5 bit
digital multimeter (34461A; Keysight Technologies, Inc., Loveland, CO, USA) for voltage and current
measurement; (2) an all-in-one instrument (VB8012; National Instruments Corp., Austin, TX, USA) with
a laptop working as digital output interface, adjustable voltage source and 5.5 bit digital multimeter;
(3) A rotary resistance box and (4) the interface circuit prototype fabricated according to Figure 3.
The electrical connection between the experimental devices is as follows:terminals of U2 and
GND nearby in Figure 3 were connected to the voltage measurement channels of multimeter 34461A;
terminals of U3 and GND nearby were connected to the voltage measurement channel of the all-in-one
instrument VB8012; terminal SW is connected to the digital output port of VB8012; terminals of +5 V
and GND nearby were connected to the power output port of VB8012; terminals of RTD1 and RTD2
were connected to the resistance box.
At the beginning of the experiment, the values of Rs, Ud , Uc and Ic were measured one by one
through the multimeter 34461A. They were recorded and would be used in the subsequent calculation.
The experiment followed the following steps:
temperature measurement reaches ±0.52 °C or 0.3% of research range.
2.3. Experiment
Based on the feasibility of the above simulation, to implement validation experiment, the
schematic of the RTD interface circuit was designed as shown in Figure 3 and its practical circuit
prototype was fabricated as shown in Figure 4b.
Figure 3. Schematic of RTD interface circuit.
OUT
2
SET
1 IN 3
OUT
4
U3
LT3902
125ΩR4
IN
1
VDD 2
GND
3
S1 4
D
5 S2 6
U2
ADG719
+5
SW
IN 1
OUT
2
GND
3
U1
REF30120.1uF
C1
+5
200ΩRs
U2
0.47uF
C2
+5
0.1uF
C3
U3
D1
LT1634-1.25
D2
LT1634-1.25
RTD2
RTD1
50ΩRw1
50ΩRw2
+5V
GND
GNDGNDGND
Terminal
Figure 3.Schematic of RTD interface circuit.
Sensors 2020, 20, x 7 of 11
(a) (b)
Figure 4. (a) General view of the experimental devices; (b) close-up shot of the circuit prototype.
The lead wire resistance was simulated by precise adjustable resistors Rw1 and Rw2. RTD was
simulated by a resistance box, the accuracy of that is 0.1%. The circuit employed a high-precision
zener diode (LT1634; Linear Technology Corp., Milpitas, CA, USA), and was excited by +5 V single
power source. A current source chip (LT3902; Linear Technology Corp., Milpitas, CA, USA) and
voltage reference chip (REF3012, Texas Instruments Inc., Dallas, TX, USA) integrated into the circuit
to build the power supply circuit. Circuit switching realized by an analog switch (ADG719; Analog
Devices Inc., Norwood, MA, USA). The photo of the circuit prototype was shown in Figure 4b.
The devices used in the experiment were shown in Figure 4a, which included: 1) a 6.5 bit digital
multimeter (34461A; Keysight Technologies, Inc.,Loveland,CO, USA) for voltage and current
measurement; 2) an all-in-one instrument (VB8012; National Instruments Corp., Austin, TX, USA) with
a laptop working as digital output interface, adjustable voltage source and 5.5 bit digital multimeter; 3
A rotary resistance box and 4) the interface circuit prototype fabricated according to Figure 3.
The electrical connection between the experimental devices is as follows: terminals of U2 and
GND nearby in Figure 3 were connected to the voltage measurement channels of multimeter 34461A;
terminals of U3 and GND nearby were connected to the voltage measurement channel of the all-in-
one instrument VB8012; terminal SW is connected to the digital output port of VB8012; terminals of
+5 V and GND nearby were connected to the power output port of VB8012; terminals of RTD1 and
RTD2 were connected to the resistance box.
At the beginning of the experiment, the values of Rs, Ud, Uc and Ic were measured one by one
through the multimeter 34461A. They were recorded and would be used in the subsequent calculation.
The experiment followed the following steps:
1. Set the values of the resistance box for RTD and adjustable resistors for the lead wires.
2. Enable the digital output port of VB8012 to be high to switch on the CCS and shut off the CVS.
3. Measure and record the voltage of U3 by VB8012.
4. Set the digital output port of VB8012 to be low to switch on the CVS and shut off the CCS.
‘
Figure 4.(a) General view of the experimental devices; (b) close-up shot of the circuit prototype.
The lead wire resistance was simulated by precise adjustable resistors Rw1 and Rw2. RTD was
simulated by a resistance box, the accuracy of that is 0.1%.The circuit employed a high-precision zener
diode (LT1634; Linear Technology Corp., Milpitas, CA, USA), and was excited by +5 V single power
source.A current source chip (LT3902;Linear Technology Corp., Milpitas, CA, USA) and voltage
reference chip (REF3012, Texas Instruments Inc., Dallas, TX, USA) integrated into the circuit to build
the power supply circuit.Circuit switching realized by an analog switch (ADG719; Analog Devices
Inc., Norwood, MA, USA). The photo of the circuit prototype was shown in Figure 4b.
The devices used in the experiment were shown in Figure 4a,which included:(1) a 6.5 bit
digital multimeter (34461A; Keysight Technologies, Inc., Loveland, CO, USA) for voltage and current
measurement; (2) an all-in-one instrument (VB8012; National Instruments Corp., Austin, TX, USA) with
a laptop working as digital output interface, adjustable voltage source and 5.5 bit digital multimeter;
(3) A rotary resistance box and (4) the interface circuit prototype fabricated according to Figure 3.
The electrical connection between the experimental devices is as follows:terminals of U2 and
GND nearby in Figure 3 were connected to the voltage measurement channels of multimeter 34461A;
terminals of U3 and GND nearby were connected to the voltage measurement channel of the all-in-one
instrument VB8012; terminal SW is connected to the digital output port of VB8012; terminals of +5 V
and GND nearby were connected to the power output port of VB8012; terminals of RTD1 and RTD2
were connected to the resistance box.
At the beginning of the experiment, the values of Rs, Ud , Uc and Ic were measured one by one
through the multimeter 34461A. They were recorded and would be used in the subsequent calculation.
The experiment followed the following steps:
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
Sensors 2020, 20, 2742 8 of 11
1. Set the values of the resistance box for RTD and adjustable resistors for the lead wires.
2. Enable the digital output port of VB8012 to be high to switch on the CCS and shut off the CVS.
3. Measure and record the voltage of U3 by VB8012.
4. Set the digital output port of VB8012 to be low to switch on the CVS and shut off the CCS.
5. Measure and record the voltage of U3’ by VB8012 and the voltage of U2 by 34461A.
After alternating the set points of the resistance box and the adjustable resistors,the above
steps were repeated one time to obtain a second set of measurements.After many repetitions,
more measurements were obtained.When the measurement was completed, all the data was input into
a spreadsheet to calculate the measured value of the resistance box and the corresponding temperature.
