Signals, Systems, and Transforms: Calculation Paper on Signals
VerifiedAdded on 2023/06/15
|11
|2204
|318
AI Summary
This is a calculation paper on signals for Signals, Systems, and Transforms course. It explains how to determine if a system is stable, causal, linear, time-invariant, and memoryless. It also shows how to check if signals are periodic. The paper includes solutions to homework problems and is supported by a bibliography. The subject is Electrical Engineering and the course code is not mentioned. The college/university is not mentioned either.
Contribute Materials
Your contribution can guide someone’s learning journey. Share your
documents today.

Electrical Engineering 1
SIGNALS, SYSTEMS, ANDTRANSFORMS
A Calculation Paper on Signals By
Student’s Name
Name of the Professor
Institutional Affiliation
City/State
Year/Month/Day
SIGNALS, SYSTEMS, ANDTRANSFORMS
A Calculation Paper on Signals By
Student’s Name
Name of the Professor
Institutional Affiliation
City/State
Year/Month/Day
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.

Electrical Engineering 2
Homework 2
Problem 1
For the following systems please determine if the system is: (1) stable, (2) Causual, (3) linear,
(4) time invariant, and (5) memoryless. Please explain why.
(a) Tx[n] = ∑
k=n 0
n
x (k ) where n is not equal to 0
i. Stable
Consider x(n) to be constant. Then it can be observed that Tx[n] ∞ as n ∞
Therefore the system is not stable
ii. Causual
Since the output at n depends on the present and past values of n, the system is
causal. Hence this system is Causal (Jackson, 2015).
iii. Linear
Consider x3(n) = ax1[n] + bx2[n]
Where y1[n] and y2[2] are outputs for x1[n] and x[n] respectively:
Tx[n] = ∑
k=n 0
n
x 3(k )
= ∑
k=n 0
n
ax 1(k ) + bx2 (k)
= a ∑
k=n 0
n
x 1(k ) + b ∑
k=n 0
n
x 2(k )
= ay1 [n] + by2 [n]
Therefore, the system is linear
Homework 2
Problem 1
For the following systems please determine if the system is: (1) stable, (2) Causual, (3) linear,
(4) time invariant, and (5) memoryless. Please explain why.
(a) Tx[n] = ∑
k=n 0
n
x (k ) where n is not equal to 0
i. Stable
Consider x(n) to be constant. Then it can be observed that Tx[n] ∞ as n ∞
Therefore the system is not stable
ii. Causual
Since the output at n depends on the present and past values of n, the system is
causal. Hence this system is Causal (Jackson, 2015).
iii. Linear
Consider x3(n) = ax1[n] + bx2[n]
Where y1[n] and y2[2] are outputs for x1[n] and x[n] respectively:
Tx[n] = ∑
k=n 0
n
x 3(k )
= ∑
k=n 0
n
ax 1(k ) + bx2 (k)
= a ∑
k=n 0
n
x 1(k ) + b ∑
k=n 0
n
x 2(k )
= ay1 [n] + by2 [n]
Therefore, the system is linear

Electrical Engineering 3
iv. Time invariant
Consider x2[n] = x1[n-no]
Where y1[n] is output for x1[n]
We have, y2[n] = ∑
k=n 0
n
x 2(k )
= ∑
k=n 0
n
x 1(k−no)
= ∑
k=n 0
n−no
x 1(k )
= y1[n-no]
Therefore, the system is Time-variant (Phillips, 2011)
v. Memoryless
This system is given by Tx[n] = ∑
k=n 0
n
x (k ), since te output depends on the previous input
values, the system has memory. Therefore this system is no memoryless.
b. Tx[n] = ∑
k=n−no
n +no
x (k )
i. Stable
Consider x[n] to be constant, it can be noted that Tx[n] ∞ as n ∞.
Therefore, the system is Not Stable
ii. Causual
Since the output n depends on the current and past values of n, it can be said that this system
is Causual. Therefore the system is Causual.
iv. Time invariant
Consider x2[n] = x1[n-no]
Where y1[n] is output for x1[n]
We have, y2[n] = ∑
k=n 0
n
x 2(k )
= ∑
k=n 0
n
x 1(k−no)
= ∑
k=n 0
n−no
x 1(k )
= y1[n-no]
Therefore, the system is Time-variant (Phillips, 2011)
v. Memoryless
This system is given by Tx[n] = ∑
k=n 0
n
x (k ), since te output depends on the previous input
values, the system has memory. Therefore this system is no memoryless.
b. Tx[n] = ∑
k=n−no
n +no
x (k )
i. Stable
Consider x[n] to be constant, it can be noted that Tx[n] ∞ as n ∞.
