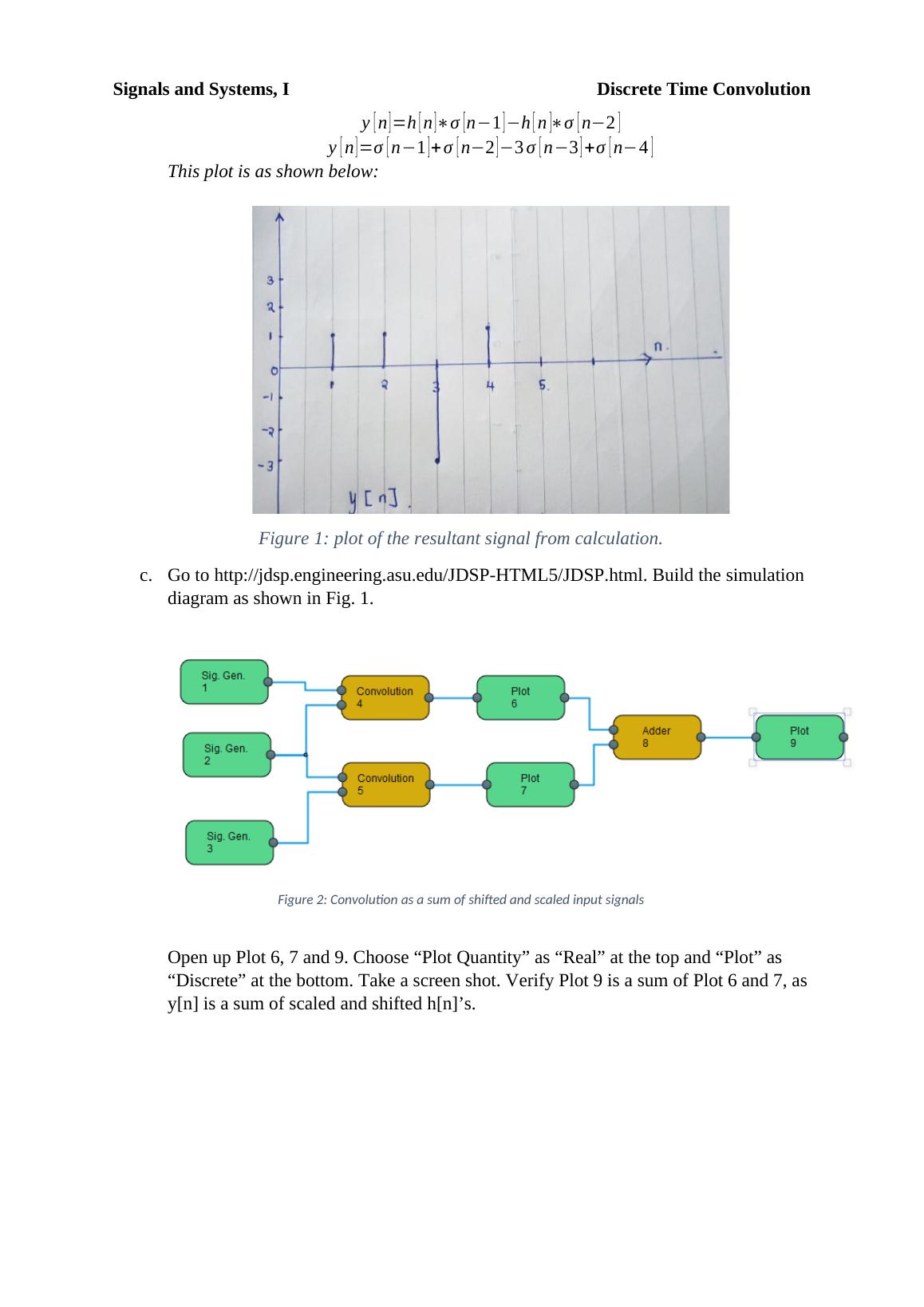
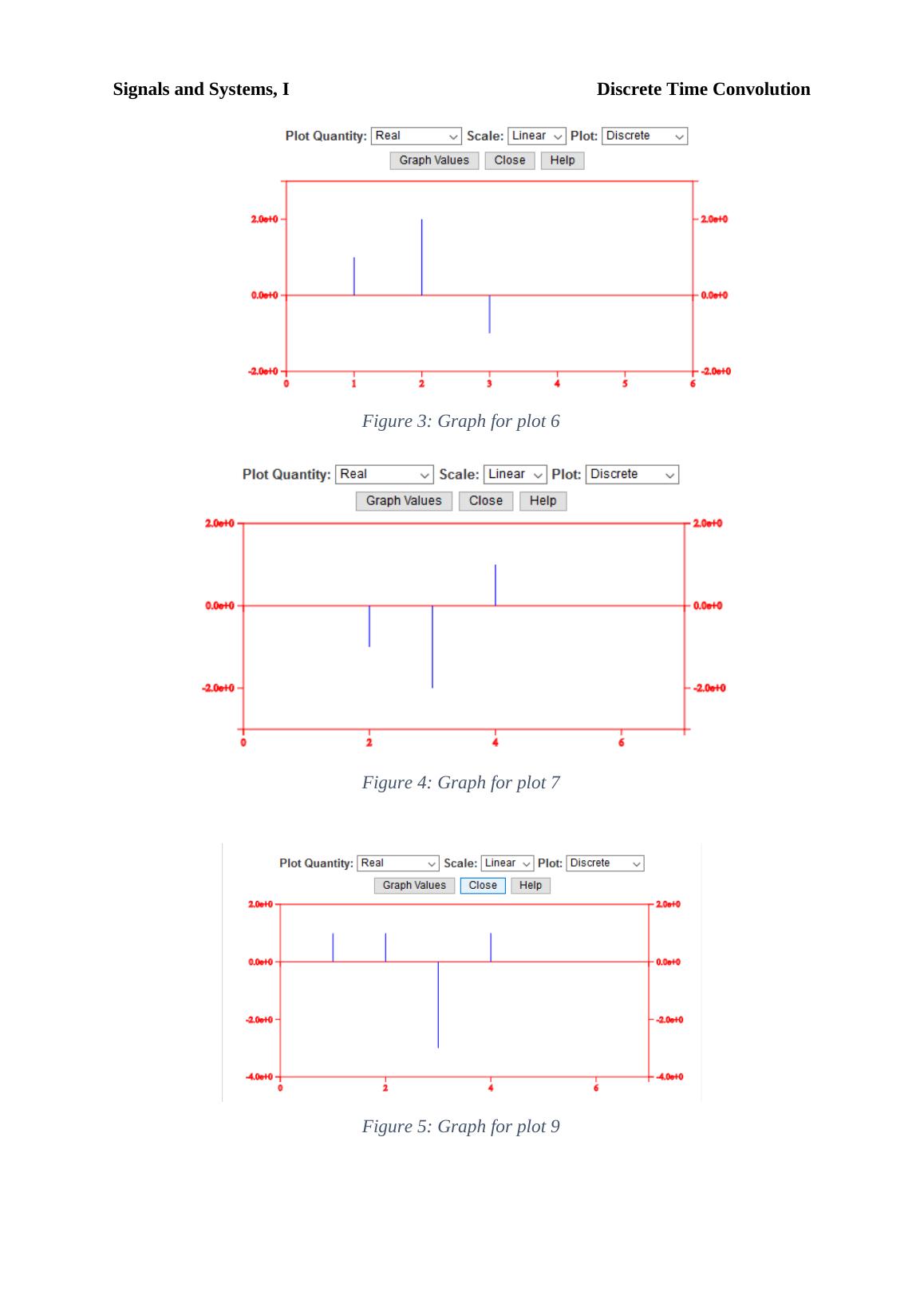
Discrete Time Convolution
This assignment focuses on understanding and implementing discrete time convolution using J-DSP software.
18 Pages2708 Words68 Views
Added on 2022-12-21
About This Document
This assignment focuses on discrete time convolution in signals and systems. It covers the convolution with delta, window, unit step, and exponential functions. Students will learn how to perform convolution and implement it on a computer or DSP chip.
Discrete Time Convolution
This assignment focuses on understanding and implementing discrete time convolution using J-DSP software.
Added on 2022-12-21
ShareRelated Documents


End of preview
Want to access all the pages? Upload your documents or become a member.
Signals and System
|20
|879
|362
SEO for Desklib: Title, Meta Title, Meta Description, Slug, Summary, Subject, Course Code, Course Name, College/University
|22
|2084
|204
DSP for Communications Laboratory Manual
|35
|7310
|32
Signals and Systems I ECE 351 Computing Assignment #2
|7
|928
|251
Estimate dh/dt Assignment 2022
|23
|3294
|15
Frequency reuse factor | Assignment
|15
|2219
|29