3.Results and Discussion
All experiments were carried out at an ambient temperature of 17.5◦C. The measured values of
other constants required for calculation are shown in Table 4.
Table 4.Parameters used in the simulation model.
ParametersReference Voltage
of CVS
Output Current
of CCS
Voltage Drop
of Zener Diode
Leakage Current
of Zener Diode
Sampling
Resistance
Value 1.2468 V 10.005 mA 1.2514 V 1.75 μA 200.03 Ω
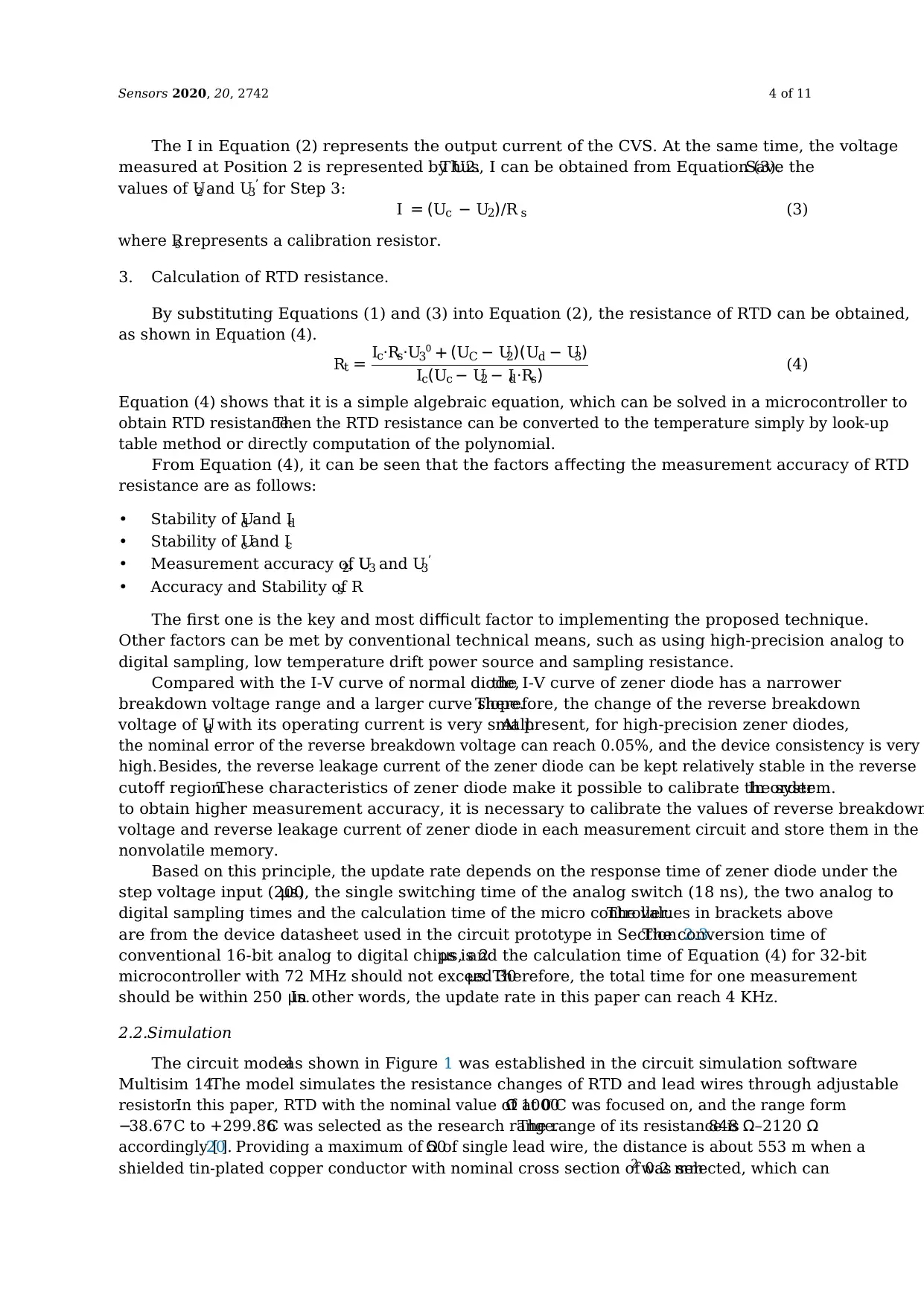
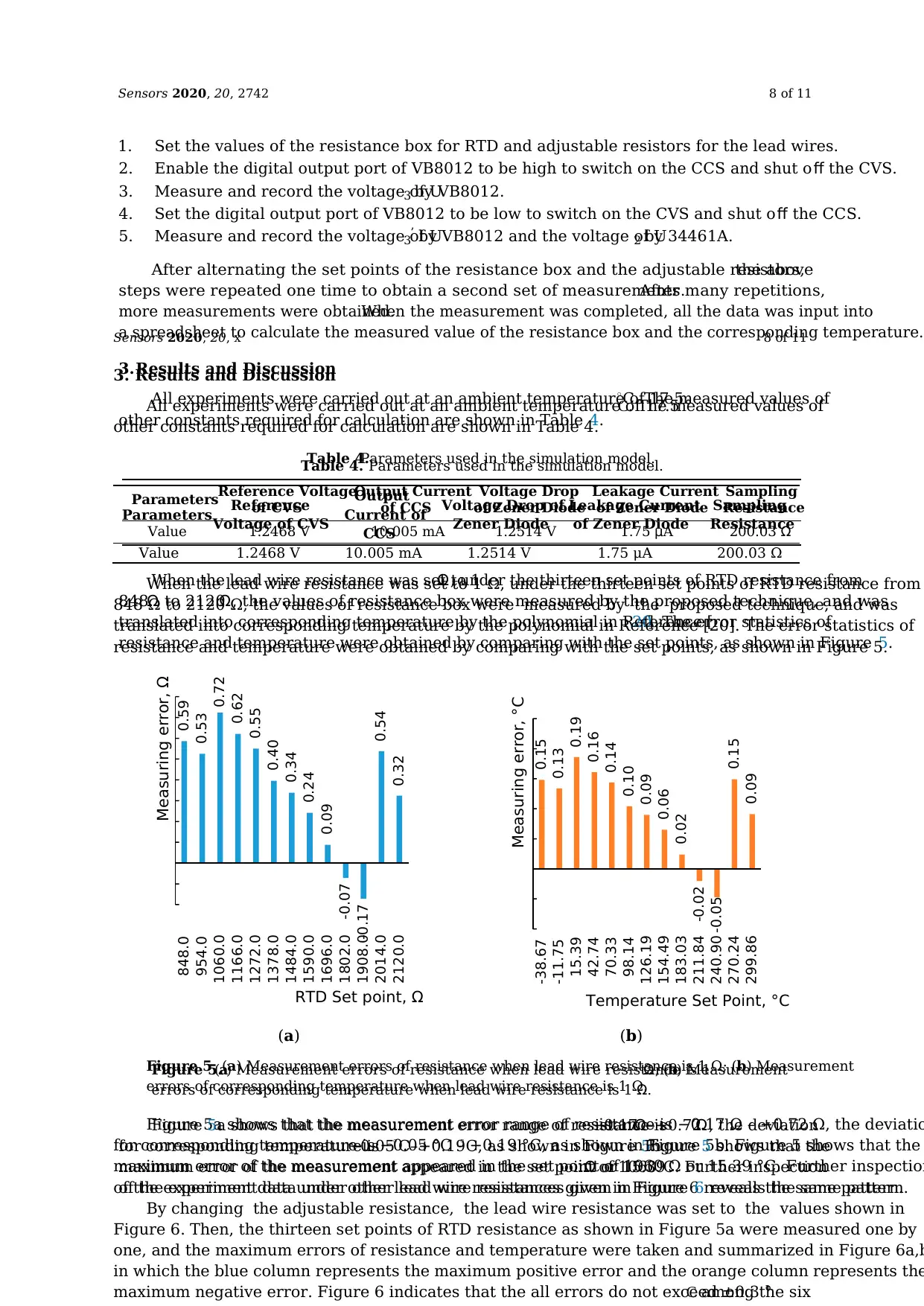
When the lead wire resistance was set to 1Ω , under the thirteen set points of RTD resistance from
848Ω to 2120Ω , the values of resistance box were measured by the proposed technique, and was
translated into corresponding temperature by the polynomial in Reference [20]. The error statistics of
resistance and temperature were obtained by comparing with the set points, as shown in Figure 5.