Therefore, the system is Not Stable
ii. Causual
Since the output n depends on the current and past values of n, it can be said that this system
is Causual. Therefore the system is Causual.
Electrical Engineering 4
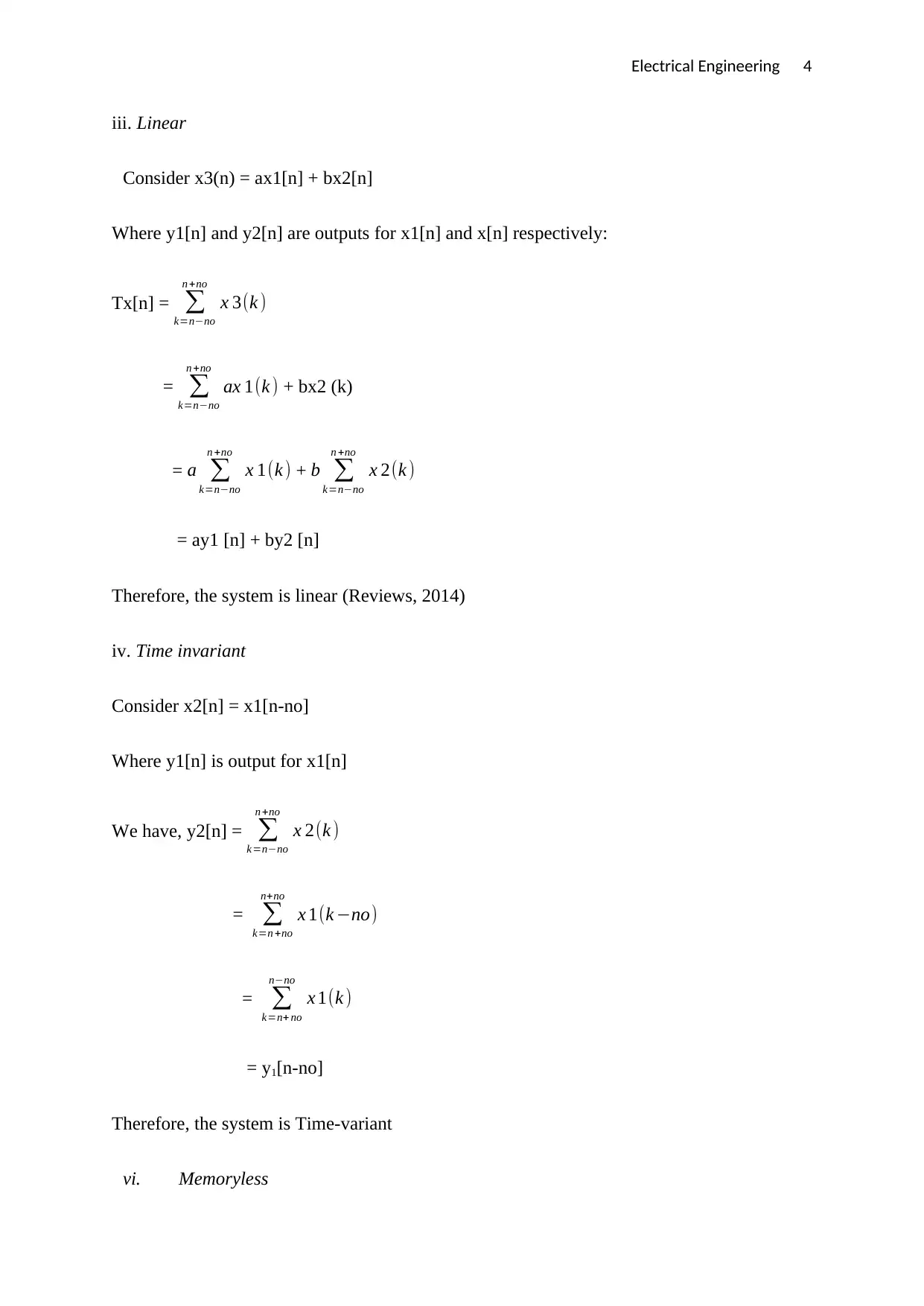
iii. Linear
Consider x3(n) = ax1[n] + bx2[n]
Where y1[n] and y2[n] are outputs for x1[n] and x[n] respectively:
Tx[n] = ∑
k=n−no
n +no
x 3(k )
= ∑
k=n−no
n +no
ax 1(k ) + bx2 (k)
= a ∑
k=n−no
n +no
x 1(k ) + b ∑
k=n−no
n +no
x 2(k )
= ay1 [n] + by2 [n]
Therefore, the system is linear (Reviews, 2014)
iv. Time invariant
Consider x2[n] = x1[n-no]
Where y1[n] is output for x1[n]
We have, y2[n] = ∑
k=n−no
n +no
x 2(k )
= ∑
k=n +no
n+no
x 1(k −no)
= ∑
k=n+ no
n−no
x 1(k )
= y1[n-no]
Therefore, the system is Time-variant
vi. Memoryless
iii. Linear
Consider x3(n) = ax1[n] + bx2[n]
Where y1[n] and y2[n] are outputs for x1[n] and x[n] respectively:
Tx[n] = ∑
k=n−no
n +no
x 3(k )
= ∑
k=n−no
n +no
ax 1(k ) + bx2 (k)
= a ∑
k=n−no
n +no
x 1(k ) + b ∑
k=n−no
n +no
x 2(k )