Sensors 2020, 20, x 8 of 11
3. Results and Discussion
All experiments were carried out at an ambient temperature of 17.5 °C. The measured values of
other constants required for calculation are shown in Table 4.
Table 4. Parameters used in the simulation model.
Parameters Reference
Voltage of CVS
Output
Current of
CCS
Voltage Drop of
Zener Diode
Leakage Current
of Zener Diode
Sampling
Resistance
Value 1.2468 V 10.005 mA 1.2514 V 1.75 μA 200.03 Ω
When the lead wire resistance was set to 1 Ω, under the thirteen set points of RTD resistance from
848 Ω to 2120 Ω, the values of resistance box were measured by the proposed technique, and was
translated into corresponding temperature by the polynomial in Reference [20]. The error statistics of
resistance and temperature were obtained by comparing with the set points, as shown in Figure 5.
(a) (b)
Figure 5. (a) Measurement errors of resistance when lead wire resistance is 1 Ω; (b) Measurement
errors of corresponding temperature when lead wire resistance is 1 Ω.
Figure 5a shows that the measurement error range of resistance is −0.17 Ω – +0.72 Ω, the deviatio
for corresponding temperature is −0.05 °C – +0.19 °C, as shown in Figure 5b. Figure 5 shows that the
maximum error of the measurement appeared in the set point of 1060 Ω or 15.39 °C. Further inspection
of the experiment data under other lead wire resistances given in Figure 6 reveals the same pattern.
By changing the adjustable resistance, the lead wire resistance was set to the values shown in
Figure 6. Then, the thirteen set points of RTD resistance as shown in Figure 5a were measured one by
one, and the maximum errors of resistance and temperature were taken and summarized in Figure 6a,b
in which the blue column represents the maximum positive error and the orange column represents the
maximum negative error. Figure 6 indicates that the all errors do not exceed ±0.3 °C among the six
0.59
0.53
0.72
0.62
0.55
0.40
0.34
0.24
0.09
-0.07
-0.17
0.54
0.32
848.0
954.0
1060.0
1166.0
1272.0
1378.0
1484.0
1590.0
1696.0
1802.0
1908.0
2014.0
2120.0
Measuring error, Ω
RTD Set point, Ω
0.15
0.13
0.19
0.16
0.14
0.10
0.09
0.06
0.02
-0.02
-0.05
0.15
0.09
-38.67
-11.75
15.39
42.74
70.33
98.14
126.19
154.49
183.03
211.84
240.90
270.24
299.86
Measuring error, °C
Temperature Set Point, °C
Figure 5.(a) Measurement errors of resistance when lead wire resistance is 1Ω ; (b) Measurement
errors of corresponding temperature when lead wire resistance is 1 Ω.
Figure 5a shows that the measurement error range of resistance is−0.17Ω –+0.72Ω , the deviation
for corresponding temperature is−0.05◦C–+0.19◦C, as shown in Figure 5b.Figure 5 shows that the
maximum error of the measurement appeared in the set point of 1060Ω or 15.39◦C. Further inspection
of the experiment data under other lead wire resistances given in Figure 6 reveals the same pattern.
1. Set the values of the resistance box for RTD and adjustable resistors for the lead wires.
2. Enable the digital output port of VB8012 to be high to switch on the CCS and shut off the CVS.
3. Measure and record the voltage of U3 by VB8012.
4. Set the digital output port of VB8012 to be low to switch on the CVS and shut off the CCS.
5. Measure and record the voltage of U3’ by VB8012 and the voltage of U2 by 34461A.
After alternating the set points of the resistance box and the adjustable resistors,the above
steps were repeated one time to obtain a second set of measurements.After many repetitions,
more measurements were obtained.When the measurement was completed, all the data was input into
a spreadsheet to calculate the measured value of the resistance box and the corresponding temperature.
3.Results and Discussion
All experiments were carried out at an ambient temperature of 17.5◦C. The measured values of
other constants required for calculation are shown in Table 4.
Table 4.Parameters used in the simulation model.
ParametersReference Voltage
of CVS
Output Current
of CCS
Voltage Drop
of Zener Diode
Leakage Current
of Zener Diode
Sampling
Resistance
Value 1.2468 V 10.005 mA 1.2514 V 1.75 μA 200.03 Ω
When the lead wire resistance was set to 1Ω , under the thirteen set points of RTD resistance from
848Ω to 2120Ω , the values of resistance box were measured by the proposed technique, and was
translated into corresponding temperature by the polynomial in Reference [20]. The error statistics of
resistance and temperature were obtained by comparing with the set points, as shown in Figure 5.
Sensors 2020, 20, x 8 of 11
3. Results and Discussion
All experiments were carried out at an ambient temperature of 17.5 °C. The measured values of
other constants required for calculation are shown in Table 4.
Table 4. Parameters used in the simulation model.
Parameters Reference
Voltage of CVS
Output
Current of
CCS
Voltage Drop of
Zener Diode
Leakage Current
of Zener Diode
Sampling
Resistance
Value 1.2468 V 10.005 mA 1.2514 V 1.75 μA 200.03 Ω
When the lead wire resistance was set to 1 Ω, under the thirteen set points of RTD resistance from
848 Ω to 2120 Ω, the values of resistance box were measured by the proposed technique, and was
translated into corresponding temperature by the polynomial in Reference [20]. The error statistics of
resistance and temperature were obtained by comparing with the set points, as shown in Figure 5.
(a) (b)
Figure 5. (a) Measurement errors of resistance when lead wire resistance is 1 Ω; (b) Measurement
errors of corresponding temperature when lead wire resistance is 1 Ω.
Figure 5a shows that the measurement error range of resistance is −0.17 Ω – +0.72 Ω, the deviatio
for corresponding temperature is −0.05 °C – +0.19 °C, as shown in Figure 5b. Figure 5 shows that the
maximum error of the measurement appeared in the set point of 1060 Ω or 15.39 °C. Further inspection
of the experiment data under other lead wire resistances given in Figure 6 reveals the same pattern.
By changing the adjustable resistance, the lead wire resistance was set to the values shown in
Figure 6. Then, the thirteen set points of RTD resistance as shown in Figure 5a were measured one by
one, and the maximum errors of resistance and temperature were taken and summarized in Figure 6a,b
in which the blue column represents the maximum positive error and the orange column represents the
maximum negative error. Figure 6 indicates that the all errors do not exceed ±0.3 °C among the six
0.59
0.53
0.72
0.62
0.55
0.40
0.34
0.24
0.09
-0.07
-0.17
0.54
0.32
848.0
954.0
1060.0
1166.0
1272.0
1378.0
1484.0
1590.0
1696.0
1802.0
1908.0
2014.0
2120.0
Measuring error, Ω
RTD Set point, Ω
0.15
0.13
0.19
0.16
0.14
0.10
0.09
0.06
0.02
-0.02
-0.05
0.15
0.09
-38.67
-11.75
15.39
42.74
70.33
98.14
126.19
154.49
183.03
211.84
240.90
270.24
299.86
Measuring error, °C
Temperature Set Point, °C
Figure 5.(a) Measurement errors of resistance when lead wire resistance is 1Ω ; (b) Measurement
errors of corresponding temperature when lead wire resistance is 1 Ω.
Figure 5a shows that the measurement error range of resistance is−0.17Ω –+0.72Ω , the deviation
for corresponding temperature is−0.05◦C–+0.19◦C, as shown in Figure 5b.Figure 5 shows that the
maximum error of the measurement appeared in the set point of 1060Ω or 15.39◦C. Further inspection
of the experiment data under other lead wire resistances given in Figure 6 reveals the same pattern.
Sensors 2020, 20, 2742 9 of 11Sensors 2020, 20, x 9 of 11
(a) (b)
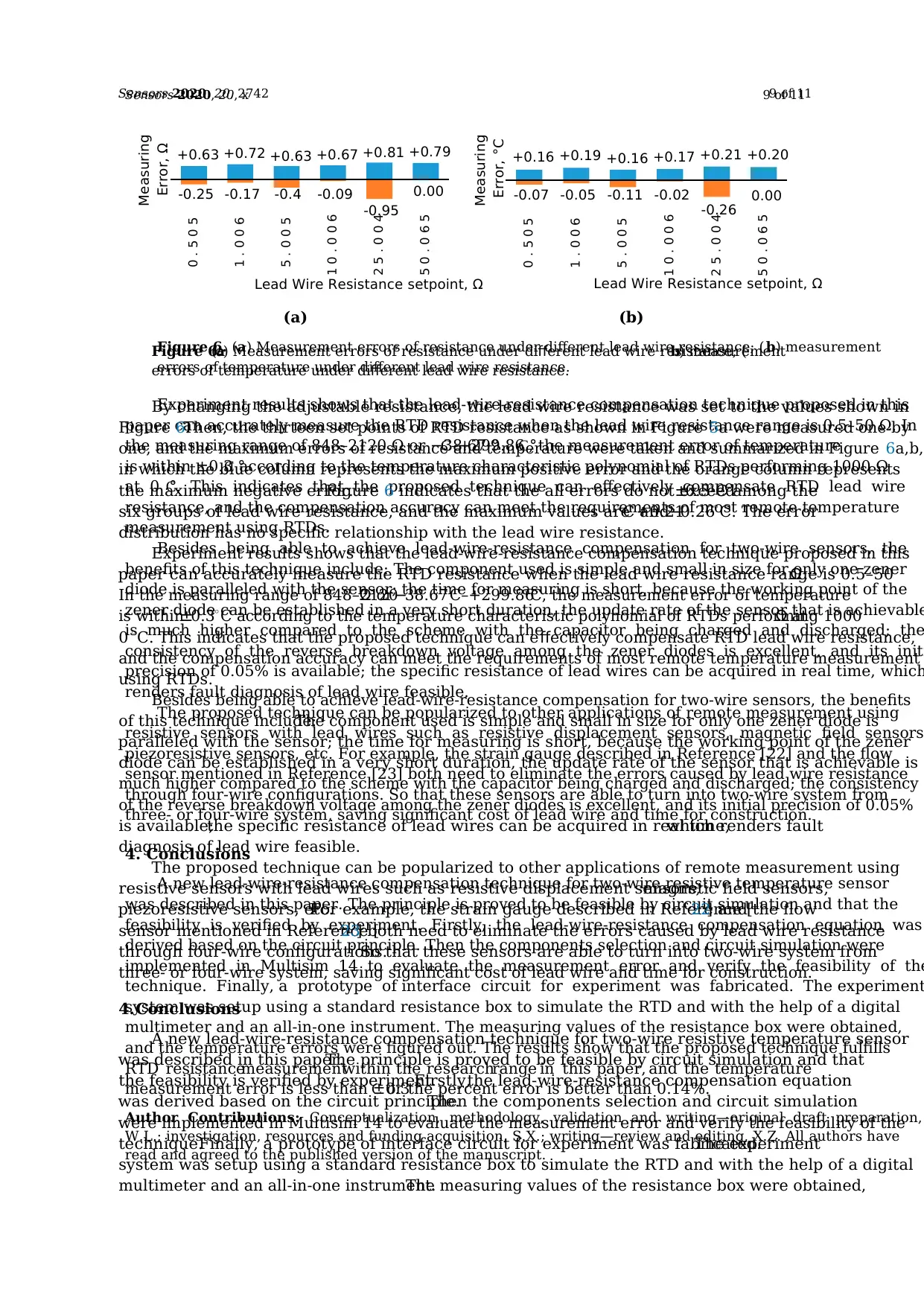
Figure 6. (a) Measurement errors of resistance under different lead wire resistance; ( b) measurement
errors of temperature under different lead wire resistance.