= ay1 [n] + by2 [n]
Therefore, the system is linear (Reviews, 2014)
iv. Time invariant
Consider x2[n] = x1[n-no]
Where y1[n] is output for x1[n]
We have, y2[n] = ∑
k=n−no
n +no
x 2(k )
= ∑
k=n +no
n+no
x 1(k −no)
= ∑
k=n+ no
n−no
x 1(k )
= y1[n-no]
Therefore, the system is Time-variant
vi. Memoryless
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.
Electrical Engineering 5
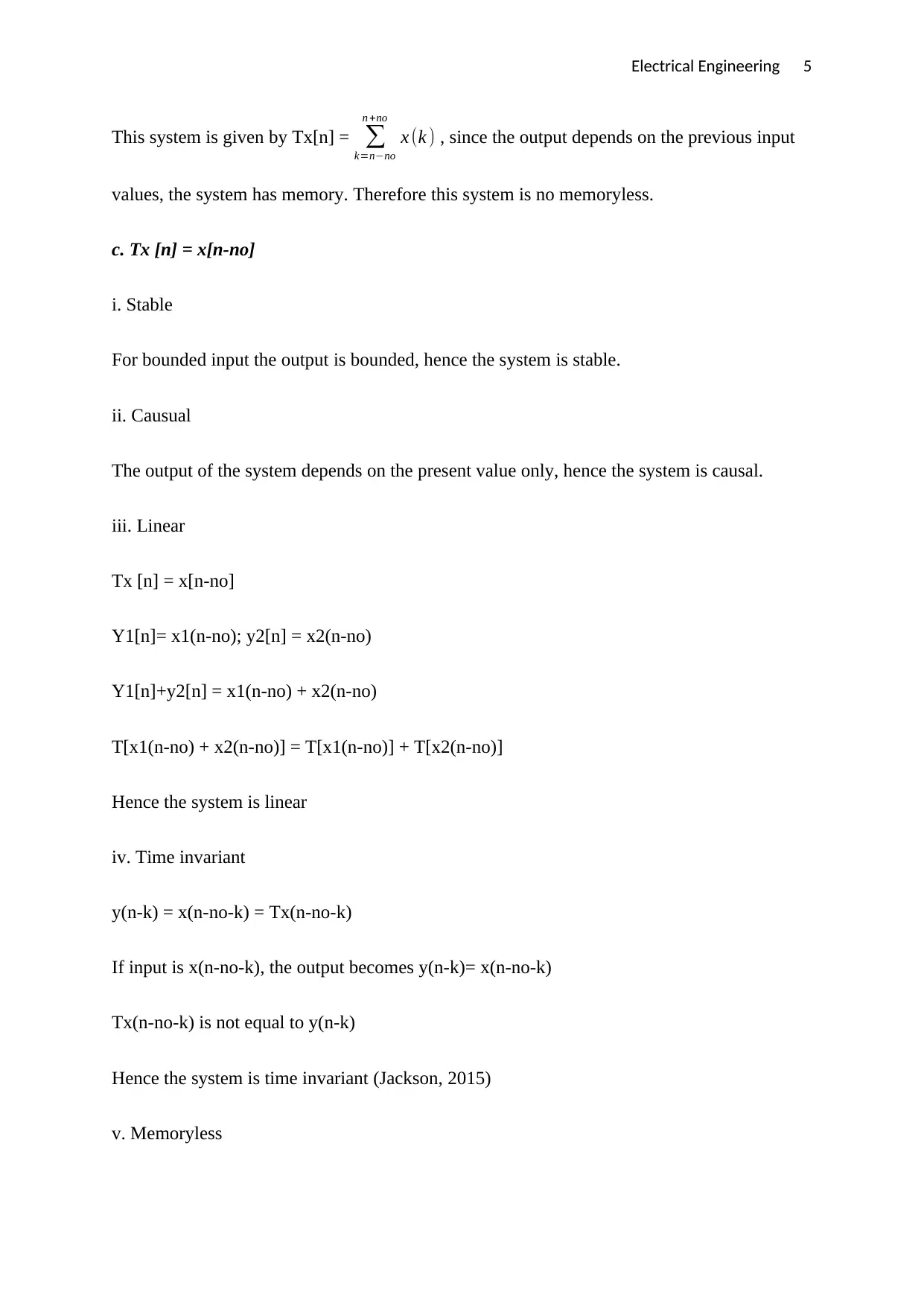
This system is given by Tx[n] = ∑
k=n−no
n +no
x (k ) , since the output depends on the previous input
values, the system has memory. Therefore this system is no memoryless.
c. Tx [n] = x[n-no]
i. Stable
For bounded input the output is bounded, hence the system is stable.
ii. Causual
The output of the system depends on the present value only, hence the system is causal.
iii. Linear
Tx [n] = x[n-no]
Y1[n]= x1(n-no); y2[n] = x2(n-no)
Y1[n]+y2[n] = x1(n-no) + x2(n-no)
T[x1(n-no) + x2(n-no)] = T[x1(n-no)] + T[x2(n-no)]
Hence the system is linear
iv. Time invariant
y(n-k) = x(n-no-k) = Tx(n-no-k)