Experiment results shows that the lead-wire-resistance compensation technique proposed in this
paper can accurately measure the RTD resistance when the lead wire resistance range is 0.5–50 Ω. In
the measuring range of 848–2120 Ω or −38.67 °C–+299.86 °C, the measurement error of temperature
is within ±0.3 °C according to the temperature characteristic polynomial of RTDs performing 1000 Ω
at 0 °C. This indicates that the proposed technique can effectively compensate RTD lead wire
resistance, and the compensation accuracy can meet the requirements of most remote temperature
measurement using RTDs.
Besides being able to achieve lead-wire-resistance compensation for two-wire sensors, the
benefits of this technique include: The component used is simple and small in size for only one zener
diode is paralleled with the sensor; the time for measuring is short, because the working point of the
zener diode can be established in a very short duration, the update rate of the sensor that is achievable
is much higher compared to the scheme with the capacitor being charged and discharged; the
consistency of the reverse breakdown voltage among the zener diodes is excellent, and its initi
precision of 0.05% is available; the specific resistance of lead wires can be acquired in real time, which
renders fault diagnosis of lead wire feasible.
The proposed technique can be popularized to other applications of remote measurement using
resistive sensors with lead wires such as resistive displacement sensors, magnetic field sensors
piezoresistive sensors, etc. For example, the strain gauge described in Reference [22] and the flow
sensor mentioned in Reference [23] both need to eliminate the errors caused by lead wire resistance
through four-wire configurations. So that these sensors are able to turn into two-wire system from
three- or four-wire system, saving significant cost of lead wire and time for construction.
4. Conclusions
A new lead-wire-resistance compensation technique for two-wire resistive temperature sensor
was described in this paper. The principle is proved to be feasible by circuit simulation and that the
feasibility is verified by experiment. Firstly, the lead-wire-resistance compensation equation was
derived based on the circuit principle. Then the components selection and circuit simulation were
implemented in Multisim 14 to evaluate the measurement error and verify the feasibility of the
technique. Finally, a prototype of interface circuit for experiment was fabricated. The experiment
system was setup using a standard resistance box to simulate the RTD and with the help of a digital
multimeter and an all-in-one instrument. The measuring values of the resistance box were obtained,
and the temperature errors were figured out. The results show that the proposed technique fulfills
RTD resistancemeasurementwithin the researchrange in this paper, and the temperature
measurement error is less than ±0.3 °C or the percent error is better than 0.14%.
Author Contributions: Conceptualization, methodology, validation and writing—original draft preparation,
W.L.; investigation, resources and funding acquisition, S.X.; writing—review and editing, X.Z. All authors have
read and agreed to the published version of the manuscript.
+0.63 +0.72 +0.63 +0.67 +0.81 +0.79
-0.25 -0.17 -0.4 -0.09
-0.95
0.00
0 . 5 0 5
1 . 0 0 6
5 . 0 0 5
1 0 . 0 0 6
2 5 . 0 0 4
5 0 . 0 6 5
Measuring
Error, Ω
Lead Wire Resistance setpoint, Ω
+0.16 +0.19 +0.16 +0.17 +0.21 +0.20
-0.07 -0.05 -0.11 -0.02
-0.26
0.00
0 . 5 0 5
1 . 0 0 6
5 . 0 0 5
1 0 . 0 0 6
2 5 . 0 0 4
5 0 . 0 6 5
Measuring
Error, °C
Lead Wire Resistance setpoint, Ω
Figure 6.(a) Measurement errors of resistance under different lead wire resistance; (b) measurement
errors of temperature under different lead wire resistance.
By changing the adjustable resistance, the lead wire resistance was set to the values shown in
Figure 6.Then, the thirteen set points of RTD resistance as shown in Figure 5a were measured one by
one, and the maximum errors of resistance and temperature were taken and summarized in Figure 6a,b,
in which the blue column represents the maximum positive error and the orange column represents
the maximum negative error.Figure 6 indicates that the all errors do not exceed±0.3◦C among the
six groups of lead wire resistance, and the maximum values are +0.21◦C and−0.26◦C. The error
distribution has no specific relationship with the lead wire resistance.
Experiment results shows that the lead-wire-resistance compensation technique proposed in this
paper can accurately measure the RTD resistance when the lead wire resistance range is 0.5–50Ω .
In the measuring range of 848–2120Ω or −38.67◦ C–+299.86◦ C, the measurement error of temperature
is within±0.3◦ C according to the temperature characteristic polynomial of RTDs performing 1000Ω at
0 ◦C. This indicates that the proposed technique can effectively compensate RTD lead wire resistance,
and the compensation accuracy can meet the requirements of most remote temperature measurement
using RTDs.
Besides being able to achieve lead-wire-resistance compensation for two-wire sensors, the benefits
of this technique include:The component used is simple and small in size for only one zener diode is
paralleled with the sensor; the time for measuring is short, because the working point of the zener
diode can be established in a very short duration, the update rate of the sensor that is achievable is
much higher compared to the scheme with the capacitor being charged and discharged; the consistency
of the reverse breakdown voltage among the zener diodes is excellent, and its initial precision of 0.05%
is available;the specific resistance of lead wires can be acquired in real time,which renders fault
diagnosis of lead wire feasible.
The proposed technique can be popularized to other applications of remote measurement using
resistive sensors with lead wires such as resistive displacement sensors,magnetic field sensors,
piezoresistive sensors, etc.For example, the strain gauge described in Reference [22] and the flow
sensor mentioned in Reference [23] both need to eliminate the errors caused by lead wire resistance
through four-wire configurations.So that these sensors are able to turn into two-wire system from
three- or four-wire system, saving significant cost of lead wire and time for construction.
4.Conclusions
A new lead-wire-resistance compensation technique for two-wire resistive temperature sensor
was described in this paper.The principle is proved to be feasible by circuit simulation and that
the feasibility is verified by experiment.Firstly,the lead-wire-resistance compensation equation
was derived based on the circuit principle.Then the components selection and circuit simulation
were implemented in Multisim 14 to evaluate the measurement error and verify the feasibility of the
technique.Finally, a prototype of interface circuit for experiment was fabricated.The experiment
system was setup using a standard resistance box to simulate the RTD and with the help of a digital
multimeter and an all-in-one instrument.The measuring values of the resistance box were obtained,
(a) (b)
Figure 6. (a) Measurement errors of resistance under different lead wire resistance; ( b) measurement
errors of temperature under different lead wire resistance.
Experiment results shows that the lead-wire-resistance compensation technique proposed in this
paper can accurately measure the RTD resistance when the lead wire resistance range is 0.5–50 Ω. In
the measuring range of 848–2120 Ω or −38.67 °C–+299.86 °C, the measurement error of temperature
is within ±0.3 °C according to the temperature characteristic polynomial of RTDs performing 1000 Ω
at 0 °C. This indicates that the proposed technique can effectively compensate RTD lead wire
resistance, and the compensation accuracy can meet the requirements of most remote temperature
measurement using RTDs.
Besides being able to achieve lead-wire-resistance compensation for two-wire sensors, the
benefits of this technique include: The component used is simple and small in size for only one zener
diode is paralleled with the sensor; the time for measuring is short, because the working point of the
zener diode can be established in a very short duration, the update rate of the sensor that is achievable
is much higher compared to the scheme with the capacitor being charged and discharged; the
consistency of the reverse breakdown voltage among the zener diodes is excellent, and its initi
precision of 0.05% is available; the specific resistance of lead wires can be acquired in real time, which
renders fault diagnosis of lead wire feasible.
The proposed technique can be popularized to other applications of remote measurement using
resistive sensors with lead wires such as resistive displacement sensors, magnetic field sensors
piezoresistive sensors, etc. For example, the strain gauge described in Reference [22] and the flow
sensor mentioned in Reference [23] both need to eliminate the errors caused by lead wire resistance
through four-wire configurations. So that these sensors are able to turn into two-wire system from
three- or four-wire system, saving significant cost of lead wire and time for construction.
4. Conclusions
A new lead-wire-resistance compensation technique for two-wire resistive temperature sensor
was described in this paper. The principle is proved to be feasible by circuit simulation and that the
feasibility is verified by experiment. Firstly, the lead-wire-resistance compensation equation was
derived based on the circuit principle. Then the components selection and circuit simulation were
implemented in Multisim 14 to evaluate the measurement error and verify the feasibility of the
technique. Finally, a prototype of interface circuit for experiment was fabricated. The experiment
system was setup using a standard resistance box to simulate the RTD and with the help of a digital
multimeter and an all-in-one instrument. The measuring values of the resistance box were obtained,
and the temperature errors were figured out. The results show that the proposed technique fulfills
RTD resistancemeasurementwithin the researchrange in this paper, and the temperature
measurement error is less than ±0.3 °C or the percent error is better than 0.14%.
Author Contributions: Conceptualization, methodology, validation and writing—original draft preparation,
W.L.; investigation, resources and funding acquisition, S.X.; writing—review and editing, X.Z. All authors have
read and agreed to the published version of the manuscript.
+0.63 +0.72 +0.63 +0.67 +0.81 +0.79
-0.25 -0.17 -0.4 -0.09
-0.95
0.00
0 . 5 0 5
1 . 0 0 6
5 . 0 0 5
1 0 . 0 0 6
2 5 . 0 0 4
5 0 . 0 6 5
Measuring
Error, Ω
Lead Wire Resistance setpoint, Ω
+0.16 +0.19 +0.16 +0.17 +0.21 +0.20
-0.07 -0.05 -0.11 -0.02
-0.26
0.00
0 . 5 0 5
1 . 0 0 6
5 . 0 0 5
1 0 . 0 0 6
2 5 . 0 0 4
5 0 . 0 6 5
Measuring
Error, °C
Lead Wire Resistance setpoint, Ω
Figure 6.(a) Measurement errors of resistance under different lead wire resistance; (b) measurement
errors of temperature under different lead wire resistance.
By changing the adjustable resistance, the lead wire resistance was set to the values shown in
Figure 6.Then, the thirteen set points of RTD resistance as shown in Figure 5a were measured one by
one, and the maximum errors of resistance and temperature were taken and summarized in Figure 6a,b,
in which the blue column represents the maximum positive error and the orange column represents
the maximum negative error.Figure 6 indicates that the all errors do not exceed±0.3◦C among the
six groups of lead wire resistance, and the maximum values are +0.21◦C and−0.26◦C. The error
distribution has no specific relationship with the lead wire resistance.
Experiment results shows that the lead-wire-resistance compensation technique proposed in this
paper can accurately measure the RTD resistance when the lead wire resistance range is 0.5–50Ω .
In the measuring range of 848–2120Ω or −38.67◦ C–+299.86◦ C, the measurement error of temperature
is within±0.3◦ C according to the temperature characteristic polynomial of RTDs performing 1000Ω at
0 ◦C. This indicates that the proposed technique can effectively compensate RTD lead wire resistance,
and the compensation accuracy can meet the requirements of most remote temperature measurement
using RTDs.
Besides being able to achieve lead-wire-resistance compensation for two-wire sensors, the benefits
of this technique include:The component used is simple and small in size for only one zener diode is
paralleled with the sensor; the time for measuring is short, because the working point of the zener
diode can be established in a very short duration, the update rate of the sensor that is achievable is
much higher compared to the scheme with the capacitor being charged and discharged; the consistency
of the reverse breakdown voltage among the zener diodes is excellent, and its initial precision of 0.05%
is available;the specific resistance of lead wires can be acquired in real time,which renders fault
diagnosis of lead wire feasible.
The proposed technique can be popularized to other applications of remote measurement using
resistive sensors with lead wires such as resistive displacement sensors,magnetic field sensors,
piezoresistive sensors, etc.For example, the strain gauge described in Reference [22] and the flow
sensor mentioned in Reference [23] both need to eliminate the errors caused by lead wire resistance
through four-wire configurations.So that these sensors are able to turn into two-wire system from
three- or four-wire system, saving significant cost of lead wire and time for construction.
4.Conclusions
A new lead-wire-resistance compensation technique for two-wire resistive temperature sensor
was described in this paper.The principle is proved to be feasible by circuit simulation and that
the feasibility is verified by experiment.Firstly,the lead-wire-resistance compensation equation
was derived based on the circuit principle.Then the components selection and circuit simulation
were implemented in Multisim 14 to evaluate the measurement error and verify the feasibility of the
technique.Finally, a prototype of interface circuit for experiment was fabricated.The experiment
system was setup using a standard resistance box to simulate the RTD and with the help of a digital
multimeter and an all-in-one instrument.The measuring values of the resistance box were obtained,
⊘ This is a preview!⊘
Do you want full access?
Subscribe today to unlock all pages.
Trusted by 1+ million students worldwide
Sensors 2020, 20, 2742 10 of 11
and the temperature errors were figured out.The results show that the proposed technique fulfills RTD
resistance measurement within the research range in this paper, and the temperature measurement
error is less than ±0.3◦C or the percent error is better than 0.14%.
Author Contributions:Conceptualization, methodology, validation and writing—original draft preparation, W.L.;
investigation, resources and funding acquisition, S.X.; writing—review and editing, X.Z. All authors have read
and agreed to the published version of the manuscript.
Funding:This research was funded by The National Key Research and Development Program for New Energy
Vehicles in 2018 “Power System Platform and Vehicle Integration Technology for Extended-Range Fuel Cell Cars”
(2018YFB0105400).And it was also funded by Longquan Innovation Center of Zhejiang University.
Conflicts of Interest:The authors declare no conflict of interest.The funders had no role in the design of the
study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to
publish the results.
References
1. Maxim, RTD Measurement System Design Essentials.Available online:https://www.maximintegrated.com/
cn/design/technical-documents/app-notes/6/6262.html (accessed on 15 February 2020).