If input is x(n-no-k), the output becomes y(n-k)= x(n-no-k)
Tx(n-no-k) is not equal to y(n-k)
Hence the system is time invariant (Jackson, 2015)
v. Memoryless
This system is given by Tx[n] = ∑
k=n−no
n +no
x (k ) , since the output depends on the previous input
values, the system has memory. Therefore this system is no memoryless.
c. Tx [n] = x[n-no]
i. Stable
For bounded input the output is bounded, hence the system is stable.
ii. Causual
The output of the system depends on the present value only, hence the system is causal.
iii. Linear
Tx [n] = x[n-no]
Y1[n]= x1(n-no); y2[n] = x2(n-no)
Y1[n]+y2[n] = x1(n-no) + x2(n-no)
T[x1(n-no) + x2(n-no)] = T[x1(n-no)] + T[x2(n-no)]
Hence the system is linear
iv. Time invariant
y(n-k) = x(n-no-k) = Tx(n-no-k)
If input is x(n-no-k), the output becomes y(n-k)= x(n-no-k)
Tx(n-no-k) is not equal to y(n-k)
Hence the system is time invariant (Jackson, 2015)
v. Memoryless
Electrical Engineering 6
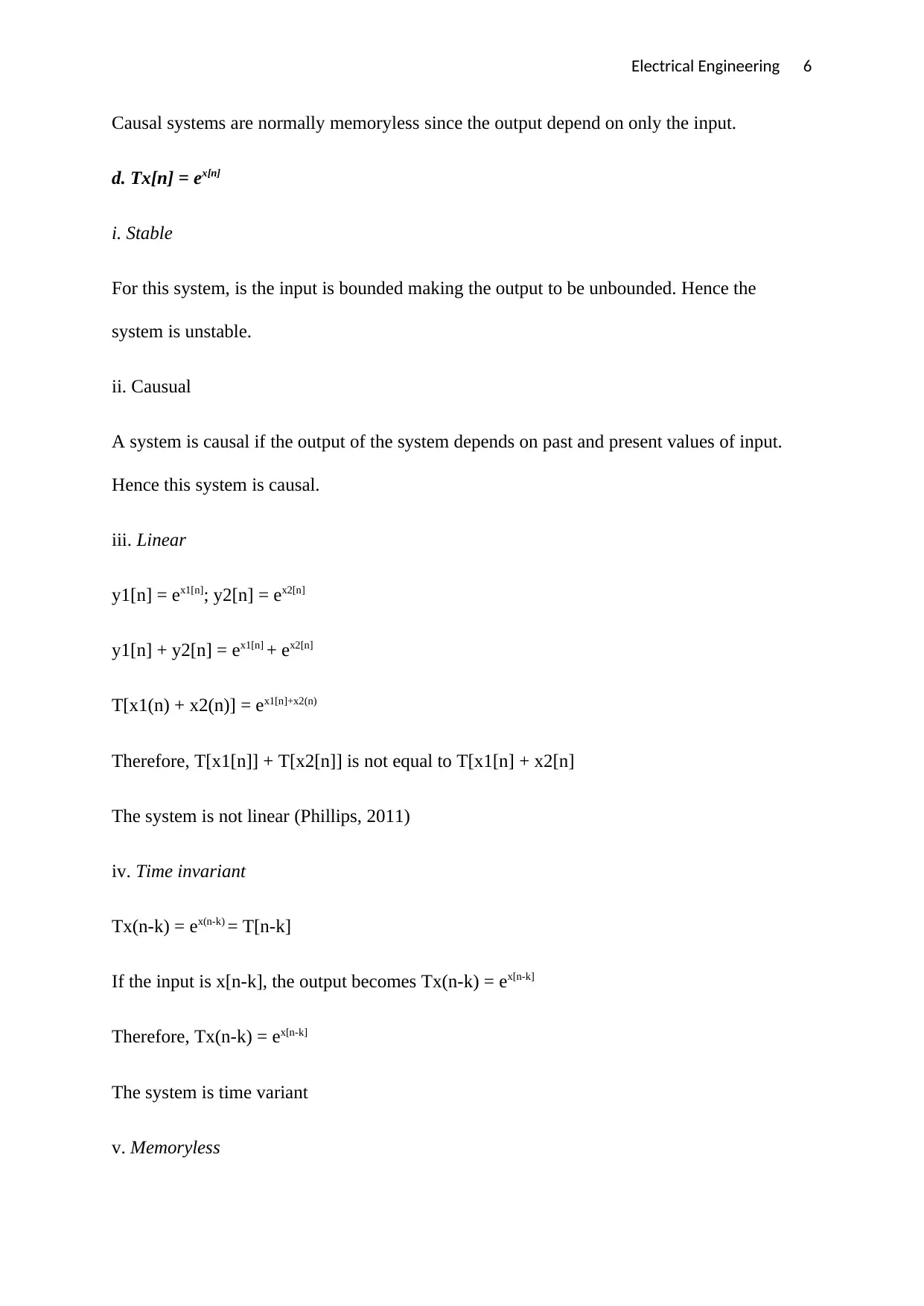
Causal systems are normally memoryless since the output depend on only the input.
d. Tx[n] = ex[n]
i. Stable
For this system, is the input is bounded making the output to be unbounded. Hence the
system is unstable.
ii. Causual
A system is causal if the output of the system depends on past and present values of input.
Hence this system is causal.
iii. Linear
y1[n] = ex1[n]; y2[n] = ex2[n]
y1[n] + y2[n] = ex1[n] + ex2[n]
T[x1(n) + x2(n)] = ex1[n]+x2(n)
Therefore, T[x1[n]] + T[x2[n]] is not equal to T[x1[n] + x2[n]
The system is not linear (Phillips, 2011)
iv. Time invariant
Tx(n-k) = ex(n-k) = T[n-k]
If the input is x[n-k], the output becomes Tx(n-k) = ex[n-k]
Therefore, Tx(n-k) = ex[n-k]
The system is time variant
v. Memoryless
Causal systems are normally memoryless since the output depend on only the input.
d. Tx[n] = ex[n]
i. Stable
For this system, is the input is bounded making the output to be unbounded. Hence the
system is unstable.
ii. Causual
A system is causal if the output of the system depends on past and present values of input.
Hence this system is causal.
iii. Linear
y1[n] = ex1[n]; y2[n] = ex2[n]
y1[n] + y2[n] = ex1[n] + ex2[n]
T[x1(n) + x2(n)] = ex1[n]+x2(n)
Therefore, T[x1[n]] + T[x2[n]] is not equal to T[x1[n] + x2[n]
The system is not linear (Phillips, 2011)
iv. Time invariant
Tx(n-k) = ex(n-k) = T[n-k]
If the input is x[n-k], the output becomes Tx(n-k) = ex[n-k]
Therefore, Tx(n-k) = ex[n-k]
The system is time variant
v. Memoryless
Electrical Engineering 7
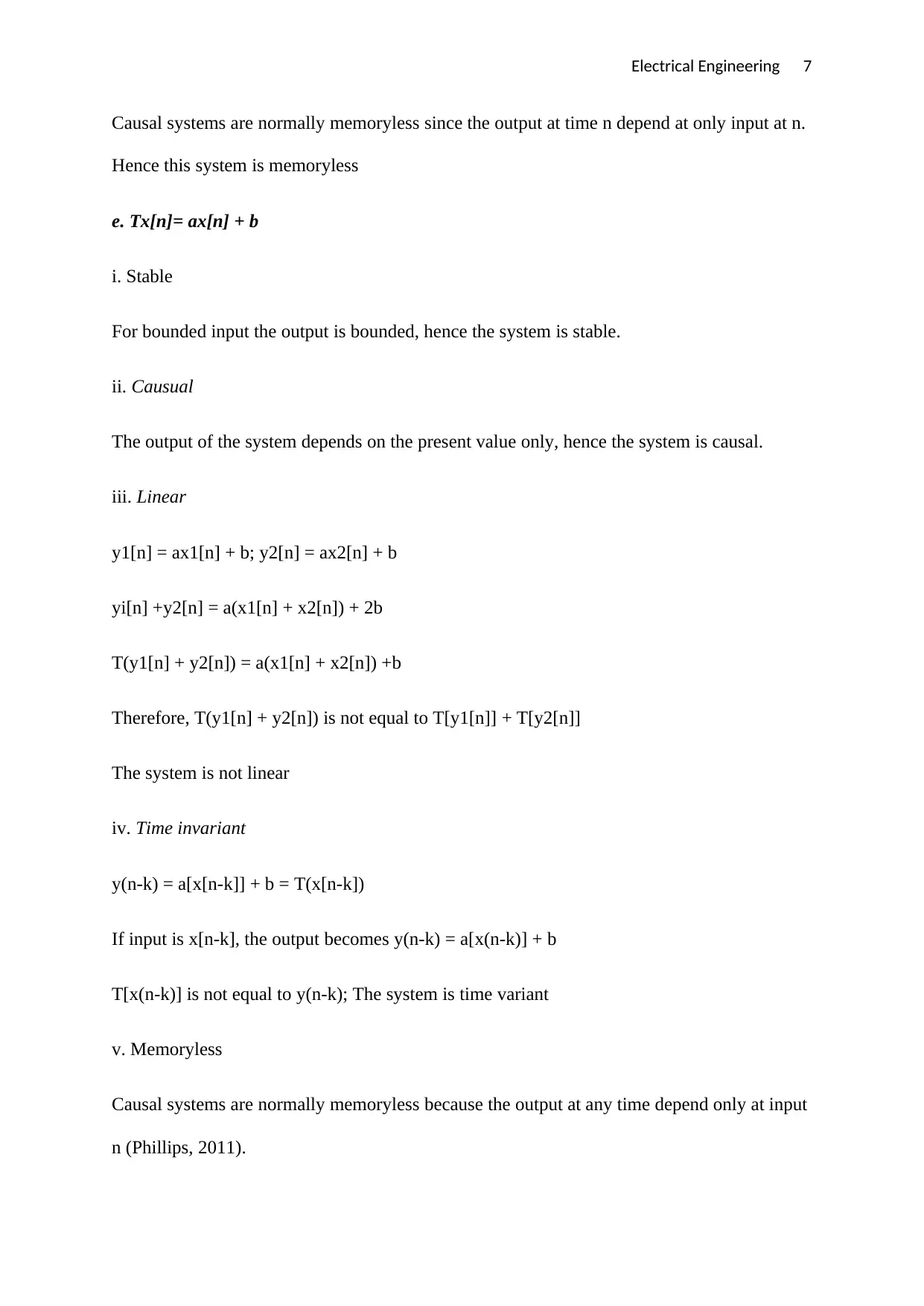
Causal systems are normally memoryless since the output at time n depend at only input at n.