2. Maiti, T.K.; Kar, A. Novel Remote Measurement Technique Using Resistive Sensor as Grounded Load in an
Opamp Based V-to-I Converter.IEEE Sens.J. 2009, 9, 244–245.[CrossRef]
3. Tipparat, J. Interface Circuit for Three-Wire Resistance Temperature Detector with Lead Wire Resistance
Compensation.In Proceedings of the 2019 Research, Invention, and Innovation Congress (RI2C), Bangkok,
Thailand, 11–13 December 2019; IEEE: New York, NY, USA, 2020.
4. Erkan, K.; Akkoyunlu, B.; Balkan, E.; Tayanc, M. A portable borehole temperature logging system using the
four-wire resistance method.J. Geophys.Eng.2017, 14, 1413–1419.[CrossRef]
5. Maiti, T.K. A novel lead-wire-resistance compensation technique using two-wire resistance temperature
detector.IEEE Sens.J. 2006, 6, 1454–1458.[CrossRef]
6. Vishal, J.; Boby, G. An efficient digitization scheme for resistive sensors interfaced through quarter bridge.
In Proceedings of the 2017 Eleventh InternationalConference on Sensing Technology (ICST),Sydney,
Australia, 4–6 December 2017; IEEE: New York, NY, USA, 2018.
7. Vishal,J.; Boby,G. Self-balancing digitizer for resistive half-bridge.In Proceedings of the 2018 IEEE
International Instrumentation and Measurement Technology Conference (I2MTC),Houston,TX, USA,
14–17 May 2018; IEEE: New York, NY, USA, 2018.
8. Pradhan, S.; Sen, S. An Improved Lead Compensation Technique for Three-Wire Resistance Temperature
Detectors.IEEE Trans.Instrum.Meas.1999, 48, 903–905.[CrossRef]
9. Lai, L.; Feng, J.; Shi, L.B. Quasi-Balance Four-Terminal Resistance Bridge.IEEE Trans.Instrum.Meas.2015,
64, 1636–1641.[CrossRef]
10. Kishore, K.; Malik, S.; Baghini, M.S.; Akbar, S.A. A Dual-Differential Subtractor-Based Auto-Nulling Signal
Conditioning Circuit for Wide-Range Resistive Sensors.IEEE Sens.J. 2020, 20, 3047–3056.[CrossRef]
11. Sen, S.K. An improved lead wire compensation technique for conventional two wire resistance temperature
detectors (RTDs).Measurement 2006, 39, 477–480.[CrossRef]
12. Elangovan, K.; Anoop, C.S. Simple and Efficient Relaxation-Oscillator Based Digital Techniques for Resistive
Sensors—Design and Performance Evaluation.IEEE Trans.Instrum.Meas.2020, in press.
13. Petchmaneelumka, W.; Julsereewong, P.; Julsereewong, A.; Tongpakpanang, J. Simple Interface Circuit with
Lead-Wire-Resistance Compensation for Single Resistive Sensors.In Proceedings of the 12th International
Conference on Control,Automation and Systems (ICCAS), ICC, Jeju,Korea,17–21 October 2012;IEEE:
New York, NY, USA, 2012; pp. 1076–1079.
14. Prasit, J.; Amphawan, J.; Apinai, R.; Nakorn, P. Simple resistance-to-time converter with lead-wire-resistance
compensation.In Proceedings of the SICE Annual Conference 2011, Tokyo, Japan, 13–18 September 2011.
15. Philip, V.N. Direct Microcontroller Interface based Digital Readout Circuit for Single-Element Resistive
Sensors.In Proceedings of the IEEE International Conference on Power, Control, Signals and Instrumentation
Engineering (IEEE ICPCSI),Chennai,India,21–22 September 2017;IEEE:New York,NY, USA, 2018;
pp. 2480–2483.
and the temperature errors were figured out.The results show that the proposed technique fulfills RTD
resistance measurement within the research range in this paper, and the temperature measurement
error is less than ±0.3◦C or the percent error is better than 0.14%.
Author Contributions:Conceptualization, methodology, validation and writing—original draft preparation, W.L.;
investigation, resources and funding acquisition, S.X.; writing—review and editing, X.Z. All authors have read
and agreed to the published version of the manuscript.
Funding:This research was funded by The National Key Research and Development Program for New Energy
Vehicles in 2018 “Power System Platform and Vehicle Integration Technology for Extended-Range Fuel Cell Cars”
(2018YFB0105400).And it was also funded by Longquan Innovation Center of Zhejiang University.
Conflicts of Interest:The authors declare no conflict of interest.The funders had no role in the design of the
study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to
publish the results.
References
1. Maxim, RTD Measurement System Design Essentials.Available online:https://www.maximintegrated.com/
cn/design/technical-documents/app-notes/6/6262.html (accessed on 15 February 2020).
2. Maiti, T.K.; Kar, A. Novel Remote Measurement Technique Using Resistive Sensor as Grounded Load in an
Opamp Based V-to-I Converter.IEEE Sens.J. 2009, 9, 244–245.[CrossRef]
3. Tipparat, J. Interface Circuit for Three-Wire Resistance Temperature Detector with Lead Wire Resistance
Compensation.In Proceedings of the 2019 Research, Invention, and Innovation Congress (RI2C), Bangkok,
Thailand, 11–13 December 2019; IEEE: New York, NY, USA, 2020.
4. Erkan, K.; Akkoyunlu, B.; Balkan, E.; Tayanc, M. A portable borehole temperature logging system using the
four-wire resistance method.J. Geophys.Eng.2017, 14, 1413–1419.[CrossRef]
5. Maiti, T.K. A novel lead-wire-resistance compensation technique using two-wire resistance temperature
detector.IEEE Sens.J. 2006, 6, 1454–1458.[CrossRef]
6. Vishal, J.; Boby, G. An efficient digitization scheme for resistive sensors interfaced through quarter bridge.
In Proceedings of the 2017 Eleventh InternationalConference on Sensing Technology (ICST),Sydney,
Australia, 4–6 December 2017; IEEE: New York, NY, USA, 2018.
7. Vishal,J.; Boby,G. Self-balancing digitizer for resistive half-bridge.In Proceedings of the 2018 IEEE
International Instrumentation and Measurement Technology Conference (I2MTC),Houston,TX, USA,
14–17 May 2018; IEEE: New York, NY, USA, 2018.
8. Pradhan, S.; Sen, S. An Improved Lead Compensation Technique for Three-Wire Resistance Temperature
Detectors.IEEE Trans.Instrum.Meas.1999, 48, 903–905.[CrossRef]
9. Lai, L.; Feng, J.; Shi, L.B. Quasi-Balance Four-Terminal Resistance Bridge.IEEE Trans.Instrum.Meas.2015,
64, 1636–1641.[CrossRef]
10. Kishore, K.; Malik, S.; Baghini, M.S.; Akbar, S.A. A Dual-Differential Subtractor-Based Auto-Nulling Signal
Conditioning Circuit for Wide-Range Resistive Sensors.IEEE Sens.J. 2020, 20, 3047–3056.[CrossRef]
11. Sen, S.K. An improved lead wire compensation technique for conventional two wire resistance temperature
detectors (RTDs).Measurement 2006, 39, 477–480.[CrossRef]
12. Elangovan, K.; Anoop, C.S. Simple and Efficient Relaxation-Oscillator Based Digital Techniques for Resistive
Sensors—Design and Performance Evaluation.IEEE Trans.Instrum.Meas.2020, in press.