Hence this system is memoryless
e. Tx[n]= ax[n] + b
i. Stable
For bounded input the output is bounded, hence the system is stable.
ii. Causual
The output of the system depends on the present value only, hence the system is causal.
iii. Linear
y1[n] = ax1[n] + b; y2[n] = ax2[n] + b
yi[n] +y2[n] = a(x1[n] + x2[n]) + 2b
T(y1[n] + y2[n]) = a(x1[n] + x2[n]) +b
Therefore, T(y1[n] + y2[n]) is not equal to T[y1[n]] + T[y2[n]]
The system is not linear
iv. Time invariant
y(n-k) = a[x[n-k]] + b = T(x[n-k])
If input is x[n-k], the output becomes y(n-k) = a[x(n-k)] + b
T[x(n-k)] is not equal to y(n-k); The system is time variant
v. Memoryless
Causal systems are normally memoryless because the output at any time depend only at input
n (Phillips, 2011).
Causal systems are normally memoryless since the output at time n depend at only input at n.
Hence this system is memoryless
e. Tx[n]= ax[n] + b
i. Stable
For bounded input the output is bounded, hence the system is stable.
ii. Causual
The output of the system depends on the present value only, hence the system is causal.
iii. Linear
y1[n] = ax1[n] + b; y2[n] = ax2[n] + b
yi[n] +y2[n] = a(x1[n] + x2[n]) + 2b
T(y1[n] + y2[n]) = a(x1[n] + x2[n]) +b
Therefore, T(y1[n] + y2[n]) is not equal to T[y1[n]] + T[y2[n]]
The system is not linear
iv. Time invariant
y(n-k) = a[x[n-k]] + b = T(x[n-k])
If input is x[n-k], the output becomes y(n-k) = a[x(n-k)] + b
T[x(n-k)] is not equal to y(n-k); The system is time variant
v. Memoryless
Causal systems are normally memoryless because the output at any time depend only at input
n (Phillips, 2011).
Paraphrase This Document
Need a fresh take? Get an instant paraphrase of this document with our AI Paraphraser

Electrical Engineering 8
f. Tx[n] = x[-n]
i. Stable
For bounded input the output is bounded. The system is stable
ii. Causual
The system output depends on present value only, hence the system is causal.
iii. Linear
y1[n] = x1[-n], y2= x2[-n]
y1[n] + y2[n] = x1[-n] + x2[-n]
T[x1[-n] + x2[-n]] = T[x1[-n]] + T[x2[-n]]
Therefore, the system is linear (Reviews, 2014)
iv. Time invariant
y(n-k) = x(-n-k) = T[x(-n-k)]
If input is x(n-k), the output becomes y(-n-k) = x(-n-k)
T[(-n-k)] = y(-n-k)
The system is time variant
v. Memoryless
Causal systems are normally memoryless since output at any time depend only on input n.
g. Tx[n] = x[n] + 3u[n-1]
i. Stable
If x(n) is bounded, and Tx(n) is also bounded, then the system is stable
f. Tx[n] = x[-n]
i. Stable
For bounded input the output is bounded. The system is stable
ii. Causual
The system output depends on present value only, hence the system is causal.
iii. Linear
y1[n] = x1[-n], y2= x2[-n]
y1[n] + y2[n] = x1[-n] + x2[-n]
T[x1[-n] + x2[-n]] = T[x1[-n]] + T[x2[-n]]
Therefore, the system is linear (Reviews, 2014)
iv. Time invariant
y(n-k) = x(-n-k) = T[x(-n-k)]
If input is x(n-k), the output becomes y(-n-k) = x(-n-k)
T[(-n-k)] = y(-n-k)
The system is time variant
v. Memoryless
Causal systems are normally memoryless since output at any time depend only on input n.
g. Tx[n] = x[n] + 3u[n-1]
i. Stable
If x(n) is bounded, and Tx(n) is also bounded, then the system is stable
Electrical Engineering 9
ii. Causual
Tx[n] = x[n] + 3u[n-1]
n=-1; Tx(-1) = x(-1) + 3u(0)
n=0; Tx(0) = x(0) + 3u(-1)
n = 1; Tx(1) = x(1) + 3u(0) (Phillips, 2011)
The output depends on future input hence non-causal.
iii. Linear
y1(n) = x1[n] + 3u[n-1]
y2(n) = x2[n] + 3u[n-1]
y1(n) + y2(n) = x1[n] + x2[n] + 6u(n-1)
Therefore, T[y1(n) + y2(n)] is not equal to T[y1(n)] + T[y2(n)] (Jackson, 2015)
The system is not linear
iv. Time invariant
Tx(n-k) = x[n-k] + 3u[n-1-k] = T[x(n-k)]
If the input is x[n-k] the output become Tx[n-k] = x[n-k] + 3u[n-1-k]
T[x(n-k)] is not equal to Tx(n-k), hence the system is time invariant
v. Memoryless
Non-causal systems have memory since the output at any time do not depend on the input.