13. Petchmaneelumka, W.; Julsereewong, P.; Julsereewong, A.; Tongpakpanang, J. Simple Interface Circuit with
Lead-Wire-Resistance Compensation for Single Resistive Sensors.In Proceedings of the 12th International
Conference on Control,Automation and Systems (ICCAS), ICC, Jeju,Korea,17–21 October 2012;IEEE:
New York, NY, USA, 2012; pp. 1076–1079.
14. Prasit, J.; Amphawan, J.; Apinai, R.; Nakorn, P. Simple resistance-to-time converter with lead-wire-resistance
compensation.In Proceedings of the SICE Annual Conference 2011, Tokyo, Japan, 13–18 September 2011.
15. Philip, V.N. Direct Microcontroller Interface based Digital Readout Circuit for Single-Element Resistive
Sensors.In Proceedings of the IEEE International Conference on Power, Control, Signals and Instrumentation
Engineering (IEEE ICPCSI),Chennai,India,21–22 September 2017;IEEE:New York,NY, USA, 2018;
pp. 2480–2483.
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser
Sensors 2020, 20, 2742 11 of 11
16. Philip,V.N.Digital readout circuit with direct microcontroller interface for bridge-connected resistive
sensors. In Proceedings of the 2017 IEEE InternationalConference on Circuits and Systems (ICCS),
Thiruvananthapuram, India, 20–21 December 2017; IEEE: New York, NY, USA, 2018.
17. Ramya,A.; Umapathy,M.; Uma,G. Enhanced Microcontroller Interface of Resistive Sensors through
Resistance-to-Time Converter.IEEE Trans.Instrum.Meas.2020, in press.
18. Nagarajan,P.R.;George,B.; Kumar,V.J.Improved Single-Element Resistive Sensor-to-Microcontroller
Interface.IEEE Trans.Instrum.2017, 66, 2736–2744.[CrossRef]
19. Analog Devices, Micropower Precision Shunt Voltage Reference, Datasheet LT1634.Available online:https:
//www.analog.com/media/en/technical-documentation/data-sheets/1634ff.pdf (accessed on 12 April 2020).
20. Heraeus, Resistance Value According to DIN EN 60751.Available online:https://www.heraeus.cn/media/
media/hne/datasheets/usa_only/technical_information/Resistance_Table_DIN_EN_60751_1000_Ohm_02-
2001_EN.pdf (accessed on 12 April 2020).
21. Zhong, L.; Yuan, F. Study on the Influence on Temperature Field by Thermal Characteristics of Sensor in
High Precision Temperature Measurement.Available online:http://en.cnki.com.cn/Article_en/CJFDTotal-
YQXB2004S2051.htm (accessed on 31 December 2004).
22. Li, C.Y.;Wu, P.M.;Wu, Z.Z.; Ahn, C.H.;Hartings,J.A.; Narayan,R.K. Smart catheter flow sensor for
continuous regional cerebral blood flow monitoring.In Proceedings of the 10th IEEE Conference on Sensors,
Limerick, Ireland, 28–31 October 2011; IEEE: New York, NY, USA, 2011; pp. 1417–1420.
23. Gaikar, S.V.; Deshmukh, N.N. Effect of Excitation Voltage and Lead wire Resistance on Strain Measurement.
In Proceedings of the 2nd International Conference for Convergence in Technology (I2CT), Mumbai, India,
7–9 April 2017; IEEE: New York, NY, USA, 2017; pp. 747–752.
© 2020 by the authors.Licensee MDPI, Basel, Switzerland.This article is an open access
article distributed under the terms and conditions of the Creative Commons Attribution
(CC BY) license (http://creativecommons.org/licenses/by/4.0/).
16. Philip,V.N.Digital readout circuit with direct microcontroller interface for bridge-connected resistive
sensors. In Proceedings of the 2017 IEEE InternationalConference on Circuits and Systems (ICCS),
Thiruvananthapuram, India, 20–21 December 2017; IEEE: New York, NY, USA, 2018.
17. Ramya,A.; Umapathy,M.; Uma,G. Enhanced Microcontroller Interface of Resistive Sensors through
Resistance-to-Time Converter.IEEE Trans.Instrum.Meas.2020, in press.
18. Nagarajan,P.R.;George,B.; Kumar,V.J.Improved Single-Element Resistive Sensor-to-Microcontroller
Interface.IEEE Trans.Instrum.2017, 66, 2736–2744.[CrossRef]
19. Analog Devices, Micropower Precision Shunt Voltage Reference, Datasheet LT1634.Available online:https:
//www.analog.com/media/en/technical-documentation/data-sheets/1634ff.pdf (accessed on 12 April 2020).
20. Heraeus, Resistance Value According to DIN EN 60751.Available online:https://www.heraeus.cn/media/
media/hne/datasheets/usa_only/technical_information/Resistance_Table_DIN_EN_60751_1000_Ohm_02-
2001_EN.pdf (accessed on 12 April 2020).
21. Zhong, L.; Yuan, F. Study on the Influence on Temperature Field by Thermal Characteristics of Sensor in
High Precision Temperature Measurement.Available online:http://en.cnki.com.cn/Article_en/CJFDTotal-
YQXB2004S2051.htm (accessed on 31 December 2004).
22. Li, C.Y.;Wu, P.M.;Wu, Z.Z.; Ahn, C.H.;Hartings,J.A.; Narayan,R.K. Smart catheter flow sensor for
continuous regional cerebral blood flow monitoring.In Proceedings of the 10th IEEE Conference on Sensors,
Limerick, Ireland, 28–31 October 2011; IEEE: New York, NY, USA, 2011; pp. 1417–1420.
23. Gaikar, S.V.; Deshmukh, N.N. Effect of Excitation Voltage and Lead wire Resistance on Strain Measurement.
In Proceedings of the 2nd International Conference for Convergence in Technology (I2CT), Mumbai, India,
7–9 April 2017; IEEE: New York, NY, USA, 2017; pp. 747–752.
© 2020 by the authors.Licensee MDPI, Basel, Switzerland.This article is an open access
article distributed under the terms and conditions of the Creative Commons Attribution
(CC BY) license (http://creativecommons.org/licenses/by/4.0/).
1 out of 11

Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
Copyright © 2020–2026 A2Z Services. All Rights Reserved. Developed and managed by ZUCOL.