Problem 3
ii. Causual
Tx[n] = x[n] + 3u[n-1]
n=-1; Tx(-1) = x(-1) + 3u(0)
n=0; Tx(0) = x(0) + 3u(-1)
n = 1; Tx(1) = x(1) + 3u(0) (Phillips, 2011)
The output depends on future input hence non-causal.
iii. Linear
y1(n) = x1[n] + 3u[n-1]
y2(n) = x2[n] + 3u[n-1]
y1(n) + y2(n) = x1[n] + x2[n] + 6u(n-1)
Therefore, T[y1(n) + y2(n)] is not equal to T[y1(n)] + T[y2(n)] (Jackson, 2015)
The system is not linear
iv. Time invariant
Tx(n-k) = x[n-k] + 3u[n-1-k] = T[x(n-k)]
If the input is x[n-k] the output become Tx[n-k] = x[n-k] + 3u[n-1-k]
T[x(n-k)] is not equal to Tx(n-k), hence the system is time invariant
v. Memoryless
Non-causal systems have memory since the output at any time do not depend on the input.
Problem 3
Electrical Engineering 10
Show weather the following signals are periodic. If the signal is periodic, what is the period?
(a) x[n] = ej(Πn/6)
Πn/6 = 2ΠK; Π on both sides of the equation can then be cancelled.
n= 12K
Hence the signal is periodic
n=12 when the value of K=1
(b). x[n] = sin (Πn/5)/ Πn
x[n] = sin(Πn/5)
Πn
x[n] = 1/5 sin( Πn/5)
Πn
As n approaches infinity, x(n) approaches 0
This is a sampling signal, hence Non periodic
c. x[n] = ej(3Πn/4)
x[n] = ej(3Πn/4)
3Πn/4 = 2ΠK; Π on both side of the equations can be cancelled out.
Therefore; n= 8K/3;
This signal is periodic
n=8 for K= 3
d. x[n] = ejΠ√2
Πn/√2 = 2ΠK; Π on both sides of the equation can be cancelled.
Show weather the following signals are periodic. If the signal is periodic, what is the period?
(a) x[n] = ej(Πn/6)
Πn/6 = 2ΠK; Π on both sides of the equation can then be cancelled.
n= 12K
Hence the signal is periodic
n=12 when the value of K=1
(b). x[n] = sin (Πn/5)/ Πn
x[n] = sin(Πn/5)
Πn
x[n] = 1/5 sin( Πn/5)
Πn
As n approaches infinity, x(n) approaches 0
This is a sampling signal, hence Non periodic
c. x[n] = ej(3Πn/4)
x[n] = ej(3Πn/4)
3Πn/4 = 2ΠK; Π on both side of the equations can be cancelled out.
Therefore; n= 8K/3;
This signal is periodic
n=8 for K= 3
d. x[n] = ejΠ√2
Πn/√2 = 2ΠK; Π on both sides of the equation can be cancelled.
Secure Best Marks with AI Grader
Need help grading? Try our AI Grader for instant feedback on your assignments.
Electrical Engineering 11
n=2√2K
This signal is non periodic
Bibliography
Jackson, L., 2015. Signals, Systems, and Transforms, Volume 1. London: Addison-Wesley.
Phillips, C., 2011. Signals, Systems, & Transforms: International Edition. Colorado: Pearson Education
Limited.
Reviews, C., 2014. Signals, Systems, & Transforms. Michigan: Cram101.
n=2√2K
This signal is non periodic
Bibliography
Jackson, L., 2015. Signals, Systems, and Transforms, Volume 1. London: Addison-Wesley.
Phillips, C., 2011. Signals, Systems, & Transforms: International Edition. Colorado: Pearson Education
Limited.
Reviews, C., 2014. Signals, Systems, & Transforms. Michigan: Cram101.
1 out of 11

Your All-in-One AI-Powered Toolkit for Academic Success.
+13062052269
info@desklib.com
Available 24*7 on WhatsApp / Email
![[object Object]](/_next/static/media/star-bottom.7253800d.svg)
Unlock your academic potential
© 2024 | Zucol Services PVT LTD | All rights reserved.